
Approximating Partial Differential Equations with Physics-Informed Legendre Multiwavelets CNN



Abstract
1. Introduction
- •
- Construct a set of new standard orthogonal compact supported LMWs.
- •
- Prove the compact support property of LMWs integrated twice.
- •
- Propose a novel network called PiLMWs-CNN to obtain LMWs coefficients (LMWCs) for approximating PDEs.
2. NN Works for Solving PDEs
2.1. Physics-Informed Methods
2.2. Neural Operators’ Learning
2.3. Wavelets and CNN
3. Method
3.1. Feasibility Analysis
- Multiscale Representation: PDEs often involve spatial features at different scales. By using the LMWs, it provides the capability of multiscale representation, which can better capture the features of the input data at different scales. This is crucial for analyzing and solving PDEs involving multiscale spatial features.
- Local Correlation Modeling: The mathematical models in PDEs often assume that the system’s behavior is influenced by its local neighborhood. The LMWs have good properties in capturing the local correlation of input data effectively. By using convolution operations in CNN, it can leverage this local correlation and perform local feature extraction on the input data, which helps in describing the local behavior in PDEs more accurately. Bedford et al. [44] prove rigorously that good approximation “locally” guarantees good approximation globally.
- Translation Invariance: Analysis of spatial translation invariance is often required for input data in PDEs. The translation invariance property of LMWs ensures that the translation of input signals does not affect the representation of their MW coefficients (MWCs). In CNN, convolution operations can preserve the translation invariance of input data, better meeting the requirement of translation invariance in PDEs.
- Explanation and Interpretability: LMWs have good explanatory and interpretable properties, providing insights into the features and structure of PDEs. By combining LMWs with CNN, we can leverage the explanatory power of MWs and the learning capability of CNN to better understand and interpret the feature representations of PDEs. In fact, Restricted Boltzmann machines (RBMs) [45] and other variants of DL models, such as deep belief networks and autoencoders, have a clear advantage in providing explanations and interpretability.
- Reduced computational cost: The compact support of LMWs enables a smaller set of wavelet coefficients to be considered, thereby reducing the computational burden associated with representing the solution as a wavelet series;
- Localized feature extraction: LMWs are well suited for extracting localized features within the solution, facilitating the NN’s ability to comprehend the underlying structure of the PDE;
- Regularization effect: LMWs’ compact support property inherently creates a regularization effect in the NN, which reduces overfitting and improves the generalization performance;
- Adaptability to different scales: LMWs readily adapt to various scales by adjusting the wavelet coefficients, permitting the NN to capture features at different resolutions;
- Robustness to noise: LMWs’ compact support enhances their resilience to noise and other imperfections in the input data, enabling more accurate solutions to be obtained when employed in conjunction with NNs.
3.2. Foundations of Multiwavelet Bases’ Construction in Mathematics
3.2.1. MW Bases
3.2.2. Multiple-Dimensional Construction
3.3. Construct LMWs
3.3.1. Legendre Polynomials
3.3.2. LMWs
3.3.3. Compact Support
3.3.4. Function Approximation
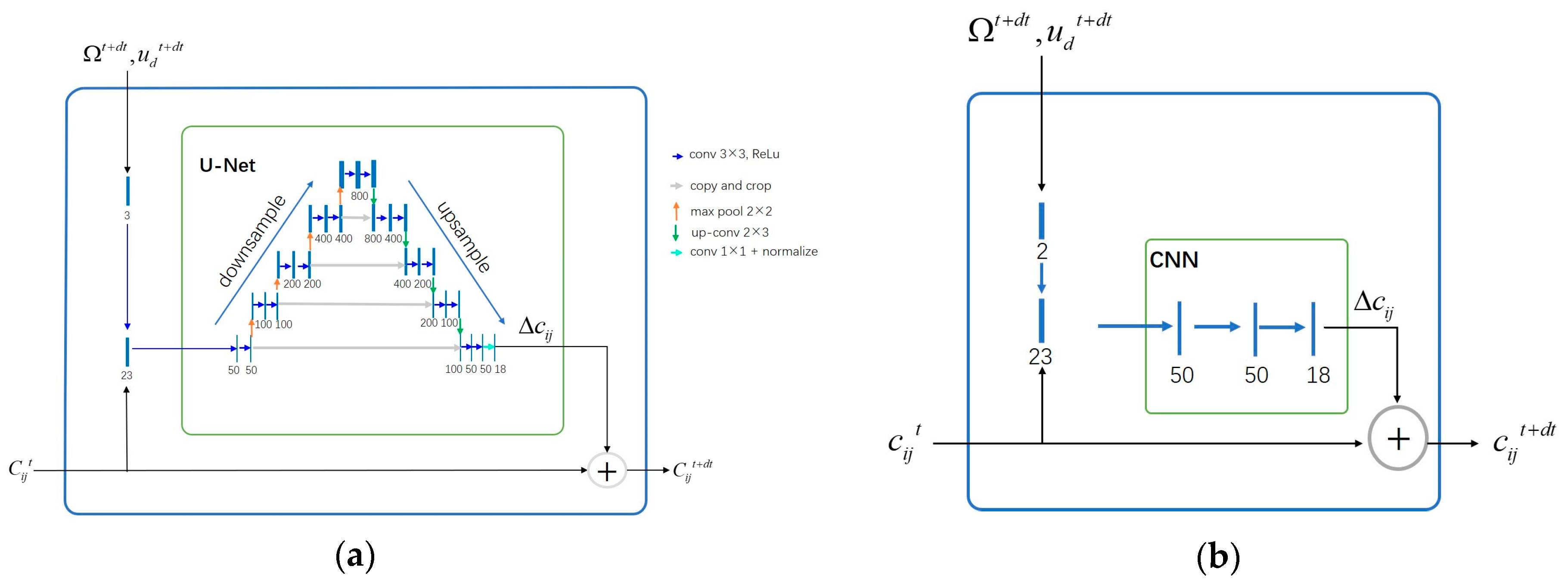
3.4. Neural Network Architecture
- Pipeline
- Training Procedure
- Physics-Informed Loss
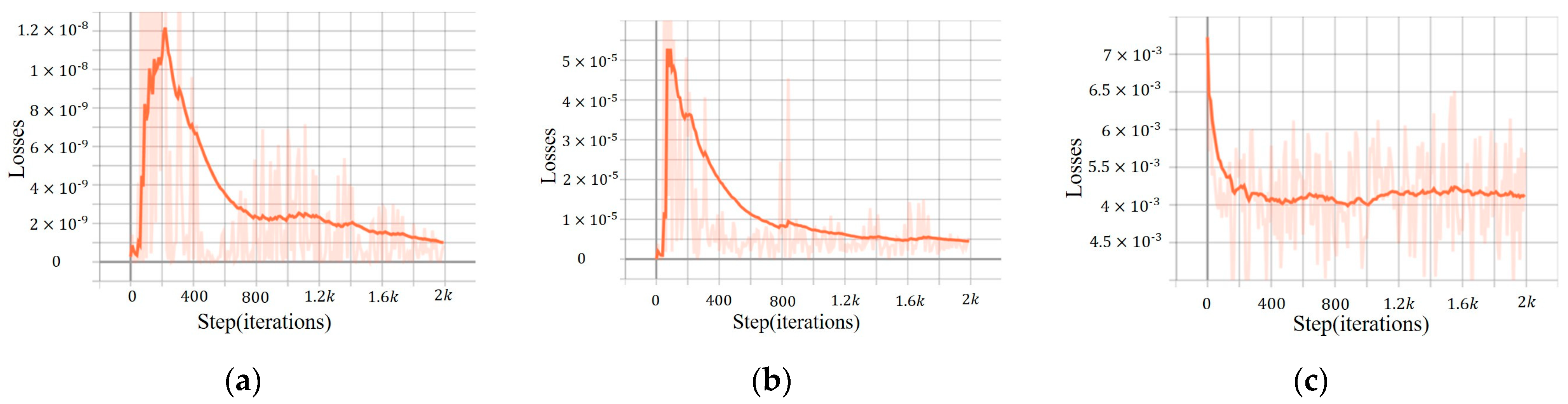
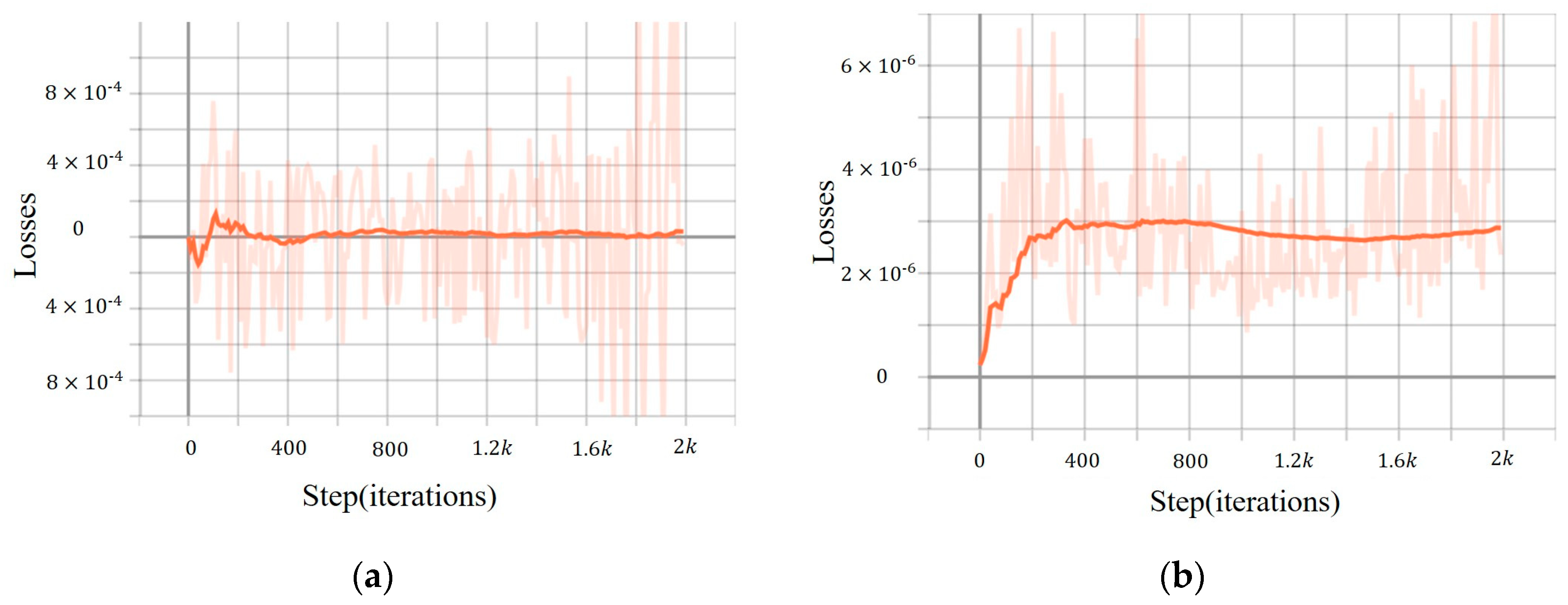
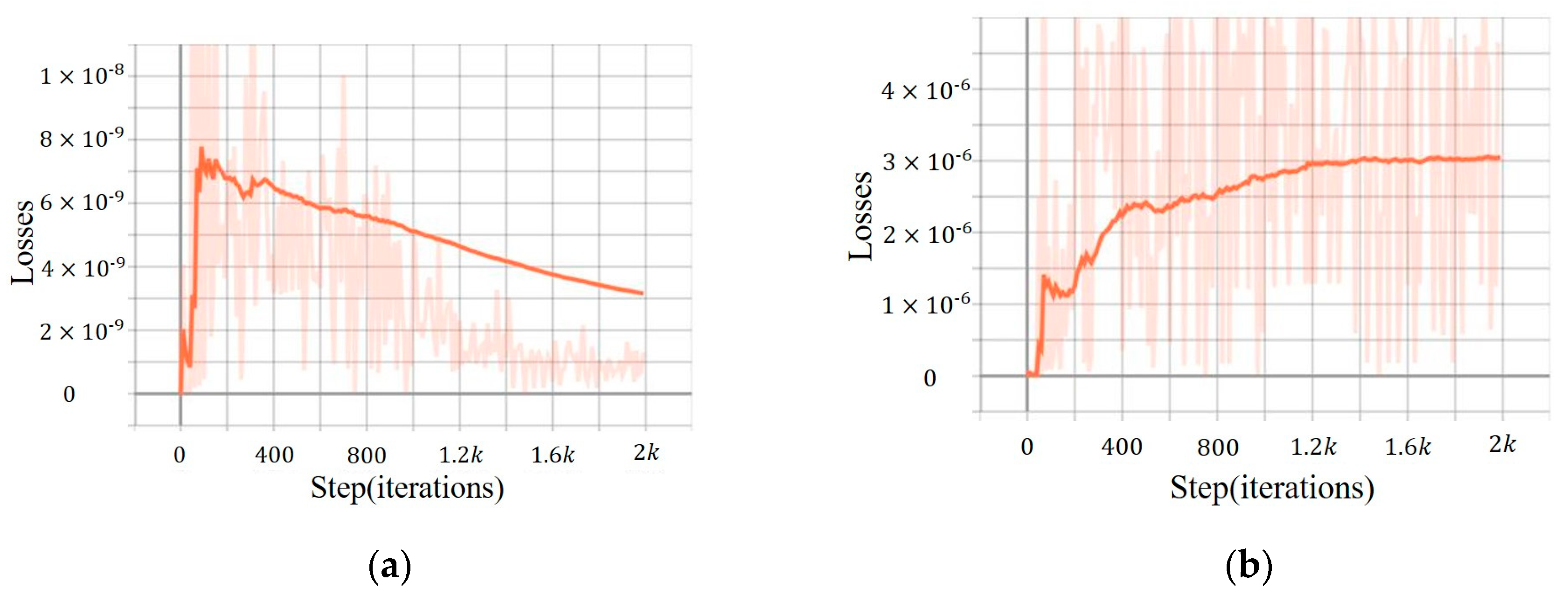
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Zhao, Z.; Tang, Y. An effective few-shot learning approach via location-dependent partial differential equation. Knowl. Inf. Syst. 2020, 62, 1881–1901. [Google Scholar] [CrossRef]
- Eymard, R.; Gallouët, T.; Herbin, R. Finite volume methods. Handb. Numer. Anal. 2000, 7, 713–1018. [Google Scholar]
- Zhang, Y. A finite difference method for fractional partial differential equation. Appl. Math. Comput. 2009, 215, C524–C529. [Google Scholar] [CrossRef]
- Taylor, C.A.; Hughes, T.J.; Zarins, C.K. Finite element modeling of blood flow in arteries. Comput. Methods Appl. Mech. Eng. 1998, 158, 155–196. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Xiu, D. Data-driven deep learning of partial differential equations in modal space. J. Comput. Phys. 2020, 408, 109307. [Google Scholar] [CrossRef]
- Huang, S.; Feng, W.; Tang, C.; Lv, J. Partial Differential Equations Meet Deep Neural Networks: A Survey. arXiv 2022, arXiv:2211.05567. [Google Scholar]
- Khoo, Y.; Lu, J.; Ying, L. Solving parametric PDE problems with artificial neural networks. Eur. J. Appl. Math. 2021, 32, 421–435. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Tartakovsky, A.; Marrero, C.O.; Perdikaris, P.; Tartakovsky, G.; Barajas-Solano, D. Physics-Informed Deep Neural Networks for Learning Parameters and Constitutive Relationships in Subsurface Flow Problems. Water Resour. Res. 2020, 56, e2019WR026731. [Google Scholar] [CrossRef]
- Wandel, N.; Weinmann, M.; Neidlin, M.; Klein, R. Spline-pinn: Approaching pdes without data using fast, physics-informed hermite-spline cnns. Proc. AAAI Conf. Artif. Intell. 2022, 36, 8529–8538. [Google Scholar] [CrossRef]
- Beck, C.; Hutzenthaler, M.; Jentzen, A.; Kuckuck, B. An overview on deep learning-based approximation methods for partial differential equations. Discret. Contin. Dyn. Syst.-Ser. B. 2023, 28, 3697–3746. [Google Scholar] [CrossRef]
- Jin, X.; Cai, S.; Li, H.; Karniadakis, G.E. NSFnets (Navier-Stokes flow nets): Physics-informed neural networks for the incompressible Navier-Stokes equations. J. Comput. Phys. 2021, 426, 109951. [Google Scholar] [CrossRef]
- Wandel, N.; Weinmann, M.; Klein, R. Teaching the incompressible Navier–CStokes equations to fast neural surrogate models in three dimensions. Phys. Fluids 2021, 33, 047117. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Meng, X.; Mao, Z.; Karniadakis, G.E. DeepXDE: A deep learning library for solving differential equations. SIAM Rev. 2021, 63, 208–228. [Google Scholar] [CrossRef]
- Meng, X.; Karniadakis, G.E. A composite neural network that learns from multi-fidelity data: Application to function approximation and inverse PDE problems. J. Comput. Phys. 2020, 401, 109020. [Google Scholar] [CrossRef]
- Lu, L.; Pestourie, R.; Yao, W.; Wang, Z.; Verdugo, F.; Johnson, S.G. Physics-informed neural networks with hard constraints for inverse design. SIAM J. Sci. Comput. 2021, 43, B1105–B1132. [Google Scholar] [CrossRef]
- Cuomo, S.; Di Cola, V.S.; Giampaolo, F.; Raissi, M.; Piccialli, F. Scientific machine learning through physics—Cinformed neural networks: Where we are and what’s next. J. Sci. Comput. 2022, 92, 88. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Lu, L.; Meng, X.; Cai, S.; Mao, Z.; Goswami, S.; Zhang, Z.; Karniadakis, G.E. A comprehensive and fair comparison of two neural operators (with practical extensions) based on fair data. Comput. Methods Appl. Mech. Eng. 2022, 393, 114778. [Google Scholar] [CrossRef]
- Lu, L.; Jin, P.; Karniadakis, G.E. Deeponet: Learning nonlinear operators for identifying differential equations based on the universal approximation theorem of operators. arXiv 2019, arXiv:1910.03193. [Google Scholar]
- Chen, T.; Chen, H. Universal approximation to nonlinear operators by neural networks with arbitrary activation functions and its application to dynamical systems. IEEE Trans. Neural Netw. 1995, 6, 911–917. [Google Scholar] [CrossRef] [PubMed]
- Kovachki, N.; Lanthaler, S.; Mishra, S. On universal approximation and error bounds for Fourier neural operators. J. Mach. Learn. Res. 2021, 22, 13237–13312. [Google Scholar]
- Lu, L.; Jin, P.; Pang, G.; Zhang, Z.; Karniadakis, G.E. Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators. Nat. Mach. Intell. 2021, 3, 218–229. [Google Scholar] [CrossRef]
- Anandkumar, A.; Azizzadenesheli, K.; Bhattacharya, K.; Kovachki, N.; Li, Z.; Liu, B.; Stuart, A. ICLR 2020 Workshop on Integration of Deep Neural Models and Differential Equations. 2020; Available online: https://openreview.net/forum?id=fg2ZFmXFO3 (accessed on 27 February 2020).
- Li, Z.; Kovachki, N.B.; Azizzadenesheli, K.; Bhattacharya, K.; Stuart, A.; Anandkumar, A. Fourier Neural Operator for Parametric Partial Differential Equations. Int. Conf. Learn. Represent. 2020. Available online: https://openreview.net/forum?id=c8P9NQVtmnO (accessed on 8 January 2021).
- Bachman, G.; Narici, L.; Beckenstein, E. Fourier and Wavelet Analysis; Springer: New York, NY, USA, 2000. [Google Scholar]
- Shervani-Tabar, N.; Zabaras, N. Physics-constrained predictive molecular latent space discovery with graph scattering variational autoencoder. arXiv 2020, arXiv:2009.13878. [Google Scholar]
- Gupta, G.; Xiao, X.; Bogdan, P. Multiwavelet-based operator learning for differential equations. Adv. Neural Inf. Process. Syst. 2021, 34, 24048–24062. [Google Scholar]
- Tripura, T.; Chakraborty, S. Wavelet neural operator for solving parametric partial differential equations in computational mechanics problems. Comput. Methods Appl. Mech. Eng. 2023, 404, 115783. [Google Scholar] [CrossRef]
- Zainuddin, Z.; Pauline, O. Modified wavelet neural network in function approximation and its application in prediction of time-series pollution data. Appl. Soft Comput. 2011, 11, 4866–4874. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Ying, S. DWNN: Deep Wavelet Neural Network for Solving Partial Differential Equations. Mathematics 2022, 10, 1976. [Google Scholar] [CrossRef]
- Alpert, B.; Beylkin, G.; Gines, D.; Vozovoi, L. Adaptive solution of partial differential equations in multiwavelet bases. J. Comput. Phys. 2002, 182, 149–190. [Google Scholar] [CrossRef]
- Keinert, F. Wavelets and MultIWAVElets; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Goedecker, S. Wavelets and their application for the solution of Poisson’s and Schrödinger’s equation. Multiscale Simul. Methods Mol. Sci. 2009, 42, 507–534. [Google Scholar]
- Heydari, M.H.; Hooshmandasl, M.R.; Mohammadi, F. Legendre wavelets method for solving fractional partial differential equations with Dirichlet boundary conditions. Appl. Math. Comput. 2014, 234, 267–276. [Google Scholar] [CrossRef]
- Abbas, Z.; Vahdati, S.; Atan, K.A.; Long, N.N. Legendre multi-wavelets direct method for linear integro-differential equations. Appl. Math. Sci. 2009, 3, 693–700. [Google Scholar]
- Fujieda, S.; Takayama, K.; Hachisuka, T. Wavelet convolutional neural networks. arXiv 2018, arXiv:1805.08620. [Google Scholar]
- Zhao, X.; Huang, P.; Shu, X. Wavelet-Attention CNN for image classification. Multimed. Syst. 2022, 28, 915–924. [Google Scholar] [CrossRef]
- Guo, J.; Liu, X.; Li, S.; Wang, Z. Bearing intelligent fault diagnosis based on wavelet transform and convolutional neural network. Shock. Vib. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- Onjun, R.; Sriwichai, K.; Dungkratoke, N.; Kaennakham, S. Wavelet Pooling Scheme in the Convolution Neural Network (CNN) for Breast Cancer Detection. In Machine Learning and Artificial Intelligence; IOS Press: Amsterdam, The Netherlands, 2022; pp. 72–77. [Google Scholar]
- Wolter, M.; Garcke, J. Adaptive wavelet pooling for convolutional neural networks. In Proceedings of the International Conference on Artificial Intelligence and Statistics, Virtual, 13–15 April 2021; pp. 1936–1944. [Google Scholar]
- Zauderer, E. Partial Differential Equations of Applied Mathematics; John Wiley & Sons.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Fischer, A.; Igel, C. An introduction to restricted Boltzmann machines. In Proceedings of the Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications: 17th Iberoamerican Congress, CIARP 2012, Buenos Aires, Argentina, 3–6 September 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 14–36. [Google Scholar]
- Grafakos, L. Classical and Modern Fourier Analysis; Springer: New York, NY, USA, 2004. [Google Scholar]
- Li, B.; Chen, X. Wavelet-based numerical analysis: A review and classification. Finite Elem. Anal. Design 2014, 81, 14–31. [Google Scholar] [CrossRef]
- Zhu, Y.; Zabaras, N.; Koutsourelakis, P.S.; Perdikaris, P. Physics-constrained deep learning for high-dimensional surrogate modeling and uncertainty quantification without labeled data. J. Comput. Phys. 2019, 394, 56–81. [Google Scholar] [CrossRef]
- Alpert, B.K. A class of bases in L 2 for the sparse representation of integral operators. SIAM J. Math. Anal. 1993, 24, 246–262. [Google Scholar] [CrossRef]
- Agarwal, R.P.; O’ Regan, D. Legendre polynomials and functions. In Ordinary and Partial Differential Equations: With Special Functions, Fourier Series, and Boundary Value Problems; Springer Science & Business Media: New York, NY, USA, 2009; pp. 47–56. [Google Scholar]
- Mei, L.; Wu, B.; Lin, Y. Shifted-Legendre orthonormal method for high-dimensional heat conduction equations. AIMS Math. 2022, 7, 9463–9478. [Google Scholar] [CrossRef]
- Chatrabgoun, O.; Parham, G.; Chinipardaz, R. A Legendre multiwavelets approach to copula density estimation. Stat. Pap. 2017, 58, 673–690. [Google Scholar] [CrossRef]
- Khellat, F.; Yousefi, S.A. The linear Legendre mother wavelets operational matrix of integration and its application. J. Frankl. Inst. 2006, 343, 181–190. [Google Scholar] [CrossRef]
- Hellwig, G. Partial Differential Equations: An Introduction; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Zhang, R.; Lin, Y. A new algorithm of boundary value problems based on improved wavelet basis and the reproducing kernel theory. Math. Methods Appl. Sci. 2023, 1–11. [Google Scholar] [CrossRef]
- Liu, Y.; Fu, P.; Liu, W.; Lin, D. Lecture Notes on Mathematical Analysis, 4th ed.; Higher Education Press: Beijing, China, 2003. [Google Scholar]
- Yamada, M. Wavelets: Applications. Encycl. Math. Phys. 2006, 420–426. [Google Scholar] [CrossRef]
- Bedford, T.; Daneshkhah, A.; Wilson, K.J. Approximate uncertainty modeling in risk analysis with vine copulas. Risk Anal. 2016, 36, 792–815. [Google Scholar] [CrossRef]
- The CFD Benchmarking Project. 2021. Available online: http://www.mathematik.tu-dortmund.de/~featflow/en/benchmarks/cfdbenchmarking.html (accessed on 8 September 2021).
- Wang, Y.; Wang, W.; Mei, L.; Lin, Y.; Sun, H. An ε-Approximate Approach for Solving Variable-Order Fractional Differential Equations. Fractal Fract. 2023, 7, 90. [Google Scholar] [CrossRef]
- Saleh, M.; Nagy, Á.; Kovács, E. Construction and investigation of new numerical algorithms for the heat equation: Part III. Multidiszciplináris Tudományok 2020, 10, 349–360. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | ||||
|---|---|---|---|---|
| Spline Net [11] | 8.511 | 1.127 | 1.425 | |
| 5.294 | 6.756 | 1.356 | ||
| PiLMWs-CNN (ours) | 5.366 | 1.863 | 1.024 | |
| Methods | ||
|---|---|---|
| implicit PINN | 1.855 | 1.465 |
| Spline Net [11] | 7.492 | 9.04 |
| PiLMWs-CNN (ours) | 5.967 | 2.506 |
| 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | ||
|---|---|---|---|---|---|---|
| 0.1 | 7.414 | 1.963 | 2.421 | 1.963 | 7.414 | |
| 0.3 | 1.963 | 5.130 | 6.347 | 5.130 | 1.963 | |
| 0.5 | 2.421 | 6.347 | 7.839 | 6.347 | 2.421 | |
| 0.7 | 1.963 | 5.130 | 6.347 | 5.130 | 1.963 | |
| 0.9 | 7.414 | 1.963 | 2.421 | 1.963 | 7.414 | |
| 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | ||
| 0.1 | 3.822 | 3.780 | 3.765 | 3.780 | 3.822 | |
| 0.3 | 3.780 | 3.672 | 3.631 | 3.672 | 3.780 | |
| 0.5 | 3.765 | 3.631 | 3.580 | 3.631 | 3.765 | |
| 0.7 | 3.780 | 3.672 | 3.631 | 3.672 | 3.780 | |
| 0.9 | 3.822 | 3.780 | 3.765 | 3.780 | 3.555 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, W.; Yu, C.; Sun, H.; Zhang, R. Approximating Partial Differential Equations with Physics-Informed Legendre Multiwavelets CNN. Fractal Fract. 2024, 8, 91. https://doi.org/10.3390/fractalfract8020091
Wang Y, Wang W, Yu C, Sun H, Zhang R. Approximating Partial Differential Equations with Physics-Informed Legendre Multiwavelets CNN. Fractal and Fractional. 2024; 8(2):91. https://doi.org/10.3390/fractalfract8020091
Chicago/Turabian StyleWang, Yahong, Wenmin Wang, Cheng Yu, Hongbo Sun, and Ruimin Zhang. 2024. "Approximating Partial Differential Equations with Physics-Informed Legendre Multiwavelets CNN" Fractal and Fractional 8, no. 2: 91. https://doi.org/10.3390/fractalfract8020091
APA StyleWang, Y., Wang, W., Yu, C., Sun, H., & Zhang, R. (2024). Approximating Partial Differential Equations with Physics-Informed Legendre Multiwavelets CNN. Fractal and Fractional, 8(2), 91. https://doi.org/10.3390/fractalfract8020091