
Physics-Informed Fractional-Order Recurrent Neural Network for Fast Battery Degradation with Vehicle Charging Snippets

 ,
, 
 and
and
Abstract
1. Introduction
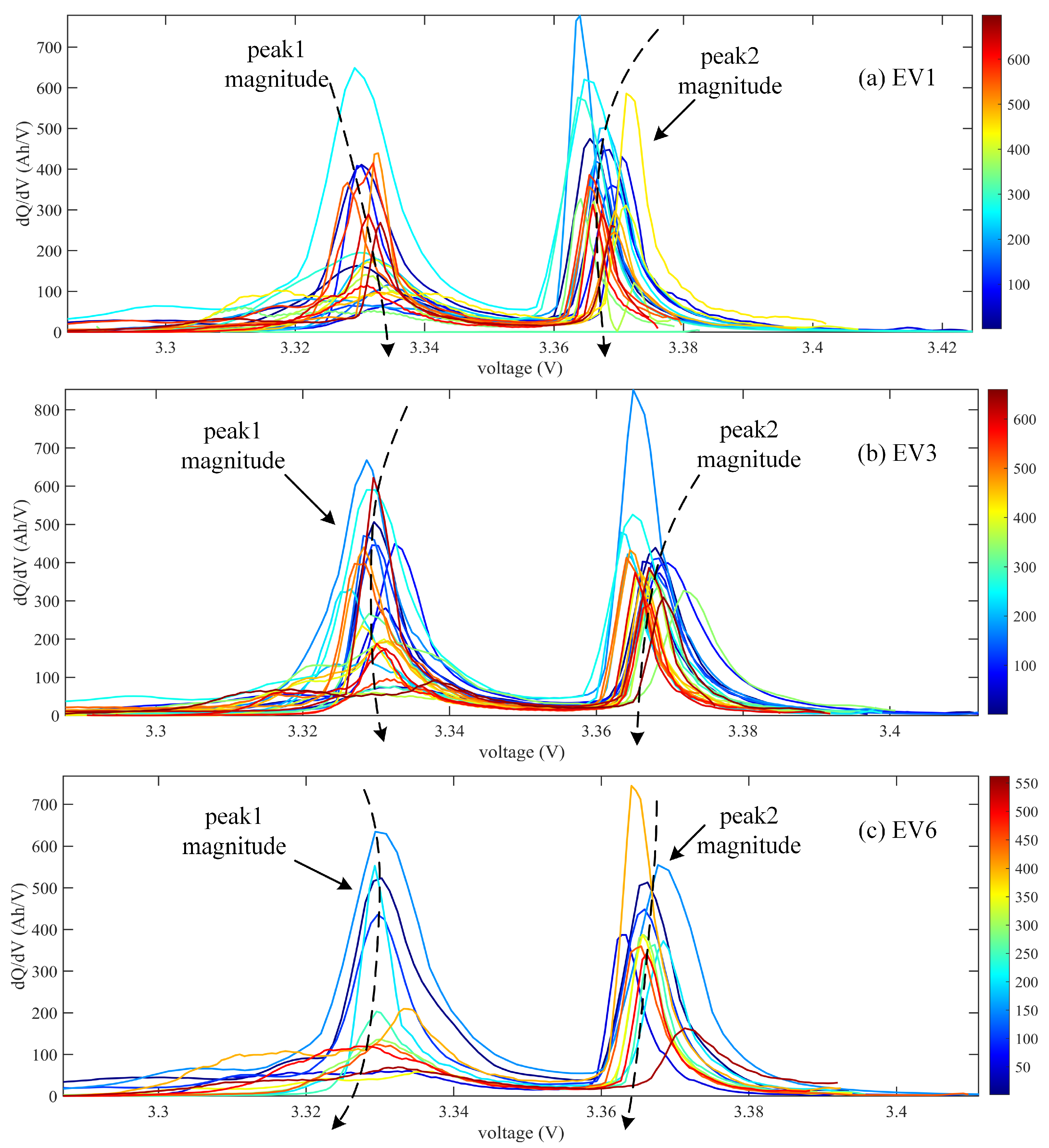
- A physics-informed recurrent neural network (PIRNN) with ICA and FOGD methods is proposed for capacity estimation in LIBs with fast degradation. The peak magnitudes of the IC curves are extracted as input characteristics for the neural network, and a fractional-order gradient is applied to the backpropagation process.
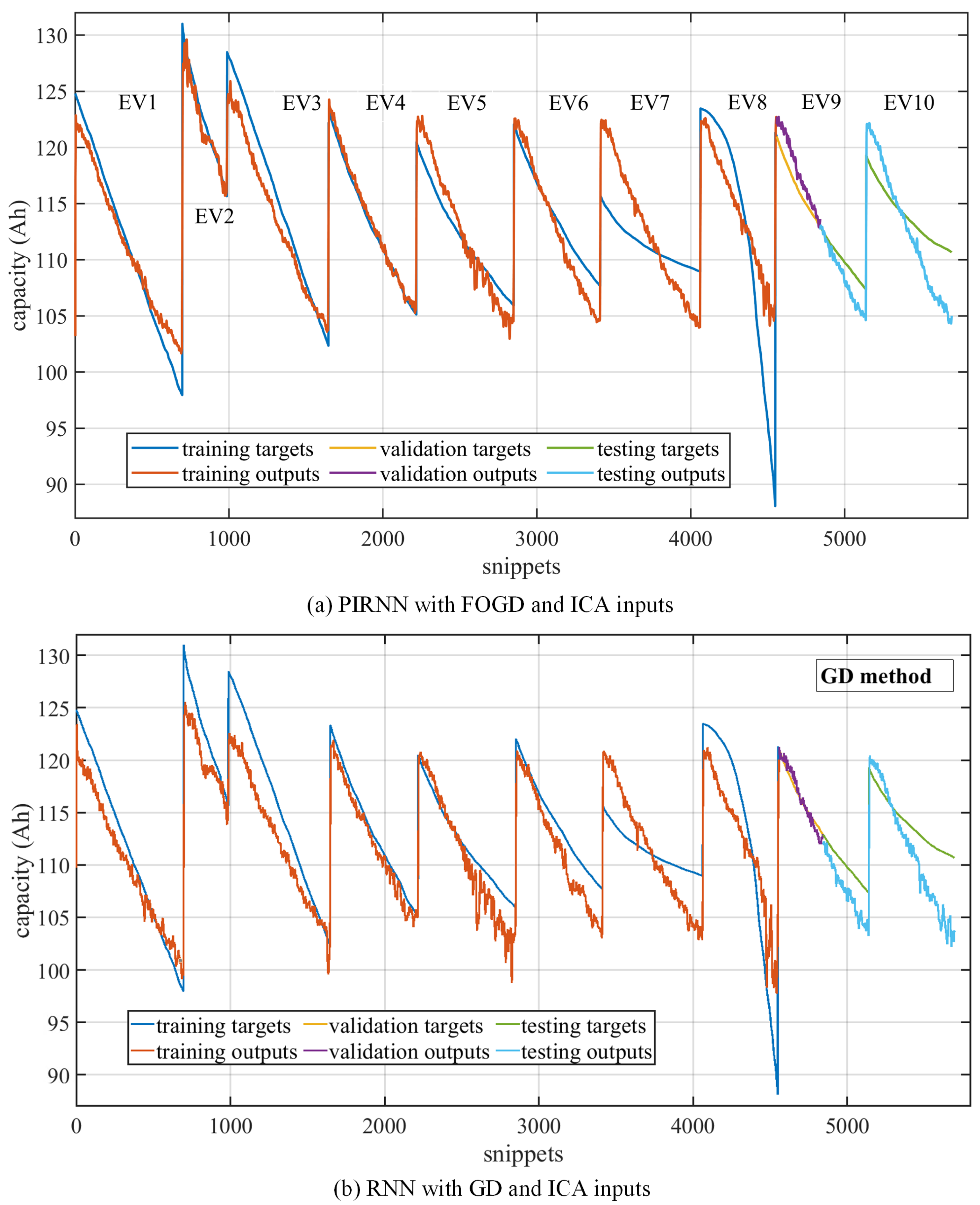
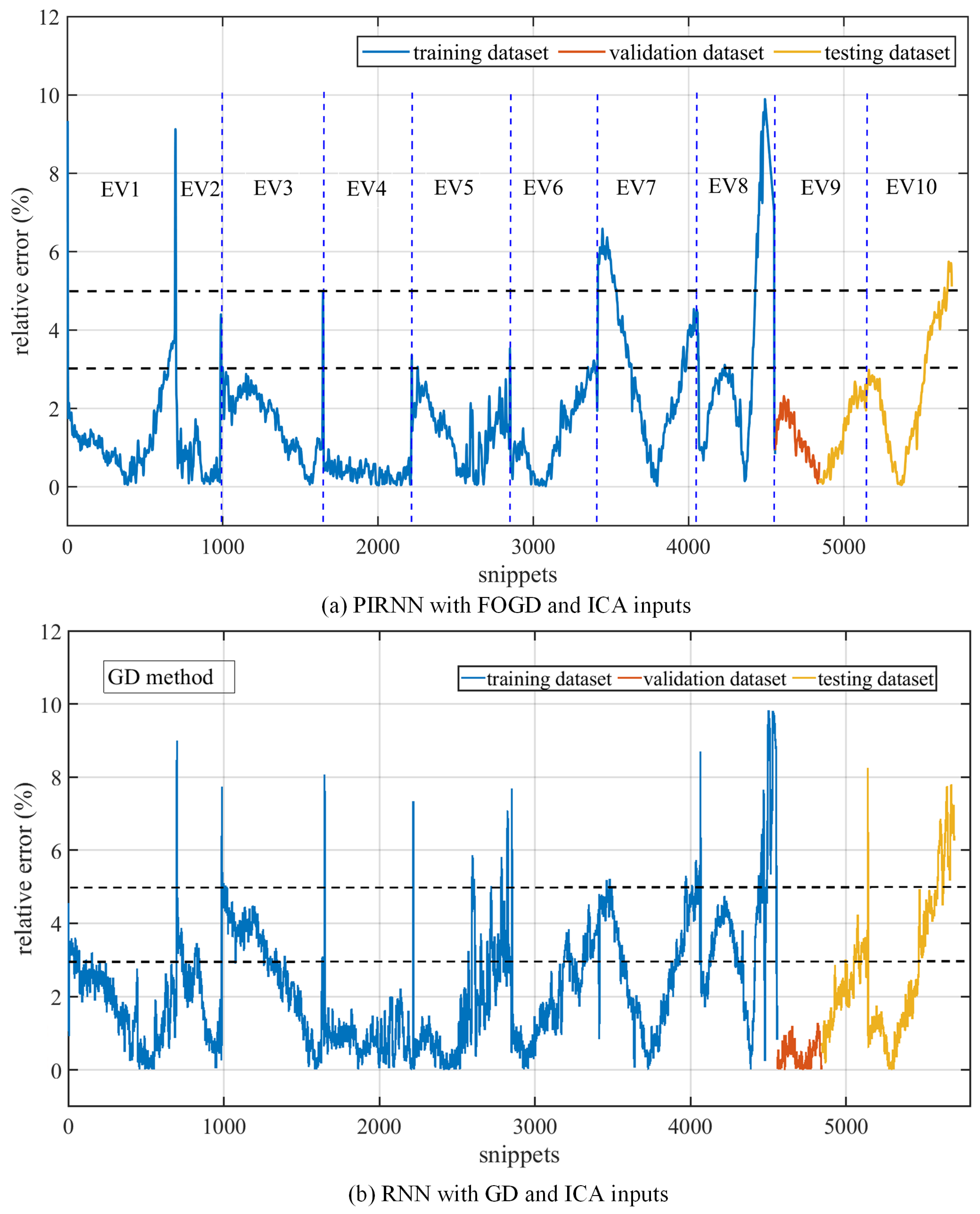
- The proposed PIRNN can learn the battery information of running EVs during training convergence and achieve stable capacity estimation accuracy (relative error < 3%) using a LiFeP battery dataset over three-quarters of a lifetime. This demonstrates that the proposed PIRNN can be applied to realistic batteries from running EVs and hold its accuracy.
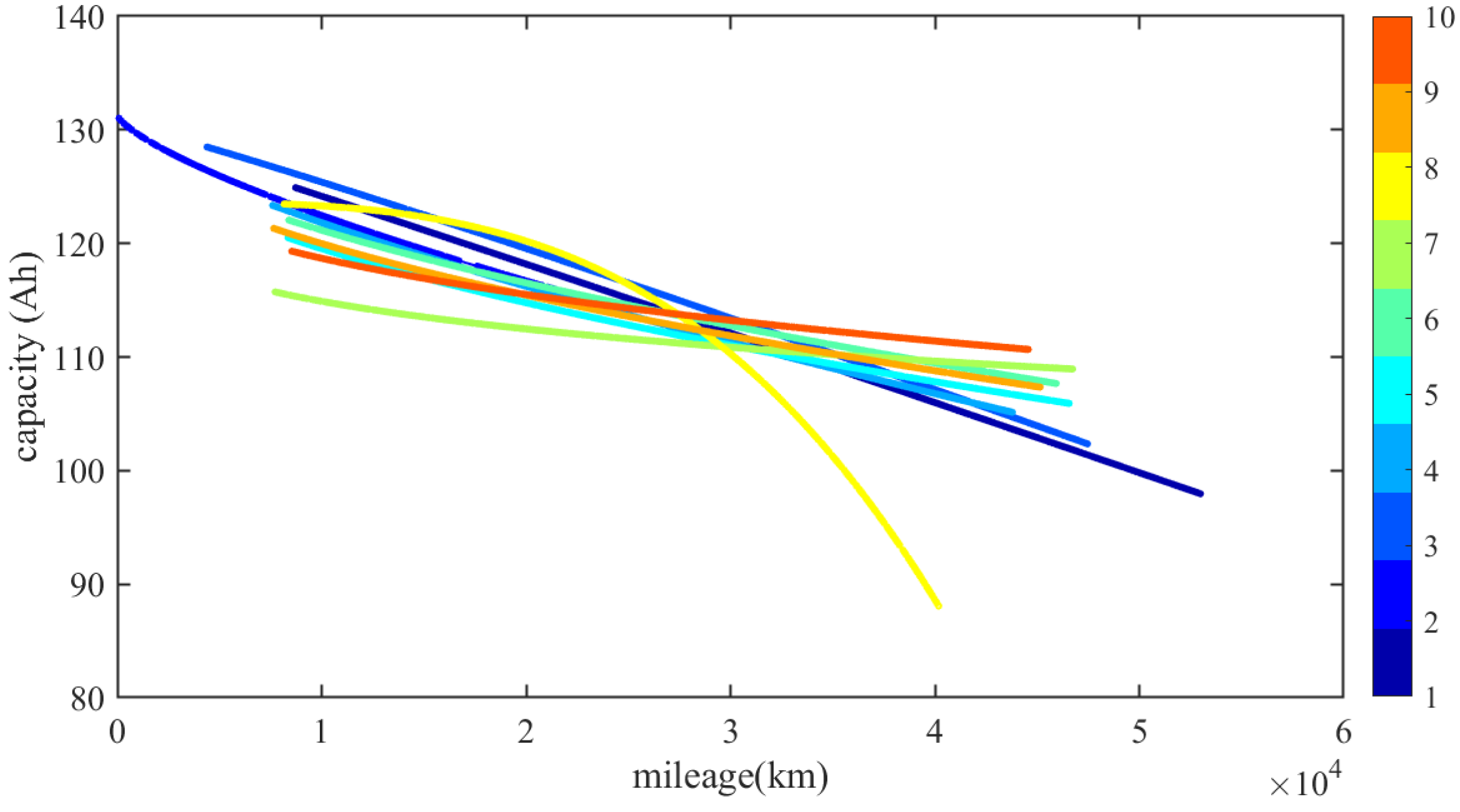
- A battery dataset with fast degradation is constructed based on ten running EVs covering the years 2018–2022 and with over a 40,000 km mileage. The dataset contains 5697 charging snippets and covers almost the whole battery lifetime, which can be the validation dataset for kinds of machine learning algorithms.
2. Preliminary
2.1. Fractional-Order Calculus and Derivative
2.2. Fractional-Order Gradient
3. Battery Dataset and Its Fractional-Order Information
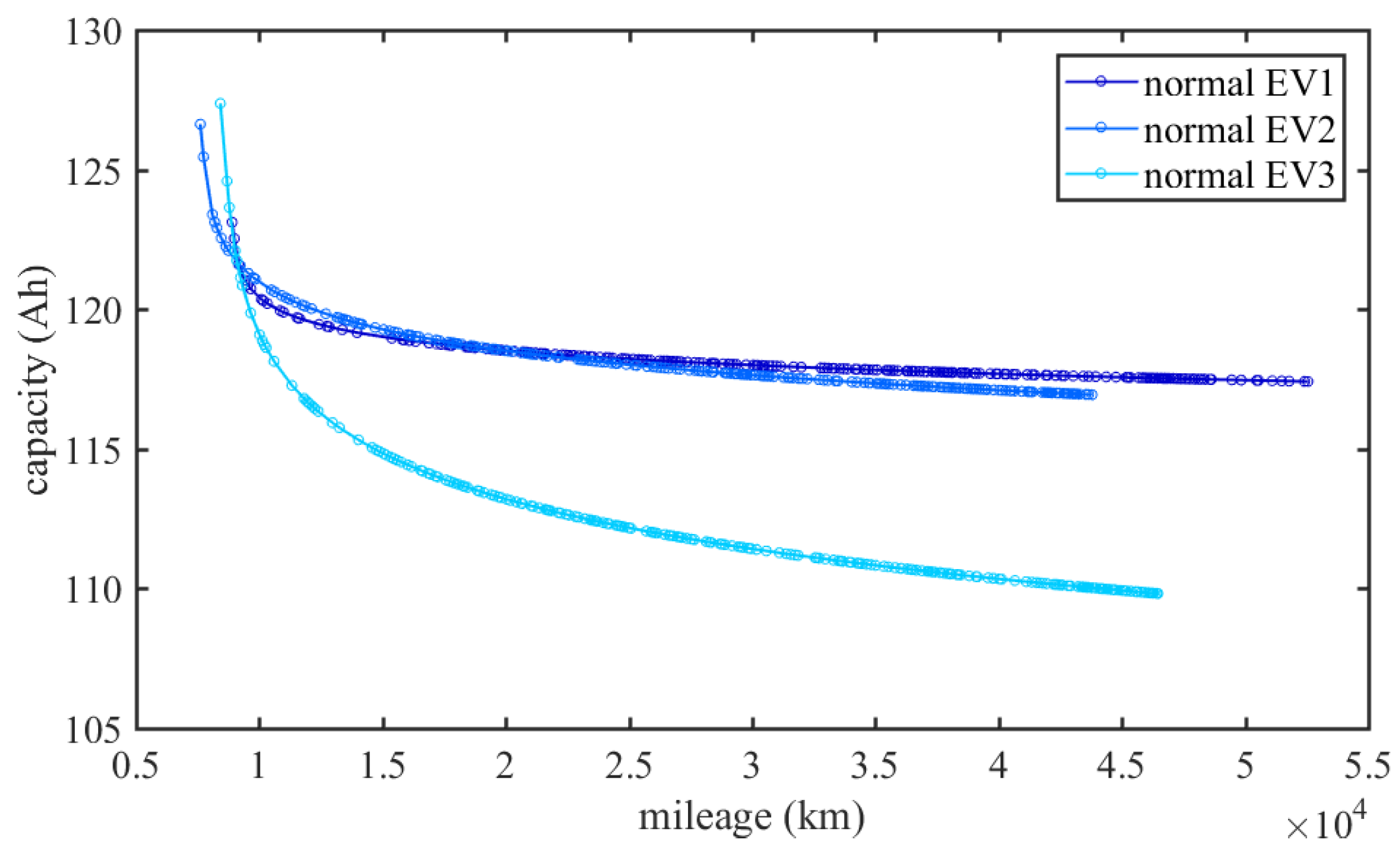
3.1. EV Dataset and Battery Degradation
3.1.1. Battery Capacity
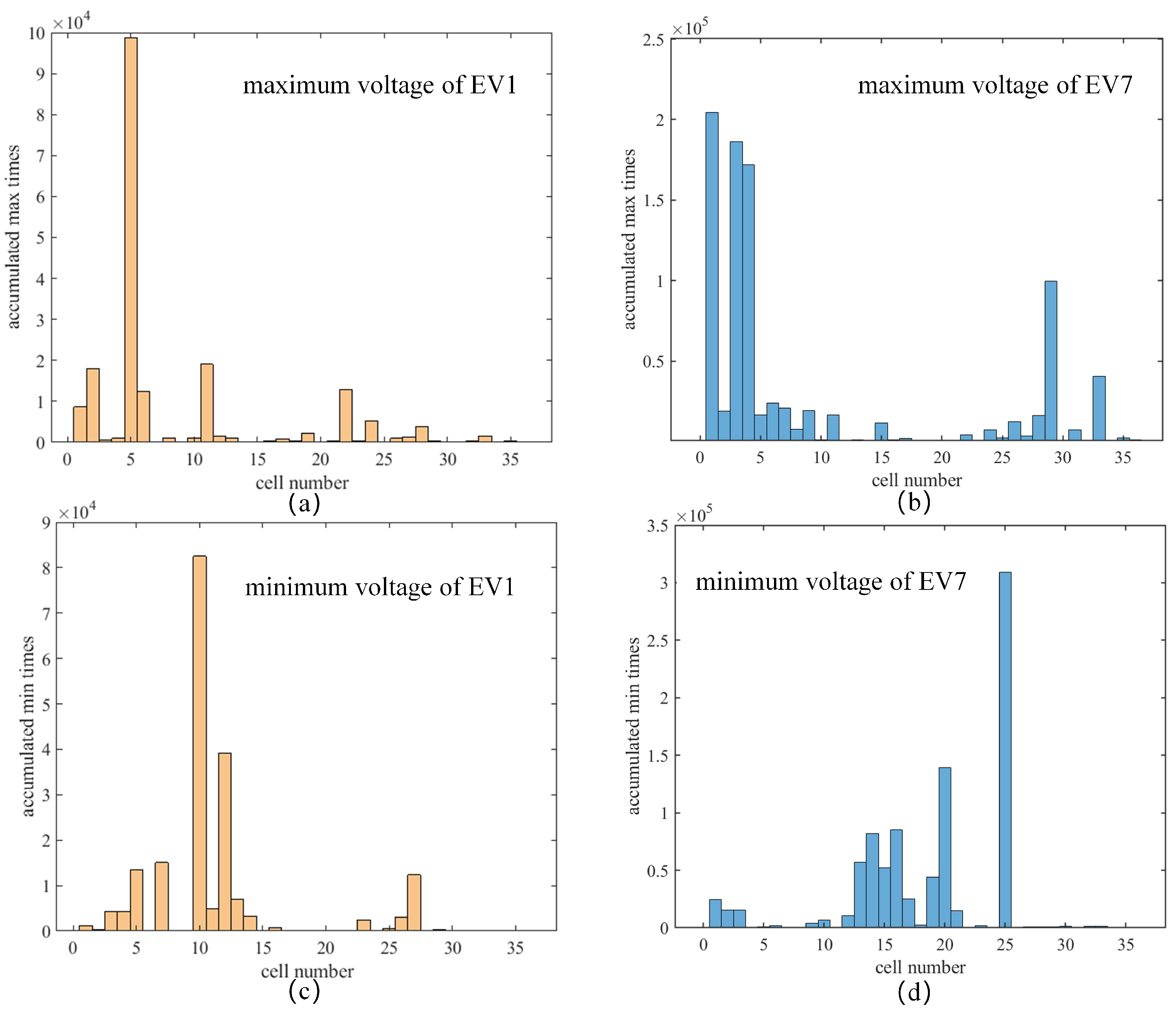
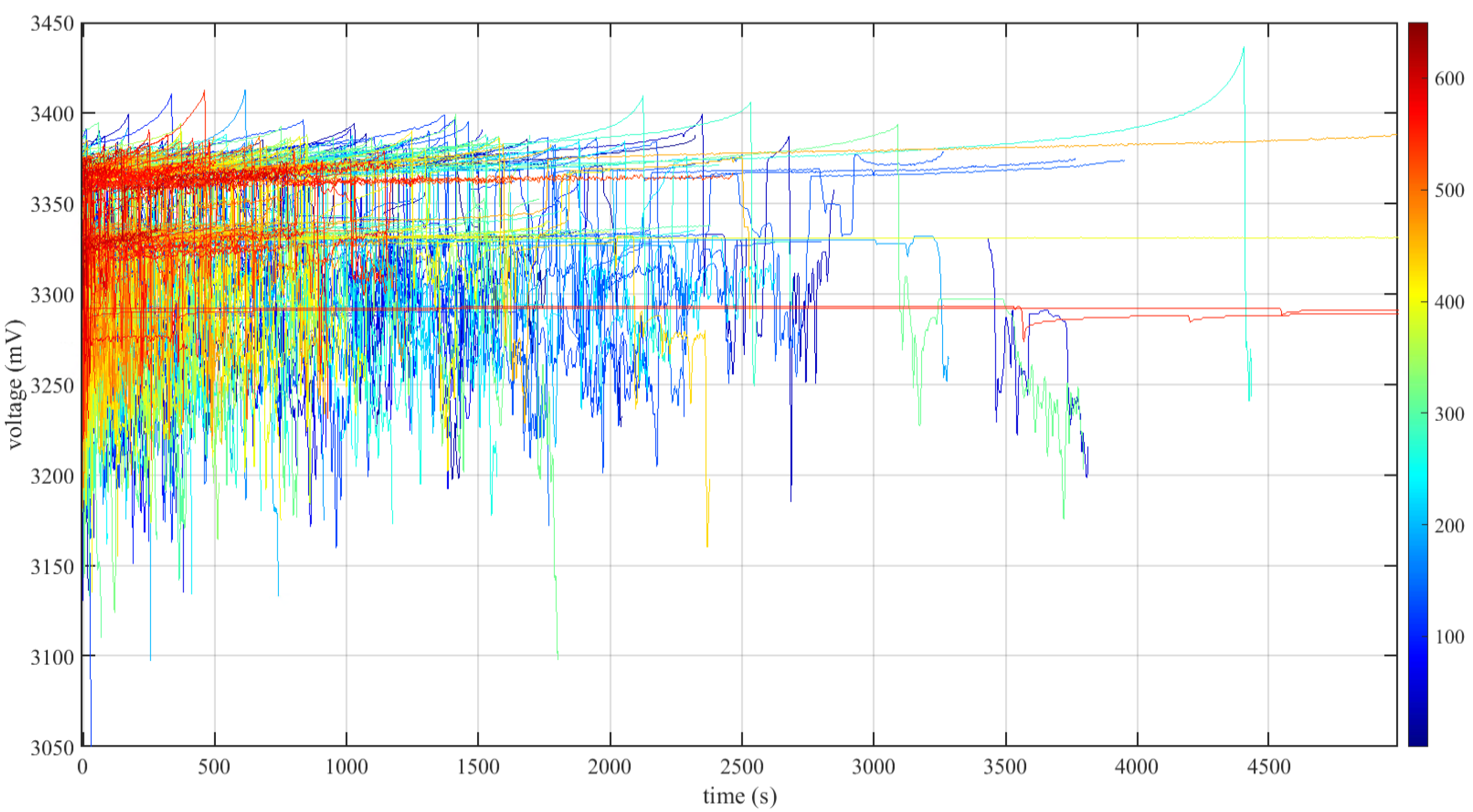
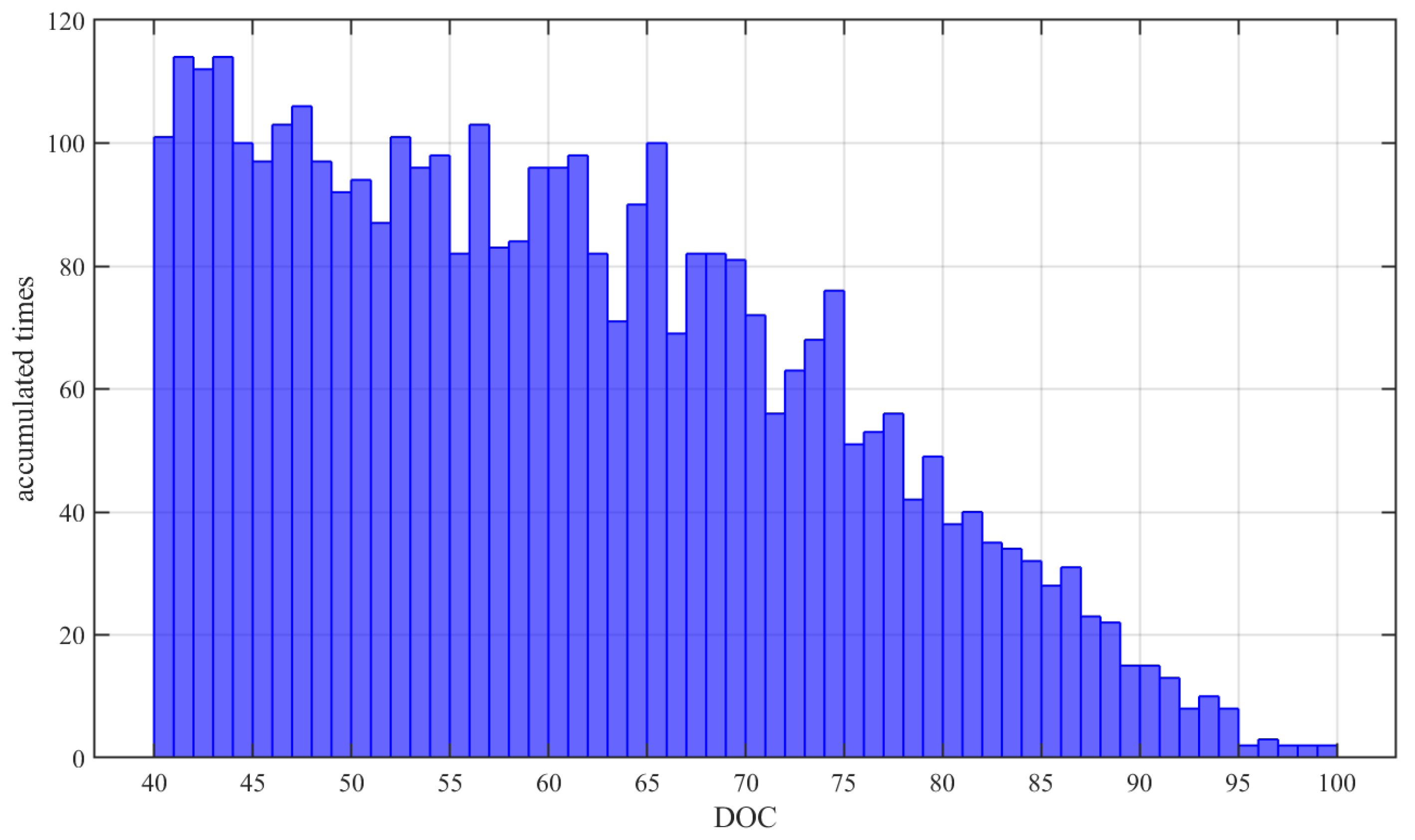
3.1.2. Battery Dataset with Vehicle Charging Snippets
3.2. Fractional-Order Information of Battery
3.2.1. Fractional-Order Equivalent Circuit Model
3.2.2. Incremental Capacity Analysis
4. Physics-Informed Fractional-Order Recurrent Neural Network for Battery Degradation
4.1. Physics-Informed Input with ICA Characteristics
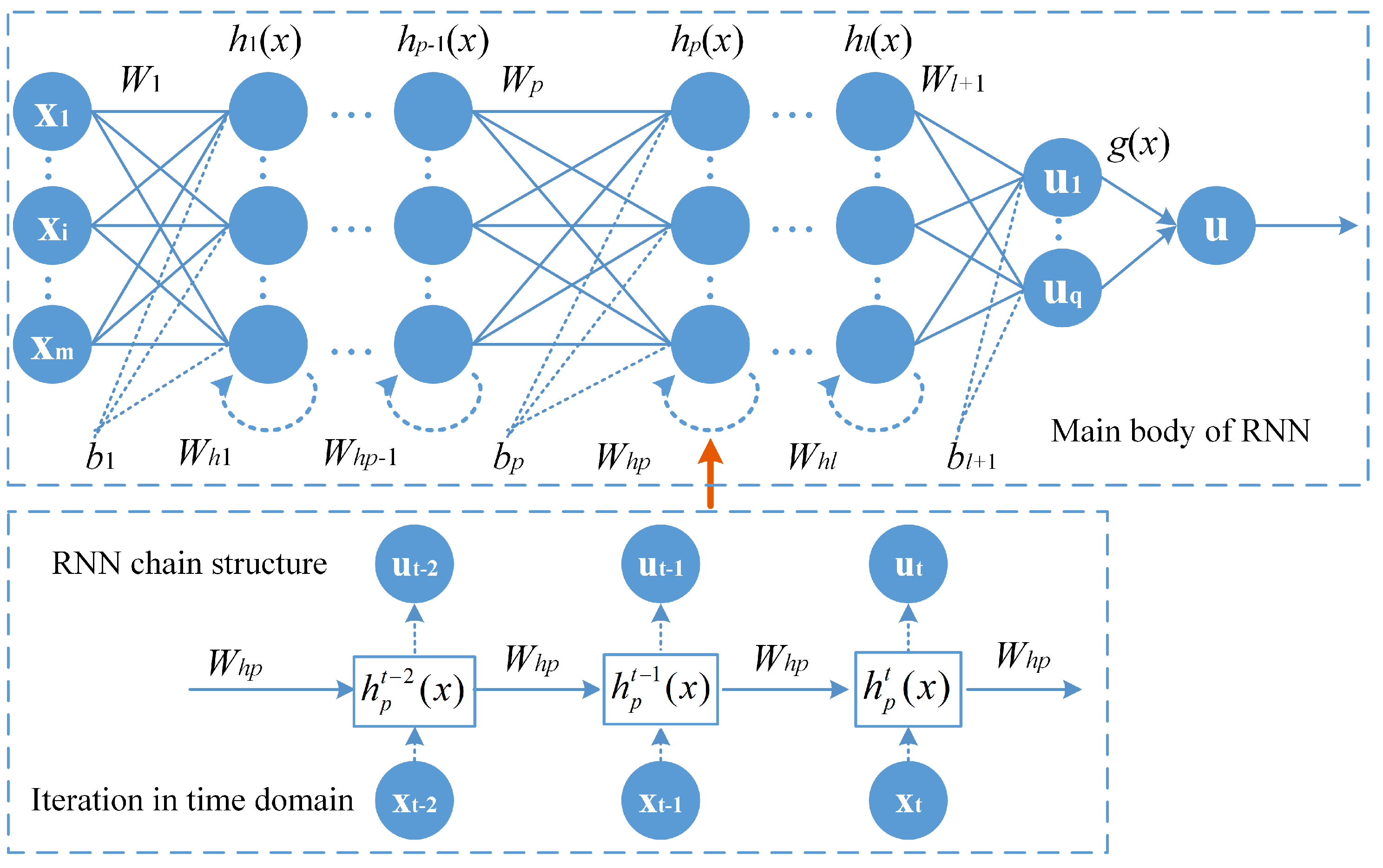
4.2. Physics-Informed Structure of RNN
4.3. Fractional-Order Gradient Descent Method
- Step 1: perform initialization, with , , the learning rate , the fractional order , and so on.
- Step 2: obtain the battery dataset, and then preprocess the data (including extraction of inputs such as ICA magnitude) and divide the battery data into training, validating, and testing data.
- Step 3: perform the feedforward process, in a discrete form, with data flows in the PIRNN from the input layer to output layer, and then calculate the MSE ().
- Step 4: perform the backpropagation process, starting from the output layer, to calculate the gradients between layers, and then update the weight and bias with (16).
- Step 5: Perform validation. Check if satisfies the target value or if the maximum epoch is arrived at. If so, go to step 6; if not, go to step 3 and .
- Step 6: If satisfies the target value of the loss function , the training process is completed, and capacity estimation and analysis should be conducted. Otherwise, if the maximum epoch is arrived at, adjust the parameters and redo the procedure.
5. Algorithm Verification and Experimental Results
5.1. Experimental Setup
5.2. Estimation Results for Battery Degradation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Roman, D.; Saxena, S.; Robu, V.; Pecht, M.; Flynn, D. Machine learning pipeline for battery state-of-health estimation. Nat. Mach. Intell. 2021, 3, 447–456. [Google Scholar] [CrossRef]
- Zhai, Q.; Jiang, H.; Long, N.; Kang, Q.; Meng, X.; Zhou, M.; Yan, L.; Ma, T. Machine learning for full lifecycle management of lithium-ion batteries. Renew. Sustain. Energy Rev. 2024, 202, 114647. [Google Scholar] [CrossRef]
- Lai, X.; Yi, W.; Cui, Y.; Qin, C.; Han, X.; Sun, T.; Zhou, L.; Zheng, Y. Capacity estimation of lithium-ion cells by combining model-based and data-driven methods based on a sequential extended Kalman filter. Energy 2021, 216, 119233. [Google Scholar] [CrossRef]
- Sulzer, V.; Mohtat, P.; Aitio, A.; Lee, S.; Yeh, Y.T.; Steinbacher, F.; Khan, M.U.; Lee, J.W.; Siegel, J.B.; Stefanopoulou, A.G.; et al. The challenge and opportunity of battery lifetime prediction from field data. Joule 2021, 5, 1934–1955. [Google Scholar] [CrossRef]
- Schindler, M.; Sturm, J.; Ludwig, S.; Schmitt, J.; Jossen, A. Evolution of initial cell-to-cell variations during a three-year production cycle. ETransportation 2021, 8, 100102. [Google Scholar] [CrossRef]
- Su, L.; Wu, M.; Li, Z.; Zhang, J. Cycle life prediction of lithium-ion batteries based on data-driven methods. ETransportation 2021, 10, 100137. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Chen, W.; Wang, L.; Lin, P.; Qu, C. Online accurate state of health estimation for battery systems on real-world electric vehicles with variable driving conditions considered. J. Clean. Prod. 2021, 294, 125814. [Google Scholar] [CrossRef]
- Yang, H.; Wang, P.; An, Y.; Shi, C.; Sun, X.; Wang, K.; Zhang, X.; Wei, T.; Ma, Y. Remaining useful life prediction based on denoising technique and deep neural network for lithium-ion capacitors. ETransportation 2020, 5, 100078. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.; Lipu, M.H.; Ker, P.J. State of charge estimation for lithium-ion batteries using model-based and data-driven methods: A review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Lipu, M.H.; Hannan, M.; Hussain, A.; Ayob, A.; Saad, M.H.; Karim, T.F.; How, D.N. Data-driven state of charge estimation of lithium-ion batteries: Algorithms, implementation factors, limitations and future trends. J. Clean. Prod. 2020, 277, 124110. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Li, M.; Chen, Z. A review of key issues for control and management in battery and ultra-capacitor hybrid energy storage systems. ETransportation 2020, 4, 100064. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Hong, J.; Hou, Y.; Yang, J.; Zhang, C.; Ma, S.; Zhang, X.; Yang, H.; Liang, F.; et al. Lithium plating detection of lithium-ion batteries based on the improved variance entropy algorithm. Energy 2024, 299, 131574. [Google Scholar] [CrossRef]
- Lipu, M.H.; Abd Rahman, M.; Mansor, M.; Rahman, T.; Ansari, S.; Fuad, A.M.; Hannan, M. Data driven health and life prognosis management of supercapacitor and lithium-ion battery storage systems: Developments, implementation aspects, limitations, and future directions. J. Energy Storage 2024, 98, 113172. [Google Scholar] [CrossRef]
- Amiri, M.N.; Haakansson, A.; Burheim, O.S.; Lamb, J.J. Lithium-ion battery digitalization: Combining physics-based models and machine learning. Renew. Sustain. Energy Rev. 2024, 200, 114577. [Google Scholar] [CrossRef]
- Zhao, J.; Feng, X.; Pang, Q.; Fowler, M.; Lian, Y.; Ouyang, M.; Burke, A.F. Battery safety: Machine learning-based prognostics. Prog. Energy Combust. Sci. 2024, 102, 101142. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Y.; Huang, Y.; Bhushan Gopaluni, R.; Cao, Y.; Heere, M.; Mühlbauer, M.J.; Mereacre, L.; Dai, H.; Liu, X.; et al. Data-driven capacity estimation of commercial lithium-ion batteries from voltage relaxation. Nat. Commun. 2022, 13, 1–10. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W.; Lu, J.; Yang, X.G. Deep neural network battery charging curve prediction using 30 points collected in 10 min. Joule 2021, 5, 1521–1534. [Google Scholar] [CrossRef]
- Ng, M.F.; Zhao, J.; Yan, Q.; Conduit, G.J.; Seh, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, H.; Zhang, Y.; Shen, S.; Shen, J.; Liu, Y. State of health estimation for lithium-ion batteries based on temperature prediction and gated recurrent unit neural network. J. Power Sources 2022, 521, 230892. [Google Scholar] [CrossRef]
- Jui, J.J.; Ahmad, M.A.; Molla, M.I.; Rashid, M.I.M. Optimal Energy Management Strategies for Hybrid Electric Vehicles: A Recent Survey of Machine Learning Approaches. J. Eng. Res. 2024, 12, 454–467. [Google Scholar] [CrossRef]
- Das, K.; Kumar, R.; Krishna, A. Analyzing electric vehicle battery health performance using supervised machine learning. Renew. Sustain. Energy Rev. 2024, 189, 113967. [Google Scholar] [CrossRef]
- El-Azab, H.A.I.; Swief, R.; El-Amary, N.H.; Temraz, H. Seasonal electric vehicle forecasting model based on machine learning and deep learning techniques. Energy AI 2023, 14, 100285. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Hussain, S.S.; Ustun, T.S.; Sarker, M.R.; Hannan, M.A.; Mohamed, R.; Ali, J.A.; Mekhilef, S.; Milad, A. Artificial neural networks based optimization techniques: A review. Electronics 2021, 10, 2689. [Google Scholar] [CrossRef]
- Stanley, K.O.; Clune, J.; Lehman, J.; Miikkulainen, R. Designing neural networks through neuroevolution. Nat. Mach. Intell. 2019, 1, 24–35. [Google Scholar] [CrossRef]
- Amari, S.i. Backpropagation and stochastic gradient descent method. Neurocomputing 1993, 5, 185–196. [Google Scholar] [CrossRef]
- Abdulkadirov, R.; Lyakhov, P.; Nagornov, N. Survey of optimization algorithms in modern neural networks. Mathematics 2023, 11, 2466. [Google Scholar] [CrossRef]
- Mok, R.; Ahmad, M.A. Smoothed functional algorithm with norm-limited update vector for identification of continuous-time fractional-order Hammerstein models. IETE J. Res. 2024, 70, 1814–1832. [Google Scholar] [CrossRef]
- Zhang, S.; Xie, L. Grafting constructive algorithm in feedforward neural network learning. Appl. Intell. 2023, 53, 11553–11570. [Google Scholar] [CrossRef]
- Ahmad, M.A.; Mustapha, N.M.Z.A.; Nasir, A.N.K.; Tumari, M.Z.M.; Ismail, R.M.T.R.; Ibrahim, Z. Using normalized simultaneous perturbation stochastic approximation for stable convergence in model-free control scheme. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 935–938. [Google Scholar]
- Liu, T.; Ghosal, P.; Balasubramanian, K.; Pillai, N. Towards understanding the dynamics of gaussian-stein variational gradient descent. In Proceedings of the 37th Conference on Neural Information Processing Systems (NeurIPS 2023), New Orleans, LO, USA, 10–16 December 2023; Volume 36. [Google Scholar]
- Feng, X.; Merla, Y.; Weng, C.; Ouyang, M.; He, X.; Liaw, B.Y.; Santhanagopalan, S.; Li, X.; Liu, P.; Lu, L.; et al. A reliable approach of differentiating discrete sampled-data for battery diagnosis. ETransportation 2020, 3, 100051. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.; Ringbeck, F.; Jöst, D.; Zhang, L.; Wei, Z.; Sauer, D.U. Physics-informed neural networks for electrode-level state estimation in lithium-ion batteries. J. Power Sources 2021, 506, 230034. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Lu, J.; Chen, C.; Shen, W. Battery state-of-charge estimation amid dynamic usage with physics-informed deep learning. Energy Storage Mater. 2022, 50, 718–729. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Liao, X. State-of-art survey of fractional order modeling and estimation methods for lithium-ion batteries. Fract. Calc. Appl. Anal. 2019, 22, 1449–1479. [Google Scholar] [CrossRef]
- Wang, Y.; Han, X.; Guo, D.; Lu, L.; Chen, Y.; Ouyang, M. Physics-informed recurrent neural networks with fractional-order constraints for the state estimation of lithium-ion batteries. Batteries 2022, 8, 148. [Google Scholar] [CrossRef]
- Wang, Y.; Han, X.; Lu, L.; Chen, Y.; Ouyang, M. Sensitivity of fractional-order Recurrent Neural Network with Encoded physics-informed Battery Knowledge. Fractal Fract. 2022, 6, 640. [Google Scholar] [CrossRef]
- Wang, F.; Zhai, Z.; Zhao, Z.; Di, Y.; Chen, X. Physics-informed neural network for lithium-ion battery degradation stable modeling and prognosis. Nat. Commun. 2024, 15, 4332. [Google Scholar] [CrossRef] [PubMed]
- Marc, W. Efficient Numerical Methods for Fractional Differential Equations and Their Analytical Background. Ph.D. Dissertation, Technischen Universit at Braunschweig, Braunschweig, Germany, 2005. [Google Scholar]
- Wang, B.; Liu, Z.; Li, S.E.; Moura, S.J.; Peng, H. State-of-charge estimation for lithium-ion batteries based on a nonlinear fractional model. IEEE Trans. Control Syst. Technol. 2016, 25, 3–11. [Google Scholar] [CrossRef]
- Zhang, Q.; Shang, Y.; Li, Y.; Cui, N.; Duan, B.; Zhang, C. A novel fractional variable-order equivalent circuit model and parameter identification of electric vehicle Li-ion batteries. ISA Trans. 2020, 97, 448–457. [Google Scholar] [CrossRef] [PubMed]
- Zou, C.; Hu, X.; Dey, S.; Zhang, L.; Tang, X. Nonlinear fractional-order estimator with guaranteed robustness and stability for lithium-ion batteries. IEEE Trans. Ind. Electron. 2017, 65, 5951–5961. [Google Scholar] [CrossRef]
- Nasser-Eddine, A.; Huard, B.; Gabano, J.D.; Poinot, T. A two steps method for electrochemical impedance modeling using fractional order system in time and frequency domains. Control Eng. Pract. 2019, 86, 96–104. [Google Scholar] [CrossRef]
- Wang, X.; Wei, X.; Zhu, J.; Dai, H.; Zheng, Y.; Xu, X.; Chen, Q. A review of modeling, acquisition, and application of lithium-ion battery impedance for onboard battery management. ETransportation 2021, 7, 100093. [Google Scholar] [CrossRef]
- Song, D.; Gao, Z.; Chai, H.; Jiao, Z. An adaptive fractional-order extended Kalman filtering approach for estimating state of charge of lithium-ion batteries. J. Energy Storage 2024, 85, 111089. [Google Scholar] [CrossRef]
- Zhang, J.; Xiao, B.; Niu, G.; Xie, X.; Wu, S. Joint estimation of state-of-charge and state-of-power for hybrid supercapacitors using fractional-order adaptive unscented Kalman filter. Energy 2024, 294, 130942. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Finite-time stability for fractional-order complex-valued neural networks with time delay. Appl. Math. Comput. 2020, 365, 124715. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Long, H.; Fan, X.; Cai, T. Multistability of fractional-order recurrent neural networks with discontinuous and nonmonotonic activation functions. IEEE Access 2019, 7, 116430–116437. [Google Scholar] [CrossRef]
- Khan, S.; Ahmad, J.; Naseem, I.; Moinuddin, M. A novel fractional gradient-based learning algorithm for recurrent neural networks. Circuits Syst. Signal Process. 2018, 37, 593–612. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Guo, D.; Yang, G.; Feng, X.; Han, X.; Lu, L.; Ouyang, M. Physics-based fractional-order model with simplified solid phase diffusion of lithium-ion battery. J. Energy Storage 2020, 30, 101404. [Google Scholar] [CrossRef]
- Guo, D.; Yang, G.; Han, X.; Feng, X.; Lu, L.; Ouyang, M. Parameter identification of fractional-order model with transfer learning for aging lithium-ion batteries. Int. J. Energy Res. 2021, 45, 12825–12837. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EV No. | Snippets Amount | Time Range | Mileage Range (km) | SOH Range (Ah) |
|---|---|---|---|---|
| EV1 | 698 | 18 September 2018–28 Febraury 2022 | 8730–52,992 | 124.9076–97.9608 |
| EV2 | 290 | 11 October 2018–29 March 2022 | 87–21,987 | 131.0177–115.6695 |
| EV3 | 660 | 22 September 2018–28 Febraury 2022 | 4400–47,461 | 128.4828–102.3552 |
| EV7 | 571 | 10 December 2018–31 January 2022 | 7605–43,792 | 123.3471–105.1326 |
| EV5 | 633 | 19 September 2018–16 September 2021 | 8355–46,569 | 120.4993–105.9154 |
| EV6 | 562 | 18 September 2018-2 March 2022 | 8395–45,933 | 122.0545–107.6695 |
| EV7 | 650 | 18 September 2018–1 March 2022 | 7725–46,737 | 115.7236–108.9408 |
| EV8 | 487 | 18 September 2018–31 January 2022 | 8165–40,186 | 123.4687–88.0738 |
| EV9 | 590 | 18 September 2018–20 July 2021 | 7660–45,148 | 121.3203–107.3435 |
| EV10 | 556 | 18 September 2018–20 December 2021 | 8538–44,569 | 119.3115–110.6705 |
| No. | 1 | 2 | 3 | 4 | 5 | 6 |
| Type | average current | start SOC | end SOC | DOC | start voltage | end voltage |
| No. | 7 | 8 | 9 | 10 | 11 | 12 |
| Type | mileage | Ah quantity | start temperature | end temperature | peak1 magnitude | peak2 magnitude |
| Name | Value | Name | Value |
|---|---|---|---|
| state delays in PIRNN | 1:2 | hidden layer size | 8 |
| performance function | MSE | maximum epoch | 3000 |
| train function | FOGD | train–validation–test | 0.8:0.05:0.15 |
| learning rate | 0.0001 | training goal | 1 |
| fractional order | 0.8 | validation times | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wei, M.; Dai, F.; Zou, D.; Lu, C.; Han, X.; Chen, Y.; Ji, C. Physics-Informed Fractional-Order Recurrent Neural Network for Fast Battery Degradation with Vehicle Charging Snippets. Fractal Fract. 2025, 9, 91. https://doi.org/10.3390/fractalfract9020091
Wang Y, Wei M, Dai F, Zou D, Lu C, Han X, Chen Y, Ji C. Physics-Informed Fractional-Order Recurrent Neural Network for Fast Battery Degradation with Vehicle Charging Snippets. Fractal and Fractional. 2025; 9(2):91. https://doi.org/10.3390/fractalfract9020091
Chicago/Turabian StyleWang, Yanan, Min Wei, Feng Dai, Daijiang Zou, Chen Lu, Xuebing Han, Yangquan Chen, and Changwei Ji. 2025. "Physics-Informed Fractional-Order Recurrent Neural Network for Fast Battery Degradation with Vehicle Charging Snippets" Fractal and Fractional 9, no. 2: 91. https://doi.org/10.3390/fractalfract9020091
APA StyleWang, Y., Wei, M., Dai, F., Zou, D., Lu, C., Han, X., Chen, Y., & Ji, C. (2025). Physics-Informed Fractional-Order Recurrent Neural Network for Fast Battery Degradation with Vehicle Charging Snippets. Fractal and Fractional, 9(2), 91. https://doi.org/10.3390/fractalfract9020091