
Remaining Useful Life Prediction of Roller Bearings Based on Fractional Brownian Motion

 ,
, 

Abstract
1. Introduction
2. Long-Range Dependence and Fractional Brownian Motion
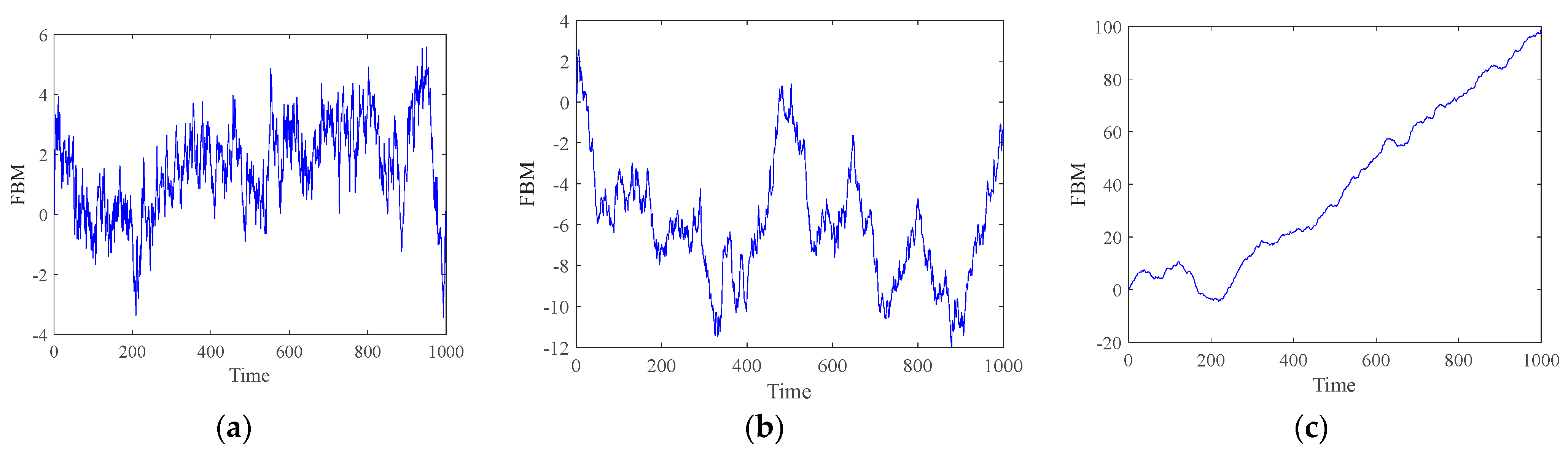
2.1. Fractional Brownian Motion
- (1)
- Its increments are independent.
- (2)
- Its increments follows a normal distribution with a zero mean.
- (3)
- The stochastic process is continuous.
- (4)
- The initial value is 0, i.e., .
2.2. Fractional Brownian Motion
3. Degradation Modelling and Parameter Estimation
3.1. Stochastic Model Based on FBM
3.2. Parameter Estimation
4. Three-Step RUL Prediction Model for Roller Bearings
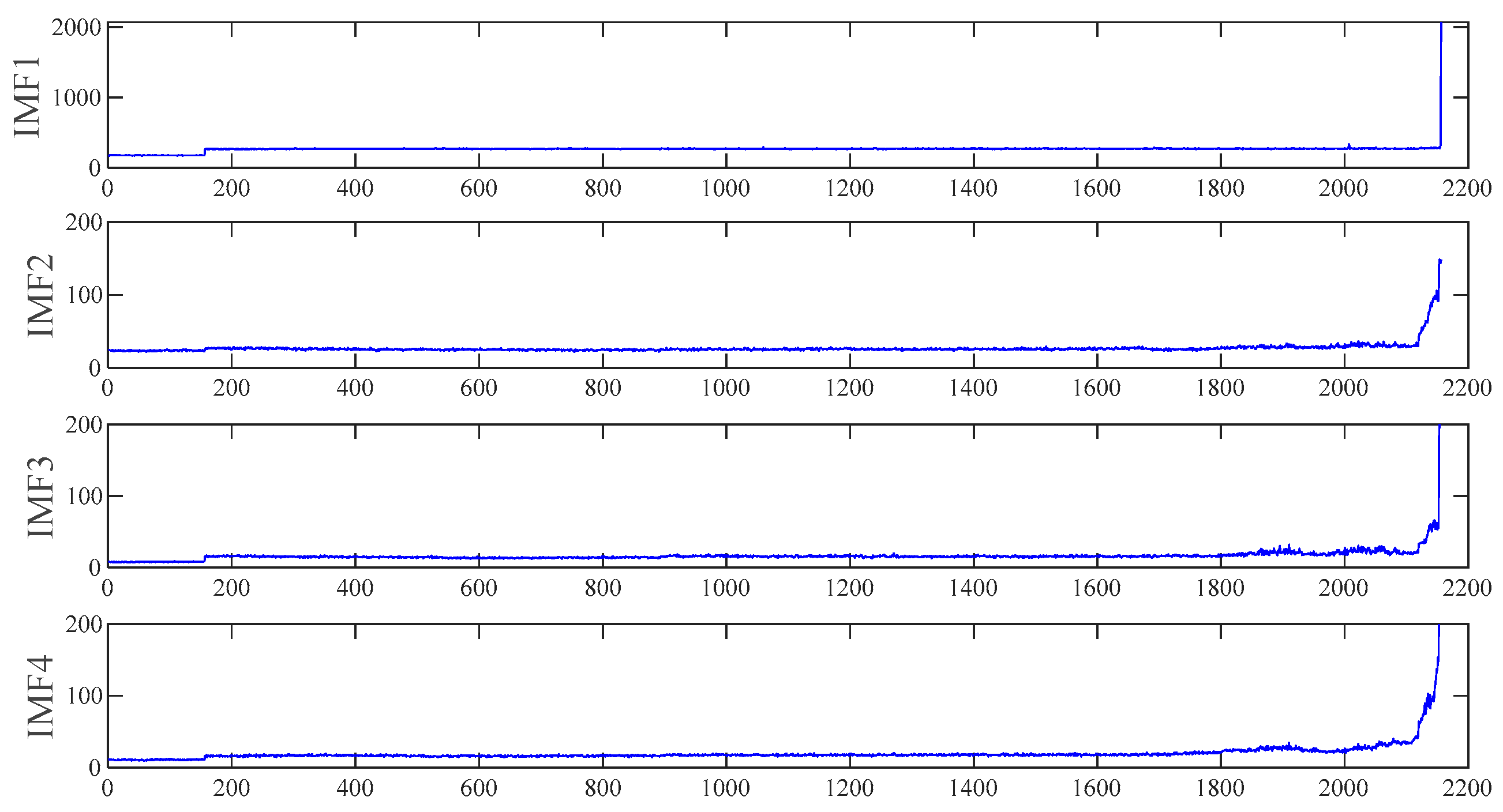
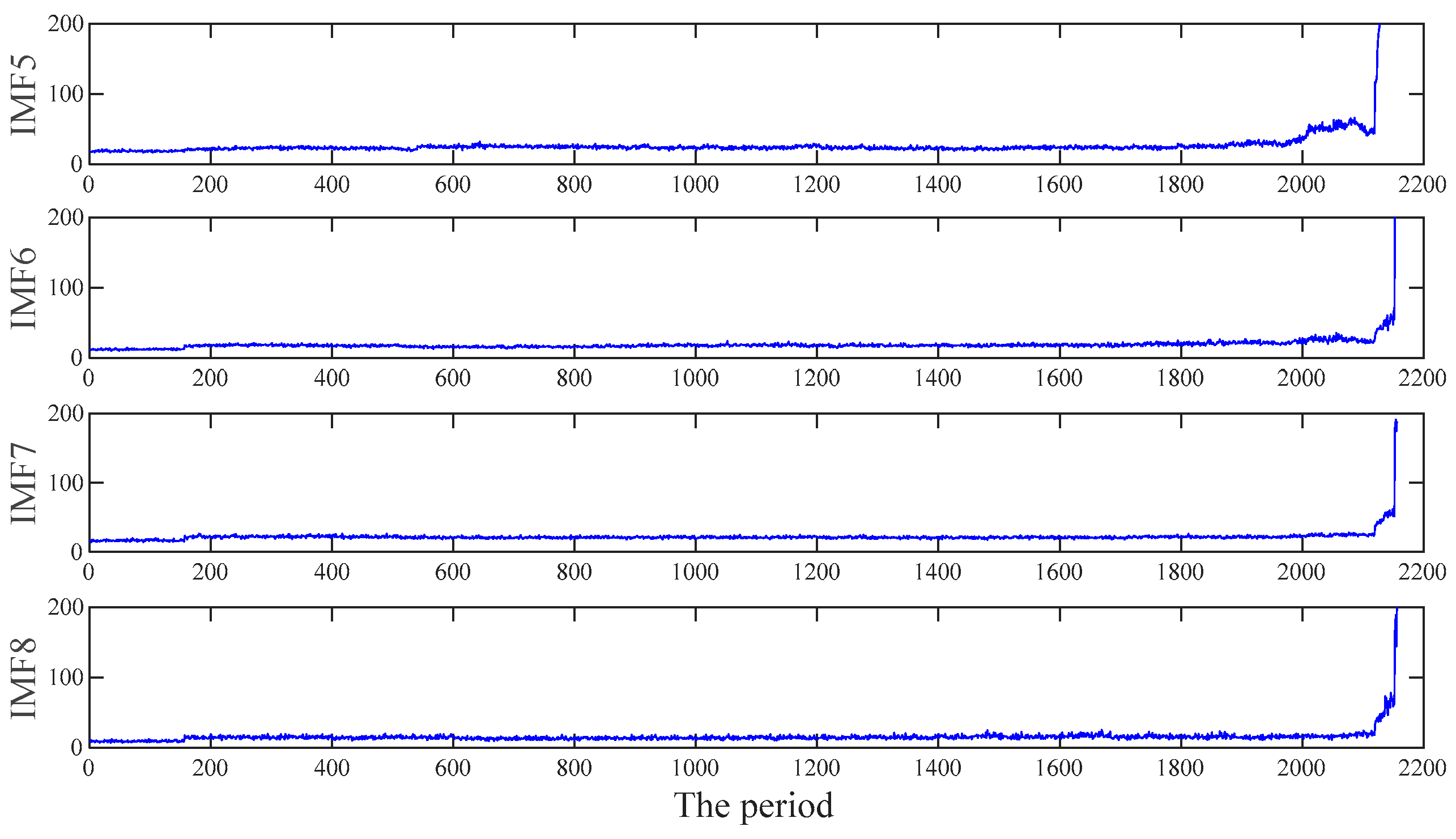
4.1. Degradation Feature Decomposition
4.2. Metric-Based Degradation Component Selection Algorithm
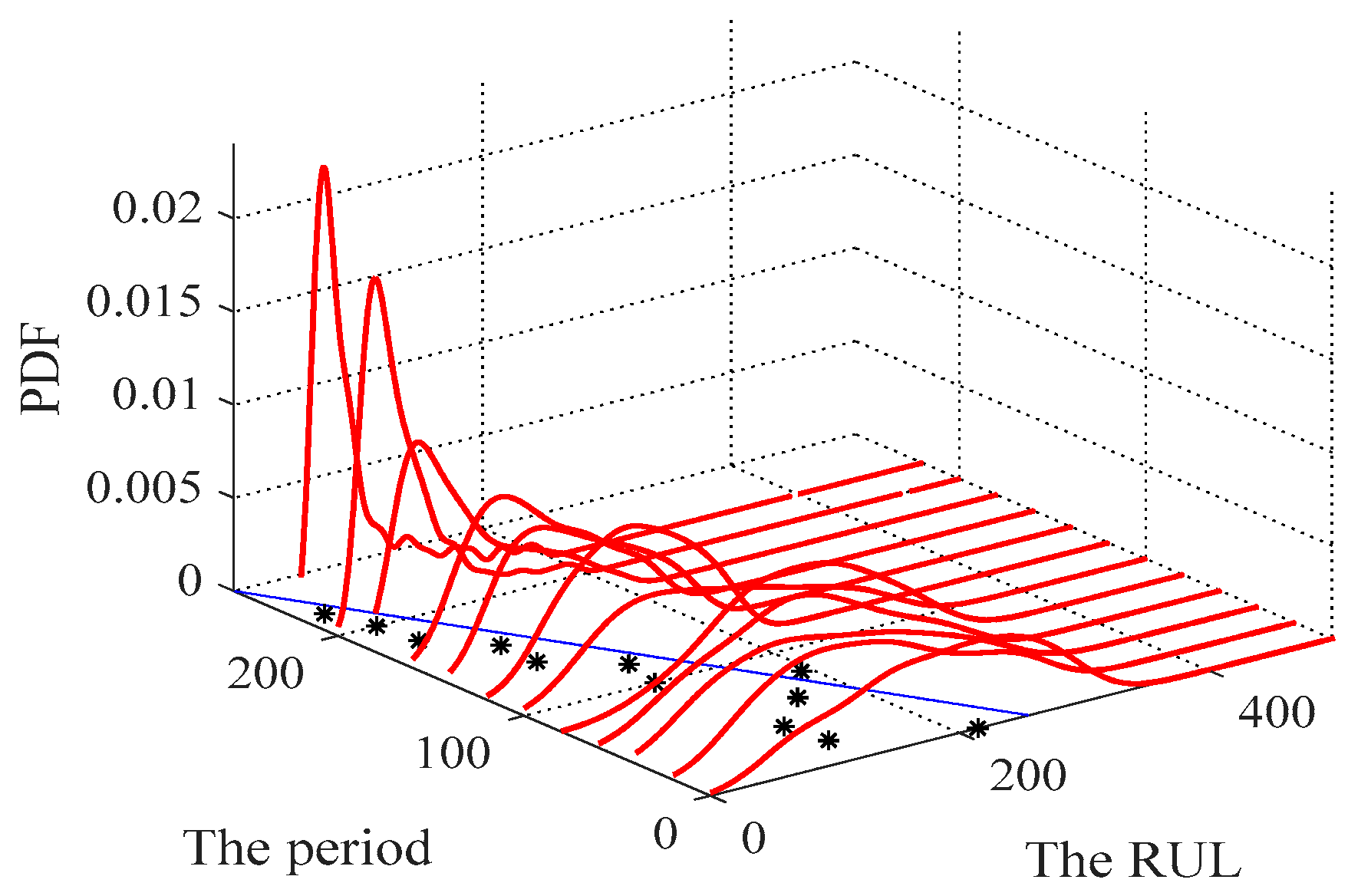
4.3. Monte Carlo Simulation for RUL Prediction
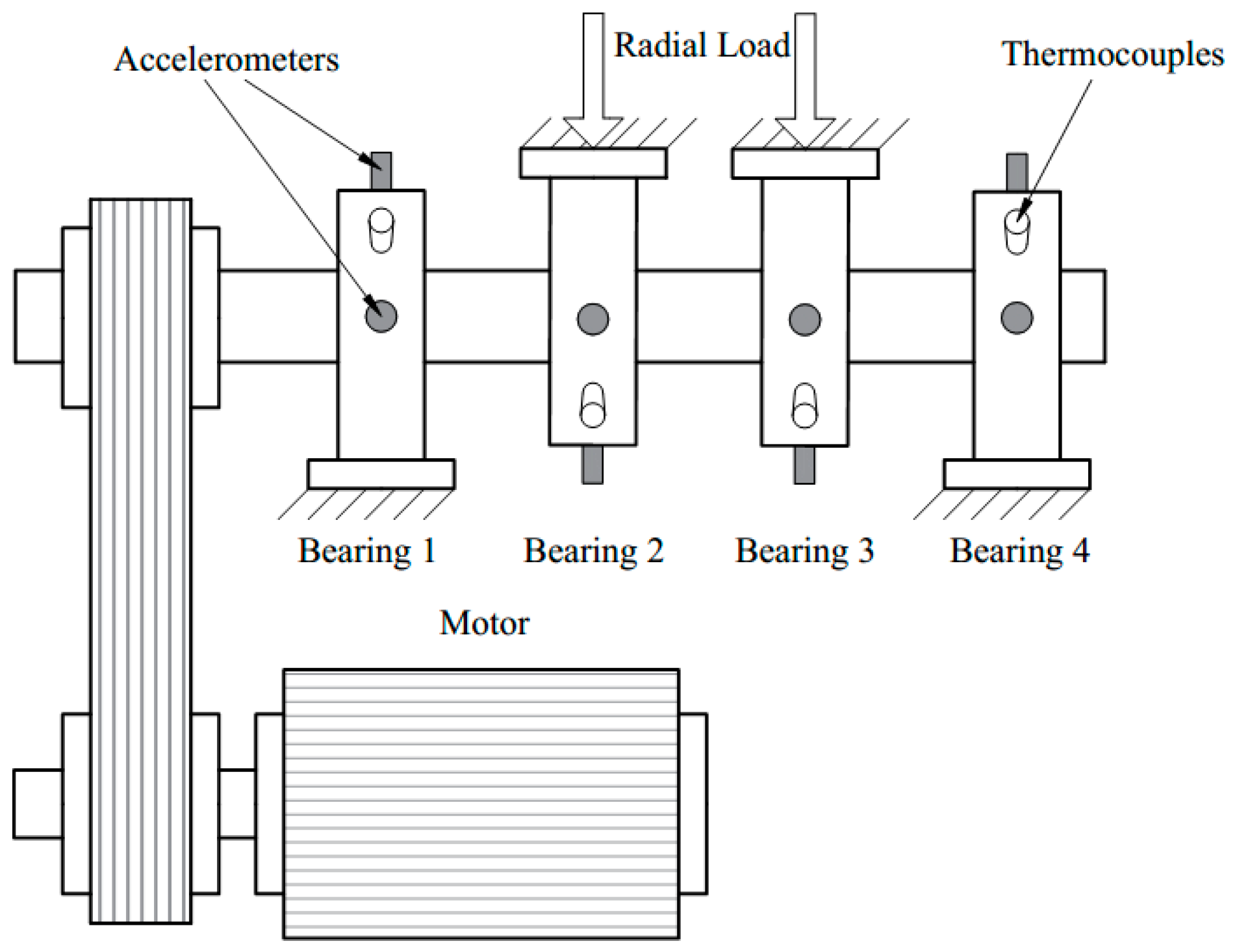
5. Case Study
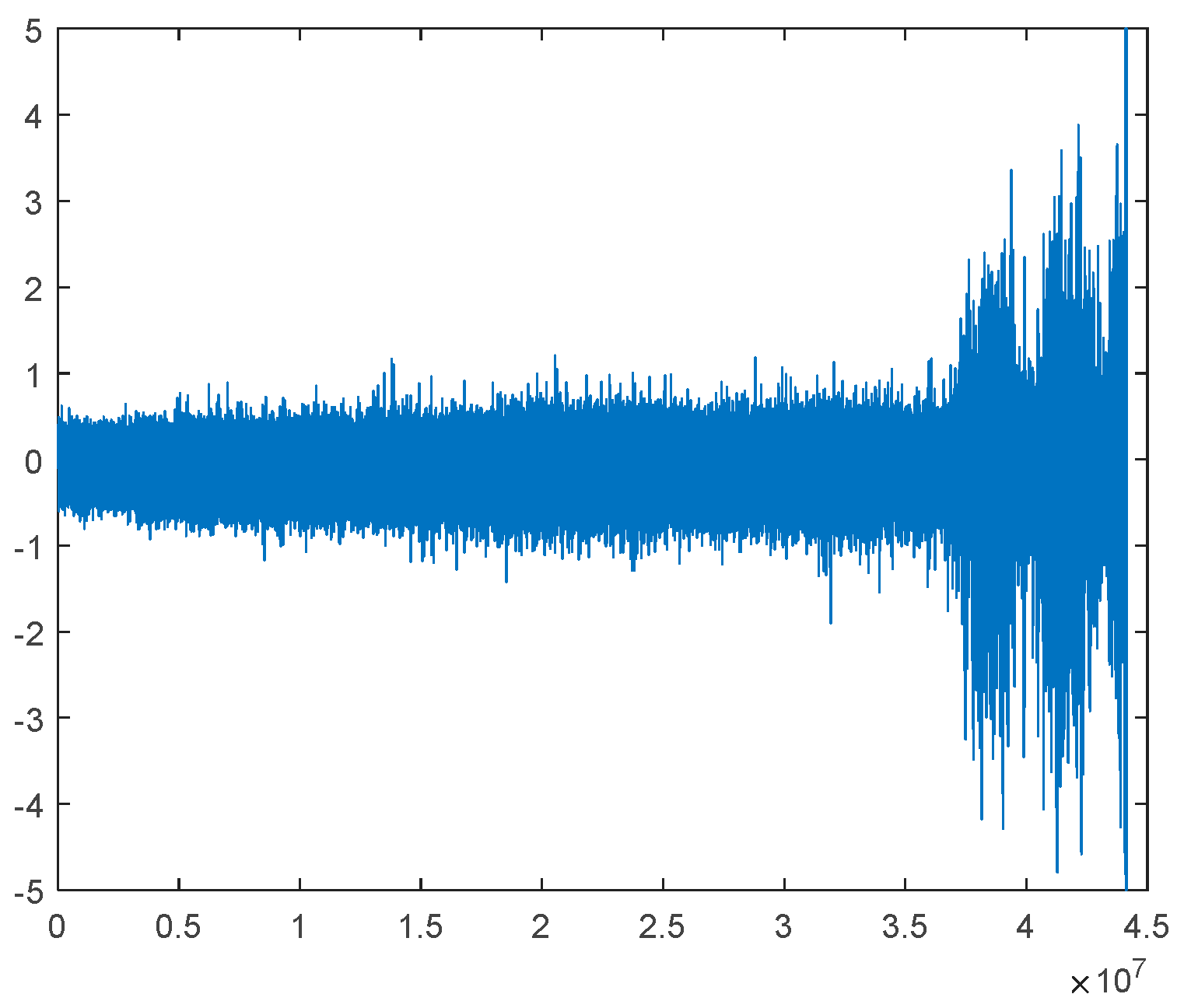
5.1. Data Description
5.2. HI Construction of the Experimental Bearing Data
5.3. RUL Prediction and Performance Evaluation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LRD | long-range dependence |
| RUL | remaining useful life |
| FBM | fractional Brownian motion |
| VMD | variational mode decomposition |
| ACF | autocorrelation function |
| MLE | maximum likelihood estimation |
| LSTM | Long short-term memory neural network |
| HI | health indicator |
| IMFS | intrinsic mode function |
References
- Vichare, N.M.; Pecht, M.G. Prognostics and health management of electronics. IEEE Trans. Compon. Packag. Technol. 2006, 29, 222–229. [Google Scholar] [CrossRef]
- Lee, M.L.T.; Whitmore, G.A. Threshold Regression for Survival Analysis: Modeling Event Times by a Stochastic Process Reaching a Boundary. Stat. Sci. 2006, 21, 501–513. [Google Scholar] [CrossRef]
- Si, X.-S.; Wang, W.; Hu, C.H.; Zhou, D.-H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Yang, G. Environmental-stress-screening using degradation measurements. IEEE Trans. Reliab. 2002, 51, 288–293. [Google Scholar] [CrossRef]
- Chao, M. Degradation analysis and related topics: Some thoughts and a review. In Proceedings-National Science Council Republic of China Part A Physical Science and Engineering; The National Science Council: Taipei, Taiwan, 1999; Volume 23, pp. 555–566. [Google Scholar]
- Ye, Z.S.; Xie, M. Stochastic modelling and analysis of degradation for highly reliable products. Appl. Stoch. Models Bus. Ind. 2015, 31, 16–32. [Google Scholar] [CrossRef]
- Lee, M.Y.; Tang, J. A modified EM-algorithm for estimating the parameters of inverse Gaussian distribution based on time-censored Wiener degradation data. Stat. Sin. 2007, 17, 873–893. [Google Scholar]
- Si, X.S.; Wang, W.B.; Hu, C.H.; Zhou, D.H.; Pecht, M.G. Remaining Useful Life Estimation Based on a Nonlinear Diffusion Degradation Process. IEEE Trans. Reliab. 2012, 61, 50–67. [Google Scholar] [CrossRef]
- Wei, M.H.; Chen, M.Y.; Zhou, D.H. Multi-Sensor Information Based Remaining Useful Life Prediction With Anticipated Performance. IEEE Trans. Reliab. 2013, 62, 183–198. [Google Scholar] [CrossRef]
- Bagdonavicius, V.; Nikulin, M.S. Estimation in degradation models with explanatory variables. Lifetime Data Anal. 2001, 7, 85–103. [Google Scholar] [CrossRef]
- Park, C.; Padgett, W.J. Stochastic degradation models with several accelerating variables. IEEE Trans. Reliab. 2006, 55, 379–390. [Google Scholar] [CrossRef]
- Wang, H.W.; Xu, T.X.; Mi, Q.L. Lifetime prediction based on Gamma processes from accelerated degradation data. Chin. J. Aeronaut. 2015, 28, 172–179. [Google Scholar] [CrossRef]
- Ye, Z.S.; Chen, N. The Inverse Gaussian Process as a Degradation Model. Technometrics 2014, 56, 302–311. [Google Scholar] [CrossRef]
- Pan, D.H.; Liu, J.B.; Cao, J.D. Remaining useful life estimation using an inverse Gaussian degradation model. Neurocomputing 2016, 185, 64–72. [Google Scholar] [CrossRef]
- Li, X.Y.; Wu, J.P.; Ma, H.G.; Li, X.; Kang, R. A Random Fuzzy Accelerated Degradation Model and Statistical Analysis. IEEE Trans. Fuzzy Syst. 2018, 26, 1638–1650. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C.; Lei, Y. Degradation data analysis and remaining useful life estimation: A review on Wiener-process-based methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Beran, J. Statistics for Long-Memory Processes; Chapman & Hall: New York, NY, USA, 1994. [Google Scholar]
- Hurst, H.E. Long Term Storage Capacity of Reservoirs. Trans. Am. Soc. Civ. Eng. 1951, 116, 770–779. [Google Scholar] [CrossRef]
- Gui, Y.; Han, Q.K.; Chu, F.L. A vibration model for fault diagnosis of planetary gearboxes with localized planet bearing defects. J. Mech. Sci. Technol. 2016, 30, 4109–4119. [Google Scholar]
- Mandelbrot, B.B.; Ness, J.W.V. Fractional Brownian Motions, Fractional Noises and Applications. SIAM Rev. 1968, 10, 422–437. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A Parameter-Adaptive VMD Method Based on Grasshopper Optimization Algorithm to Analyze Vibration Signals from Rotating Machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Lei, Y.G.; Li, N.P.; Guo, L.; Li, N.B.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Mandelbrot, B.B.; Wallis, J.R. Robustness of The Rescaled Range R/S in The Measurement of Noncyclic Long-Run Statistical Dependence. Water Resour. 1969, 5, 967–988. [Google Scholar] [CrossRef]
- Taqqu, M.S.; Teverovsky, V. Robustness of Whittle-type Estimators for Time Series with Long-Range Dependence. Stochastic. Models 1997, 13, 723–757. [Google Scholar] [CrossRef]
- Beran, J.A.N. Fitting Long-Memory Models by Generalized Linear Regression. Biometrika 1993, 80, 817–822. [Google Scholar] [CrossRef]
- Clausel, M.; Roueff, F.; Taqqu, M.S.; Tudor, C. Wavelet Estimation of the Long Memory Parameter for Hermite Polynomial of Gaussian Processes. Esaim-Probab. Stat. 2014, 18, 42–76. [Google Scholar] [CrossRef]
- Li, M. Modeling autocorrelation functions of long-range dependent teletraffic series based on optimal approximation in Hilbert space—A further study. Appl. Math. Model. 2007, 31, 625–631. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Sun, R.T.; Zhou, A.H. An improved Hurst parameter estimator based on fractional Fourier transform. Telecommun. Syst. 2010, 43, 197–206. [Google Scholar] [CrossRef]
- Lagarias, J.; Reeds, J.A.; Wright, M.H.; Wright, P. Convergence Properties of the Nelder—Mead Simplex Method in Low Dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar]
- Liao, L.; Jin, W.; Pavel, R. Enhanced Restricted Boltzmann Machine With Prognosability Regularization for Prognostics and Health Assessment. IEEE Trans. Ind. Electron. 2016, 63, 7076–7083. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, M.; Xi, X. Remaining useful life prediction for degradation processes with long-range dependence. IEEE Trans. Reliab. 2017, 66, 1368–1379. [Google Scholar] [CrossRef]
- Li, Z.P.; Chen, J.L.; Zi, Y.Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.J.; Xu, J.W. Degradation Feature Selection for Remaining Useful Life Prediction of Rolling Element Bearings. Qual. Reliab. Eng. Int. 2016, 32, 547–554. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N.; Nectoux, P. Enabling Health Monitoring Approach Based on Vibration Data for Accurate Prognostics. IEEE Trans. Ind. Electron. 2016, 62, 647–656. [Google Scholar] [CrossRef]
- Lemieux, C. Monte Carlo and Quasi-Monte Carlo Sampling; Springer Science: Berlin, Germany, 2009. [Google Scholar]
- Wanqing, S.; He, L.; Enrico, Z. Long-range dependence and heavy tail characteristics for remaining useful life prediction in rolling bearing degradation. Appl. Math. Model. 2022, 102, 268–284. [Google Scholar]
- Yang, F.; Habibullah, M.S.; Zhang, T.Y.; Xu, Z.; Lim, P.; Nadarajan, S. Health Index-Based Prognostics for Remaining Useful Life Predictions in Electrical Machines. IEEE Trans. Ind. Electron. 2016, 63, 2633–2644. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 |
|---|---|---|---|---|---|---|---|---|
| Monotonicity | 0.9702 | 1.0424 | 1.0135 | 1.0604 | 0.9955 | 1.0388 | 0.9811 | 1.0099 |
| Robustness | 0.9873 | 0.9593 | 0.9445 | 0.9584 | 0.9487 | 0.9389 | 0.9600 | 0.9093 |
| Trendability | 0.0900 | 0.4366 | 0.4056 | 0.4382 | 0.3557 | 0.3210 | 0.3727 | 0.3435 |
| Model | ETA | RMSE | MAPE |
|---|---|---|---|
| M2 | 04713 | 29.8189 | 13.7429 |
| M3 | 0.3238 | 52.7707 | 33.0301 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, W.; Zhong, M.; Yang, M.; Qi, D.; Spadini, S.; Cattani, P.; Villecco, F. Remaining Useful Life Prediction of Roller Bearings Based on Fractional Brownian Motion. Fractal Fract. 2024, 8, 183. https://doi.org/10.3390/fractalfract8040183
Song W, Zhong M, Yang M, Qi D, Spadini S, Cattani P, Villecco F. Remaining Useful Life Prediction of Roller Bearings Based on Fractional Brownian Motion. Fractal and Fractional. 2024; 8(4):183. https://doi.org/10.3390/fractalfract8040183
Chicago/Turabian StyleSong, Wanqing, Mingdeng Zhong, Minjie Yang, Deyu Qi, Simone Spadini, Piercarlo Cattani, and Francesco Villecco. 2024. "Remaining Useful Life Prediction of Roller Bearings Based on Fractional Brownian Motion" Fractal and Fractional 8, no. 4: 183. https://doi.org/10.3390/fractalfract8040183
APA StyleSong, W., Zhong, M., Yang, M., Qi, D., Spadini, S., Cattani, P., & Villecco, F. (2024). Remaining Useful Life Prediction of Roller Bearings Based on Fractional Brownian Motion. Fractal and Fractional, 8(4), 183. https://doi.org/10.3390/fractalfract8040183