
Using He’s Two-Scale Fractal Transform to Predict the Dynamic Response of Viscohyperelastic Elastomers with Fractal Damping

 ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. A Dynamic Viscohyperelastic Model of Elastomer Materials
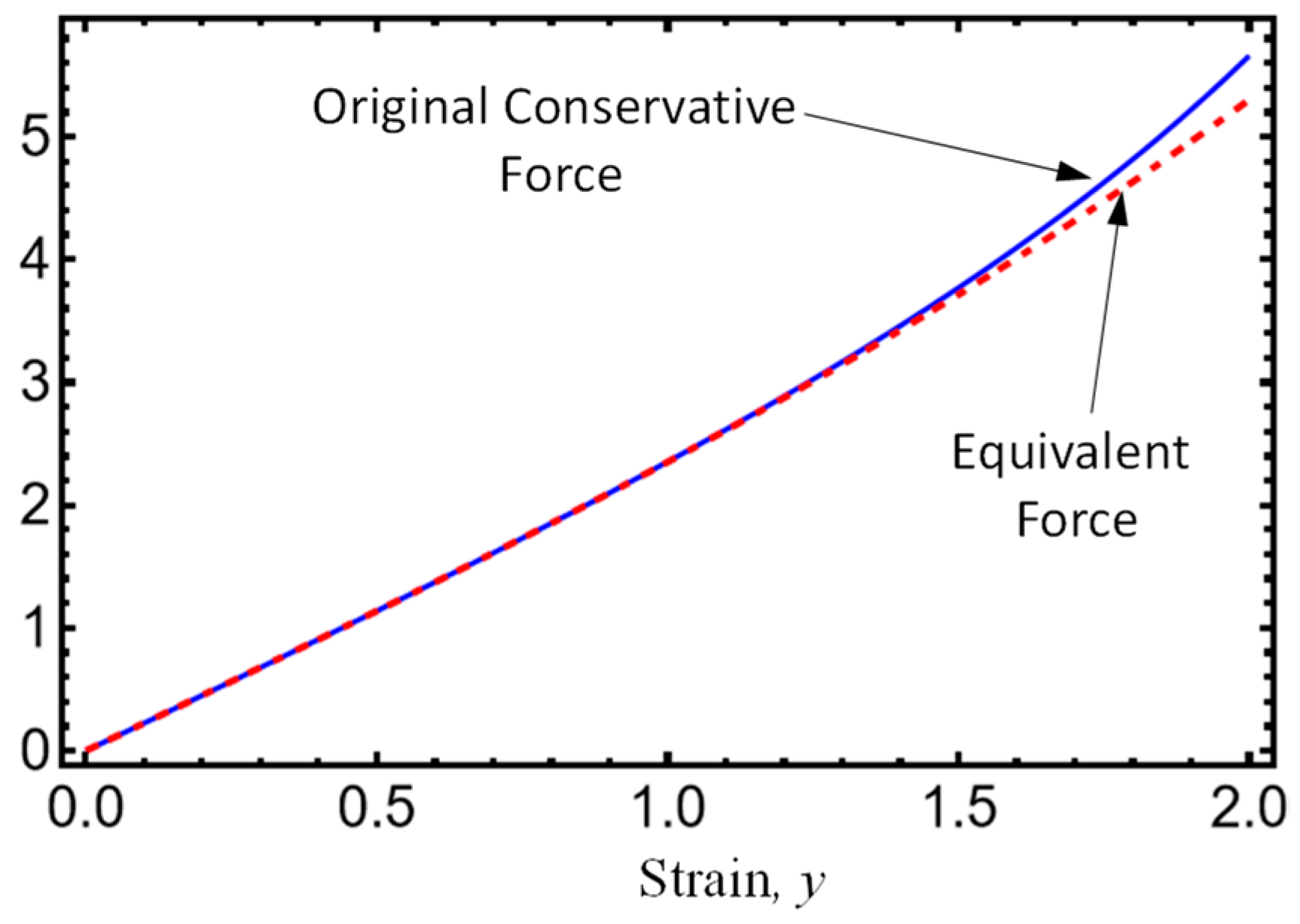
Equivalent Conservative Restoring Force
3. Approximate Solution
4. Results
4.1. Equivalent Representation Form
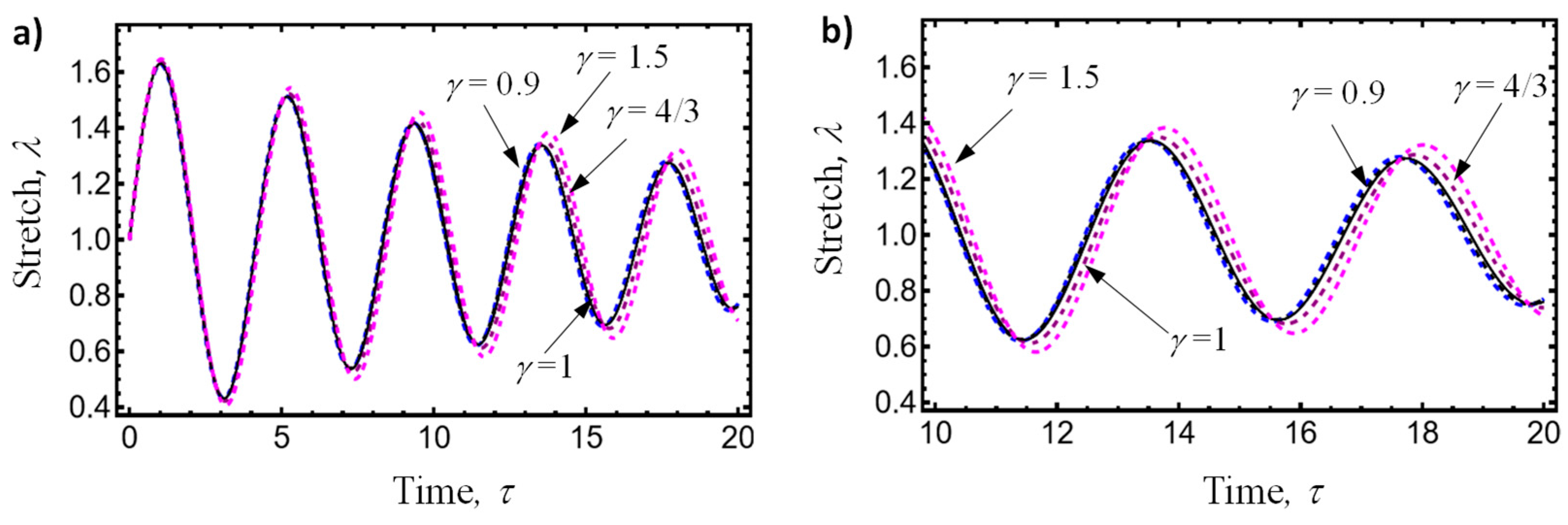
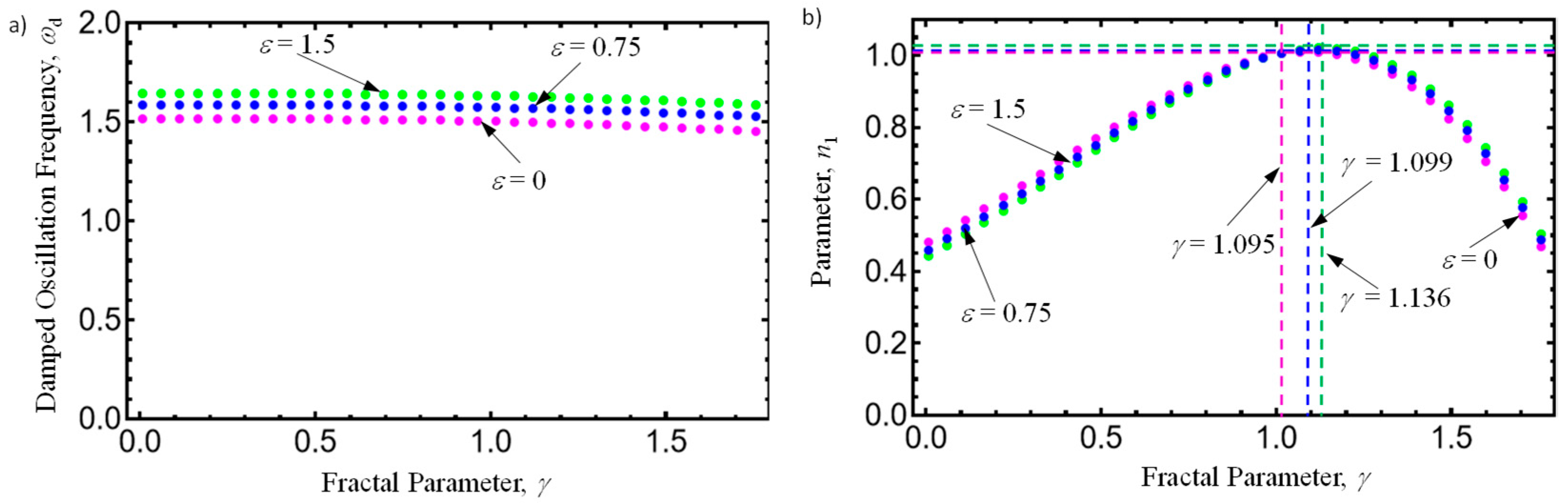
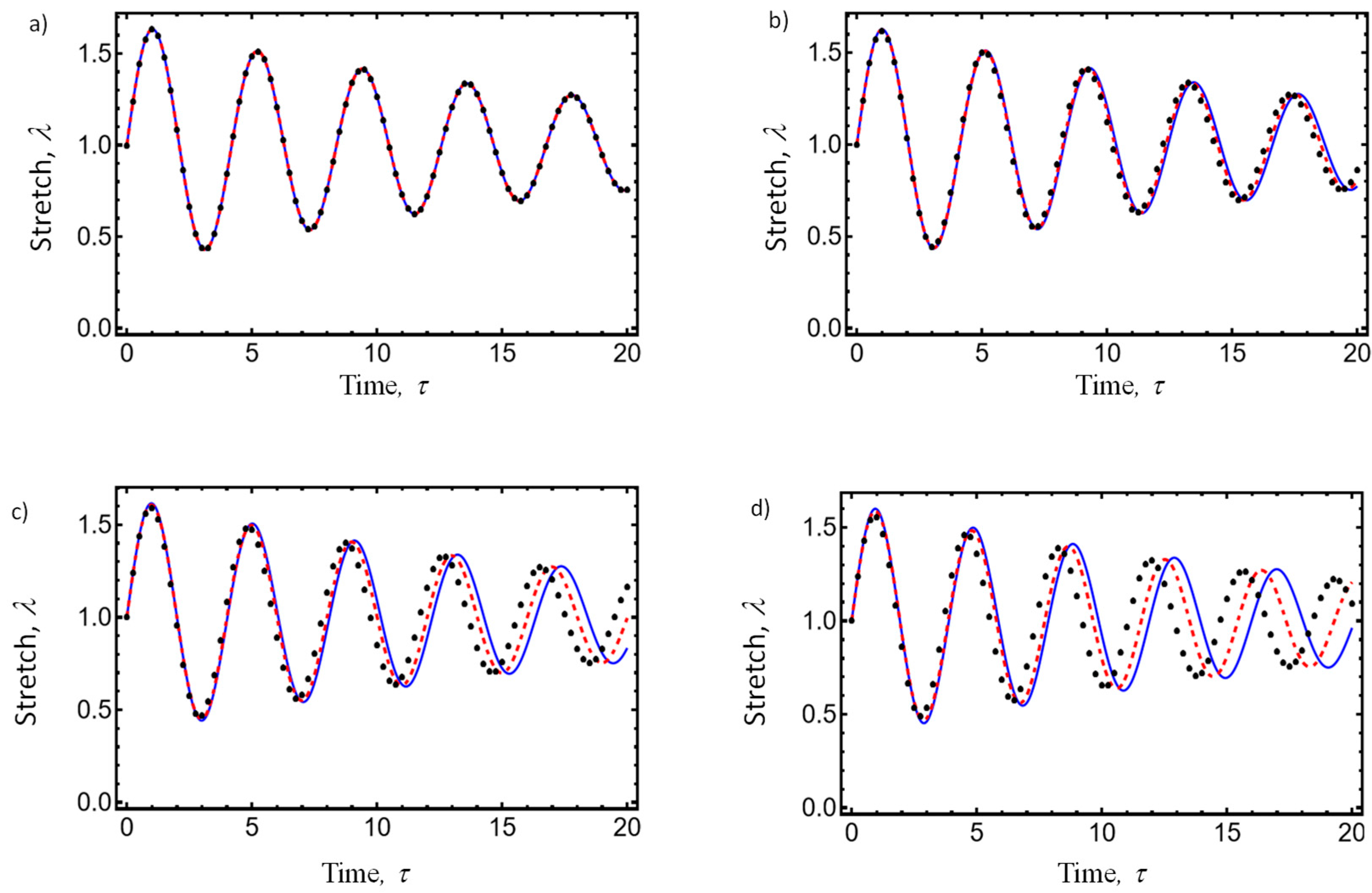
4.2. Numerical Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ain, Q.T.; He, J.-H. On two-scale dimension and its applications. Therm. Sci. 2019, 23, 1707–1712. [Google Scholar] [CrossRef]
- He, J.H.; Ji, F.Y. Two-scale mathematics and fractional calculus for thermodynamics. Therm. Sci. 2019, 23, 2131–2213. [Google Scholar] [CrossRef]
- He, J.H.; Qie, N.; He, C.H.; Saeed, T. On a strong minimum condition of a fractal variational principle. Appl. Math. Lett. 2021, 119, 107199. [Google Scholar] [CrossRef]
- He, J.H.; Qie, N.; He, C.H. Solitary waves travelling along an unsmooth boundary. Results Phys. 2021, 24, 104104. [Google Scholar] [CrossRef]
- He, J.H.; Hou, W.F.; Qie, N.; Gerepreel, K.A.; Shirazi, A.H.; Sedighi, H.M. Hamiltonian-based frequency-amplitude formulation for nonlinear oscillators. FU Mech. Eng. 2021, 19, 199–208. [Google Scholar] [CrossRef]
- Wang, K.L. Effect of Fangzhu’s nano-scale surface morphology on water collection. Math. Methods Appl. Sci. 2020. [Google Scholar] [CrossRef]
- He, C.-H.; Liu, C.; He, J.-H.; Gepreel, K.A. Low frequency property of a fractal vibration model for a concrete beam. Fractals 2021, 29, 2150117. [Google Scholar] [CrossRef]
- He, J.-H.; Kou, S.-J.; He, C.-H.; Zhang, Z.-W.; Gepreel, K.A. Fractal oscillation and its frequency-amplitude property. Fractals 2021, 29, 2150105. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Palacios-Pineda, L.M.; Jiménez-Cedeño, I.H.; MartínezRomero, O.; Olvera-Trejo, D. Investigation of the steady-state solution of the fractal forced Duffing’s oscillator using an ancient Chinese algorithm. Fractals 2021, 29, 2150133. [Google Scholar] [CrossRef]
- Feng, G.-Q. He’s frequency formula to fractal undamped Duffing equation. J. Low Freq. Noise Vib. Act. Control 2021, 40, 1671–1676. [Google Scholar] [CrossRef]
- Wang, K.-L.; Wei, C.-F. A powerful and simple frequency formula to nonlinear fractal oscillators. J. Low Freq. Noise Vib. Act. Control 2021, 40, 1373–1379. [Google Scholar] [CrossRef]
- He, J.-H. A fractal variational theory for one-dimensional compressible flow in a microgravity space. Fractals 2020, 28, 2050024. [Google Scholar] [CrossRef]
- Naveed, A.; He, C.-H.; He, J.-H. Two-scale fractal theory for the population dynamics. Fractals 2021, 29, 2150182. [Google Scholar]
- Elías-Zúñiga, A.; Martínez-Romero, O.; Olvera-Trejo, D.; Palacios-Pineda, L.M. Fractal equation of motion of a non-Gaussian polymer chain: Investigating its dynamic fractal response using an ancient Chinese algorithm. J. Math. Chem. 2022, 60, 461–473. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Martínez-Romero, O.; Palacios-Pineda, L.M.; Olvera-Trejo, D. New analytical solution of the fractal anharmonic oscillator using an ancient Chinese algorithm: Investigating how plasma frequency changes with fractal parameter values. J. Low Freq. Noise Vib. Act. Control 2022, 41, 833–841. [Google Scholar] [CrossRef]
- El-Dib, Y.O.; Elgazery, N.S.; Khattab, Y.M.; Alyousef, H.A. An innovative technique to solve a fractal damping Duffing-jerk oscillator. Commun. Theor. Phys. 2023, 75, 055001. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar]
- Nutting, P.D. A new general law of deformation. J. Frankl. Inst. 1921, 19, 679–685. [Google Scholar] [CrossRef]
- Singh, S.K.; Prakash, O.; Bhattacharya, S. Hybrid fractal acoustic metamaterials for low-frequency sound absorber based on cross mixed micro-perforated panel mounted over the fractals structure cavity. Sci. Rep. 2022, 12, 20444. [Google Scholar] [CrossRef]
- D’Abbicco, M.; Longen, L.G. The interplay between fractional damping and nonlinear memory for the plate equation. Math. Meth. Appl. Sci. 2022, 45, 6951–6981. [Google Scholar] [CrossRef]
- Pan, W.; Li, X.; Guo, N.; Yang, Z.; Sun, Z. Three-dimensional fractal model of normal contact damping of dry-friction rough surface. Adv. Mech. Eng. 2017, 9, 1687814017692699. [Google Scholar] [CrossRef]
- Su, W.H.; Baleanu, D.; Yang, X.J.; Jafari, H. Damped wave equation and dissipative wave equation in fractal strings within the local fractional variational iteration method. Fixed Point Theory Appl. 2013, 89, 2013. [Google Scholar] [CrossRef]
- Yang, X.J.; Srivastava, H.M. An asymptotic perturbation solution for a linear oscillator of free damped vibrations in fractal medium described by local fractional derivatives. Commun. Nonlinear Sci. Numer. Simul. 2015, 29, 499–504. [Google Scholar] [CrossRef]
- Jimenez, F.; Ober-Blöbaum, S. Fractional Damping Through Restricted Calculus of Variations. J. Nonlinear Sci. 2021, 31, 46. [Google Scholar] [CrossRef]
- El-Dib, Y.O. Immediate solution for fractional nonlinear oscillators using the equivalent linearized method. J. Low Freq. Noise Vib. Act. Control 2022, 41, 1411–1425. [Google Scholar] [CrossRef]
- Coccolo, M.; Seoane, J.M.; Lenci, S.; Sanjuán, M.A.F. Fractional damping effects on the transient dynamics of the Duffing oscillator. Commun. Nonlinear Sci. Numer. Simul. 2023, 117, 106959. [Google Scholar] [CrossRef]
- El-Dib, Y.O.; Elgazery, N.S. A novel pattern in a class of fractal models with the non-pertubative approach. Chaos Solitons Fractals 2022, 164, 112694. [Google Scholar] [CrossRef]
- El-Dib, Y.O.; Elgazery, N.S. An efficient approach to converting the damping fractal models to the traditional system. Commun. Nonlinear Sci. Numer. Simul. 2023, 118, 107036. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Miles, P.; Hussaini, M.Y.; Oates, W.S. Fractional viscoelasticity in fractal and non-fractal media: Theory, experimental validation, and uncertainty analysis. J. Mech. Phys. Solids 2018, 111, 134–156. [Google Scholar] [CrossRef]
- Cai, W.; Wang, P. Rate-dependent fractional constitutive model for nonlinear behaviors of rubber polymers. Eur. J. Mech. A/Solid 2024, 103, 105186. [Google Scholar] [CrossRef]
- Han, B.; Yin, D.; Gao, Y. The application of a novel variable-order fractional calculus on rheological model for viscoelastic Materials. Mech. Adv. Mater. Struct. 2024, 31, 9951–9963. [Google Scholar] [CrossRef]
- Color, J.L.; Palacios-Pineda, L.M.; Perales-Martínez, I.A.; MartínezRomero, O.; Olvera-Trejo, D.; Ramírez-Herrera, C.A.; Del Ángel Sánchez, K.; Elías-Zúñiga, A. Study on the stiffness and damping properties of magnetorheological elastomers subjected to biaxial loads and a magnetic field. Polym. Test. 2025, 146, 108777. [Google Scholar] [CrossRef]
- He, J.-H. Transforming frontiers: The next decade of differential equations and control processes. Adv. Differ. Equ. Control Process. 2025, 32, 2589. [Google Scholar] [CrossRef]
- Ross, B. A brief history and exposition of the fundamental theory of fractional calculus. In Fractional Calculus and Its Applications; Springer lecture notes in mathematics; Springer: Berlin/Heidelberg, Germany, 1975; Volume 57, pp. 1–36. [Google Scholar]
- Syam, M.I.; Al-Refai, M. Fractional differential equations with Atangana—Baleanu fractional derivative: Analysis and applications. Chaos Solitons Fractals X 2019, 2, 100013. [Google Scholar] [CrossRef]
- Yépez-Martínez, H.; Gómez-Aguilar, J.F. A new modified definition of Caputo—Fabrizio fractional-order derivative and their applications to the Multi Step Homotopy Analysis Method (MHAM). J. Comput. Appl. Math. 2019, 346, 247–260. [Google Scholar] [CrossRef]
- Sehra, H.S.; Haq, S.U.; Alhazmi, H.; Khan, I.; Niazai, S. A comparative analysis of three distinct fractional derivatives for a second grade fluid with heat generation and chemical reaction. Sci. Rep. 2024, 14, 4482. [Google Scholar] [CrossRef]
- Novikov, V.V.; Voltsekhovskii, K.V. Viscoelastic properties of fractal media. J. Appl. Mech. Tech. Phys. 2000, 41, 149–158. [Google Scholar] [CrossRef]
- Metzler, R.; Nonnenmacher, T.F. Fractional relaxation processes and fractional rheological models for the description of a class of viscoelastic materials. Int. J. Plast. 2003, 19, 941–959. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Hussaini, M.Y.; Oates, W. A physical interpretation of fractional viscoelasticity based on the fractal structure of media: Theory and experimental validation. J. Mech. Phys. Solids 2019, 128, 137–150. [Google Scholar] [CrossRef]
- Tschoegl, N.W. The Phenomenological Theory of Linear Viscoelastic Behavior: An Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Palacios-Pineda, L.M.; Elias-Zuniga, A.; Perales-Martinez, I.A.; Martinez-Romero, O.; Olvera-Trejo, D. The fractal rheology of magnetorheological elastomers described through the modified Zener model and the Cole-Cole plot. Fractals 2024, 32, 2450087. [Google Scholar] [CrossRef]
- Rickaby, S.R.; Scott, N.H. A comparison of limited-stretch models of rubber. Int. J. Non-Linear Mech. 2015, 68, 71–86. [Google Scholar] [CrossRef]
- Jedynak, R. New facts concerning the approximation of the inverse Langevin function. J. Non-Newton. Fluid Mech. 2017, 249, 8–25. [Google Scholar] [CrossRef]
- Sheikholeslami, S.A.; Aghdam, M.M. A novel rational Padé approximation of the inverse Langevin function. In Proceedings of the 25th Annual International Conference on Mechanical Engineering ISME2017, Tehran, Iran, 2–4 May 2017. [Google Scholar]
- Jedynak, R. A comprehensive study of the mathematical methods used to approximate the inverse Langevin function. Math. Mech. Solids 2019, 24, 1992–2016. [Google Scholar] [CrossRef]
- Pahari, B.R.; Stanisauskis, E.; Mashayekhi, S.; Oates, W. An Entropy Dynamics Approach for Deriving and Applying Fractal and Fractional Order Viscoelasticity to Elastomers. J. Appl. Mech. 2023, 90, 081009. [Google Scholar] [CrossRef]
- He, J.-H. A tutorial review on fractal spacetime and fractional calculus. Int. J. Theor. Phys. 2014, 53, 3698–3718. [Google Scholar] [CrossRef]
- He, J.-H. Fractal calculus and its geometrical explanation. Results Phys. 2018, 10, 272–276. [Google Scholar] [CrossRef]
- He, J.-H.; Ain, Q.T. New promises and future challenges of fractal calculus: From two-scale thermodynamics to fractal variational principle. Therm. Sci. 2020, 24, 659–681. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Palacios-Pineda, L.M.; Martínez-Romero, O.; Olvera-Trejo, D. Equivalent representation form in the sense of Lyapunov, of nonlinear forced, damped second-order differential equations. Nonlinear Dyn. 2018, 92, 2143–2158. [Google Scholar] [CrossRef]
- Iwan, W.D. On defining equivalent systems for certain ordinary non-linear differential equations. Int. J. Non-Linear Mech. 1969, 4, 325–334. [Google Scholar] [CrossRef]
- Iwan, W.D. A generalization of the concept of equivalent linearization. Int. J. Non-Linear Mech. 1973, 4, 279–287. [Google Scholar] [CrossRef]
- Agrwal, V.P.; Denman, H.H. Weighted linearization technique for period approximation in large amplitude non-linear oscillations. J. Sound Vib. 1985, 99, 463–473. [Google Scholar] [CrossRef]
- Yuste, S.B.; Sánchez, A.M. A weighted mean-square method of cubication for non-linear oscillators. J. Sound Vib. 1989, 134, 423–433. [Google Scholar] [CrossRef]
- Yuste, S.B. Cubication of non-linear oscillators using the principle of harmonic balance. Int. J. Non-Linear Mech. 1992, 27, 347–356. [Google Scholar] [CrossRef]
- Von Wagner, U.; Lents, L. On the detection of artifacts in Harmonic Balance solutions of nonlinear oscillators. Appl. Math. Model. 2019, 65, 408–414. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Palacios-Pineda, L.M.; Jiménez-Cedeño, I.H.; Martínez Romero, O.; Olvera-Trejo, D. He’s frequency–Amplitude formulation for nonlinear oscillators using Jacobi elliptic functions. J. Low Freq. Noise Vib. Act. Control. 2020, 39, 1216–1223. [Google Scholar] [CrossRef]
- Yu, J.; Breite, C.; Van Loock, F.; Pardoen, T.; Swolfs, Y. Experimental investigation of yield and hysteresis behaviour of an epoxy resin under cyclic compression in the large deformation regime. Express Polym. Lett. 2024, 18, 133–144. [Google Scholar] [CrossRef]
- Gómez-Aguilar, J.F.; Yépez-Martínez, H.; Calderón-Ramón, C.; Cruz-Orduña, I.; Escobar-Jiménez, R.F.; Olivares-Peregrino, V.H. Modeling of a Mass-Spring-Damper System by Fractional Derivatives with and without a Singular Kernel. Entropy 2015, 17, 6289–6303. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elías-Zúñiga, A.; Martínez-Romero, O.; Olvera-Trejo, D.; Palacios-Pineda, L.M. Using He’s Two-Scale Fractal Transform to Predict the Dynamic Response of Viscohyperelastic Elastomers with Fractal Damping. Fractal Fract. 2025, 9, 357. https://doi.org/10.3390/fractalfract9060357
Elías-Zúñiga A, Martínez-Romero O, Olvera-Trejo D, Palacios-Pineda LM. Using He’s Two-Scale Fractal Transform to Predict the Dynamic Response of Viscohyperelastic Elastomers with Fractal Damping. Fractal and Fractional. 2025; 9(6):357. https://doi.org/10.3390/fractalfract9060357
Chicago/Turabian StyleElías-Zúñiga, Alex, Oscar Martínez-Romero, Daniel Olvera-Trejo, and Luis Manuel Palacios-Pineda. 2025. "Using He’s Two-Scale Fractal Transform to Predict the Dynamic Response of Viscohyperelastic Elastomers with Fractal Damping" Fractal and Fractional 9, no. 6: 357. https://doi.org/10.3390/fractalfract9060357
APA StyleElías-Zúñiga, A., Martínez-Romero, O., Olvera-Trejo, D., & Palacios-Pineda, L. M. (2025). Using He’s Two-Scale Fractal Transform to Predict the Dynamic Response of Viscohyperelastic Elastomers with Fractal Damping. Fractal and Fractional, 9(6), 357. https://doi.org/10.3390/fractalfract9060357