



Dynamic Analysis and Sliding Mode Synchronization Control of Chaotic Systems with Conditional Symmetric Fractional-Order Memristors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Conditionally Symmetric Fractional-Order Memristor Chaotic System
2.1. System Modeling
2.2. ADM of the System
3. Analysis of Dynamic Characteristics
3.1. Symmetry Analysis
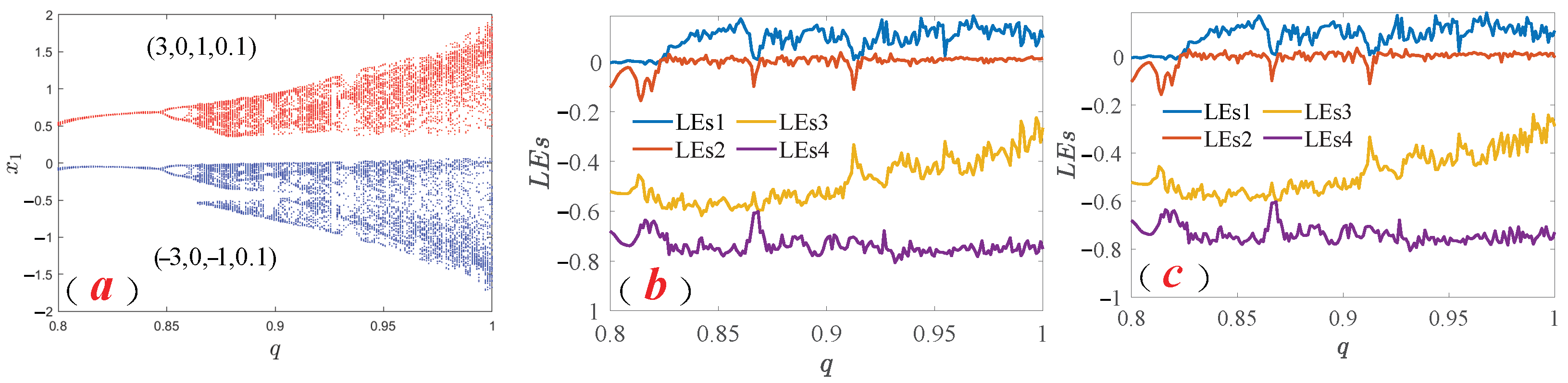
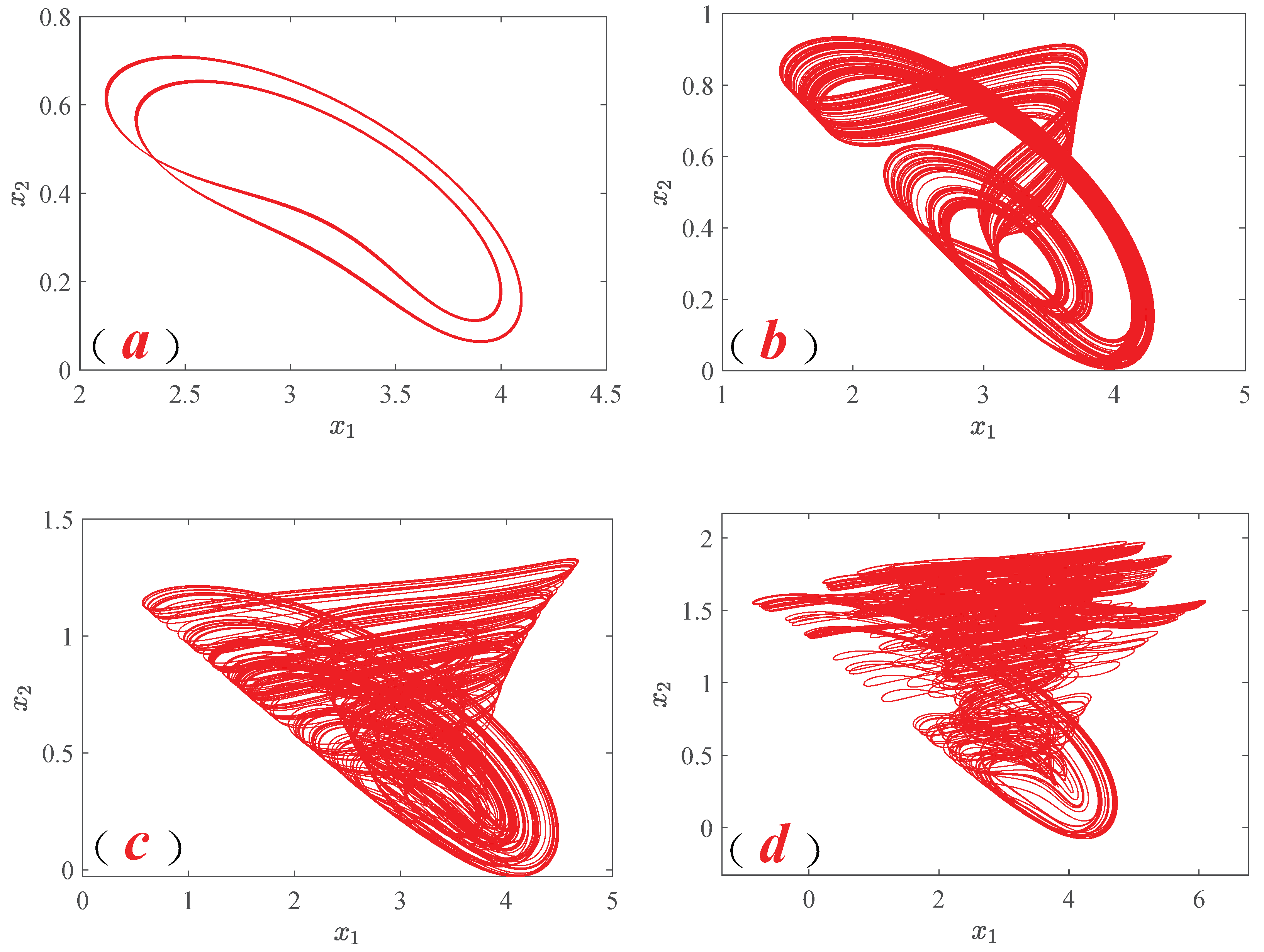
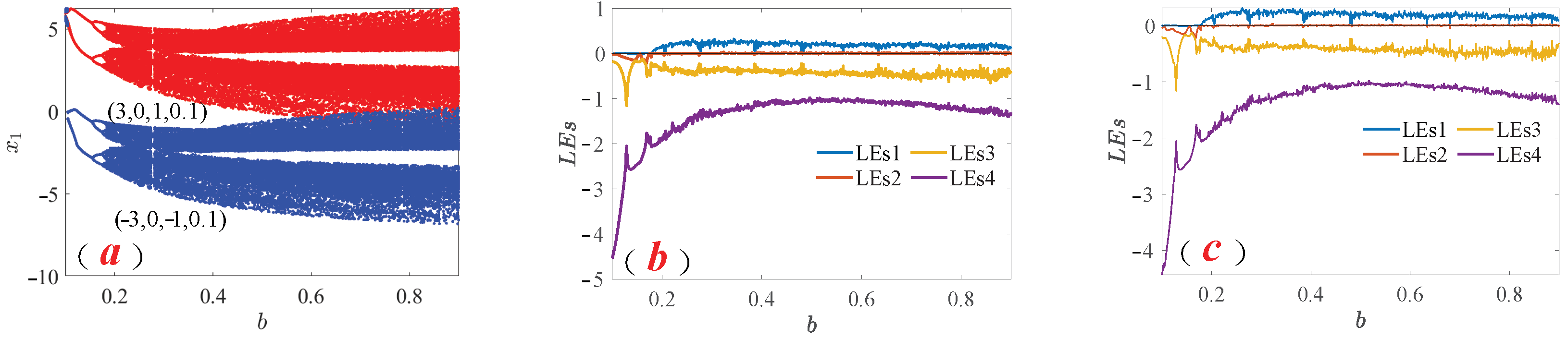
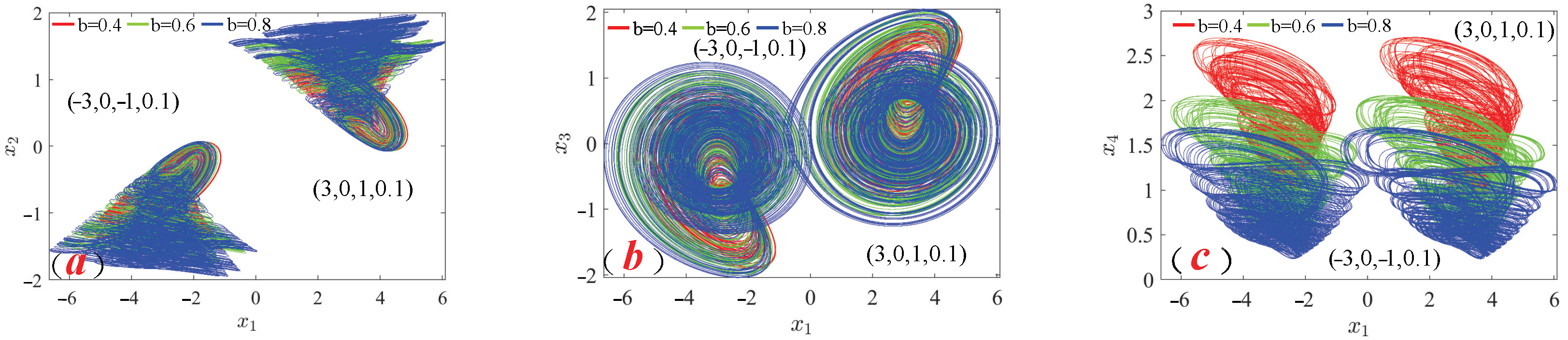
3.2. Coexistent Dynamic Behavior of System Orders Change
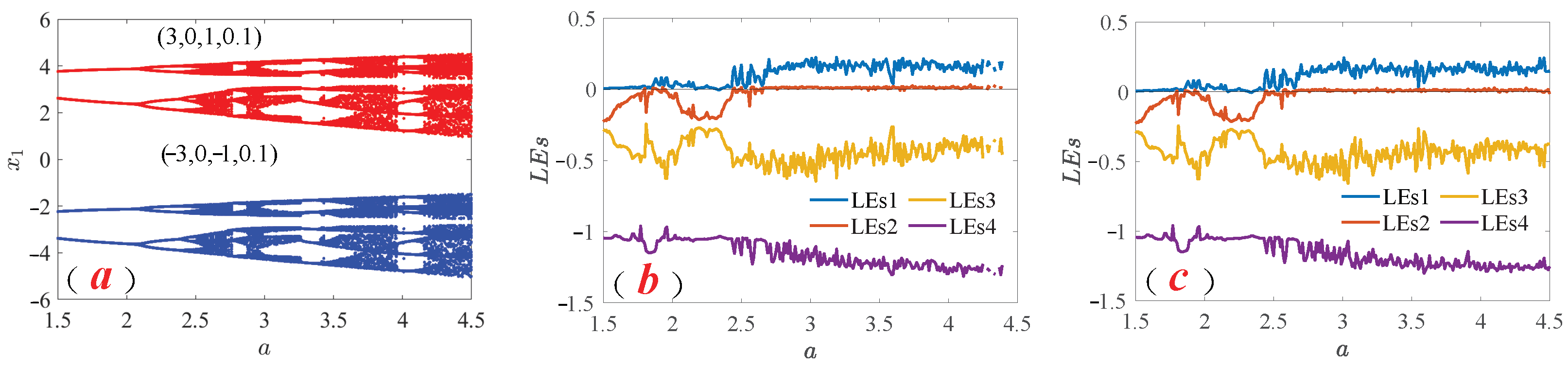
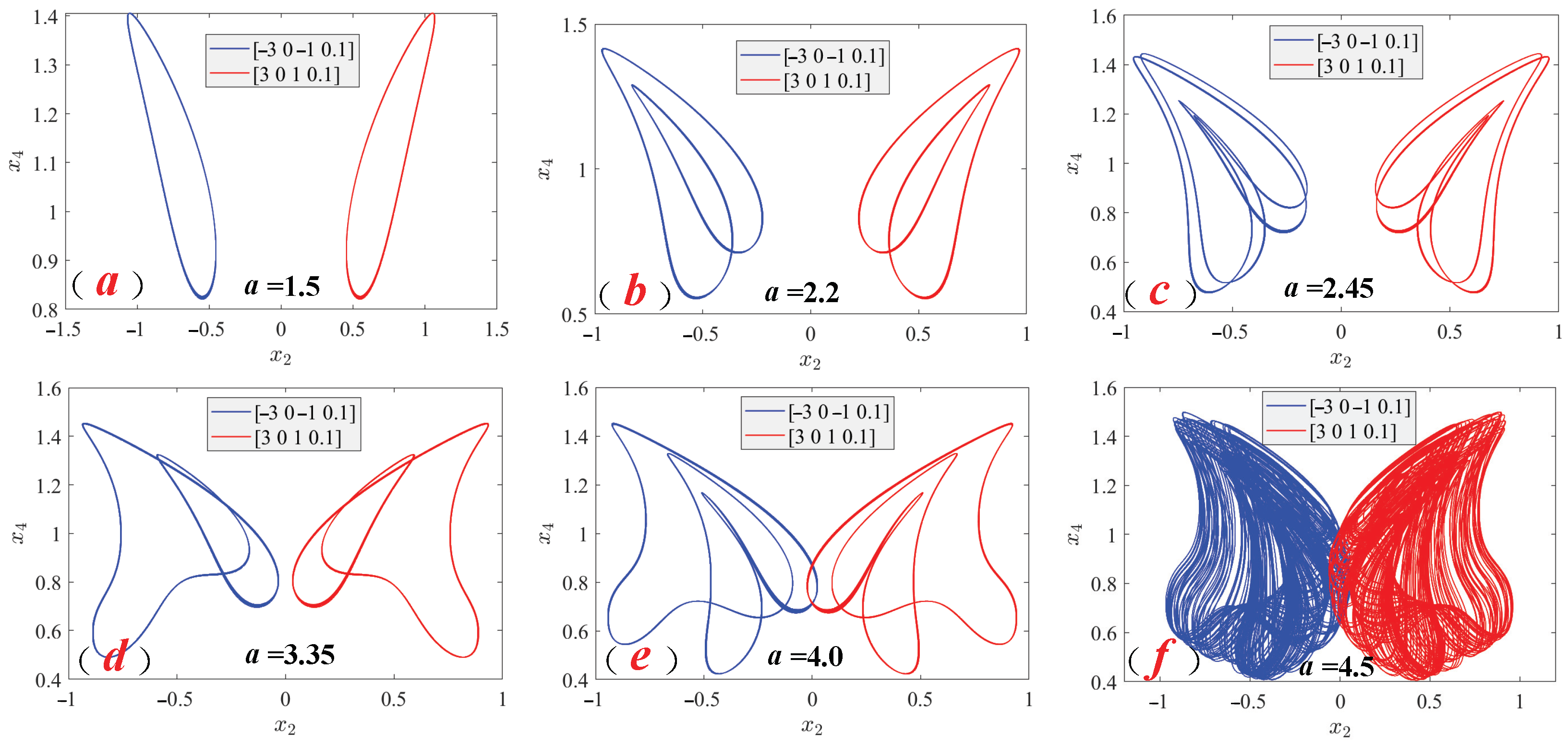
3.3. Coexistence Dynamics Behavior of System Parameter Changes
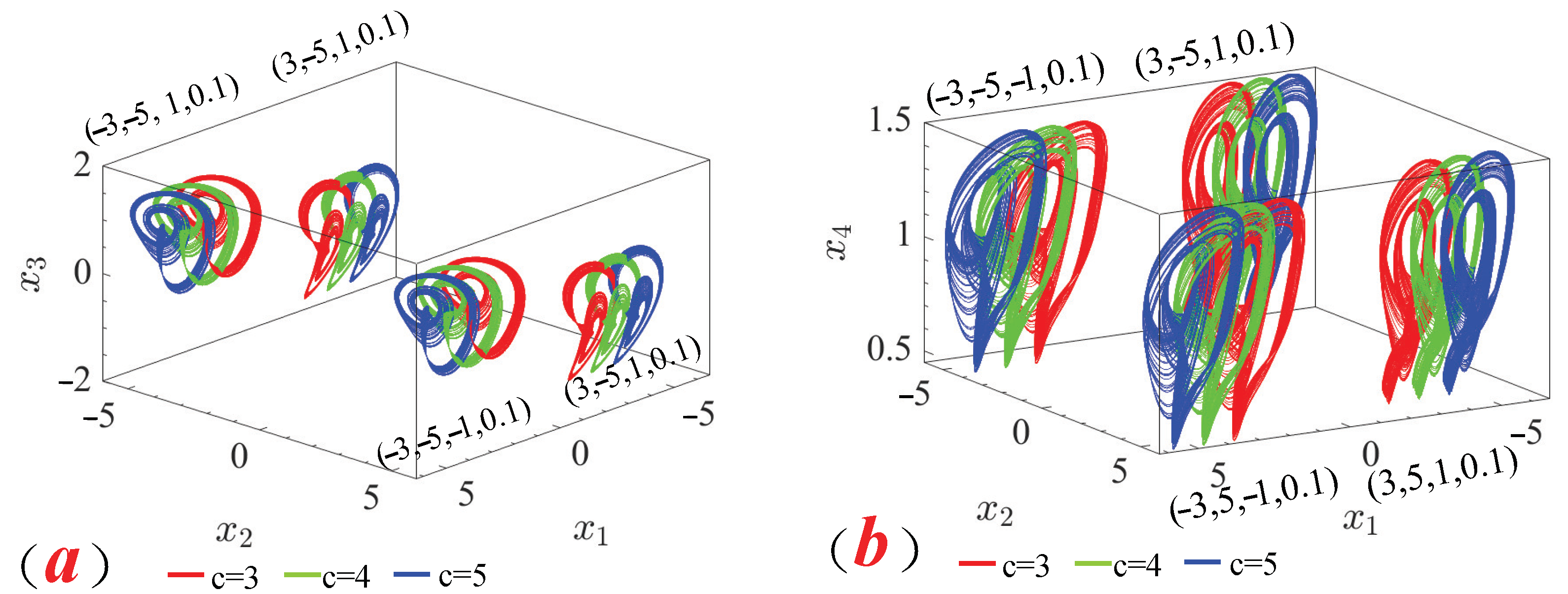
3.4. System Coexistence Offset Boosting Phenomenon
4. Fractional-Order Sliding Mode Synchronization
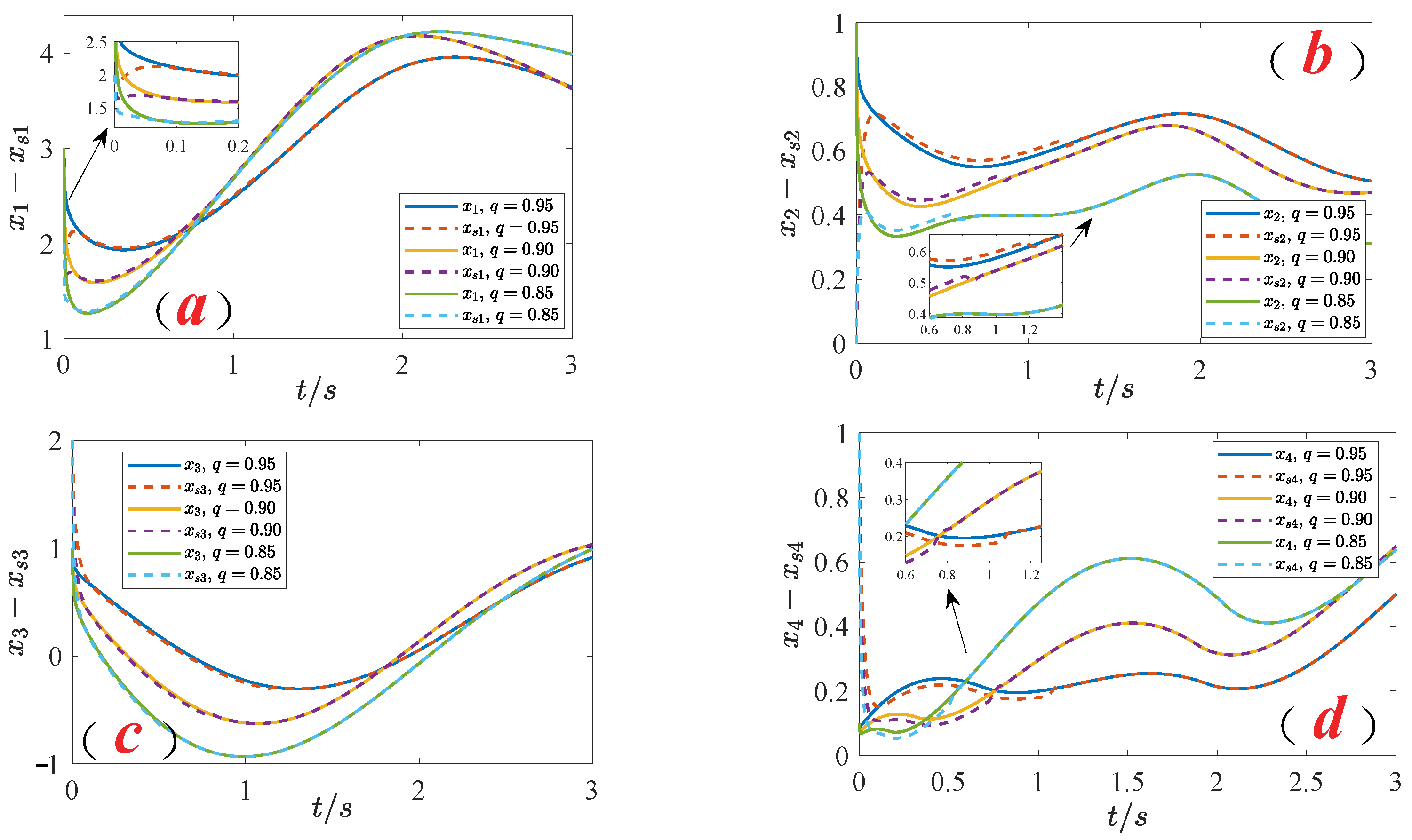
4.1. Implementation of Fractional-Order Sliding Mode Synchronization Control
4.2. Numerical Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADM | Adomian Decomposition Method |
| LEs | Lyapunov Exponent spectra |
| OGY control | Ott, Grebogi, and Yorke control |
| LLE | Largest Lyapunov Exponent |
Appendix A
References
- Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Wang, W.; Zhou, G.; Wang, Y.; Yan, B.; Sun, B.; Duan, S.; Song, Q. Multiphotoconductance levels of the organic semiconductor of polyimide-based memristor induced by interface charges. J. Phys. Chem. Lett. 2022, 13, 9941–9949. [Google Scholar] [CrossRef]
- Yi, S.i.; Kendall, J.D.; Williams, R.S.; Kumar, S. Activity-difference training of deep neural networks using memristor crossbars. Nat. Electron. 2023, 6, 45–51. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.; Liu, P.; Wen, S.; Wang, Y. Memristor-based neural network circuit with multimode generalization and differentiation on pavlov associative memory. IEEE Trans. Cybern. 2022, 53, 3351–3362. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, H.; Cao, Z.; Zhang, P. Dynamical analysis and fixed-time synchronization of a chaotic system with hidden attractor and a line equilibrium. Eur. Phys. J. Spec. Top. 2022, 231, 2455–2466. [Google Scholar] [CrossRef]
- Wang, Z.; Veeman, D.; Zhang, M.; Natiq, H.; Yang, R.; Hussain, I. A symmetric oscillator with multi-stability and chaotic dynamics: Bifurcations, circuit implementation, and impulsive control. Eur. Phys. J. Spec. Top. 2022, 231, 2153–2161. [Google Scholar] [CrossRef]
- Itoh, M.; Chua, L.O. Memristor oscillators. Int. J. Bifurc. Chaos 2008, 18, 3183–3206. [Google Scholar] [CrossRef]
- Muthuswamy, B.; Kokate, P.P. Memristor-based chaotic circuits. IETE Tech. Rev. 2009, 26, 417–429. [Google Scholar] [CrossRef]
- Muthuswamy, B. Implementing memristor based chaotic circuits. Int. J. Bifurc. Chaos 2010, 20, 1335–1350. [Google Scholar] [CrossRef]
- Bao, B.C.; Xu, Q.; Bao, H.; Chen, M. Extreme multistability in a memristive circuit. Electron. Lett. 2016, 52, 1008–1010. [Google Scholar] [CrossRef]
- Wang, Z.; Ramamoorthy, R.; Xi, X.; Rajagopal, K.; Zhang, P.; Jafari, S. The effects of extreme multistability on the collective dynamics of coupled memristive neurons. Eur. Phys. J. Spec. Top. 2022, 231, 3087–3094. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Chen, M.; Zhang, P.; Yang, R.; Yang, B. Chaotic system dynamics analysis and synchronization circuit realization of fractional-order memristor. Eur. Phys. J. Spec. Top. 2022, 231, 3095–3107. [Google Scholar] [CrossRef]
- Wang, Z.; Jamal, S.S.; Yang, B.; Pham, V.T. Complex behavior of COVID-19’s mathematical model. Eur. Phys. J. Spec. Top. 2022, 231, 885–891. [Google Scholar] [CrossRef]
- Xu, Q.; Lin, Y.; Bao, B.; Chen, M. Multiple attractors in a non-ideal active voltage-controlled memristor based Chua’s circuit. Chaos Solitons Fractals 2016, 83, 186–200. [Google Scholar] [CrossRef]
- Wu, H.; Bao, B.; Liu, Z.; Xu, Q.; Jiang, P. Chaotic and periodic bursting phenomena in a memristive Wien-bridge oscillator. Nonlinear Dyn. 2016, 83, 893–903. [Google Scholar] [CrossRef]
- Di Marco, M.; Forti, M.; Pancioni, L.; Innocenti, G.; Tesi, A.; Corinto, F. Oscillatory Circuits With a Real Non-Volatile Stanford Memristor Model. IEEE Access 2022, 10, 13650–13662. [Google Scholar] [CrossRef]
- Shen, Y.J.; Wen, S.F.; Li, X.H.; Yang, S.P.; Xing, H.J. Dynamical analysis of fractional-order nonlinear oscillator by incremental harmonic balance method. Nonlinear Dyn. 2016, 85, 1457–1467. [Google Scholar] [CrossRef]
- Sun, H.; Chen, W.; Wei, H.; Chen, Y. A comparative study of constant-order and variable-order fractional models in characterizing memory property of systems. Eur. Phys. J. Spec. Top. 2011, 193, 185–192. [Google Scholar] [CrossRef]
- Ding, D.; Xiao, H.; Yang, Z.; Luo, H.; Hu, Y.; Zhang, X.; Liu, Y. Coexisting multi-stability of Hopfield neural network based on coupled fractional-order locally active memristor and its application in image encryption. Nonlinear Dyn. 2022, 108, 4433–4458. [Google Scholar] [CrossRef]
- Ramakrishnan, B.; Cimen, M.E.; Akgul, A.; Li, C.; Rajagopal, K.; Kor, H. Chaotic Oscillations in a Fractional-Order Circuit with a Josephson Junction Resonator and Its Synchronization Using Fuzzy Sliding Mode Control. Math. Probl. Eng. 2022, 2022, 6744349. [Google Scholar] [CrossRef]
- Tian, H.; Liu, J.; Wang, Z.; Xie, F.; Cao, Z. Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift. Fractal Fract. 2022, 7, 2. [Google Scholar] [CrossRef]
- Ding, D.; Chen, X.; Yang, Z.; Hu, Y.; Wang, M.; Niu, Y. Dynamics of stimuli-based fractional-order memristor-coupled tabu learning two-neuron model and its engineering applications. Nonlinear Dyn. 2023, 111, 1791–1817. [Google Scholar] [CrossRef]
- Huang, Z.; Yang, C.; Zhou, X.; Gui, W.; Huang, T. Brain-inspired STA for parameter estimation of fractional-order memristor-based chaotic systems. Appl. Intell. 2023, 53, 18653–18665. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C.; Xing, H. Constructing chaotic systems with conditional symmetry. Nonlinear Dyn. 2017, 87, 1351–1358. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C.; Liu, Y.; Gu, Z.; Zhang, J. Offset boosting for breeding conditional symmetry. Int. J. Bifurc. Chaos 2018, 28, 1850163. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef]
- Calgan, H. Novel tilt integral sliding mode controller and observer design for sensorless speed control of a permanent magnet synchronous motor. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2022, 41, 455–470. [Google Scholar] [CrossRef]
- Zhao, Q.; Sun, W.; Zhang, X.; Cheng, C. Study on the Adaptive Digital Sampling Synchronization of Smart Substation. In Proceedings of the 17th Annual Conference of China Electrotechnical Society, Beijing, China, 17–18 September 2022; Springer: Berlin/Heidelberg, Germany, 2023; Volume II, pp. 901–913. [Google Scholar]
- Sajjadi, S.S.; Baleanu, D.; Jajarmi, A.; Pirouz, H.M. A new adaptive synchronization and hyperchaos control of a biological snap oscillator. Chaos Solitons Fractals 2020, 138, 109919. [Google Scholar] [CrossRef]
- Wang, Z.; Panahi, S.; Khalaf, A.; Jafari, S.; Hussain, I. Synchronization of chaotic jerk systems. Int. J. Mod. Phys. B 2020, 34, 2050189. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S. A novel hybrid control strategy and dynamic performance enhancement of a 3.3 kW GaN–HEMT-based iL2C resonant full-bridge DC–DC Power converter methodology for electric vehicle charging systems. Energies 2023, 16, 5811. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, P.; Chen, M.; Wang, Y. Dynamic analysis and robust control of a chaotic system with hidden attractor. Complexity 2021, 8865522, 1–11. [Google Scholar] [CrossRef]
- Alasty, A.; Salarieh, H. Controlling the chaos using fuzzy estimation of OGY and Pyragas controllers. Chaos Solitons Fractals 2005, 26, 379–392. [Google Scholar] [CrossRef]
- Feki, M. Sliding mode control and synchronization of chaotic systems with parametric uncertainties. Chaos Solitons Fractals 2009, 41, 1390–1400. [Google Scholar] [CrossRef]
- You, T.; Hu, Y. Design of the linear controller of a class of time-delay chaos. Clust. Comput. 2019, 22, 2639–2644. [Google Scholar] [CrossRef]
- Tabasi, M.; Balochian, S. Synchronization of fractional order chaotic system of sprott circuit using fractional active fault tolerant controller. Int. J. Dyn. Control 2021, 9, 1695–1702. [Google Scholar] [CrossRef]
- Almatroud, A.O.; Jawarneh, Y.; Al-sawalha, M.M.; Noorani, M.S.M. On The Anti-Synchronization Of Fractional-Order Chaotic And Hyperchaotic Systems Via Modified Adaptive Sliding-Mode Control. Turk. J. Comput. Math. Educ. (TURCOMAT) 2021, 12, 1112–1123. [Google Scholar]
- Chen, L.; Fang, J.a. Adaptive Continuous Sliding Mode Control for Fractional-order Systems with Uncertainties and Unknown Control Gains. Int. J. Control Autom. Syst. 2022, 20, 1509–1520. [Google Scholar] [CrossRef]
- Zambrano-Serrano, E.; Bekiros, S.; Platas-Garza, M.A.; Posadas-Castillo, C.; Agarwal, P.; Jahanshahi, H.; Aly, A.A. On chaos and projective synchronization of a fractional difference map with no equilibria using a fuzzy-based state feedback control. Phys. A Stat. Mech. Its Appl. 2021, 578, 126100. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C. Variable-boostable chaotic flows. Optik 2016, 127, 10389–10398. [Google Scholar] [CrossRef]
- Lu, T.; Li, C.; Wang, X.; Tao, C.; Liu, Z. A memristive chaotic system with offset-boostable conditional symmetry. Eur. Phys. J. Spec. Top. 2020, 229, 1059–1069. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, H.; Zhao, M.; Liu, J.; Wang, Q.; Yu, X.; Wang, Z. Dynamic Analysis and Sliding Mode Synchronization Control of Chaotic Systems with Conditional Symmetric Fractional-Order Memristors. Fractal Fract. 2024, 8, 307. https://doi.org/10.3390/fractalfract8060307
Tian H, Zhao M, Liu J, Wang Q, Yu X, Wang Z. Dynamic Analysis and Sliding Mode Synchronization Control of Chaotic Systems with Conditional Symmetric Fractional-Order Memristors. Fractal and Fractional. 2024; 8(6):307. https://doi.org/10.3390/fractalfract8060307
Chicago/Turabian StyleTian, Huaigu, Mingwei Zhao, Jindong Liu, Qiao Wang, Xiong Yu, and Zhen Wang. 2024. "Dynamic Analysis and Sliding Mode Synchronization Control of Chaotic Systems with Conditional Symmetric Fractional-Order Memristors" Fractal and Fractional 8, no. 6: 307. https://doi.org/10.3390/fractalfract8060307
APA StyleTian, H., Zhao, M., Liu, J., Wang, Q., Yu, X., & Wang, Z. (2024). Dynamic Analysis and Sliding Mode Synchronization Control of Chaotic Systems with Conditional Symmetric Fractional-Order Memristors. Fractal and Fractional, 8(6), 307. https://doi.org/10.3390/fractalfract8060307