1. Introduction
The Kuramoto–Sivashinsky (KS) equation belongs to an important class of chaotic partial differential equations that serve as a bridge between the partial differential equation and dynamical system frameworks. Kuramoto [
1] originally proposed the KS equation in his study of phase turbulence in reaction–diffusion systems, while Sivashinsky [
2] introduced it in his analysis of flame combustion propagation models. The KS equation has a wide range of applications in simulation science and engineering, such as the evolution of the flow of fluid films on inclined planes [
3], flame front instability [
4], interfacial turbulence [
5], etc.
In this paper, we study the time-fractional KS equation with the generalized Burgers’ type nonlinearity:
with the initial condition (IC)
and the boundary conditions (BCs)
where
is the viscosity coefficient,
is a positive integer, perturbation parameters
,
are fixed values, and
and
are prescribed real functions. The equations are complex, and their combination of fractional-order derivative KS equations and Burgers’ nonlinear terms provides them with greater flexibility to capture the intricate dynamical behaviors observed in various physical systems.
- •
When the fourth-order derivative
and the source term are not included in the equation, Equation (
1) transforms into a time-fractional generalized Burgers equation [
6] as follows:
where
is the generalized Burgers’ type nonlinearity.
- •
When
,
, Equation (
1) is the usual KS equation as follows:
and many pioneering studies have been carried out [
7,
8,
9].
- •
When
, Equation (
1) is the generalized fractional KS equation [
10] as follows:
In recent years, numerical computational algorithms for solving the time-fractional KS equation have been developed and become imperative. Many numerical methods are already available for studying KS equations, including those of the form presented in Equation (
5). Mittal [
11] proposed a quintic B-spline collocation method based on the Crank–Nicolson scheme for temporal discretization, aimed at approximating the solution to the KS equation. In [
12], a locally discontinuous Galerkin method is implemented to obtain the numerical solution to the KS equation. The implicit–explicit BDF method was developed by Akrivis and Smyrlis [
13] for simulating the KS equation.
However, there are few research studies on effective numerical algorithms for solving fractional KS equations. For the fractional KS equation of the type Equation (
6), the weak singularity of the solution generated by the fractional derivative presents a difficult problem to solve. At present, the effective method to solve this problem is to use the variable step numerical method, which concentrates more grid points around the weak singularity and employs a sparse grid where the solution changes slowly. Indeed, the
formula for the construction of piecewise linear interpolation was proposed by Langlands [
14], which leads to a temporal convergence order of
for
. Since then, the
formula has been widely used to deal with Caputo fractional derivatives [
15,
16,
17,
18,
19,
20]. Furthermore, for the numerical solution to pure sub-diffusion equations, there are several high-order discrete convolution forms for the approximation of the Caputo fractional-order time derivatives, such as the
scheme [
21,
22,
23] and the
formula, which is based on linear interpolation on the last subinterval
and quadratic polynomial interpolation on the rest of the subintervals
(for details, please refer to [
24]). These formulas can achieve second-order temporal accuracy for sufficiently smooth solutions.
Due to the advantages of the
formula, we will study the approximation of the Caputo fractional derivative by the variable time-step Alikhanov formula. Influenced by [
25,
26], we also give the regularity assumptions on the exact solution
u as follows:
where
, and
is a regularity parameter. In this paper, we only consider the case of
.
In order to obtain a more efficient algorithm for solving the problem and avoid the issue of large computational costs caused by the historical dependence of the fractional derivative, one of the most effective methods is the SOE technique [
27,
28,
29], which is applied in approximating the convolution kernel
with a uniform absolute error
. There have been many research studies on the nonlinear KS equation with a spatial fourth derivative, employing various methods such as the quintic B-spline collocation method [
30], cubic Hermite collocation [
31], Chebyshev collocation method [
10], and Sinc–Galerkin method [
32]. The compact difference scheme has good characteristics and high accuracy and is widely used to solve a variety of equations [
33,
34,
35,
36,
37]. The application of a compact difference scheme to the spatial discretization of fractional KS equations is exactly the starting point of our present work. The theoretical part of the proof makes use of the classical energy method [
38,
39,
40]. Moreover, the main contributions of this work can be summarized as follows:
- •
For the complex KS equation, we first apply the non-uniform Alikhanov formula to approximate the Caputo fractional derivative, and then treat the generalized Burgers’ nonlinear term. Then, we combine the second-order time scheme and the SOE technique to establish the fast Alikhanov second-order scheme. This approach improves numerical accuracy and reduces computational costs.
- •
The high-order compact difference scheme is proposed for the first time to be applied to the KS equation with the generalized Burgers’ nonlinear term, which can improve the spatial convergence rate to the fourth order.
- •
We demonstrate in detail the convergence and stability of the fully discrete scheme by the energy argument. In addition, we provide numerical examples to validate the theoretical analysis and demonstrate the efficiency of the algorithm by comparing fast and non-fast Alikhanov schemes.
The outline of this paper is as follows: In
Section 2, we introduce some useful notations and lemmas. Additionally, some properties of compact difference formulas and fast Alikhanov formulas are analyzed. In
Section 3, the high-order fast Alikhanov compact difference scheme is constructed. The stability and convergence of a full-discrete scheme are investigated. Numerical examples verify the stability and efficiency of the algorithm and the correctness of the theory in
Section 4. The conclusion is summarized in
Section 5.
4. Numerical Experiment
In this section, we test the stability and convergence of the fast compact schemes (22)–(26) for three different experiments on a nonuniform grid
. All experiments were performed on a Windows server with an AMD Ryzen 5 4600H processor of 16 GB RAM and 3.00 GHz CPU. In the following experiments, the tolerance accuracy of the SOE algorithm is limited to
in order to balance accuracy and efficiency [
6]. The following suitable formulas are given to calculate the error and convergence order of the following numerical solution:
where
and
represent the exact and numerical solutions at the
time level, respectively.
In addition, we define the following notation to illustrate the numerical implementation of the proposed scheme:
Before proceeding further, let us remark on the numerical scheme setting of the fast Alikhanov approach and Alikhanov approach.
Alikhanov scheme: The Caputo fractional derivative discretization scheme is (
12).
Fast Alikhanov scheme: The Caputo fractional derivative discretization scheme is (
14).
Example 1. In this example, we consider the following problem:and the exact solution is set as Accordingly, the initial condition and the source term are as follows: For Example 1, in
Table 1, we fix
,
, and
to explore the performances of the fast Alikhanov and Alikhanov schemes in terms of errors in the
-norm and the convergence order for different
and
p cases. It can be found that the errors in the
-norm of the Alikhanov and fast Alikhanov schemes are very close and both of them can reach second-order convergence in the temporal direction with
and
. When
, the value of
keeps on changing, the errors in Alikhanov and fast Alikhanov schemes have the same effect and also achieve second-order convergence.
Table 2 shows the errors and convergence orders in the spatial direction for different
and
p when fixing
,
, and
. It can be observed that regardless of whether
changes or
p changes, the spatial errors in the
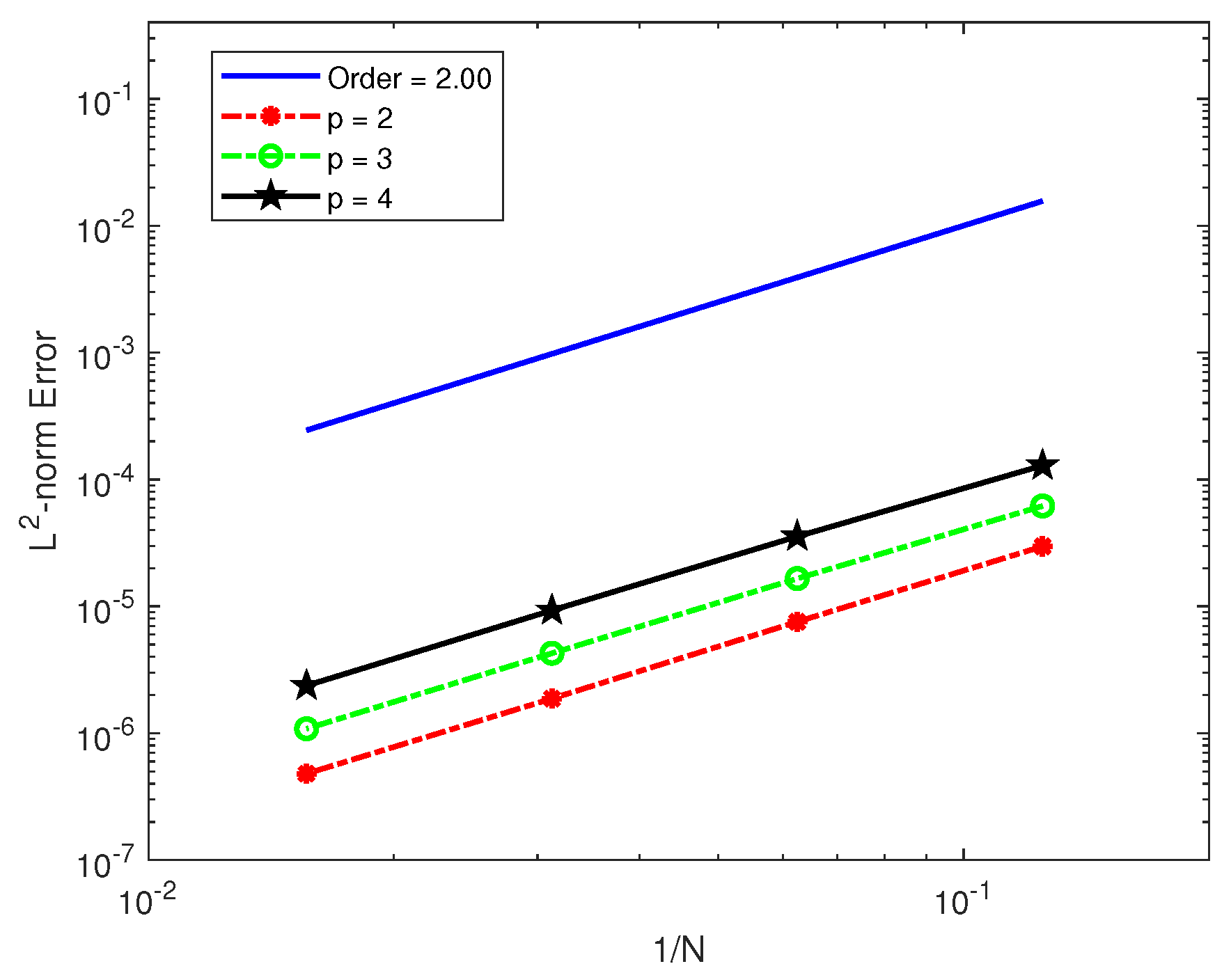
-norm of the two schemes are similar and both can achieve fourth-order convergence in agreement with the theoretical prediction.
Table 3 considers the cases where
,
,
, and
are fixed, with
changing, which indicates that the fast Alikhanov and Alikhanov schemes can achieve similar spatial errors and fourth-order convergence. The CPU times of the two algorithms are given; it is obvious that the fast Alikhanov scheme is much faster than the Alikhanov scheme. In order to further confirm whether the temporal and spatial convergence orders of the fast Alikhanov scheme remain stable as
p increases, the temporal convergence and spatial convergence orders are shown in
Figure 1 and
Figure 2.
Table 4 shows that with the gradual increase in
N, the value of
tends to stabilize and shows no increasing trend. These results confirm the numerical stability of the proposed scheme in the time direction.
Example 2. In order to verify the wide range of applications of the numerical scheme, the case where the exact solution is unknown is tested in this numerical example. We consider problems (
1)–(
3)
in to verify the effectiveness and high accuracy of the numerical scheme. Let , the initial condition is , and the source term is . In
Table 5, the errors in the
-norm, spatial convergence orders, and CPU times of the Alikhanov scheme and the fast Alikhanov numerical scheme are presented for fixed values of
,
,
, and
, with
. It is worth mentioning that both numerical schemes can achieve the same approximation effect, but the CPU time of the fast scheme is much shorter.
Table 6 demonstrates that for fixed values of
,
,
, and
, the
-norm error decreases as the number of temporal subintervals increases. It is expected that the convergence order of the fast approximate scheme is
. Meanwhile, the error and convergence order remain as expected for changing values of
p, suggesting that the approximation scheme is stable for different
p.
Table 7 shows the errors, temporal convergence orders, and CPU times for different
, where we take
,
, and
. In each row of the table, the errors and convergence orders change very little as
varies, so the method is stable for the coefficient
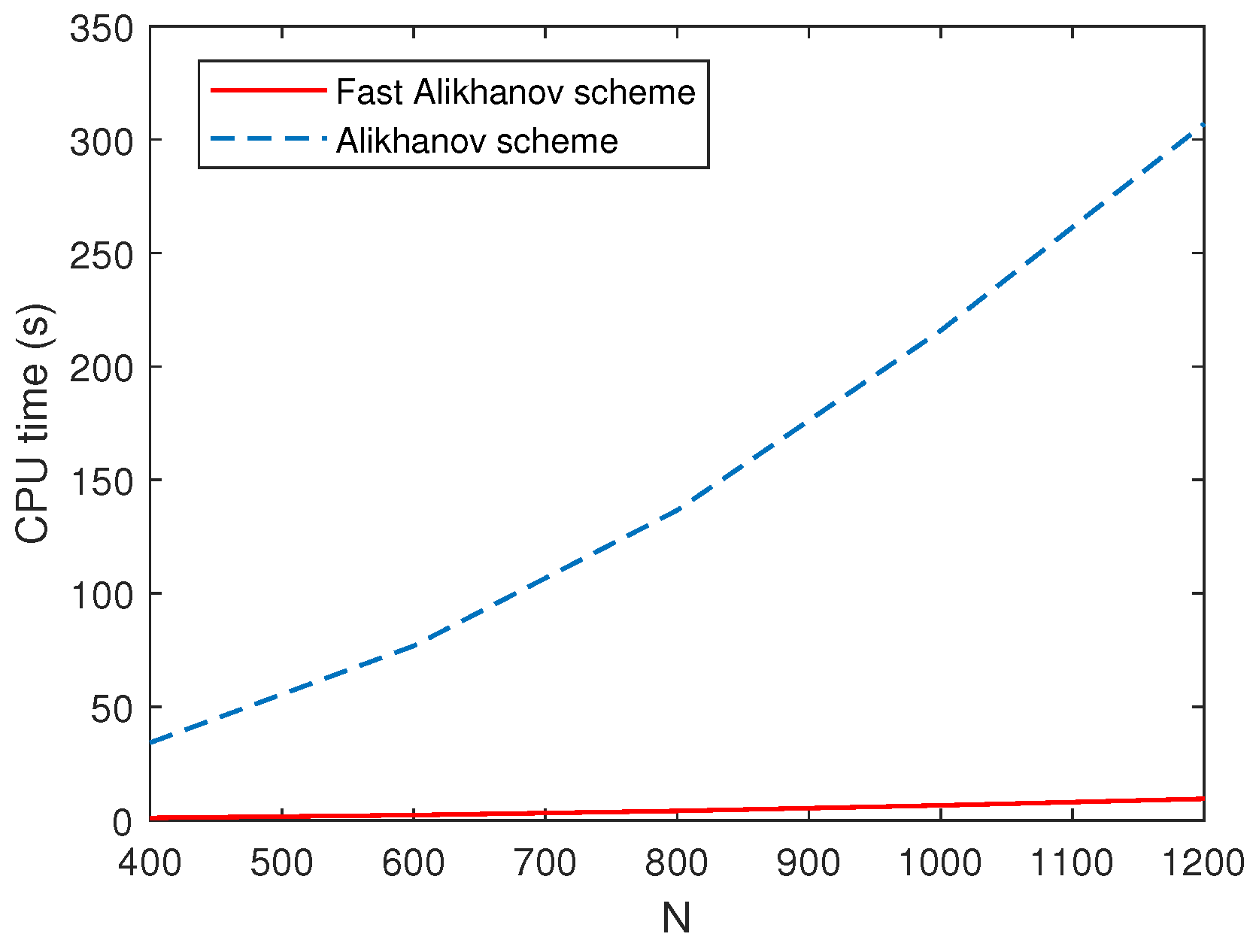
, as predicted by our theoretical analysis. In addition, in order to demonstrate more intuitively the speedup effect of the SOE approximation, taking
, and
, we plot the computation time curves of the two schemes for the
N increase, as shown in
Figure 3. It is clear that the fast Alikhanov scheme saves a lot of computational costs compared to the Alikhanov scheme.
Example 3. In this example, we consider problem (1) over domains and . The analytic solution is , such that the source term is as follows: Table 8 and
Table 9 display the temporal and spatial errors, spatial–temporal convergence orders, and CPU times for various
values. Furthermore, the results show that the proposed scheme can reach the second order of convergence in time and the fourth order of convergence in space. Next, we test the stability by fixing
,
,
, and
and selecting different
T values, which means the time-step sizes are different. The numerical results are listed in
Table 10, which shows that the fast Alikhanov scheme is stable and has a relaxed stability restriction. In
Table 11, we tested the errors for
by making
,
,
, and
, which also shows that the numerical scheme is stable when
.




{kind=link}
{kind=link}
{kind=link}