4.2. Speed Loop
The controlled plant of the speed loop is represented by (
29), with
,
, and
. The design specifications for the speed loop included
rad/s,
rad/s,
,
rad/s, and
dB. Subsequently, the MESO for the speed loop could be designed.
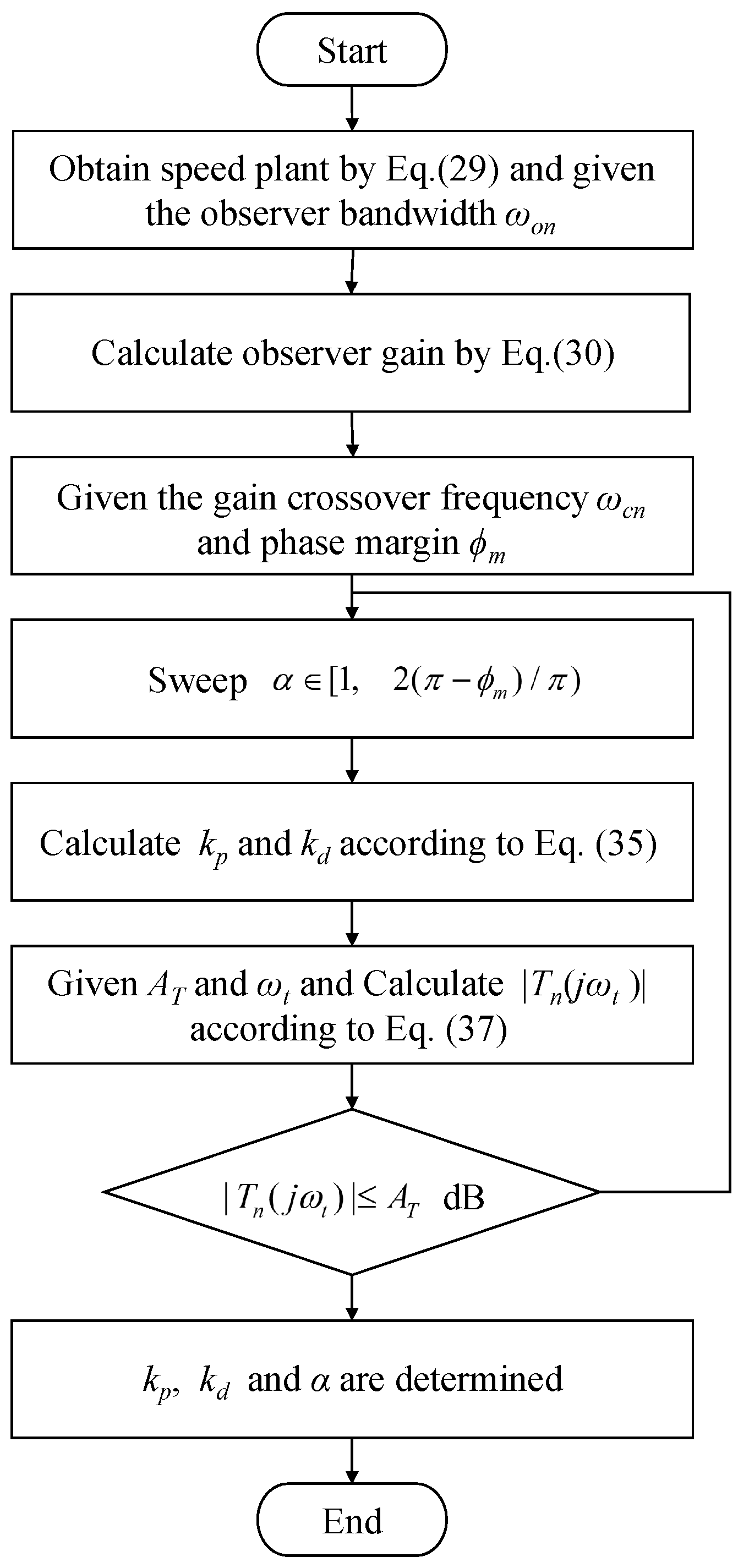
Considering
, the fractional order bound for FOPD can be calculated as
. By sweeping
within this range, the parameters
and
can be determined using (
35). The parameter curve for FOPD is illustrated in
Figure 6a. As
approaches its upper bound,
increases rapidly. The gain of
at
can be calculated using (
37). The curve of
with respect to
is depicted in
Figure 6b. It indicates that the gain in
increases with a rising
, leading to a gradual decrease in the noise suppression ability. For
, the constraint in (
37) is satisfied. Hence,
was selected to achieve better disturbance rejection performance.
The PD-LESO and PD-MESO controllers were also designed for comparison using the same design specifications. The parameters of the design controllers for the speed loop are shown in
Table 3.
(1) Disturbance rejection and noise suppression for the ESO: When the estimation error is defined as
, the dynamics of the estimation error can be obtained using (
5) and (
6) as follows:
where
n is the sensor noise. By applying the Laplace transform to (
44), the transfer function from
d to
(
) can be obtained as follows:
The transfer function from
n to
can be derived as follows:
where
.
and
are used to evaluate the MESO’s disturbance rejection and noise sensitivity, respectively. Therefore,
and
for the speed loop can be obtained as follows:
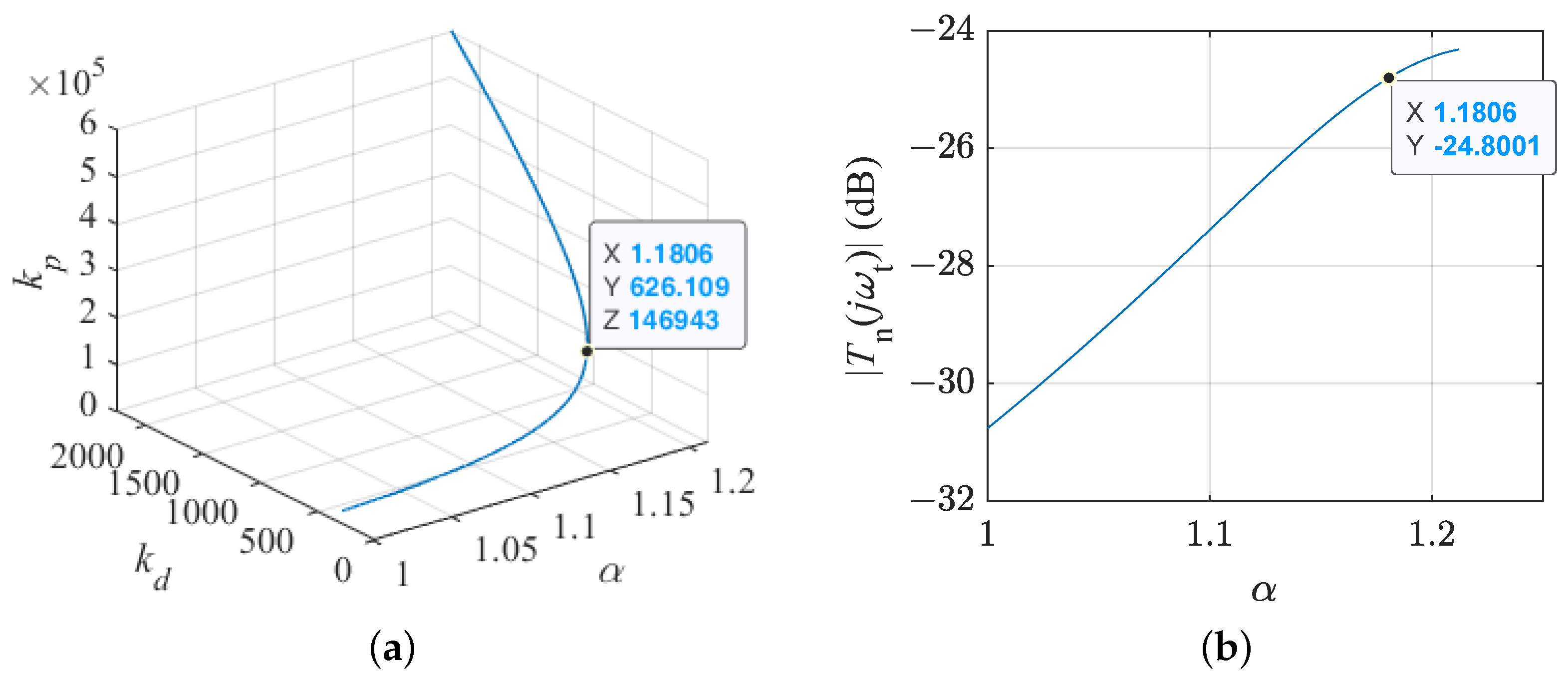
The Bode plots of
and
are depicted in
Figure 7a,b. With the same observer bandwidth
,
Figure 7 illustrates that the MESO exhibits superior disturbance estimation performance compared to the LESO, while both maintain the same noise suppression performance. The disturbance estimation performance of the LESO improves as
increases, but the noise suppression performance decreases simultaneously.
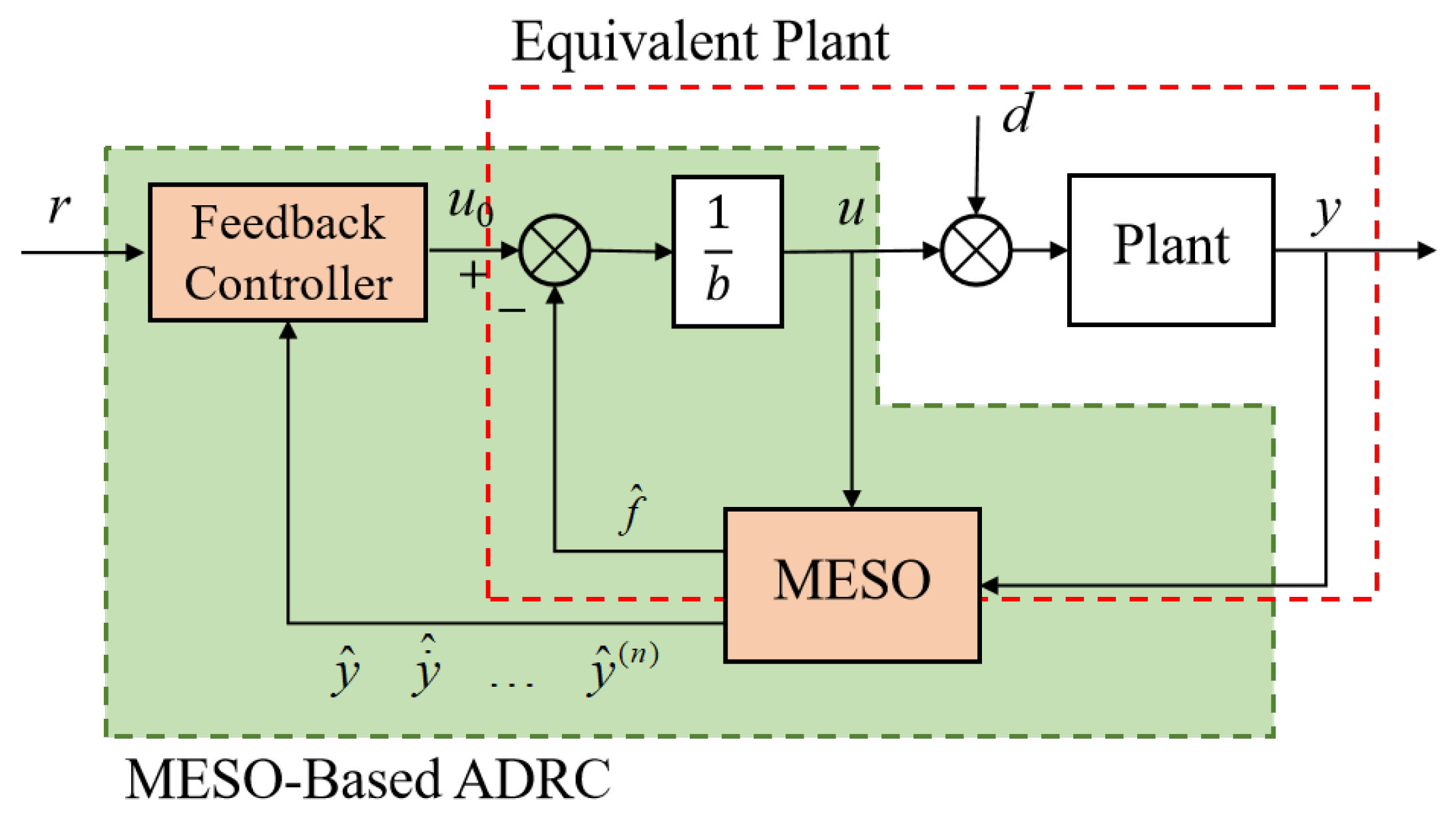
Remark 4. Since the MESO incorporates the plant information as the known part of the total disturbance, the burden of MESO tracking f is lower compared to the traditional LESO. It is well known that the selection of observer bandwidth involves a trade-off between disturbance estimation and noise sensitivity. Therefore, the MESO alleviates this conflict and achieves better disturbance estimation and noise suppression performance simultaneously compared to the LESO under a limited observer bandwidth.
(2) The equivalent plant: The Bode plots of the equivalent plant are presented in
Figure 8. It shows that the MESO-based equivalent plant is identical to the nominal plant, represented as
. However, the LESO-based equivalent plant differs significantly from the nominal plant. Although the differences between the equivalent plant and the nominal plant decrease as
increases, the LESO becomes more sensitive to noise at a high
.
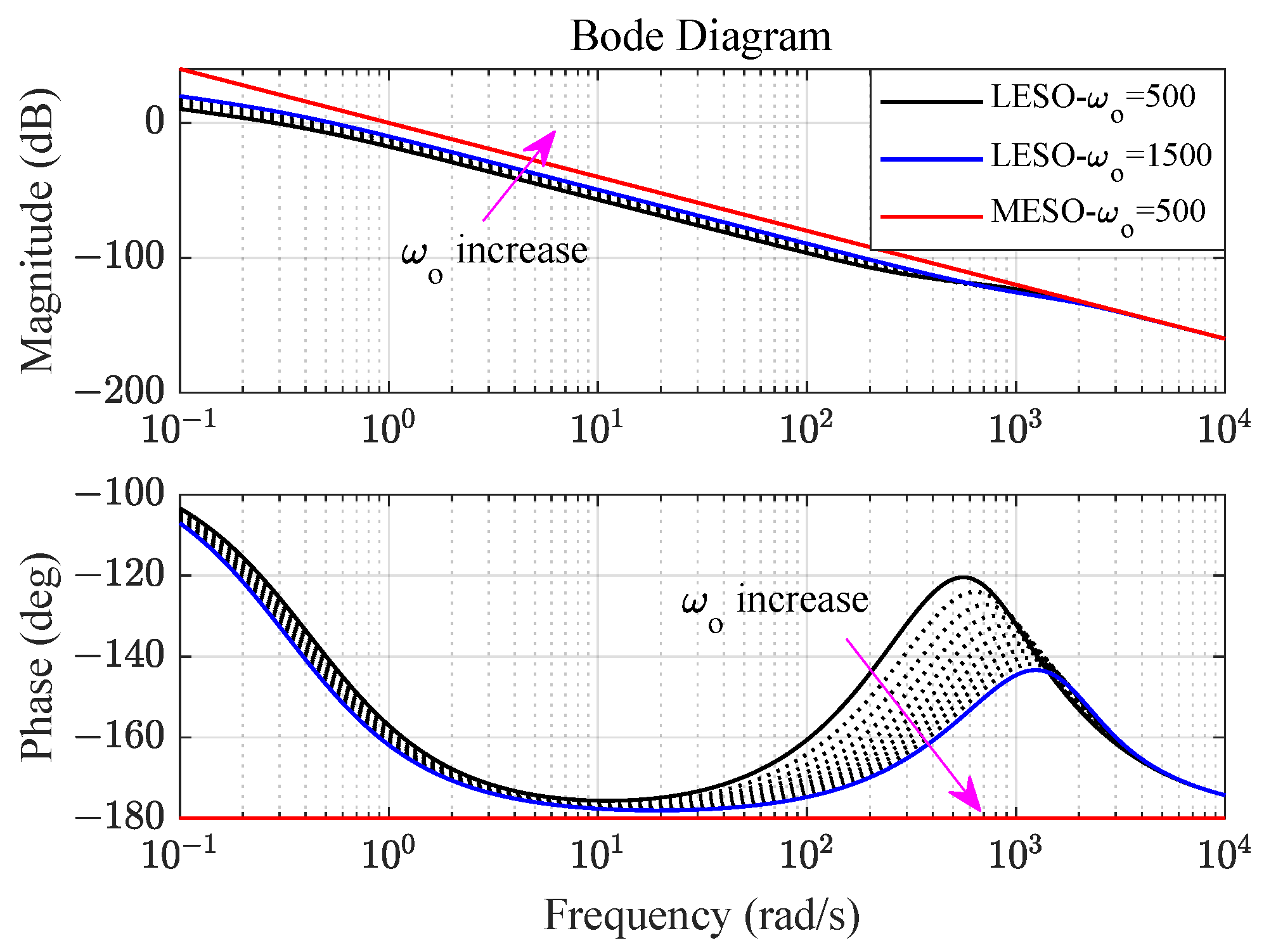
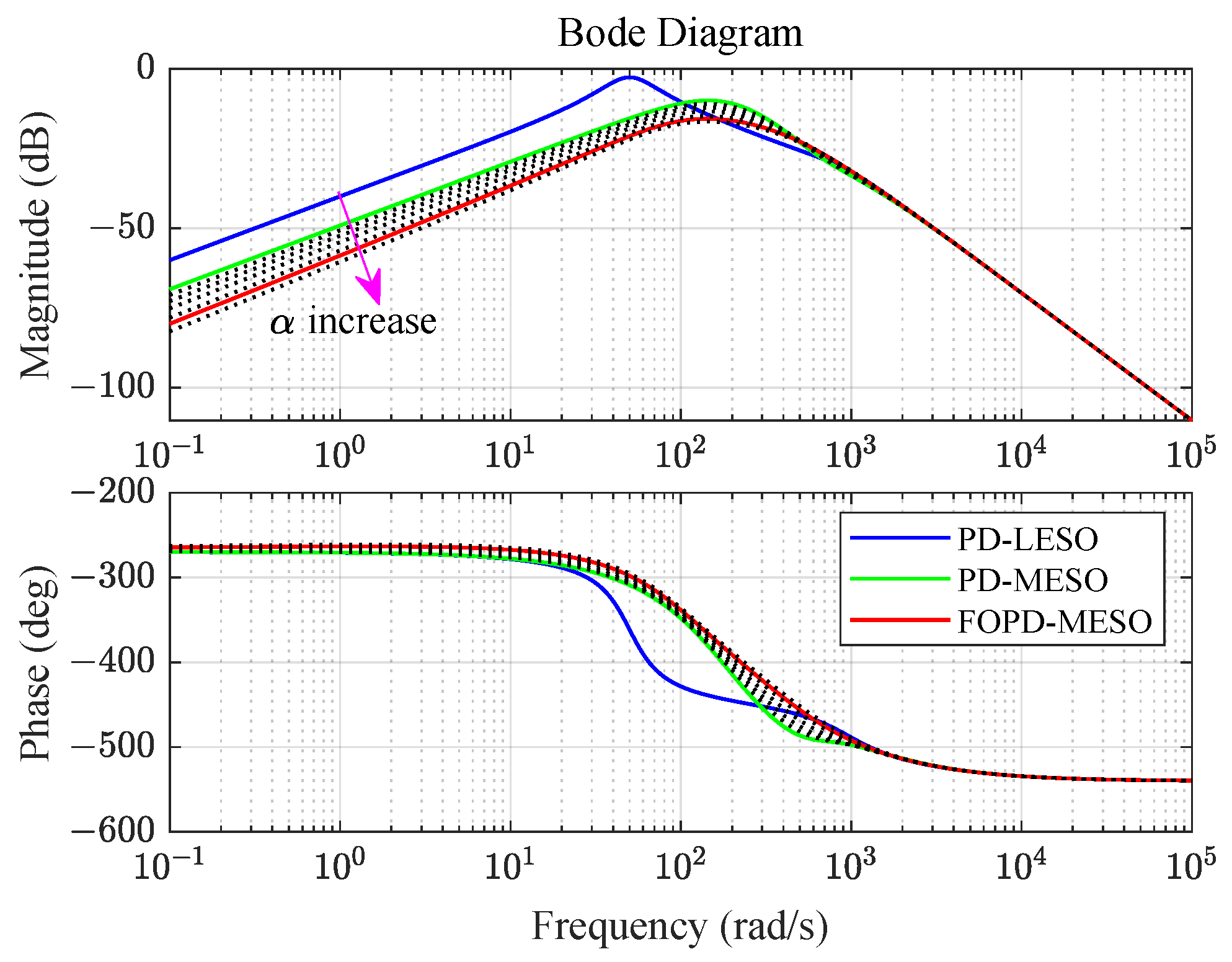
(3) Open-loop Bode plots: Open-loop Bode plots are illustrated in
Figure 9a. It is evident from the plots that the designed PD-MESO and FOPD-MESO met the design specifications, whereas the PD-LESO did not. Due to the significant difference between the LESO-based equivalent plant and the nominal plant, the designed PD feedback controller based on the nominal plant could not meet the design specifications in the real system. In the case of the FOPD-MESO, the gain at the low-frequency range increased with a rising
, leading to an improvement in the steady-state error. However, simultaneously, the gain in the high-frequency range also increased with a rising
, indicating a decrease in noise suppression performance.
(4) Closed-loop Bode plots: The closed-loop transfer function is identical to the complementary sensitivity function, as per (
38) and (
36). The Bode plots are depicted in
Figure 9b. It is observed that the PD-MESO exhibited the lowest resonance peak. The resonance peak of the PD-LESO was notably higher than that of the other controllers. The resonance peak of the FOPD-MESO increased with a rising
, accompanied by an increase in the gain in the high-frequency range. The relative stability and noise suppression of the FOPD-MESO decreased as
increased.
(5) The disturbance rejection of the closed loop: According to (
19), the disturbance transfer function of the speed loop is
Bode plots of the disturbance transfer function
are presented in
Figure 10. It is evident that the MESO-based ADRC exhibited superior disturbance rejection performance compared to the other controllers. Moreover, the disturbance rejection performance of the FOPD-MESO improved with an increasing
. Therefore, in addition to the MESO, the FOPD-MESO can enhance the disturbance rejection performance by adjusting
. The choice of
involves a trade-off between disturbance rejection and noise suppression.
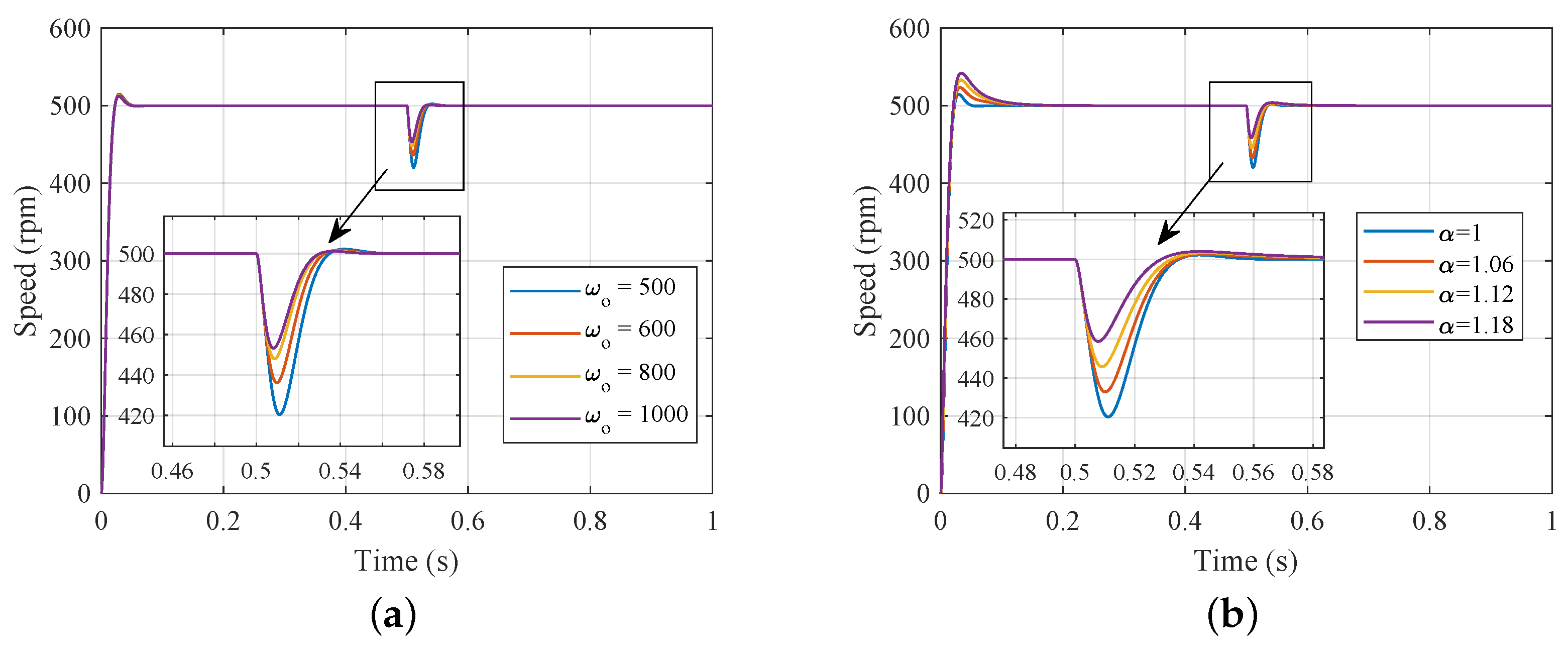
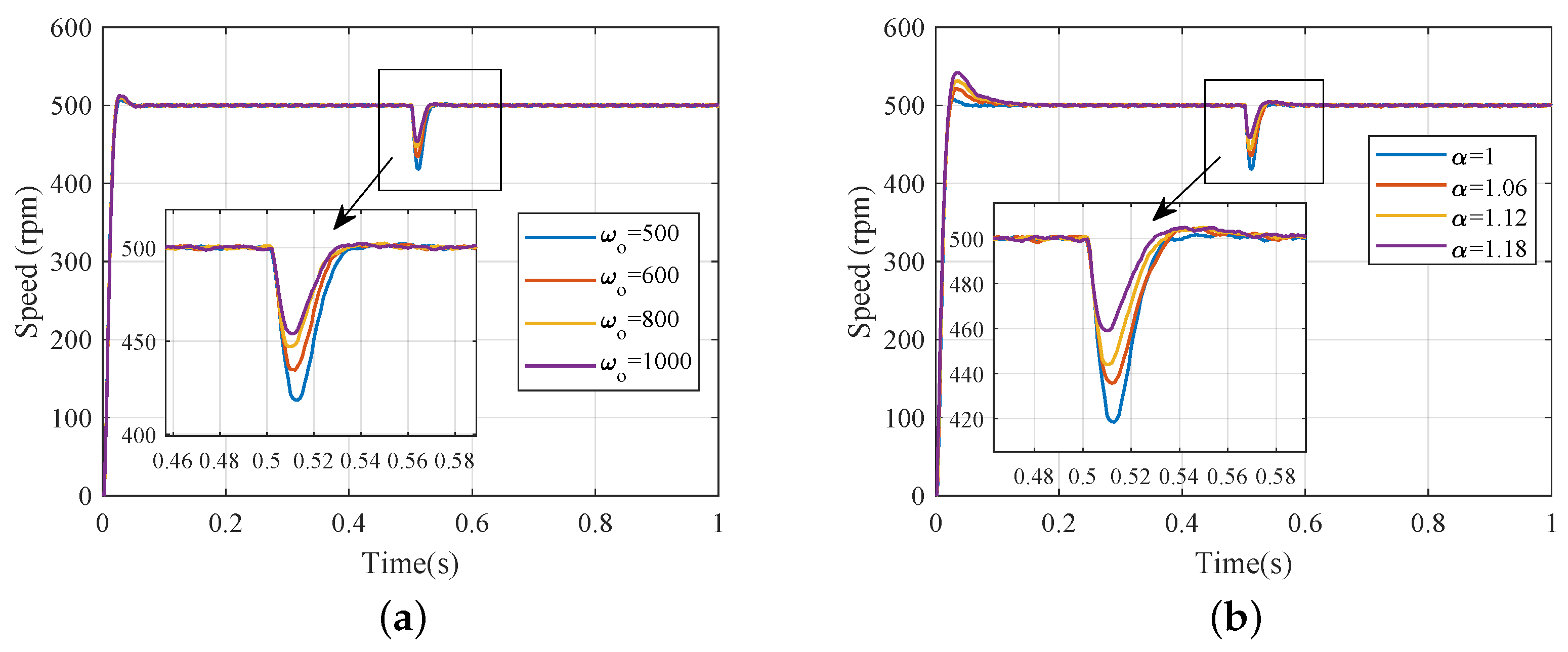
(6) The disturbance rejection tuning with
and
: Based on the analysis above, it can be concluded that the disturbance rejection performance of the FOPD-MESO can be simultaneously tuned by adjusting
and
. To explore this property, the step responses with disturbance for various
and
values are depicted in
Figure 11a,b.
Figure 11a demonstrates that the disturbance rejection performance improved as the value of
increased, while the tracking performance remained unchanged. This verifies that the MESO-based ADRC satisfied the separation principle. The tracking performance was independent of the observer gain.
Figure 11b illustrates that the disturbance rejection performance improved as
increased. However, the overshoot of the setpoint tracking also increased simultaneously. Therefore, the FOPD provides another tunable parameter
to enhance the disturbance rejection performance based on the MESO.
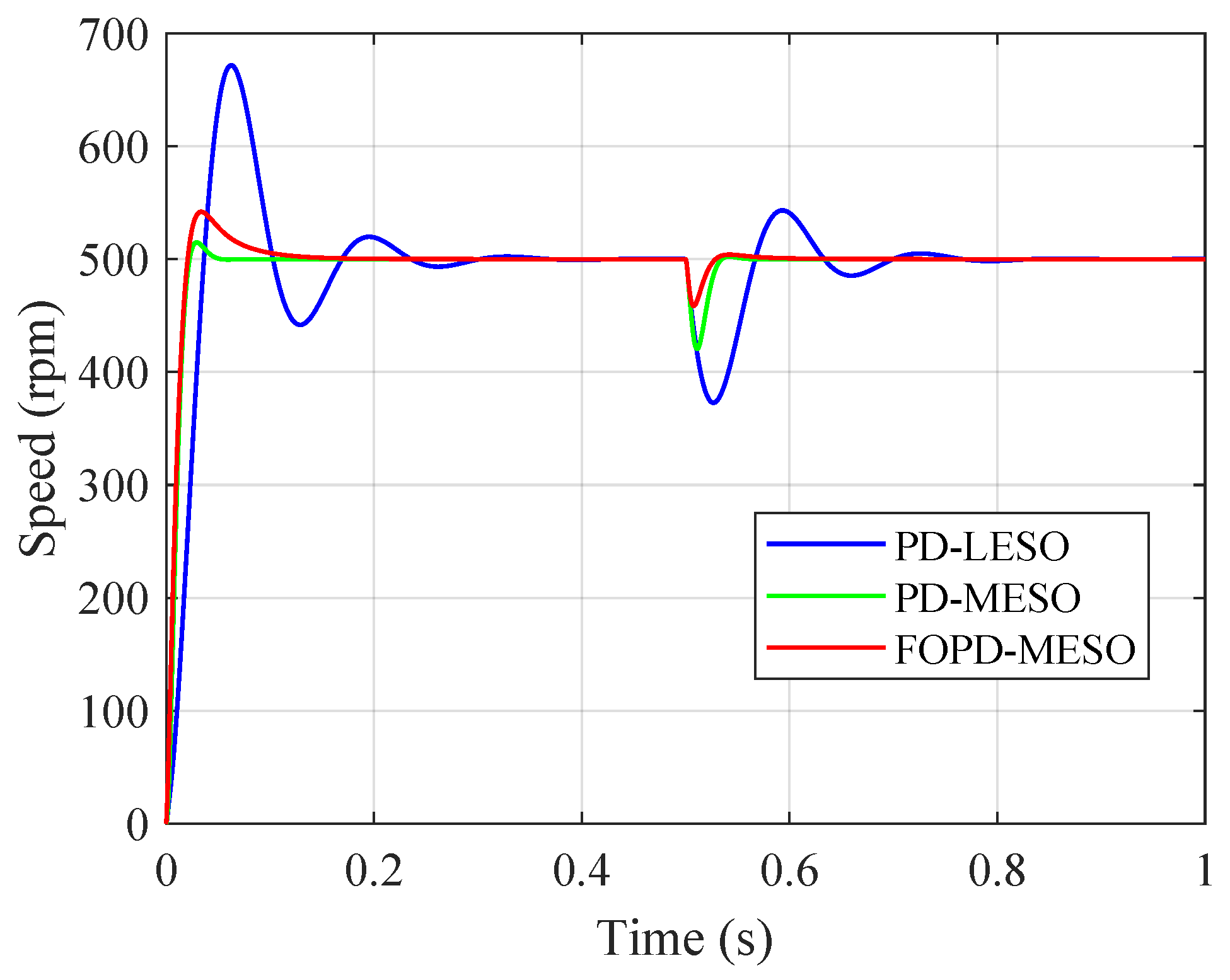
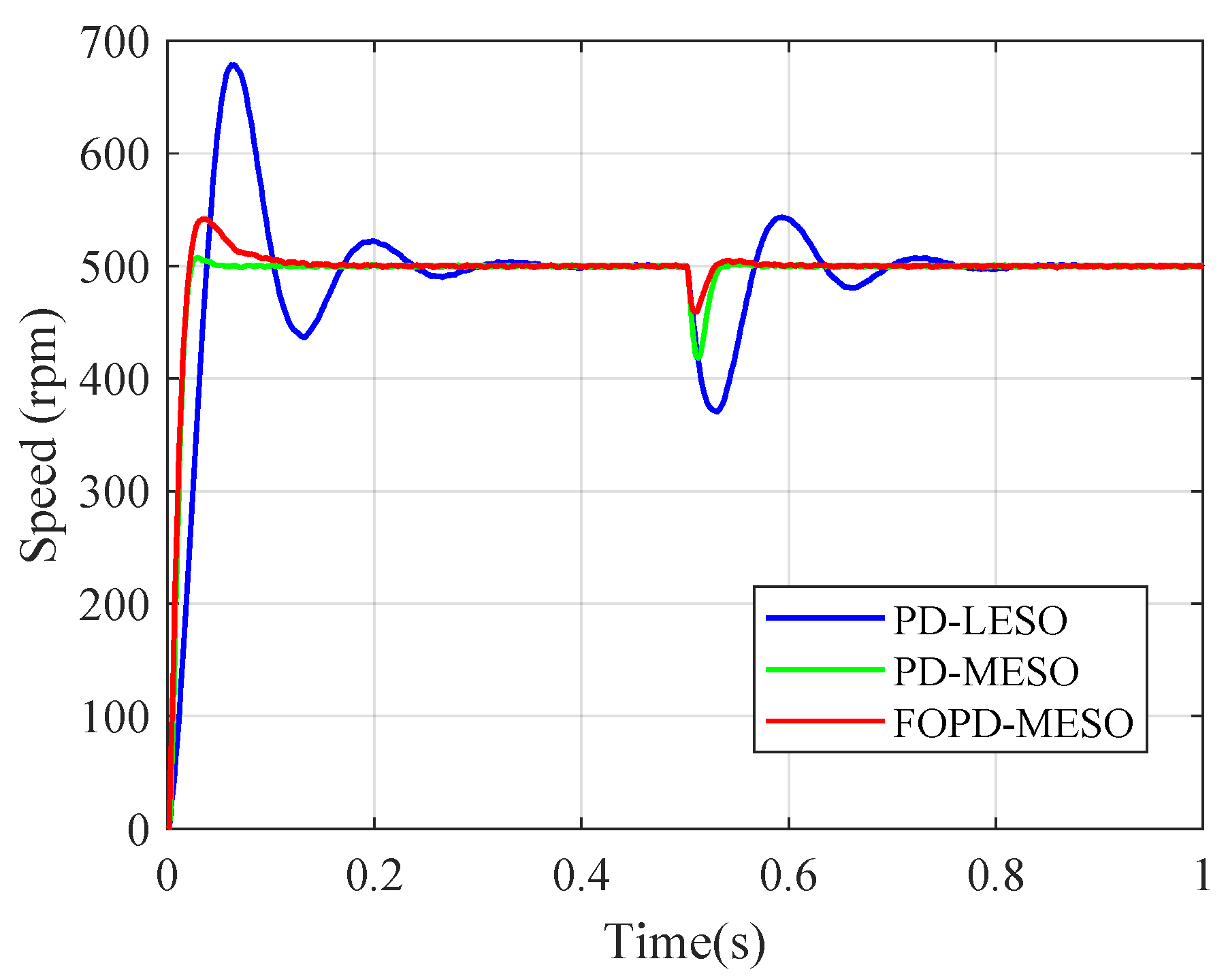
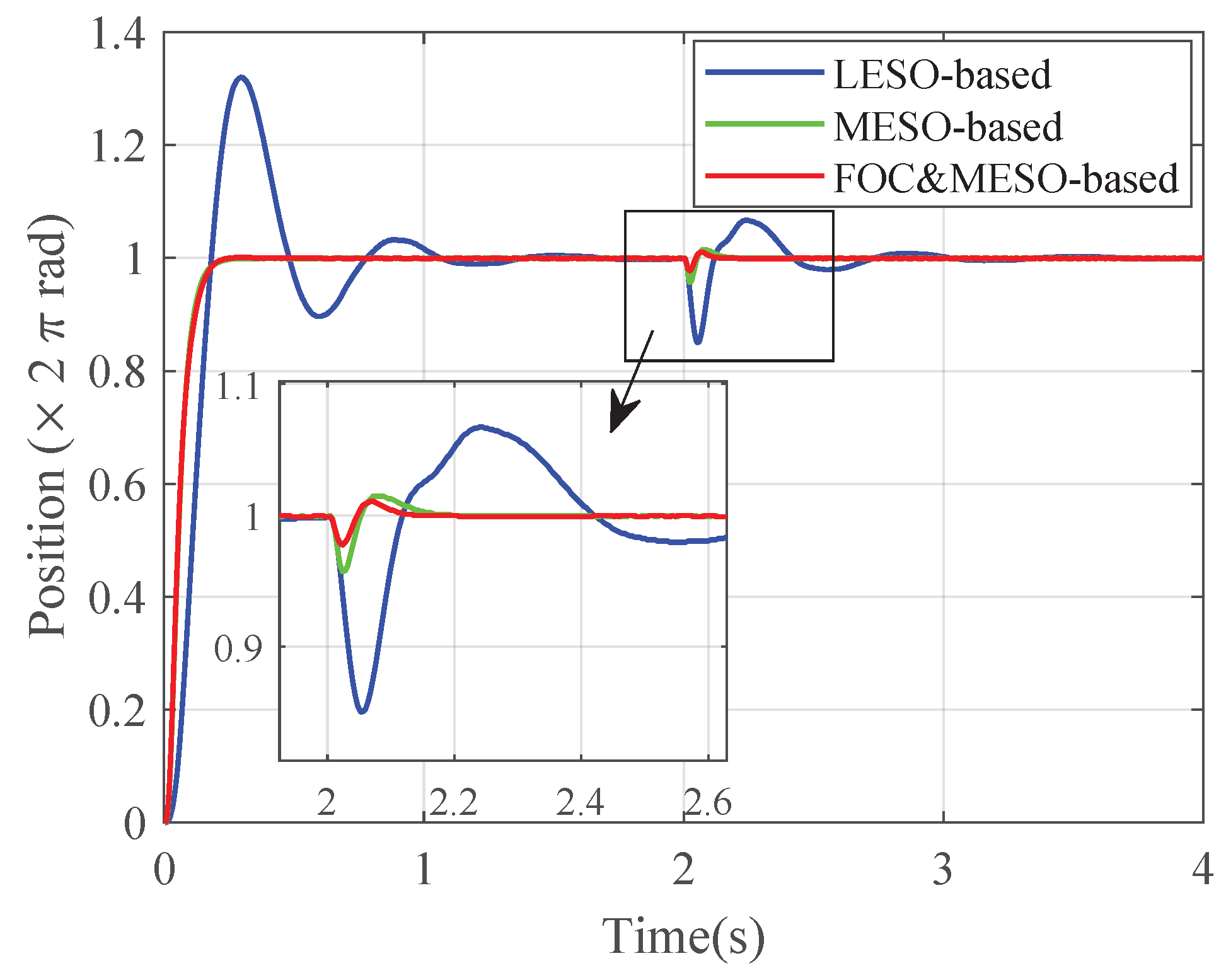
(7) Step response comparison for different control strategies: The step response of the speed loop is depicted in
Figure 12. It is evident that the MESO-based ADRC exhibited superior tracking and disturbance rejection. The PD-LESO exhibited a worse transient response compared to the other controllers. When a disturbance was applied, the speed drop of the FOPD-MESO was 8.3%, significantly less than the PD-MESO’s 15.9%. Compared to the PD-MESO, the overshoot of the FOPD-MESO increased slightly from 3.0% to 8.4%. Therefore, the fractional order
can be adjusted to balance tracking and disturbance rejection performance.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}