

Advanced Stability Analysis for Fractional-Order Chaotic DC Motors Subject to Saturation and Rate Limitations



Abstract
1. Introduction
1.1. Motivation and Background
1.2. Modeling with Input Constraints
1.3. Gap and Contribution Overview
1.4. Main Contributions
- Unified stability framework: A comprehensive Lyapunov-based stability framework is developed for FO chaotic BLDCMs under input constraints including saturation, rate limits, and their combination. To our knowledge, this is the first study that considers both rate and amplitude limitations simultaneously in FO chaotic control design.
- Novel Lyapunov candidates: Tailored Lyapunov functions are constructed for each control scenario—unconstrained, saturated, rate-limited, and jointly constrained—based on a combination of direct and indirect Lyapunov methods.
- Input-constrained controller design: Multiple controller configurations are derived from stability conditions, enabling implementations with reduced sensor requirements (single-, double-, and triple-input variants).
- Benchmark validation: The effectiveness of the proposed framework is demonstrated through extensive simulations on FOBLDCMs with varying degrees of input constraints and nonlinear behavior.
1.5. Organization
2. Preliminaries
3. Main Results
3.1. No Limitation Control
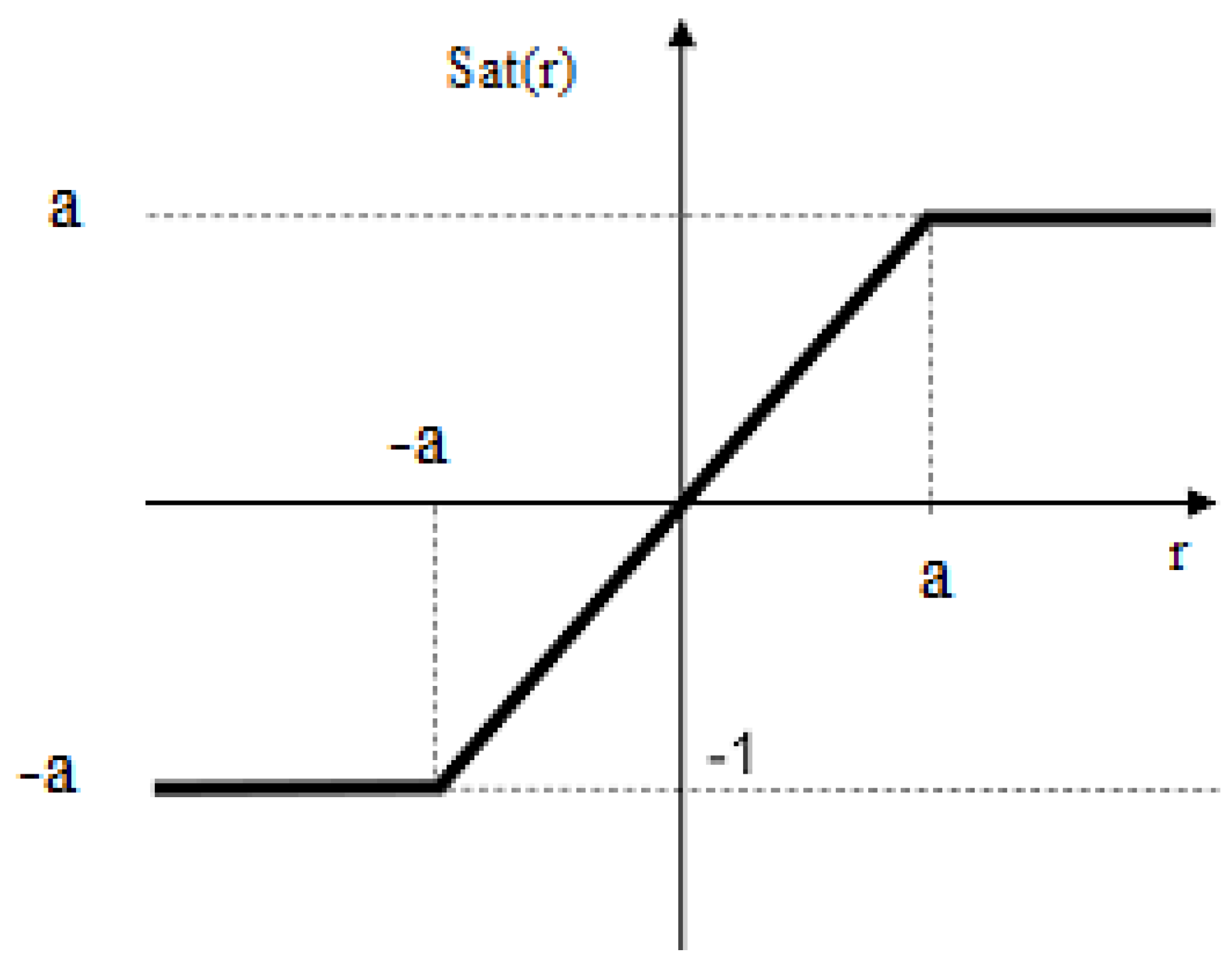
3.2. Saturation Control
3.3. Rate Limitations
3.4. Saturation and Rate Limitation Simultaneously
4. Numerical Simulations and Performance Evaluation
- Integral of squared error (ISE): Measures the accumulated squared tracking error over the simulation time for each state variable, reflecting the long-term tracking performance of the system.
- Root mean square error (RMSE): Evaluates the average deviation between the system outputs and their reference trajectories, providing a normalized metric for comparison.
- Control energy: Represents the total energy consumed by the control inputs, calculated as the integral of the squared control signal, and is used to evaluate the energy efficiency of the controller.
- Maximum control effort (): Denotes the peak value of the control input, serving as an indicator of actuator feasibility and the extent of input constraints such as saturation.
- Scenario 1: Control without any actuator limitations;
- Scenario 2: Control with rate limitation constraint only;
- Scenario 3: Control under both saturation and rate limitation constraints simultaneously.
Scenario 1: Control Without Any Actuator Limitations
- Proposed set of controllers based on available sensors: This paper introduces a comprehensive set of controllers tailored to the available sensors. In contrast, Ref. [34] proposed only a feedback linear controller, which can be considered a subset of the more general controller set presented in this work.
- Simultaneous consideration of saturation and rate limitation on the controller: This study addresses the FOBLDCM under the simultaneous constraints of saturation and rate limitation on the controller. In comparison, Ref. [34] only considered saturation as a limitation without accounting for rate limitation. Furthermore, other valuable papers did not consider any constraints [17,18,19,23,24,39].
- Robust solution approach: The proposed results in this paper are derived using a presented novel Lyapunov candidate to establish novel stability conditions in the presence of rate limitations and saturated control inputs. On the other hand, Ref. [34] relied on estimations of the solutions to the given equations, which presents a less robust approach than the one presented in this paper.
5. Conclusions
- Novel Lyapunov candidates: Dedicated Lyapunov functions are constructed for each control scenario—namely, unconstrained, saturated, rate-limited, and jointly constrained—by integrating both direct and indirect Lyapunov-based techniques tailored to fractional-order dynamics.
- Input-constrained controller design: Multiple controller configurations are derived based on the developed stability conditions, enabling practical implementation with reduced sensor dependencies through single-input, double-input, and triple-input controller variants. To the best of our knowledge, this is the first study to simultaneously address both amplitude and rate constraints in the control design of FO chaotic systems.
- Benchmark validation: The effectiveness of the proposed framework is validated through extensive numerical simulations conducted on FO chaotic BLDCMs under varying degrees of nonlinear behavior and input limitations, providing a solid benchmark for future studies.
- -
- For manufacturers: It is recommended to embed FO control logic and constraint-aware algorithms within motor control chips or firmware, enabling higher-fidelity performance in FO dynamic environments. Support for configurable constraint-aware control modules should be considered during motor drive design.
- -
- For system integrators and end users: When selecting control algorithms for high-precision or safety-critical systems, priority should be given to those that explicitly handle rate and amplitude constraints. The use of adaptable multi-input controllers can provide significant performance benefits when sensor configurations are flexible.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FOBLDCM | Fractional-order brushless DC motor |
| FC | Fractional calculus |
| FO | Fractional order |
| BLDCM | Brushless DC motor |
| PID | Proportional–integral–derivative |
| ADRC | Active disturbance rejection control |
| I&I | Immersion and Invariance |
| DSPs | Digital signal processors |
| ISE | Integral of squared error |
| RMSE | Root mean square error |
| UAVs | Unmanned aerial vehicles |
References
- Fu, H.; Wu, G.C.; Yang, G.; Huang, L.L. Fractional calculus with exponential memory. Chaos Interdiscip. J. Nonlinear Sci. 2021, 31, 031103. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhang, S. The global classical solution to compressible system with fractional viscous term. Nonlinear Anal. Real World Appl. 2024, 75, 103963. [Google Scholar] [CrossRef]
- Jiang, K.; Liu, Z.; Zhou, L. Global existence and asymptotic dynamics in a 3D fractional chemotaxis system with singular sensitivity. Nonlinear Anal. Real World Appl. 2020, 54, 103103. [Google Scholar] [CrossRef]
- Luo, H.; Tang, X. Ground state and multiple solutions for the fractional Schrödinger–Poisson system with critical Sobolev exponent. Nonlinear Anal. Real World Appl. 2018, 42, 24–52. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Zhu, S.; Zhao, H. Bifurcation and chaos detection of a fractional Duffingvan der Pol oscillator with two periodic excitations and distributed time delay. Chaos Interdiscip. J. Nonlinear Sci. 2023, 33, 083153. [Google Scholar] [CrossRef]
- Tian, Q.; Yang, X.; Zhang, H.; Xu, D. An implicit robust numerical scheme with graded meshes for the modified Burgers model with nonlocal dynamic properties. Comput. Appl. Math. 2023, 42, 246. [Google Scholar] [CrossRef]
- Alaviyan Shahri, E.S.; Alfi, A.; Tenreiro Machado, J.A. Robust stability and stabilization of uncertain fractional order systems subject to input saturation. J. Vib. Control. 2018, 24, 3676–3683. [Google Scholar] [CrossRef]
- Chen, L.; Huang, C.; Liu, H.; Xia, Y. Anti-synchronization of a class of chaotic systems with application to Lorenz system: A unified analysis of the integer order and fractional order. Mathematics 2019, 7, 559. [Google Scholar] [CrossRef]
- Li, C.; Chen, G. Chaos in the fractional order Chen system and its control. Chaos Solitons Fractals 2004, 22, 549–554. [Google Scholar] [CrossRef]
- Lu, J.G. Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 2006, 354, 305–311. [Google Scholar] [CrossRef]
- Rajagopal, K.; Vaidyanathan, S.; Karthikeyan, A.; Duraisamy, P. Dynamic analysis and chaos suppression in a fractional order brushless DC motor. Electr. Eng. 2017, 99, 721–733. [Google Scholar] [CrossRef]
- Hemati, N. Strange attractors in brushless DC motors. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 1994, 41, 40–45. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, G.; Liao, X. Global exponential stabilization for chaotic brushless DC motor with simpler controllers. Trans. Inst. Meas. Control. 2019, 41, 2678–2684. [Google Scholar] [CrossRef]
- Faradja, P.; Qi, G. Analysis of multistability, hidden chaos and transient chaos in brushless DC motor. Chaos Solitons Fractals 2020, 132, 109606. [Google Scholar] [CrossRef]
- Bi, H.; Qi, G.; Hu, J. Modeling and analysis of chaos and bifurcations for the attitude system of a quadrotor unmanned aerial vehicle. Complexity 2019, 2019, 6313925. [Google Scholar] [CrossRef]
- Kingni, S.T.; Cheukem, A.; Tsafack, A.S.; Kengne, R.; Mboupda Pone, J.R.; Wei, Z. Spiking oscillations and multistability in nonsmoothairgap brushless direct current motor: Analysis, circuit validation and chaos control. Int. Trans. Electr. Energy Syst. 2021, 31, 12575. [Google Scholar]
- Zhou, P.; Cai, H.; Yang, C. Stabilization of the unstable equilibrium points of the fractional-order BLDCM chaotic system in the sense of Lyapunov by a single-state variable. Nonlinear Dyn. 2016, 84, 2357–2361. [Google Scholar] [CrossRef]
- Zafar, Z.U.A.; Ali, N.; Tunc, C. Mathematical modelling and analysis of fractional-order brushless DC motor. Adv. Differ. Equations 2021, 2021, 433. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Ahmadian, A.; Elkamel, A.; Alhameli, F. Chaos synchronization of brushes direct current motors for electric vehicle: Adaptive fuzzy immersion and invariance approach. Trans. Inst. Meas. Control. 2021, 43, 178–193. [Google Scholar] [CrossRef]
- Abro, K.A.; Atangana, A.; Gómez-Aguilar, J.F. Chaos control and characterization of brushless DC motor via integral and differential fractal-fractional techniques. Int. J. Model. Simul. 2023, 43, 416–425. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, H.; Jin, H.; Li, H. High-dynamic and low-cost sensorless control method of high-speed brushless DC motor. IEEE Trans. Ind. Inform. 2022, 19, 5576–5584. [Google Scholar] [CrossRef]
- Souhail, W.; Khammari, H. Sensorless anti-control and synchronization of chaos of brushless DC motor driver. Sci. Rep. 2025, 15, 13899. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Bai, R.J.; Zheng, J.M. Stabilization of a fractional-order chaotic brushless DC motor via a single input. Nonlinear Dyn. 2015, 82, 519–525. [Google Scholar] [CrossRef]
- Zhong, X.; Shahidehpour, M.; Zou, Y. Global quasi-Mittag-Leffler stability of distributed-order BLDCM system. Nonlinear Dyn. 2022, 108, 2405–2416. [Google Scholar] [CrossRef]
- Yu, Z.; Sun, Y.; Dai, X. Stability and stabilization of the fractional-order power system with time delay. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3446–3450. [Google Scholar] [CrossRef]
- Mok, R.; Ahmad, M.A. Smoothed functional algorithm with norm-limited update vector for identification of continuous-time fractional-order Hammerstein models. IETE J. Res. 2024, 70, 1814–1832. [Google Scholar] [CrossRef]
- Wang, J.; Ji, Y.; Ding, F. Iterative parameter estimation for a class of fractional-order Hammerstein nonlinear systems disturbed by colored noise. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2025. [Google Scholar] [CrossRef]
- Alsaadi, F.E.; Jahanshahi, H.; Yao, Q.; Mou, J. Recurrent neural network-based technique for synchronization of fractional-order systems subject to control input limitations and faults. Chaos Solitons Fractals 2023, 173, 113717. [Google Scholar] [CrossRef]
- Yuan, J.; Fei, S.; Chen, Y.; Ding, Y. Robust feedback compensation and PID Tuning under actuator rate limit effect based on Bode s integrals. Control. Eng. Pract. 2022, 129, 105347. [Google Scholar] [CrossRef]
- Wu, Z.; Yuan, J.; Liu, Y.; Li, D.; Chen, Y. An active disturbance rejection control design with actuator rate limit compensation for the ALSTOM gasifier benchmark problem. Energy 2021, 227, 120447. [Google Scholar] [CrossRef]
- Alaviyan Shahri, E.S.; Balochian, S. An analysis and design method for fractional order linear systems subject to actuator saturation and disturbance. Optim. Control. Appl. Methods 2016, 37, 305–322. [Google Scholar] [CrossRef]
- Shahri, E.S.A.; Balochian, S. Stability region for fractional-order linear system with saturating control. J. Control. Autom. Electr. Syst. 2014, 25, 283–290. [Google Scholar] [CrossRef]
- Alaviyan Shahri, E.S.; Balochian, S. A stability analysis on fractional order linear system with nonlinear saturated disturbance. Natl. Acad. Sci. Lett. 2015, 38, 409–413. [Google Scholar] [CrossRef]
- Alaviyan Shahri, E.S.; Alfi, A.; Tenreiro Machado, J.A. Stability analysis of a class of nonlinear fractional order systems under control input saturation. Int. J. Robust Nonlinear Control. 2018, 28, 2887–2905. [Google Scholar] [CrossRef]
- Alaviyan Shahri, E.S.; Pariz, N.; Chen, Y. Stabilization of a Class of Fractional-Order Nonlinear Systems Subject to Actuator Saturation and Time Delay. Appl. Sci. 2025, 15, 1851. [Google Scholar] [CrossRef]
- Chen, Y.; Wei, Y.; Zhou, X.; Wang, Y. Stability for nonlinear fractional order systems: An indirect approach. Nonlinear Dyn. 2017, 89, 1011–1018. [Google Scholar] [CrossRef]
- Wang, B.; Ding, J.; Wu, F.; Zhu, D. Robust finite-time control of fractional-order nonlinear systems via frequency distributed model. Nonlinear Dyn. 2016, 85, 2133–2142. [Google Scholar] [CrossRef]
- Tan, Y.; Xiong, M.; Du, D.; Fei, S. Observer-based robust control for fractional-order nonlinear uncertain systems with input saturation and measurement quantization. Nonlinear Anal. Hybrid Syst. 2019, 34, 45–57. [Google Scholar] [CrossRef]
- Huang, S.; Wang, B. Stabilization of a fractional-order nonlinear brushless direct current motor. J. Comput. Nonlinear Dyn. 2017, 12, 041005. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Design Controller | |
|---|---|---|
| Single Input | ||
| Double Input | ||
| Triple Input | ||
| Triple Input | ||
| Performance Indices | ISE | RMSE | Control Energy | |
|---|---|---|---|---|
| Controller from [39] | ||||
| Our proposed controller (close to [39]) | ||||
| Proposed controller Scenario 1 |
| Rate Limitation | Input | Design Controller |
|---|---|---|
| Single Input | ||
| Double Input | ||
| Triple Input | ||
| Single Input | ||
| Double Input | ||
| Double Input | ||
| Triple Input |
| Performance Indices | ISE | RMSE | Control Energy | |
|---|---|---|---|---|
| Proposed controller Scenario 3 |
| Feature | Proposed Work | [34] | [39] |
|---|---|---|---|
| Controller design based on sensor availability | Comprehensive set (single/double/triple input) | Only feedback linearization | Only feedback linearization |
| Constraints considered | Both saturation and rate limitation | Only saturation | No constraints |
| Stability analysis method | Lyapunov-based analytical approach | Estimation-based | Estimation-based |
| Robustness | High (based on derived sufficient conditions) | Moderate lack of rate-limit handling | Moderate lack of saturation and rate-limit handling |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alaviyan Shahri, E.S.; Chen, Y.; Pariz, N. Advanced Stability Analysis for Fractional-Order Chaotic DC Motors Subject to Saturation and Rate Limitations. Fractal Fract. 2025, 9, 369. https://doi.org/10.3390/fractalfract9060369
Alaviyan Shahri ES, Chen Y, Pariz N. Advanced Stability Analysis for Fractional-Order Chaotic DC Motors Subject to Saturation and Rate Limitations. Fractal and Fractional. 2025; 9(6):369. https://doi.org/10.3390/fractalfract9060369
Chicago/Turabian StyleAlaviyan Shahri, Esmat Sadat, Yangquan Chen, and Naser Pariz. 2025. "Advanced Stability Analysis for Fractional-Order Chaotic DC Motors Subject to Saturation and Rate Limitations" Fractal and Fractional 9, no. 6: 369. https://doi.org/10.3390/fractalfract9060369
APA StyleAlaviyan Shahri, E. S., Chen, Y., & Pariz, N. (2025). Advanced Stability Analysis for Fractional-Order Chaotic DC Motors Subject to Saturation and Rate Limitations. Fractal and Fractional, 9(6), 369. https://doi.org/10.3390/fractalfract9060369