Abstract
This study presents a comprehensive Lyapunov-based framework for analyzing partial practical stability in nonlinear tempered fractional-order systems (TFOS). We develop novel stability concepts including -practical uniform generalized Mittag–Leffler stability (-PUGMLS) and -practical uniform exponential stability (-PUES) with respect to system substates. Through carefully constructed Lyapunov functions, we establish sufficient conditions under which the system’s states converge to a predefined neighborhood of the origin. The theoretical framework provides Mittag–Leffler and exponential stability criteria for tempered fractional-order systems, extending classical stability theory to this important class of systems. Furthermore, we apply these stability results to design stabilizing feedback controllers for a specific class of triangular TFOS, demonstrating the practical utility of our theoretical developments. The efficacy of the proposed stability criteria and control strategy is validated through several illustrative examples, showing that system states converge appropriately under the derived conditions. This work contributes significantly to the stability theory of fractional-order systems and provides practical tools for controlling complex nonlinear systems in the tempered fractional calculus framework.
Keywords:
tempered fractional derivative; Lyapunov stability; practical stability; feedback control; Mittag-Leffler stability; exponential stability; nonlinear systems MSC:
34A34; 34A08; 65L20
1. Introduction
Stability theory is a cornerstone of system analysis and control [1,2,3,4,5]. The introduction of the Lyapunov Direct Method (LDM) marked a pivotal advancement, providing a powerful framework for analyzing the stability of nonlinear systems without requiring explicit solutions to their differential equations [6]. Among the types of stability studied is the so-called practical stability, which was examined in [7,8,9,10]. Recent advances in fractional calculus have further expanded the tools available for stability analysis, with significant contributions in various domains including gradient-based optimization algorithms for optimal control problems with general conformable fractional derivatives [11], practical observer design for nonlinear systems [12], finite time stability analysis for Hadamard fractional-order systems [13], and fault-tolerant control strategies for complex systems [14,15]. Fundamental mathematical contributions have also been made through extensions of classical lemmas such as Barbalat’s lemma for generalized conformable fractional integrals [16], alongside comprehensive frameworks for observer design in energy systems [17] and synchronization techniques for mutual coupled fractional-order systems [18]. Additionally, sophisticated approaches for fault estimation in nonlinear one-sided Lipschitz systems [19] and observer-based control methodologies for fractional-order systems [20] have significantly enriched the theoretical foundation for analyzing complex dynamical systems.
In recent years, the utilization of fractional calculus has become increasingly prevalent across various applications, leading to enhanced accuracy in numerous phenomena and models through its application [21,22,23,24,25]. Consequently, a substantial number of researchers have shown considerable interest in conducting advanced investigations into the stability analysis and control of systems involving fractional calculus [26,27,28,29,30]. Notably, the work in [29] established foundational results on the practical stability for a class of fractional-order systems.
The superior modeling ability of tempered fractional derivatives compared to standard fractional operators is the motivation for their study in the literature. Classical fractional derivatives with power-law kernels are able to well describe long-range memory and non-locality; however, they fail to capture exponentially decaying memory as opposed to algebraically decaying memory of a system. The addition of an exponential tempering factor to the fractional derivatives is used to address the weaknesses of an otherwise non-tempered classical model, and it thus provides a model which more accurately represents systems with finite memory or systems with faster-decaying influences than those in the classical power-law regime. Several studies in a variety of fields have realized the benefits of this balanced plan. Often, in the literature of optimization, such as in the Tempered Fractional Gradient Descent algorithm, the convergence behavior is favorable and enhanced stability is demonstrated in the case of stochastic perturbations [31]. In thermal physics, a tempered version of fractional models give a realistic description of the heat dynamics in heterogeneous materials [32,33], and in control theory, they allow the construction of observers with better performance on nonlinear dynamics [34]. The tempering parameter , therefore, provides not only more modeling flexibility but also an exponential decay that may enhance convergence and enhance stability of dynamical systems—properties that make tempered fractional calculus of particular interest in engineering where memory effects and fast stabilization are of great importance.
This paper makes a key contribution by analyzing the practical stability of TFOS for the general case of , a significant extension of the existing theory limited to in [29]. We demonstrate that a positive tempered parameter induces an exponential decay factor, leading to faster convergence and stronger stability guarantees. Our work also provides a distinct alternative to specialized approaches like the fuzzy-system method of [26]; instead of relying on LMIs, we develop a general Lyapunov-based framework that introduces novel stability concepts (-PUES, -PUGMLS) for a wider class of nonlinear TFOS. Collectively, these developments represent a substantial advancement of the theoretical foundations in this domain. Our contributions are not merely incremental but represent a substantial strengthening of the theoretical framework, as detailed below. The key points of our article can be summarized as follows:
- Stability Results: We establish results on practical Mittag–Leffler stability and practical exponential stability for TFOS.
- Controller Design: A feedback controller is proposed for a class of TFOS to enhance system performance.
- Conceptual Advancement: Unlike [27], which focuses on power systems and uses SOS optimization for polynomial controllers, our work develops a Lyapunov-based framework for partial practical stability in general nonlinear TFOS and introduces two new stability concepts (-PUGMLS and -PUES). Furthermore, we address triangular systems and provide constructive controller design without relying on SOS tools.
- Numerical Validation: Several numerical examples are provided to demonstrate the effectiveness of the proposed results.
We provide a side-by-side comparison with [27,29] in Table 1 to clarify how our contribution differs from prior studies.

Table 1.
Comparison between [27,29], and the present work.
Unlike [27,29], our work introduces new stability notions, addresses partial practical stability in the tempered case, and provides constructive controller design for triangular TFOS. The tempered parameter enables provably faster convergence, validated analytically and numerically.
2. Preliminaries
This section covers the basics of tempered fractional calculus.
Definition 1
([35]). Let , and . The tempered fractional integral of order ι of f is given by
Definition 2
([35]). Let and . The Caputo tempered fractional derivative of order ι for is given by
Definition 3
([36]). The Mittag–Leffler function is defined by
where , , .
If , we note .
Lemma 1
([37]). For , we have
Lemma 2
([38]). For , we have
Lemma 3
([35]). Let be an absolutely continuous function and with , then
Lemma 4
([35]). The solution of the following system
with , is given by
Lemma 5
([39]). The function is nonincreasing for all .
Definition 4
([4]). A function is said to be in the class if it is increasing and . In addition, if , then it is in the class .
Lemma 6
([4]). For , we have for all
Lemma 7
([40]). If , and , then and .
3. Main Results
Consider the following TFOS:
where , , , and is a smooth function such that the existence and uniqueness of solution is ensured (some results about the existence, uniqueness, and regularity of the solutions are given in [41,42]).
Definition 5.
The TFOS (5) is said to be
- (i)
- -practically uniformly exponentially stable with respect to (-PUES-), if for every , there is , , and such that for everywith as and there is with , for all .
- (ii)
- -practically uniformly generalized Mittag–Leffler stable with respect to (-PUGMLS-), if for every , there is , , , and such that for everywith , as and there is with , , for all .
Remark 1.
Note that -practical uniform generalized Mittag–Leffler stability guarantees faster convergence of solutions than -practical uniform exponential stability.
Theorem 1.
Let and . Suppose that for every , there is a function , a continuous function and , , , such that
- 1.
- 2.
with
- , and , with λ, .
- The function is bounded.
- as wherewith , whereand
Then, the system (5) is -PUGMLS-.
Proof.
Let
Using Lemma 4, we get
Therefore,
Then,
Remark 2.
While the authors of [29] established the practical stability of the system (5) for , we show that for , the convergence of solutions is significantly faster, a result facilitated by the exponential function.
Example 1.
Let the following TFOS
with .
Interpretation: Figure 1 demonstrates the -PUGMLS property of the system described in Example 1. The substate converges to a neighborhood of the origin with a radius of less than 0.01, confirming the theoretical prediction. The convergence follows a Mittag–Leffler pattern as expected for tempered fractional systems.
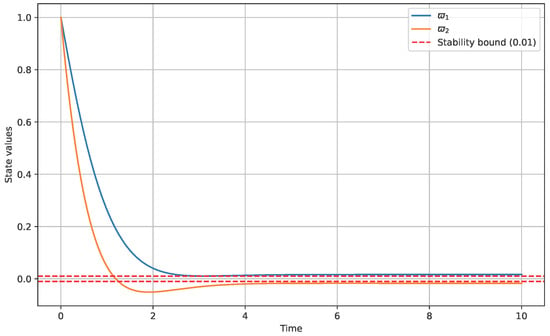
Figure 1.
State trajectories for Example 1 with , , and . The substate converges to the ball of radius 0.01 (dashed line).
Theorem 2.
Let and . Suppose that for every , there is a function , a continuous function , , , , , and , such that
- 1.
- 2.
with
- for all for some .
- , , with .
- The function is bounded.
- and as .
Then, the system (5) is -PUES-.
Proof.
It follows from (21) and (22) that
Let
Using Lemma 4, we get
Therefore,
Then,
It follows from Lemma 1 that there is such that
Therefore,
where
It follows from (21) that
Therefore,
where
Using Lemma 7, we get
with .
Hence,
Thus, the system (5) is -PUES-. □
Remark 3.
In contrast to the work presented in [29] for , the result given in Theorem 2 establishes the practical stability for the case , which is achieved due to the presence of an exponential function.
Example 2.
Let the following TFOS
with .
For , we have for all .
Using Lemma 2, we get
It follows from Lemma 1 that there is such that
Thus, all assumptions of the previous theorem are satisfied, and then the TFOS (19) is -PUES-.
Interpretation: The simulation results for Example 2, shown in Figure 2, confirm the -PUES property. The substate converges exponentially to the ball of radius 0.01.
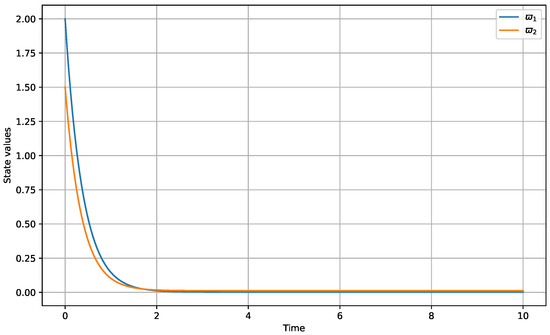
Figure 2.
State trajectories for Example 2 with , , and . The substate shows exponential convergence to the stability ball.
4. Practical Stability for a Class of Triangular Systems
Let us consider the following TFOS:
where
Let us consider the following assumption:
For every , , and , ,
such that is a nonnegative continuous function, , , and as .
Theorem 3.
Under assumption , the system (36) and (37) with the feedback law is -PUGMLS- for some if there exist , , , and such that
with and the function
is bounded.
Proof.
We have from (39)
Let we have
Therefore,
Since and , then there is such that for each , we get
Let and .
Example 3.
Let the following TFOS
with .
This system has the same form of system (36) and (37) with
and
The perturbed term satisfies with , , , and .
The condition (39) is satisfied for , , and
Then, by using the previous theorem, we get the -PUGMLS- for TFOS (44).
Interpretation: The proposed feedback controller effectively stabilizes the triangular system described in Example 3. As shown in Figure 3, the substate converges to the desired ball of radius 0.01 despite the presence of nonlinear perturbations. Figure 4 shows the control effort, which is reasonable and converges to zero as the system stabilizes. This demonstrates the practical applicability of the theoretical controller design methodology.
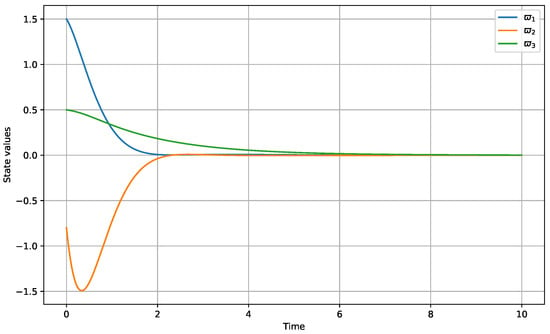
Figure 3.
Closed-loop system trajectories for Example 3 with , , and . The controller successfully stabilizes the substate .
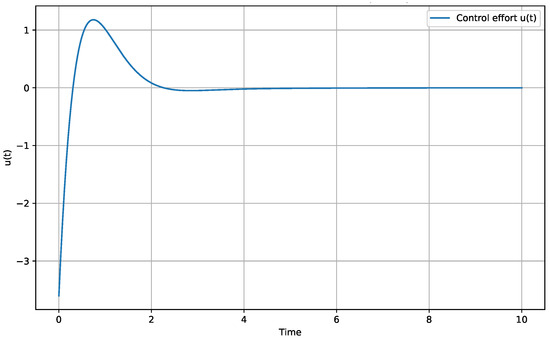
Figure 4.
Control effort for the stabilization of the Example 3 system.
Theorem 4.
Under assumption , the system (36) and (37) with the feedback law is -PUES- for some if there exist , , , , and such that
and the function
is bounded.
Proof.
Let . Similar to the proof of Theorem 3, we get
Since and , then there is such that for each , we get
Let and .
Example 4.
Let the following TFOS
with .
This system has the same form of (36) and (37) with
and
The perturbed term satisfies with , , , and .
The condition (45) is satisfied for , , , and
Then, by using the previous Theorem, we get the -PUES- for TFOS (49).
Interpretation: The simulation results for Example 4, presented in Figure 5 and Figure 6, validate the -PUES property for the controlled system. The substate converges exponentially to the ball of radius 0.01. Figure 6 demonstrates the system’s robustness to variations in the parameter , with smaller values of leading to better convergence properties (smaller ultimate bounds), as predicted by the theory.
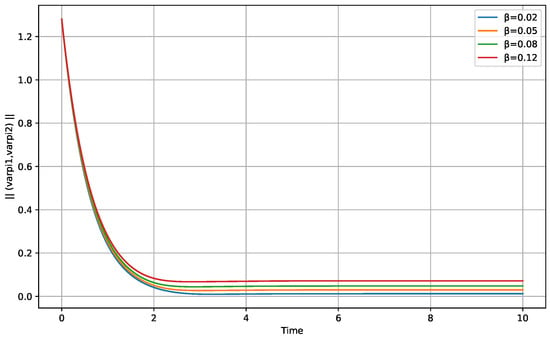
Figure 5.
State trajectories for Example 4 with , , and . The controlled substate shows practical uniform exponential stability.
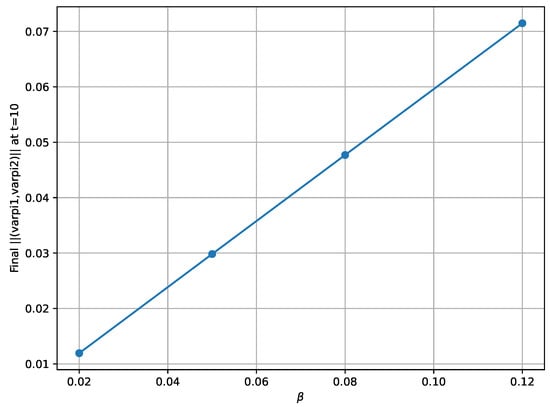
Figure 6.
Robustness analysis showing system performance under different values.
5. Conclusions
This paper has established a comprehensive Lyapunov-based framework for analyzing partial practical stability in nonlinear TFOS. We have introduced and rigorously analyzed two novel stability concepts, -PUGMLS and -PUES, with respect to system substates. Through the development of appropriate Lyapunov functions and inequality techniques, we derived sufficient conditions that guarantee the convergence of system states to a predefined neighborhood of the origin.
The theoretical contributions include the extension of classical stability theory to tempered fractional calculus systems, providing both Mittag–Leffler and exponential stability criteria that account for the tempered parameter’s influence on system behavior. Furthermore, we successfully applied these stability results to design effective feedback controllers for a class of triangular TFOS, demonstrating the practical applicability of our theoretical developments. The presented examples have validated the effectiveness of our stability criteria and control strategies, showing consistent convergence behavior under various system configurations and parameter variations. This work not only advances the theoretical understanding of stability in tempered fractional-order systems but also provides practical tools for controlling complex nonlinear systems in engineering applications.
Future research will focus on several promising extensions of this work. First, the development of adaptive control strategies is a natural next step, which would allow the controller parameters to self-tune in response to unknown system uncertainties or time-varying perturbations, enhancing the robustness of the proposed framework. Second, the design of state observers for TFOS is critical for practical implementations, where not all system states are measurable; extending our results to output-feedback control using observer-based designs would significantly broaden the applicability of the method. Furthermore, exploring these stability and control techniques with new fractional operators, such as the ones containing non-singular kernels or variable orders, could yield even more accurate modeling and control capabilities. Finally, applying this theoretical framework to complex real-world systems in fields such as power systems, mechanical engineering, and biomedical engineering will be a key direction, leveraging the enhanced accuracy that tempered fractional models provide for systems with memory and anomalous diffusion phenomena.
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP2503).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Dorgham, A.; Hammami, M.A. Practical tracking control of a class of uncertain nonlinear systems and unknown output function. Int. J. Adapt. Control Signal Process. 2023, 37, 2434–2450. [Google Scholar] [CrossRef]
- Damak, H.; Hammami, M.A.; Maaloul, K. Observers Based Control for Stabilization of Non-autonomous Evolution Equations in Banach Spaces. Complex Anal. Oper. Theory 2023, 17, 65. [Google Scholar] [CrossRef]
- Ben Makhlouf, A. On the Stability of Caputo Fractional-Order Systems: A Survey. In Fractional Order Systems-Control Theory and Applications: Fundamentals and Applications; Springer International Publishing: Cham, Switzerland, 2021; pp. 1–8. [Google Scholar]
- Sontag, E.D. Smooth stabilization implies coprime factorization. IEEE Trans. Autom. Control 1989, 34, 435–443. [Google Scholar] [CrossRef]
- El-Borai, M.M.; Moustafa, O.L.; Ahmed, H.M. Asymptotic stability of some stochastic evolution equations. Appl. Math. Comput. 2003, 144, 273–286. [Google Scholar] [CrossRef]
- Khandani, K.; Majd, M.J.; Tahmasebi, M. Integral sliding mode control for robust stabilisation of uncertain stochastic time-delay systems driven by fractional Brownian motion. Int. J. Syst. Sci. 2017, 48, 828–837. [Google Scholar] [CrossRef]
- Benabdallah, A.; Ellouze, I.; Hammami, M.A. Practical exponential stability of perturbed triangular systems and a separation principle. Asian J. Control 2011, 13, 445–448. [Google Scholar] [CrossRef]
- Ghanmi, B. On the Practical h-stability of Nonlinear Systems of Differential Equations. J. Dyn. Control Syst. 2019, 25, 691–713. [Google Scholar] [CrossRef]
- Hamzaoui, A.; Taieb, N.H.; Hammami, M.A. Practical partial stability of time-varying systems. Discret. Contin. Dyn.-Syst.-B 2022, 7, 3585–3603. [Google Scholar] [CrossRef]
- Ghanmi, B. Stability of impulsive systems depending on a parameter. Math. Methods Appl. Sci. 2016, 39, 2626–2646. [Google Scholar] [CrossRef]
- Alaia, E.B.; Dhahri, S.; Naifar, O. A Gradient-Based Optimization Algorithm for Optimal Control Problems with General Conformable Fractional Derivatives. IEEE Access 2025, 2025, 3595958. [Google Scholar] [CrossRef]
- Naifar, O. Practical Observer Design for Nonlinear Systems using Caputo Fractional Derivative with Respect to Another Function. In Proceedings of the IEEE 22nd International Multi-Conference on Systems, Signals and Devices (SSD), Monastir, Tunisia, 17–20 February 2025; pp. 411–418. [Google Scholar]
- Naifar, O.; Makhlouf, A.B.; Mchiri, L.; Rhaima, M. Finite Time Stability for Hadamard Fractional-Order Systems. Ain Shams Eng. J. 2025, 16, 103263. [Google Scholar] [CrossRef]
- Dhahri, S.; Naifar, O. Fault-Tolerant Tracking Control for Linear Parameter-Varying Systems under Actuator and Sensor Faults. Mathematics 2023, 11, 4738. [Google Scholar] [CrossRef]
- Dhahri, S.; Naifar, O. Robust Fault Estimation and Tolerant Control for Uncertain Takagi-Sugeno Fuzzy Systems. Symmetry 2023, 15, 1894. [Google Scholar] [CrossRef]
- Ben Makhlouf, A.; Naifar, O. On the Barbalat Lemma Extension for the Generalized Conformable Fractional Integrals: Application to Adaptive Observer Design. Asian J. Control 2023, 25, 563–569. [Google Scholar]
- Naifar, O.; Boukettaya, G. On Observer Design of Systems Based on Renewable Energy. In Advances in Observer Design and Observation for Nonlinear Systems: Fundamentals and Applications; Springer: Cham, Switzerland, 2022; pp. 135–176. [Google Scholar]
- Naifar, O.; Makhlouf, A.B. Synchronization of Mutual Coupled Fractional Order One-Sided Lipschitz Systems. Integration 2021, 80, 41–45. [Google Scholar] [CrossRef]
- Naifar, O.; Jmal, A.; Ben Makhlouf, A.; Derbel, N.; Hammami, M.A. Fault Estimation for Nonlinear One-Sided Lipschitz Systems. In Fractional Order Systems—Control Theory and Applications: Fundamentals and Applications; Springer: Cham, Switzerland, 2021; pp. 95–122. [Google Scholar]
- Naifar, O.; Jmal, A.; Ben Makhlouf, A.; Derbel, N.; Hammami, M.A. Observer-Based Control for Fractional-Order Systems. In Fractional Order Systems—Control Theory and Applications: Fundamentals and Applications; Springer: Cham, Switzerland, 2021; pp. 75–93. [Google Scholar]
- Engheta, N. On fractional calculus and fractional multipoles in electromagnetism. IEEE Trans. Antennas Propag. 1996, 44, 554–566. [Google Scholar] [CrossRef]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Sadek, L.; Sadek, O.; Alaoui, H.T.; Abdo, M.S.; Shah, K.; Abdeljawad, T. Fractional order modeling of predicting covid-19 with isolation and vaccination strategies in Morocco. CMES-Comput. Model. Eng. Sci 2023, 136, 1931–1950. [Google Scholar] [CrossRef]
- Erturk, V.S.; Kumar, P. Solution of a COVID-19 model via new generalized Caputo-type fractional derivatives. Chaos Solitons Fractals 2020, 139, 110280. [Google Scholar] [CrossRef]
- Ben Makhlouf, A. Superstability of higher-order fractional differential equations. Ann. Univ. Craiova-Math. Comput. Sci. Ser. 2022, 49, 11–14. [Google Scholar]
- Rguigui, H.; Elghribi, M. Practical stabilization for a class of tempered fractional-order nonlinear fuzzy systems. Asian J. Control 2025. [Google Scholar] [CrossRef]
- Gassara, H.; Kharrat, D.; Ben Makhlouf, A.; Mchiri, L.; Rhaima, M. SOS Approach for Practical Stabilization of Tempered Fractional-Order Power System. Mathematics 2023, 11, 3024. [Google Scholar] [CrossRef]
- Ben Makhlouf, A. Stability with respect to part of the variables of nonlinear Caputo fractional differential equations. Math. Commun. 2018, 23, 119–126. [Google Scholar]
- Ben Makhlouf, A. Partial practical stability for fractional-order nonlinear systems. Math. Methods Appl. Sci. 2022, 45, 5135–5148. [Google Scholar] [CrossRef]
- Ben Makhlouf, A. A novel finite time stability analysis of nonlinear fractional-order time delay systems: A fixed point approach. Asian J. Control 2022, 24, 3580–3587. [Google Scholar] [CrossRef]
- Naifar, O. Tempered Fractional Gradient Descent: Theory, Algorithms, and Robust Learning Applications. Neural Netw. 2025, 193, 108005. [Google Scholar] [CrossRef] [PubMed]
- Abouelregal, A.E.; Alhassan, Y.; Alsaeed, S.S.; Elzayady, M.E. Tempered Fractional Thermal Conduction Model for Magnetoelastic Solids with Spherical Holes under Time-Dependent Laser Pulse Heating. Arch. Appl. Mech. 2025, 95, 27. [Google Scholar] [CrossRef]
- Abouelregal, A.E.; Civalek, Ö; Akgöz, B.; Foul, A.; Askar, S.S. Analysis of Thermoelastic Behavior of Porous Cylinders with Voids via a Nonlocal Space-Time Elastic Approach and Caputo-Tempered Fractional Heat Conduction. Mech. Time-Depend. Mater. 2025, 29, 1–32. [Google Scholar] [CrossRef]
- Alawad, M.A.; Louhichi, B. Innovative Observer Design for Nonlinear Tempered Fractional-Order Systems. Asian J. Control 2025. [Google Scholar] [CrossRef]
- Deng, J.; Ma, W.; Deng, K.; Li, Y. Tempered Mittag-Leffler Stability of Tempered Fractional Dynamical Systems. Math. Probl. Eng. 2020, 2020, 7962542. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Erdelyi, A. Higher Transcendental Functions; McGraw-Hill: New-York, NY, USA, 1953; Volume III. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Miller, K.; Samko, S. A Note on the Complete Monotonicity of the Generalized Mittag-Leffler Function. Real Anal. Exch. 1999, 23, 753–756. [Google Scholar] [CrossRef]
- Kuczma, M. An Introduction to the Theory of Functional Equations and Inequalities: Cauchy’s Equation and Jensen’s Inequality; Birkhauser: Basel, Switzerland, 2009. [Google Scholar]
- Li, C.; Deng, W.; Zhao, L. Well-posedness and numerical algorithm for the tempered fractional differential equations. Discret. Contin. Dyn. Syst. Ser. B 2019, 24, 1989–2015. [Google Scholar] [CrossRef]
- Miller, R.K.; Feldstein, A. Smoothness of solutions of Volterra integral equations with weakly singular kernels. SIAM J. Math. Anal. 1971, 2, 242–258. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).