
On Observer and Controller Design for Nonlinear Hadamard Fractional-Order One-Sided Lipschitz Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- •
- It provides greater flexibility in handling nonlinearities due to the one-sided Lipschitz condition.
- •
- It expands the range of fractional-order systems analyzed by focusing on Hadamard derivatives.
- •
- •
- Novel Observer and Controller Design: We propose a new method for designing both a state feedback controller and an observer for nonlinear Hadamard fractional-order systems. This approach ensures the Mittag-Leffler stability of the system states, extending classical control methods to fractional-order systems with complex dynamics.
- •
- Extension of the Lipschitz Condition: The research adapts the classical Lipschitz condition to the one-sided Lipschitz condition, significantly broadening the range of systems that can be analyzed and controlled. This modification allows for greater flexibility and applicability to real-world systems with larger Lipschitz constants.
- •
- Application to Hadamard Fractional Derivatives: Unlike many existing works focused on Caputo or Riemann–Liouville derivatives, this work specifically addresses Hadamard fractional derivatives, providing insights and solutions that are more applicable to systems with long-term memory effects.
- •
- Numerical Validation: The theoretical findings are validated through several numerical examples, demonstrating the robustness and effectiveness of the proposed observer and controller designs in stabilizing nonlinear systems.
2. Preliminaries and Problem Statement
2.1. Preliminaries
2.2. Problem Statement
3. State Feedback Stabilization
4. Observer Design
5. Observer-Based Controller Design
6. Numerical Examples
- •
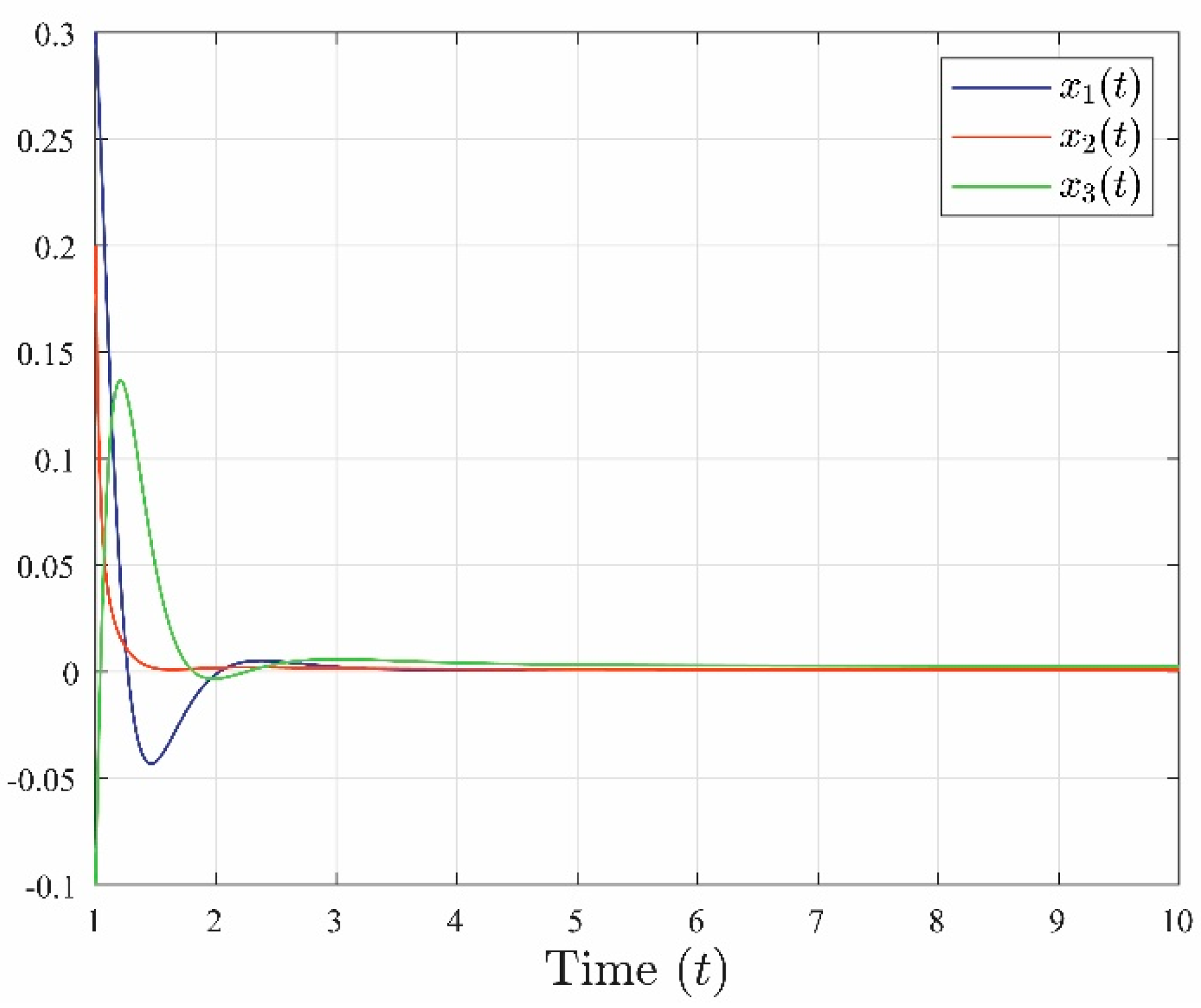
- Example 1 validates the theoretical findings of Theorem 1 by applying the proposed state feedback stabilization method to a nonlinear system with a given set of initial conditions and nonlinearity.
- •
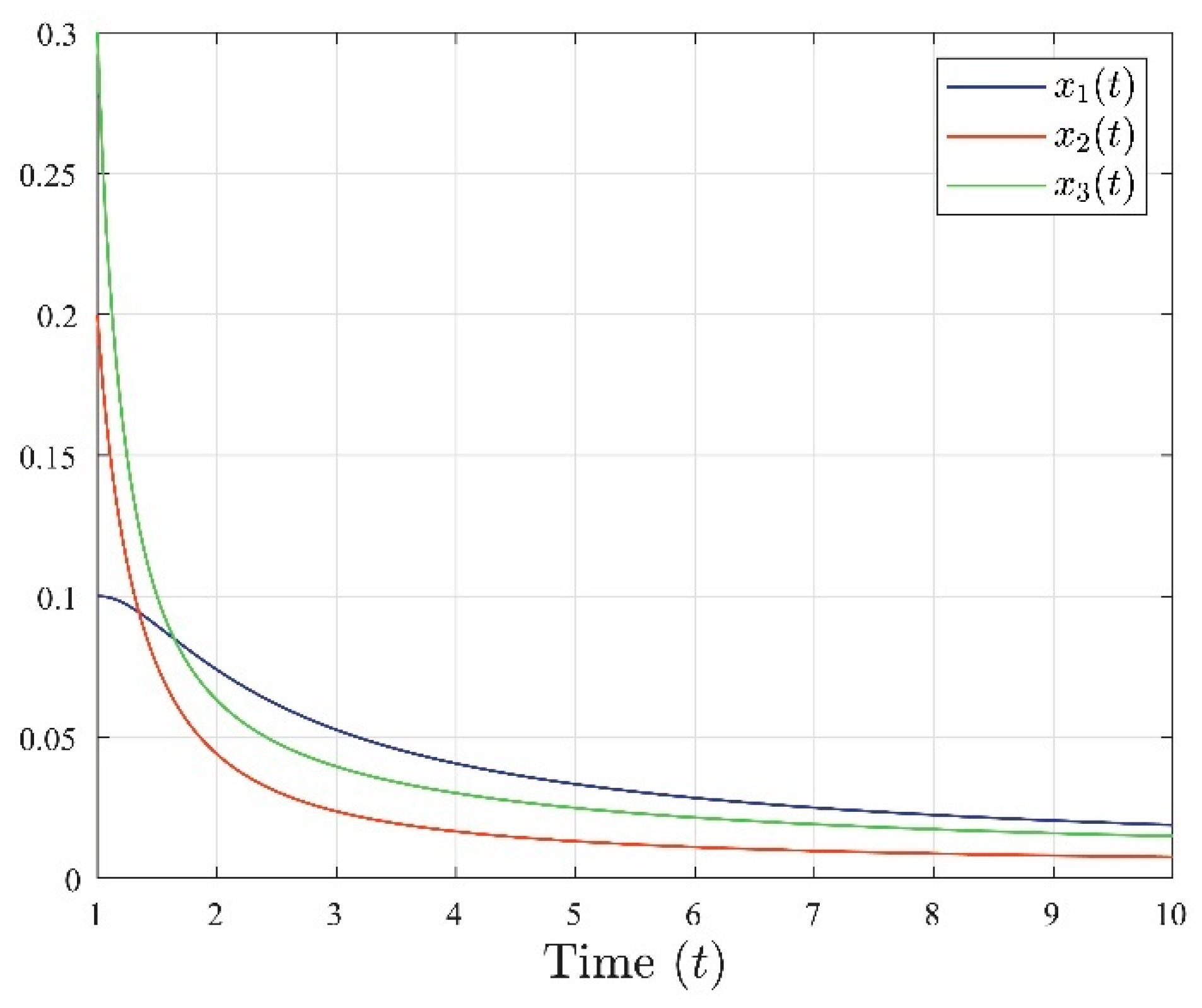
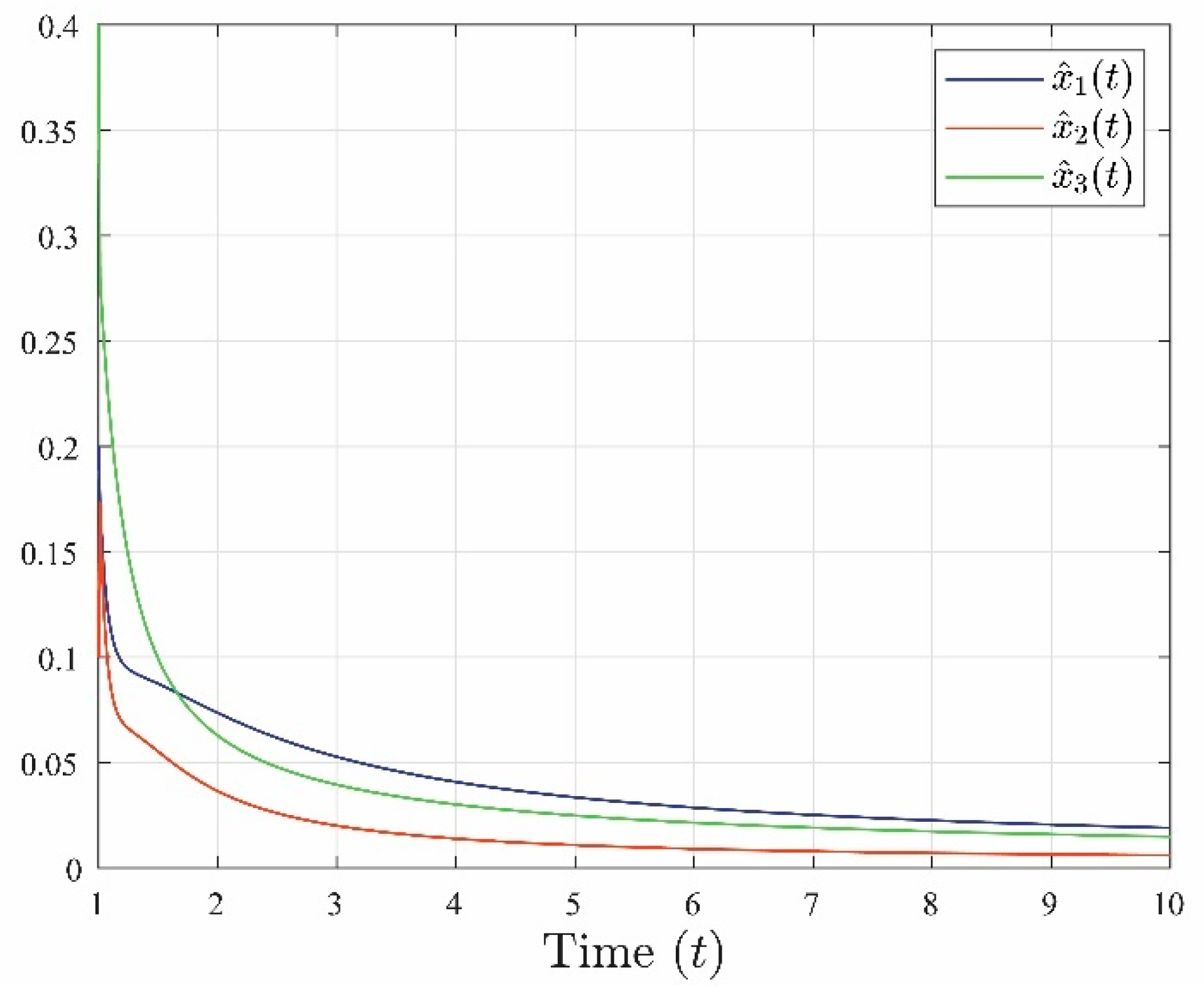
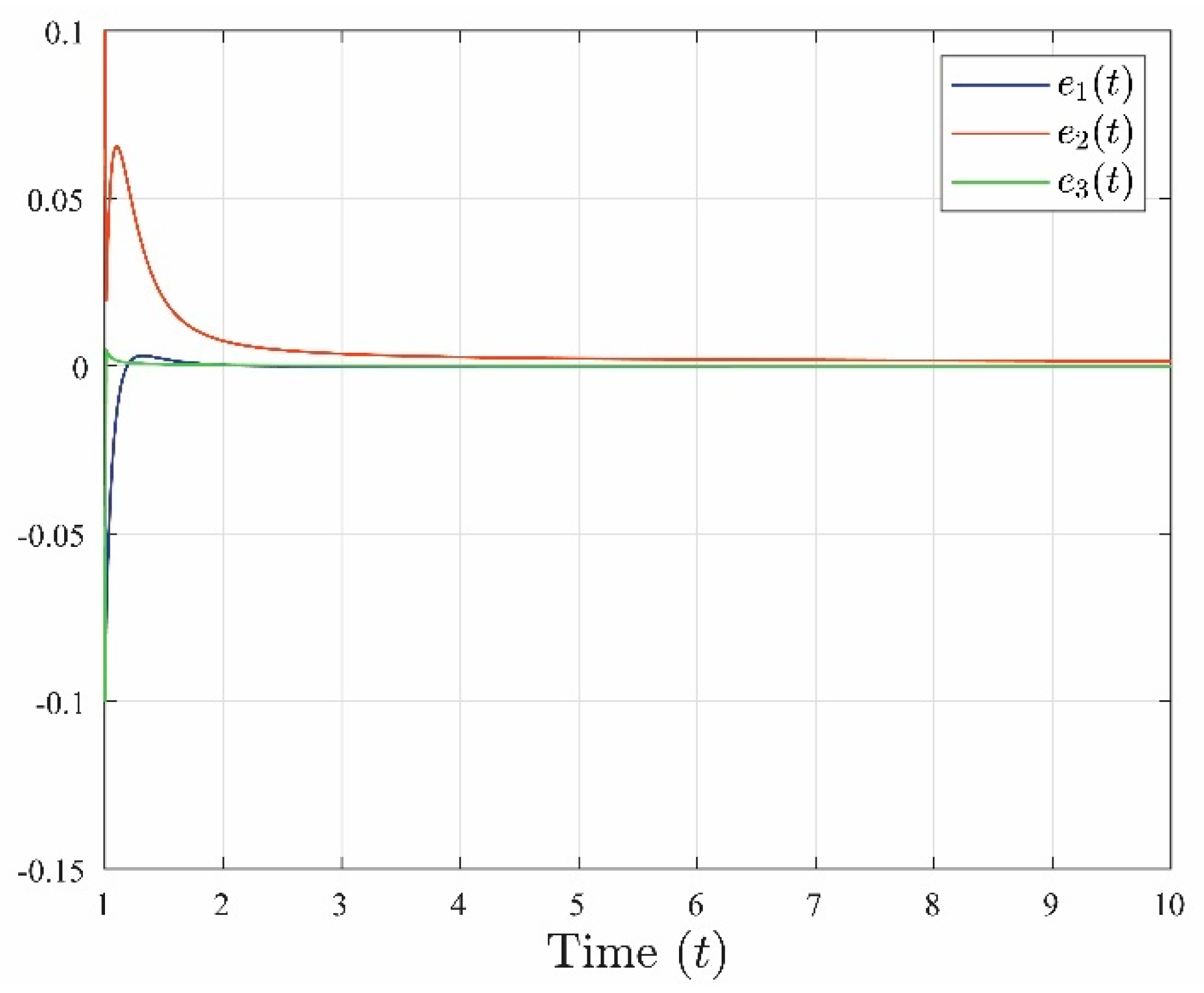
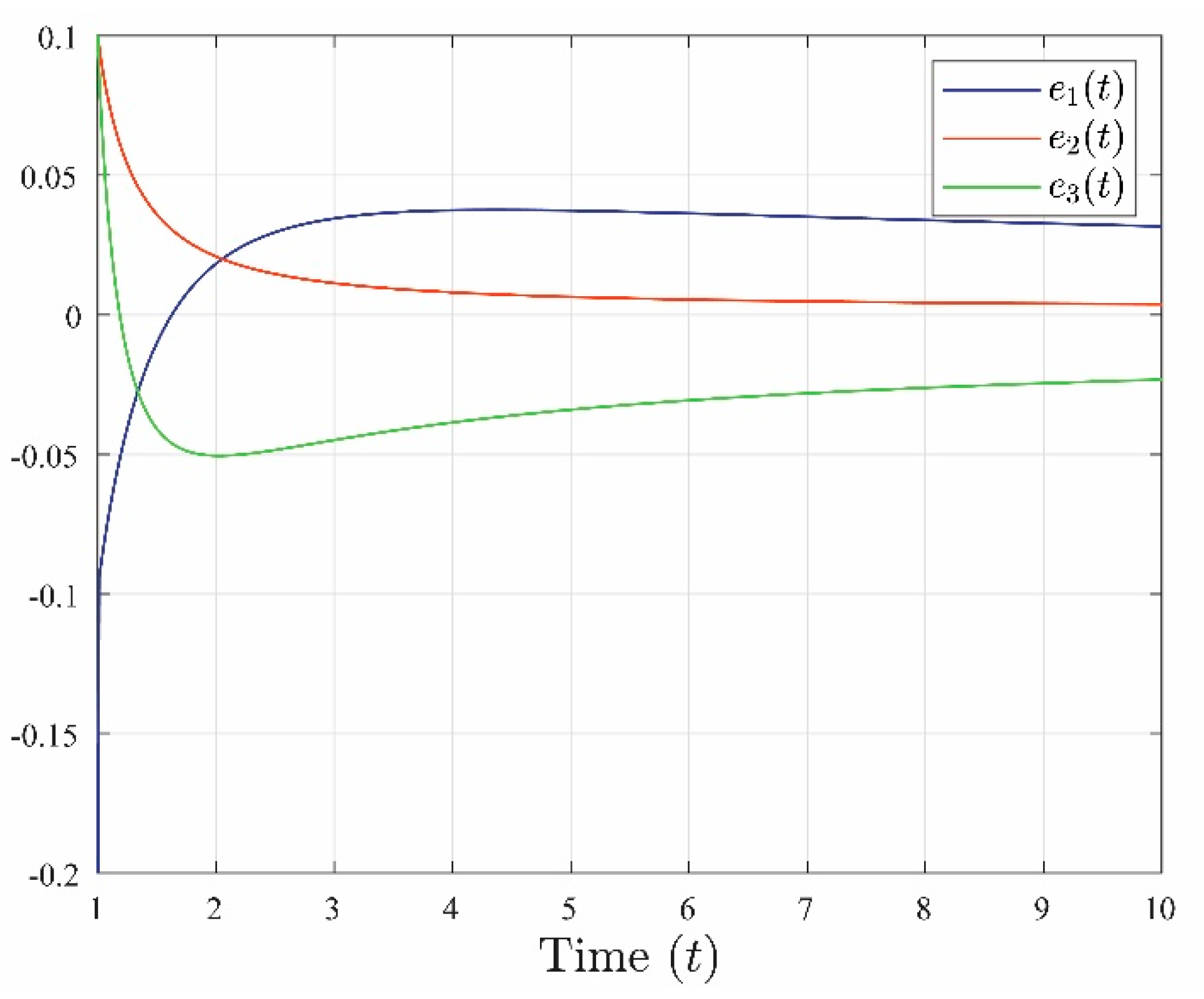
- Example 2 demonstrates the applicability of the observer design from Theorem 2, showing how the system’s estimated states closely track the actual states.
- •
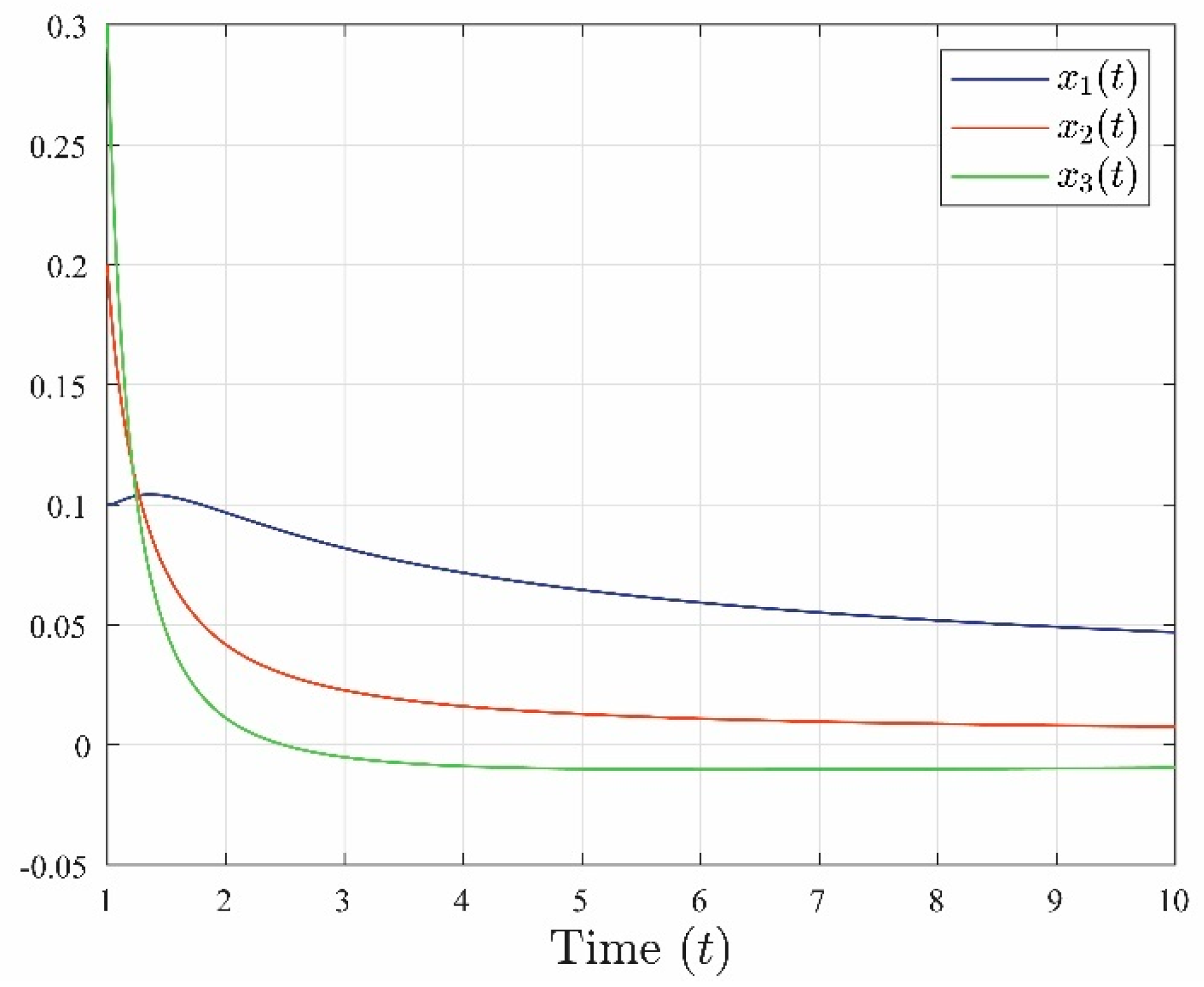
- Example 3 extends the approach to an observer-based controller design, illustrating the effectiveness of the combined observer and controller in ensuring Mittag-Leffler stability for the system.
6.1. Example 1
6.2. Example 2
6.3. Example 3
7. Design Algorithm and Discussion
- •
- Step 1: The gain matrices and are chosen such that is a Hurwitz matrix and is a Hurwitz matrix.
- •
- Step 2: Solve the LMI stability condition of Theorem 2 to find the observer gain matrix .
- •
- Step 3: The controller stability condition (23) is a Nonlinear Matrix Inequality (NMI). It should be transformed into an LMI, as performed in simulation example 3, just above (LMI (28)).
- •
- Step 4: Chose a value for the variable , such that the stability condition (25) is well satisfied.
- •
- Step 5: Solve the LMI (28), and obtain the control gain matrix .
- •
- Step 6: Use these results to develop the MATLAB simulation code, and obtain the simulation figures.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Benbouhenni, H.; Bizon, N.; Mosaad, M.I.; Colak, I.; Djilali, A.B.; Gasmi, H. Enhancement of the power quality of DFIG-based dual-rotor wind turbine systems using fractional order fuzzy controller. Expert Syst. Appl. 2024, 238, 121695. [Google Scholar] [CrossRef]
- Singh, J.; Agrawal, R.; Baleanu, D. Dynamical analysis of fractional order biological population model with carrying capacity under Caputo-Katugampola memory. Alex. Eng. J. 2024, 91, 394–402. [Google Scholar] [CrossRef]
- Li, J.; Yan, Z.; Shi, X.; Luo, X. Distributed Adaptive Formation Control for Fractional-Order Multi-Agent Systems with Actuator Failures and Switching Topologies. Fractal Fract. 2024, 8, 563. [Google Scholar] [CrossRef]
- Sharafian, A.; Ali, A.; Ullah, I.; Khalifa, T.R.; Bai, X.; Qiu, L. Fuzzy adaptive control for consensus tracking in multiagent systems with incommensurate fractional-order dynamics: Application to power systems. Inf. Sci. 2024, 689, 121455. [Google Scholar] [CrossRef]
- Liu, H.; He, L.; Cheng, B. A Powerless Fractional-Order WPT System With Extended Zero Voltage Switching Region. IEEE Trans. Ind. Electron. 2024, 1–9. [Google Scholar] [CrossRef]
- Liu, H.; He, L.; Cheng, B. Powerless Fractional-Order Tuning Wireless Power Transfer System With Zero Phase Angle Input. IEEE Trans. Circuits Syst. I Regul. Pap. 2024, 1–10. [Google Scholar] [CrossRef]
- Zhou, H.; He, L.; Yang, Z.; Lin, Z. Virtual Fractional-Order-Inductor Based Second Harmonic Current Suppression Method. IEEE Trans. Ind. Electron. 2023, 1–11. [Google Scholar] [CrossRef]
- Zhou, H.; He, L.; Lu, F. Impedance Editing Based Second Harmonic Current Reduction for New Energy Access System. IEEE Trans. Ind. Electron. 2023, 71, 2638–2649. [Google Scholar] [CrossRef]
- Ma, L. On the kinetics of Hadamard-type fractional differential systems. Fract. Calc. Appl. Anal. 2020, 23, 553–570. [Google Scholar] [CrossRef]
- Ma, L.; Li, C. On hadamard fractional calculus. Fractals 2017, 25, 1750033. [Google Scholar] [CrossRef]
- He, B.B.; Zhou, H.C. Caputo-Hadamard fractional Halanay inequality. Appl. Math. Lett. 2022, 125, 107723. [Google Scholar] [CrossRef]
- Singh, A.P.; Bingi, K. Applications of Fractional-Order Calculus in Robotics. Fractal Fract. 2024, 8, 403. [Google Scholar] [CrossRef]
- Prabhakaran, A.; Ponnusamy, T.; Janarthanan, G. Optimized fractional order PID controller with sensorless speed estimation for torque control in induction motor. Expert Syst. Appl. 2024, 249, 123574. [Google Scholar] [CrossRef]
- Mseddi, A.; Wali, K.; Abid, A.; Naifar, O.; Rhaima, M.; Mchiri, L. Advanced modeling and control of wind conversion systems based on hybrid generators using fractional order controllers. Asian J. Control 2024, 26, 1103–1119. [Google Scholar] [CrossRef]
- Mseddi, A.; Abid, A.; Naifar, O.; Rhaima, M.; Ben Makhlouf, A.; Mchiri, L. Investigation of the Robust Fractional Order Control Approach Associated with the Online Analytic Unity Magnitude Shaper: The Case of Wind Energy Systems. Fractal Fract. 2024, 8, 187. [Google Scholar] [CrossRef]
- Naifar, O.; Nagy, A.M.; Makhlouf, A.B.; Kharrat, M.; Hammami, M.A. Finite-time stability of linear fractional-order time-delay systems. Int. J. Robust Nonlinear Control 2019, 29, 180–187. [Google Scholar] [CrossRef]
- Lu, Q.; Zhu, Y. Finite-time stability in measure for nabla uncertain discrete linear fractional order systems. Math. Sci. 2024, 18, 55–62. [Google Scholar] [CrossRef]
- Borthagaray, J.P.; Li, W.; Nochetto, R.H. Quasi-linear Fractional-Order Operators in Lipschitz Domains. SIAM J. Math. Anal. 2024, 56, 4006–4039. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Gallegos, J.A. Error-Based Switched Fractional Order Model Reference Adaptive Control for MIMO Linear Time Invariant Systems. Fractal Fract. 2024, 8, 109. [Google Scholar] [CrossRef]
- N’doye, I.; Laleg-Kirati, T.M.; Darouach, M.; Voos, H. Adaptive observer for nonlinear fractional-order systems. Int. J. Adapt. Control Signal Process. 2017, 31, 314–331. [Google Scholar] [CrossRef]
- Naifar, O.; Assaad, J.; Ben Makhlouf, A. Non-fragile H∞ observer for Lipschitz conformable fractional-order systems. Asian J. Control 2022, 24, 2202–2212. [Google Scholar] [CrossRef]
- Thuan, M.V.; Huong, D.C.; Sau, N.H.; Ha, Q.T. Unknown input fractional-order functional observer design for one-side Lipschitz time-delay fractional-order systems. Trans. Inst. Meas. Control 2019, 41, 4311–4321. [Google Scholar] [CrossRef]
- Alsharif, A.O.M.; Jmal, A.; Naifar, O.; Ben Makhlouf, A.; Rhaima, M.; Mchiri, L. Unknown Input Observer Scheme for a Class of Nonlinear Generalized Proportional Fractional Order Systems. Symmetry 2023, 15, 1233. [Google Scholar] [CrossRef]
- Alsharif, A.O.M.; Jmal, A.; Naifar, O.; Ben Makhlouf, A.; Rhaima, M.; Mchiri, L. State Feedback Controller Design for a Class of Generalized Proportional Fractional Order Nonlinear Systems. Symmetry 2023, 15, 1168. [Google Scholar] [CrossRef]
- Issaoui, R.; Naifar, O.; Tlija, M.; Mchiri, L.; Ben Makhlouf, A. Practical Stability of Observer-Based Control for Nonlinear Caputo–Hadamard Fractional-Order Systems. Fractal Fract. 2024, 8, 531. [Google Scholar] [CrossRef]
- He, B.-B.; Zhou, H.-C.; Kou, C.-H. Stability analysis of Hadamard and Caputo-Hadamard fractional nonlinear systems without and with delay. Fract. Calc. Appl. Anal. 2022, 25, 2420–2445. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jmal, A.; Naifar, O.; Rhaima, M.; Ben Makhlouf, A.; Mchiri, L. On Observer and Controller Design for Nonlinear Hadamard Fractional-Order One-Sided Lipschitz Systems. Fractal Fract. 2024, 8, 606. https://doi.org/10.3390/fractalfract8100606
Jmal A, Naifar O, Rhaima M, Ben Makhlouf A, Mchiri L. On Observer and Controller Design for Nonlinear Hadamard Fractional-Order One-Sided Lipschitz Systems. Fractal and Fractional. 2024; 8(10):606. https://doi.org/10.3390/fractalfract8100606
Chicago/Turabian StyleJmal, Assaad, Omar Naifar, Mohamed Rhaima, Abdellatif Ben Makhlouf, and Lassaad Mchiri. 2024. "On Observer and Controller Design for Nonlinear Hadamard Fractional-Order One-Sided Lipschitz Systems" Fractal and Fractional 8, no. 10: 606. https://doi.org/10.3390/fractalfract8100606
APA StyleJmal, A., Naifar, O., Rhaima, M., Ben Makhlouf, A., & Mchiri, L. (2024). On Observer and Controller Design for Nonlinear Hadamard Fractional-Order One-Sided Lipschitz Systems. Fractal and Fractional, 8(10), 606. https://doi.org/10.3390/fractalfract8100606