



Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control




Abstract
:1. Introduction
- The majority of these works focus on synchronizing two identical delayed FONNSs, which is rarely encountered in real-world scenarios.
- Control plans heavily rely on utilizing both linear and nonlinear elements within the systems.
- The application of SMC methods often leads to undesirable phenomena such as vibration.
- Most studies overlook the inclusion of error models, external disturbances, and input saturations when describing the system.
- Development of a dynamic-free adaptive SMC technique that effectively synchronizes a wide range of complex and chaotic Hopfield delayed FONNSs without the issue of chattering.
- The proposed dynamic-free adaptive SMC approach demonstrates robustness in suppressing system uncertainties, external disturbances, and input-saturation effects.
- Analytical results regarding the general and asymptotic stability of the synchronized closed-loop delayed FONNSs have been obtained by employing the FDM, adaptive controller concepts, and the FO version of the LST. These tools contribute to the reliability of the achieved results.
- Simulations have been conducted to validate the theoretical findings and ensure their applicability in real-world scenarios.
2. Preliminaries and Problem Description
2.1. Preliminary Subjects
2.2. Problem Statement
3. Adaptive SMC Methodology Design
- item 1: if , then ; thus, in (34), one gets
- item 2: if , then ; hence, in (30), one obtains
4. Numerical Simulations
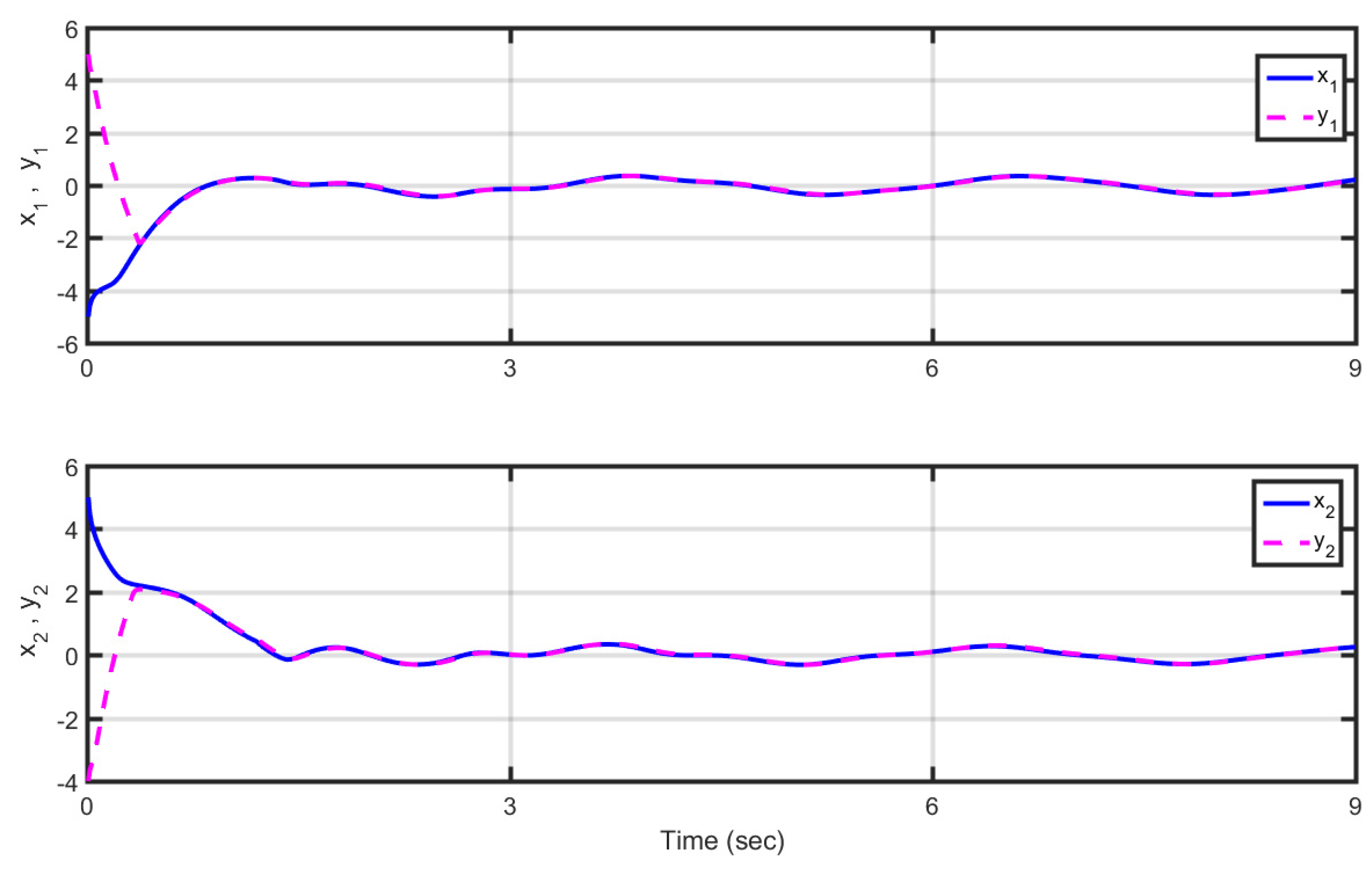
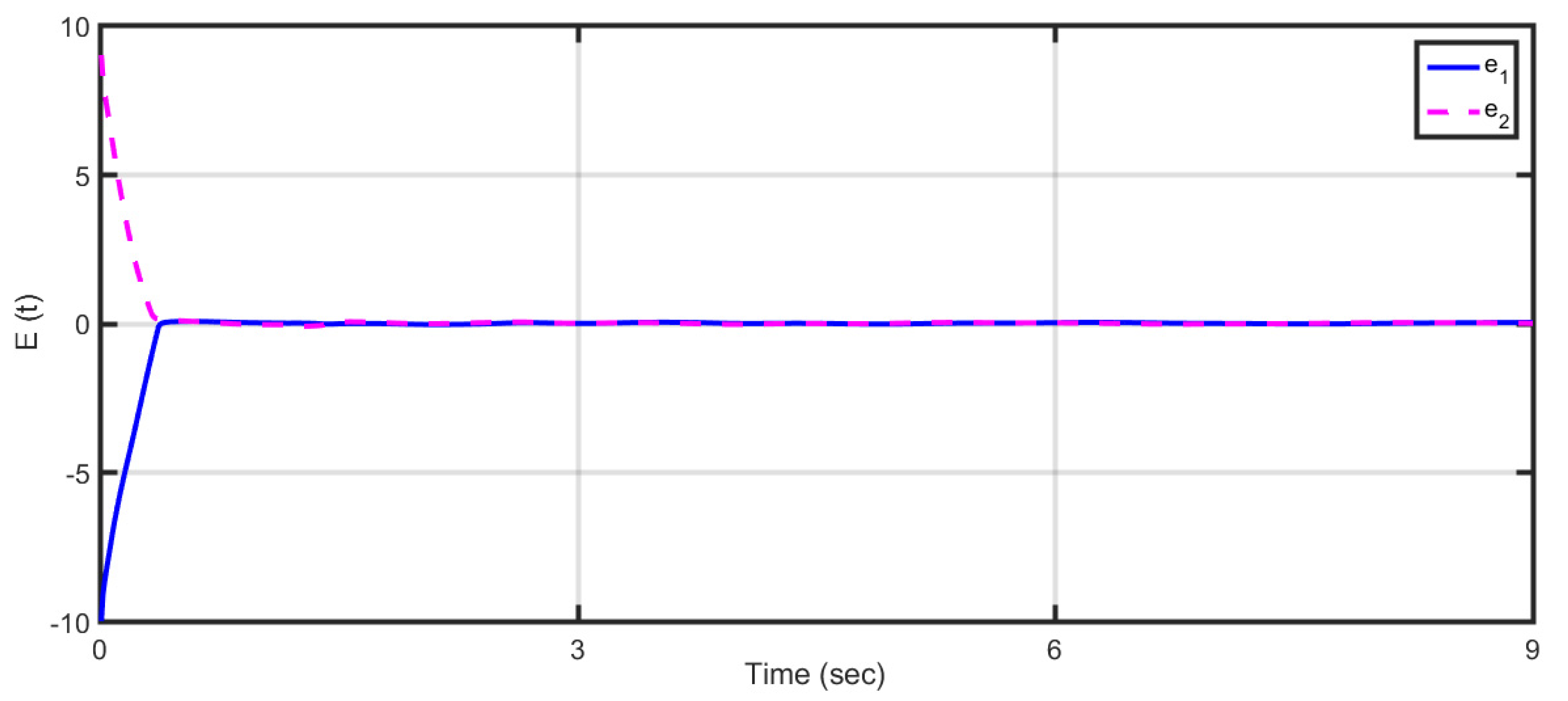
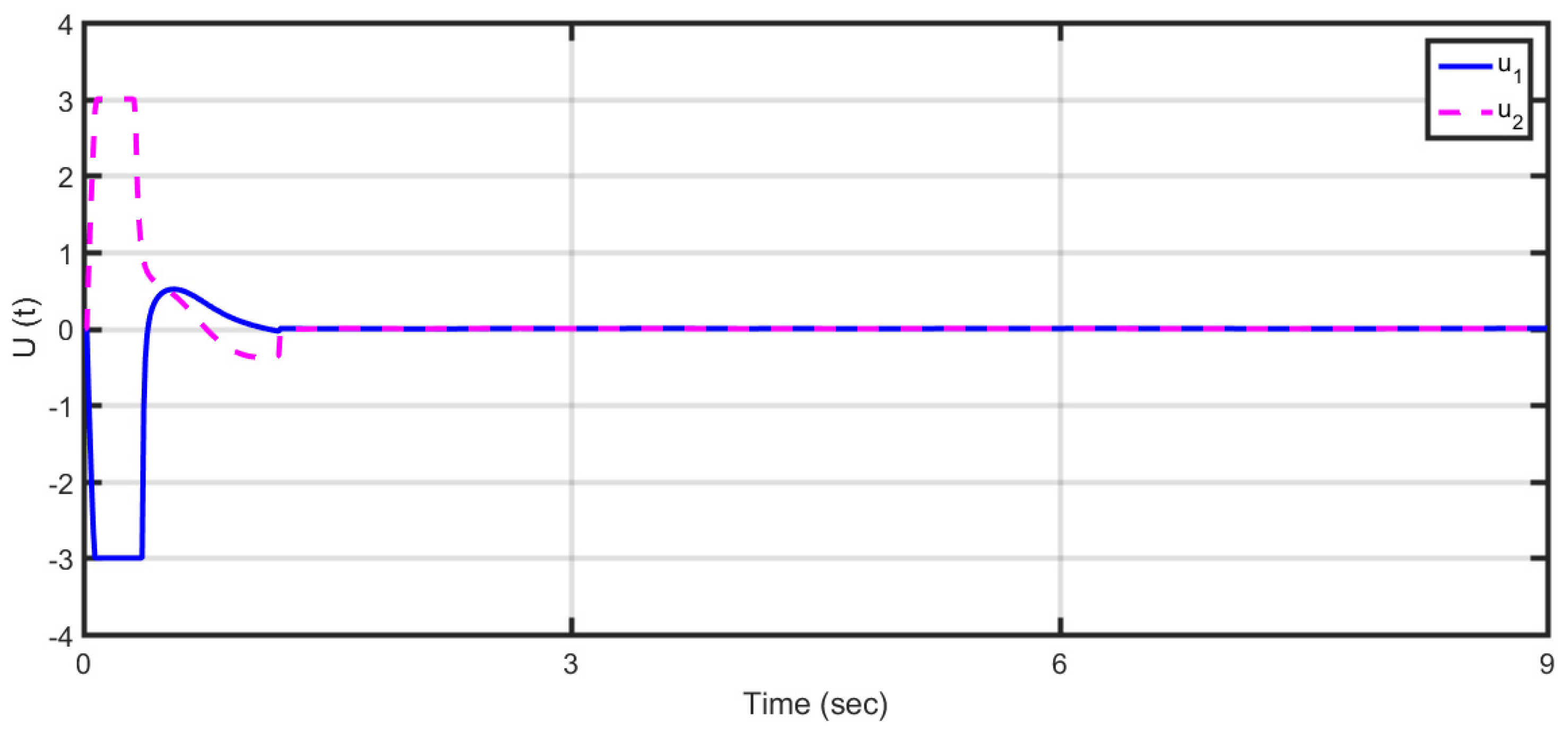
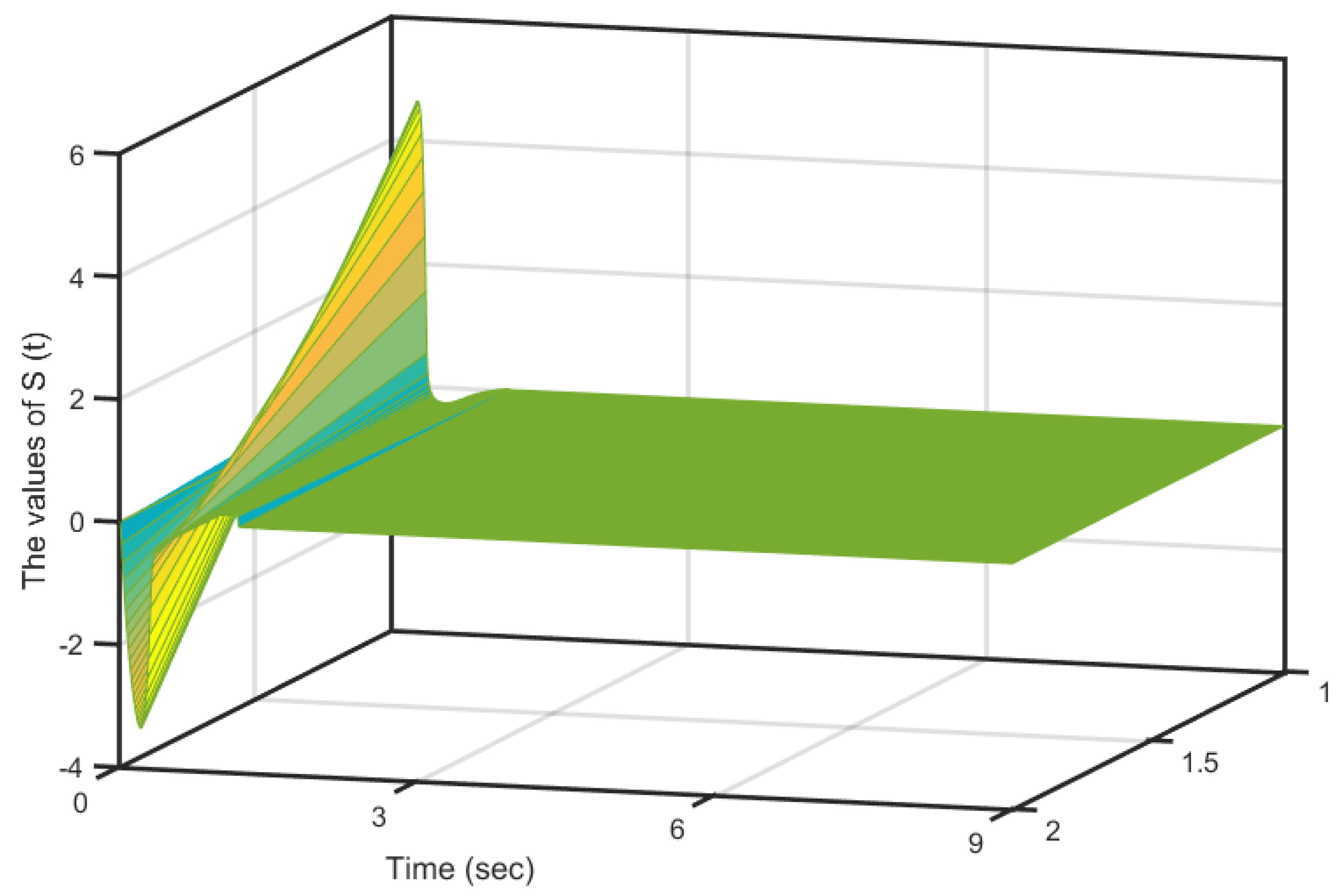
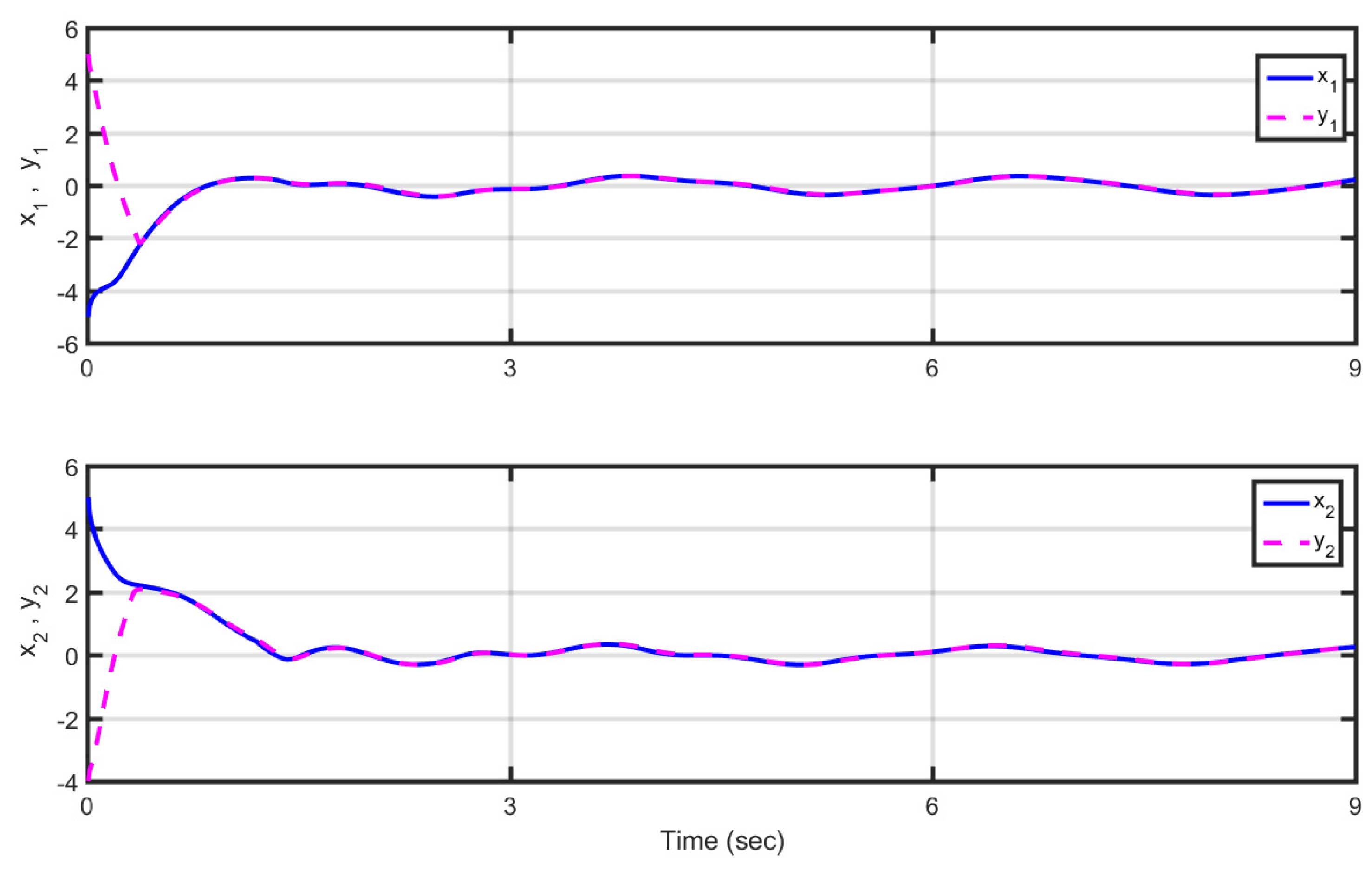
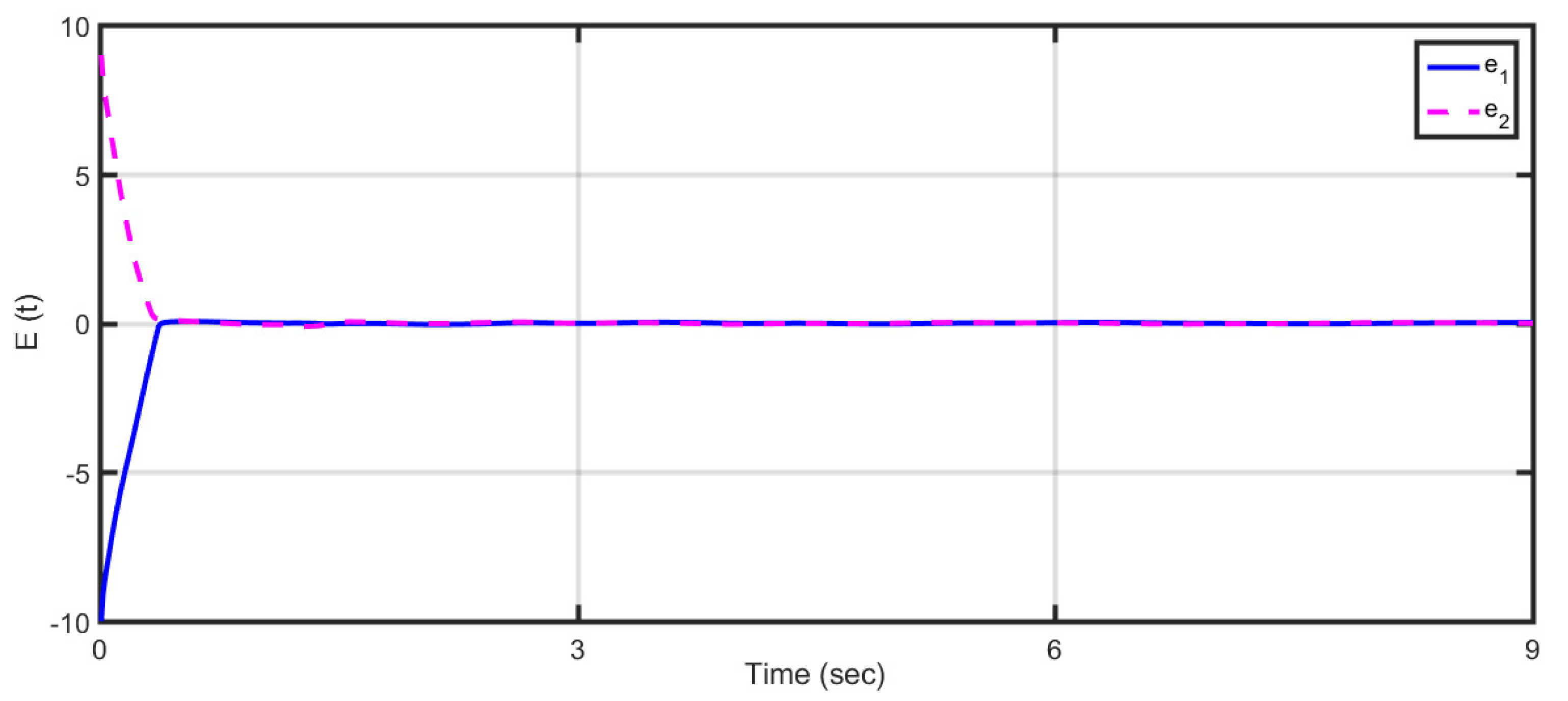
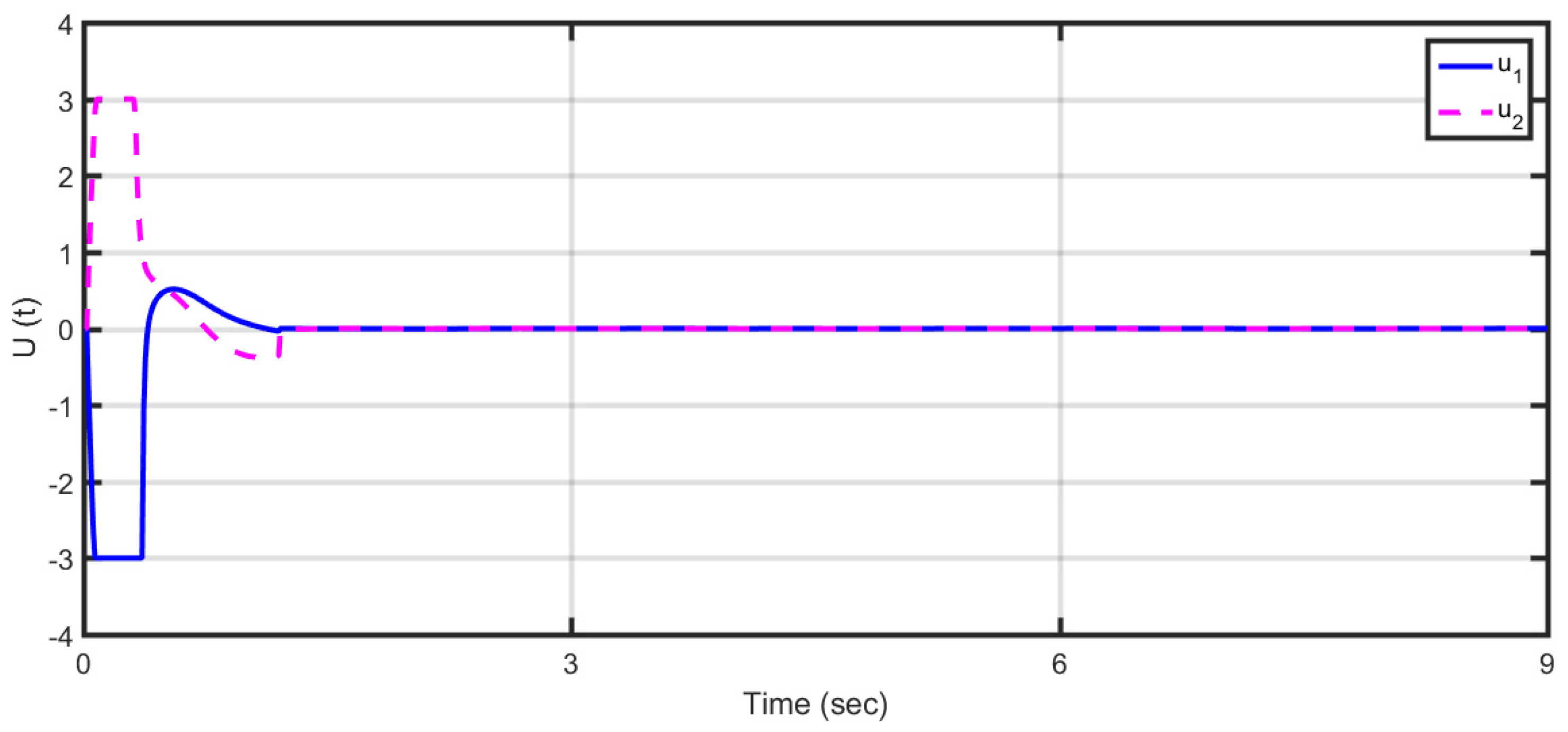
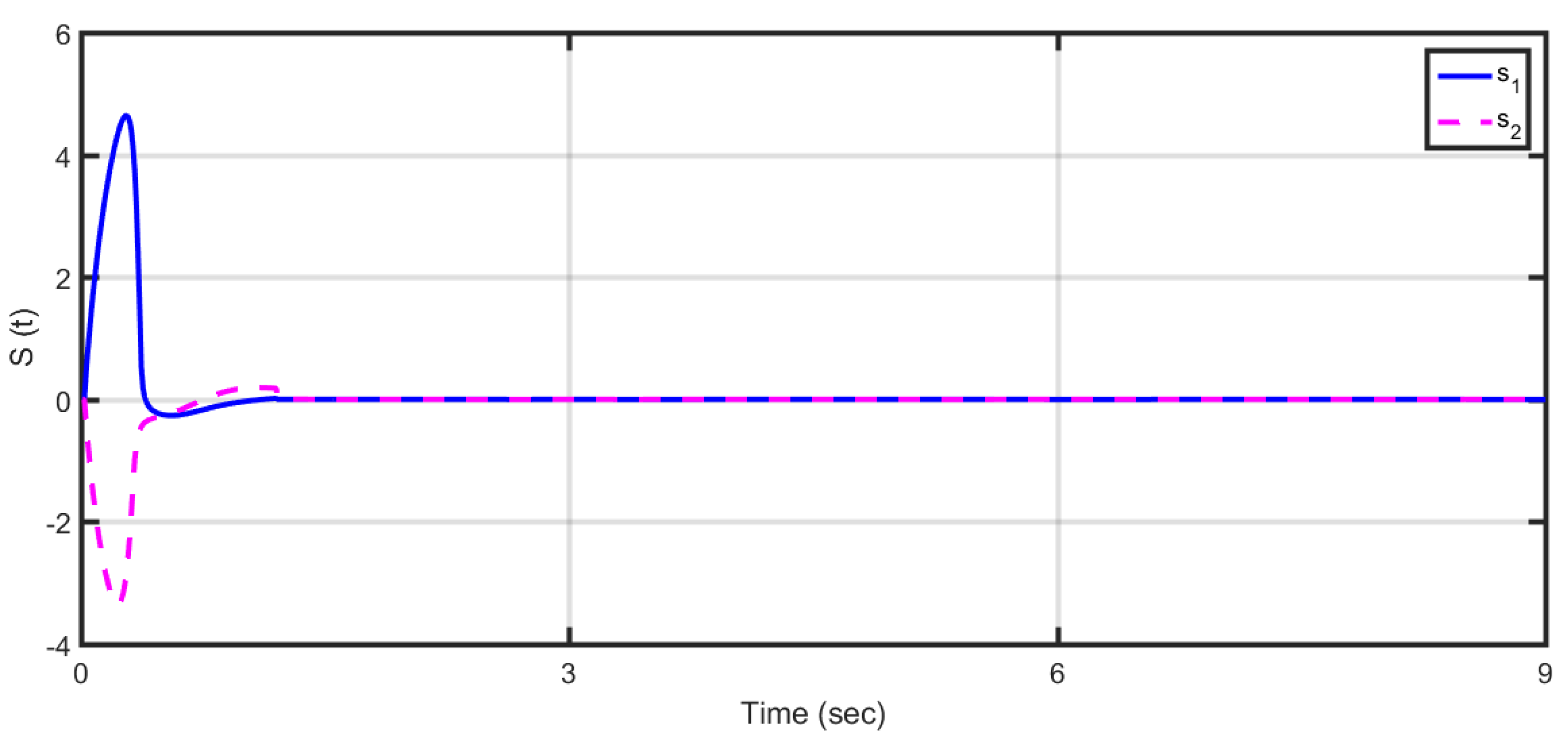
4.1. Synchronization of 2D Unknown Hopfield Delayed FONNSs
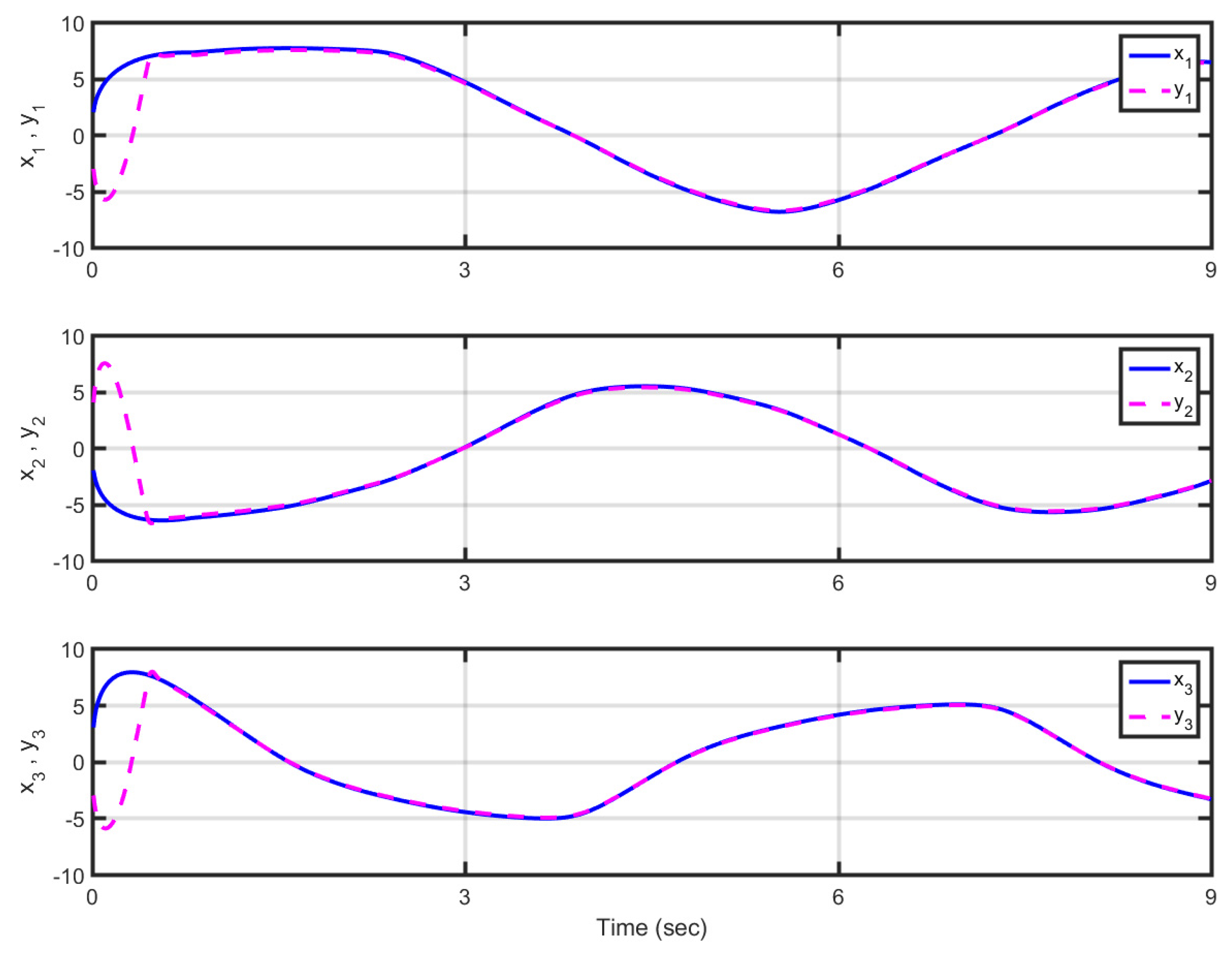
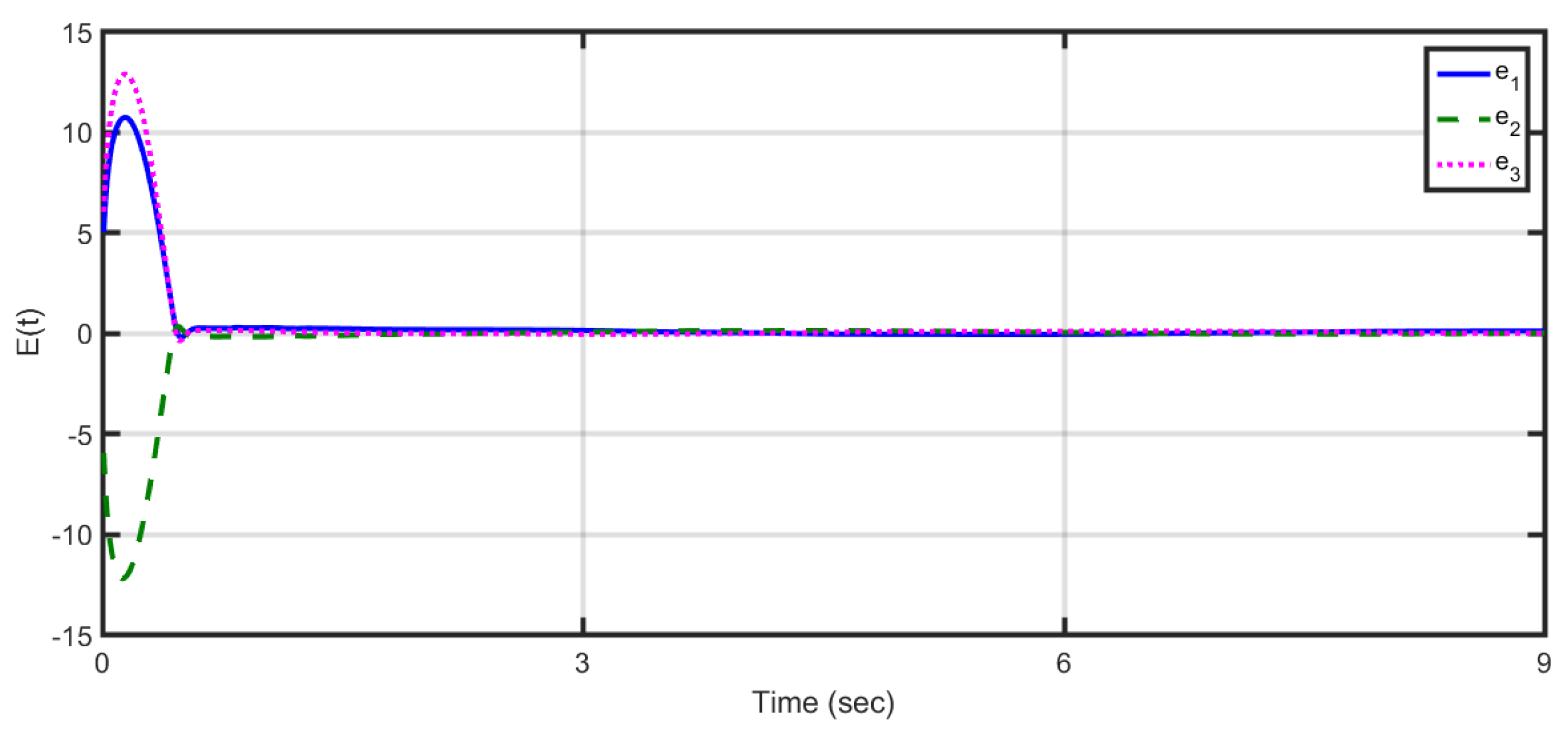
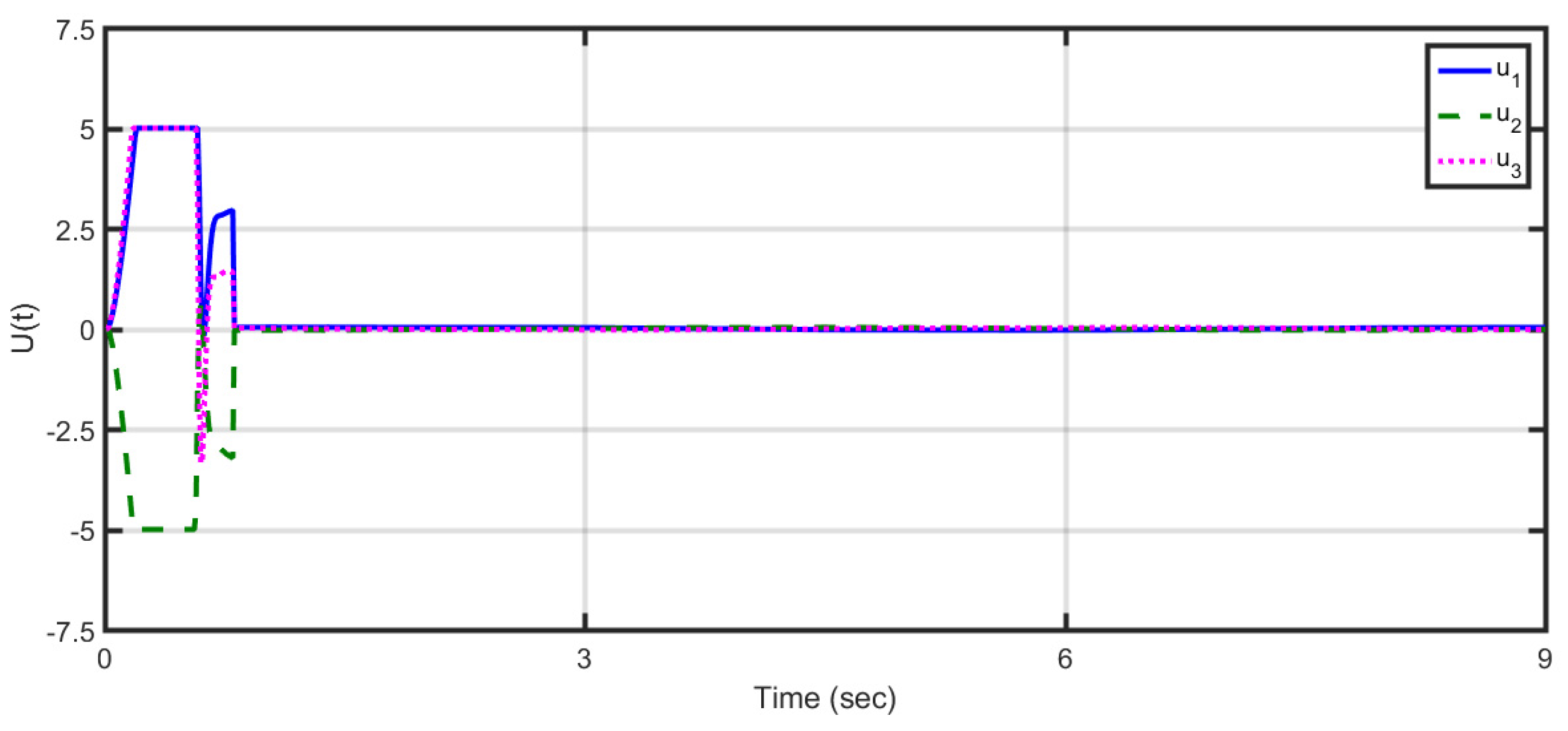
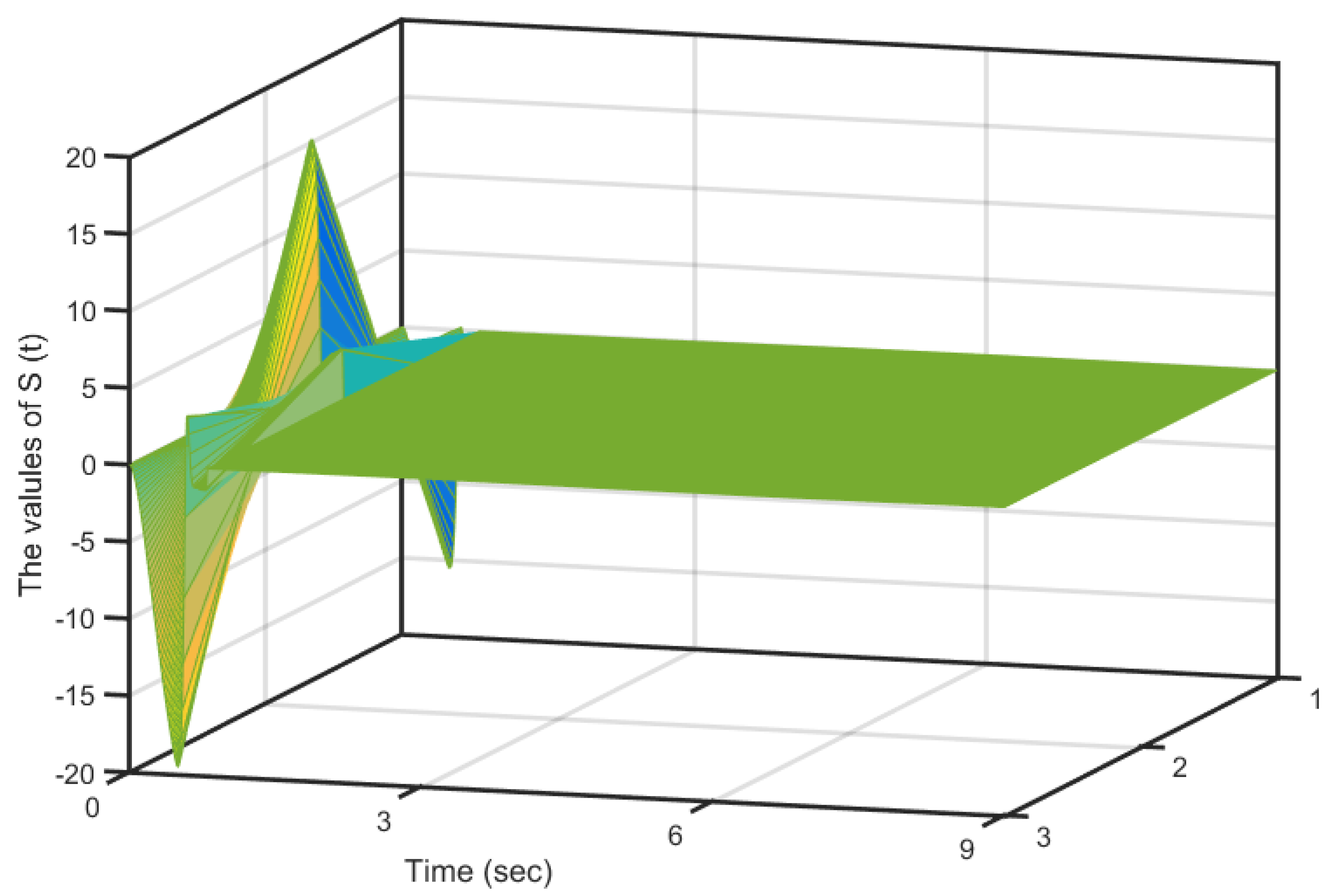
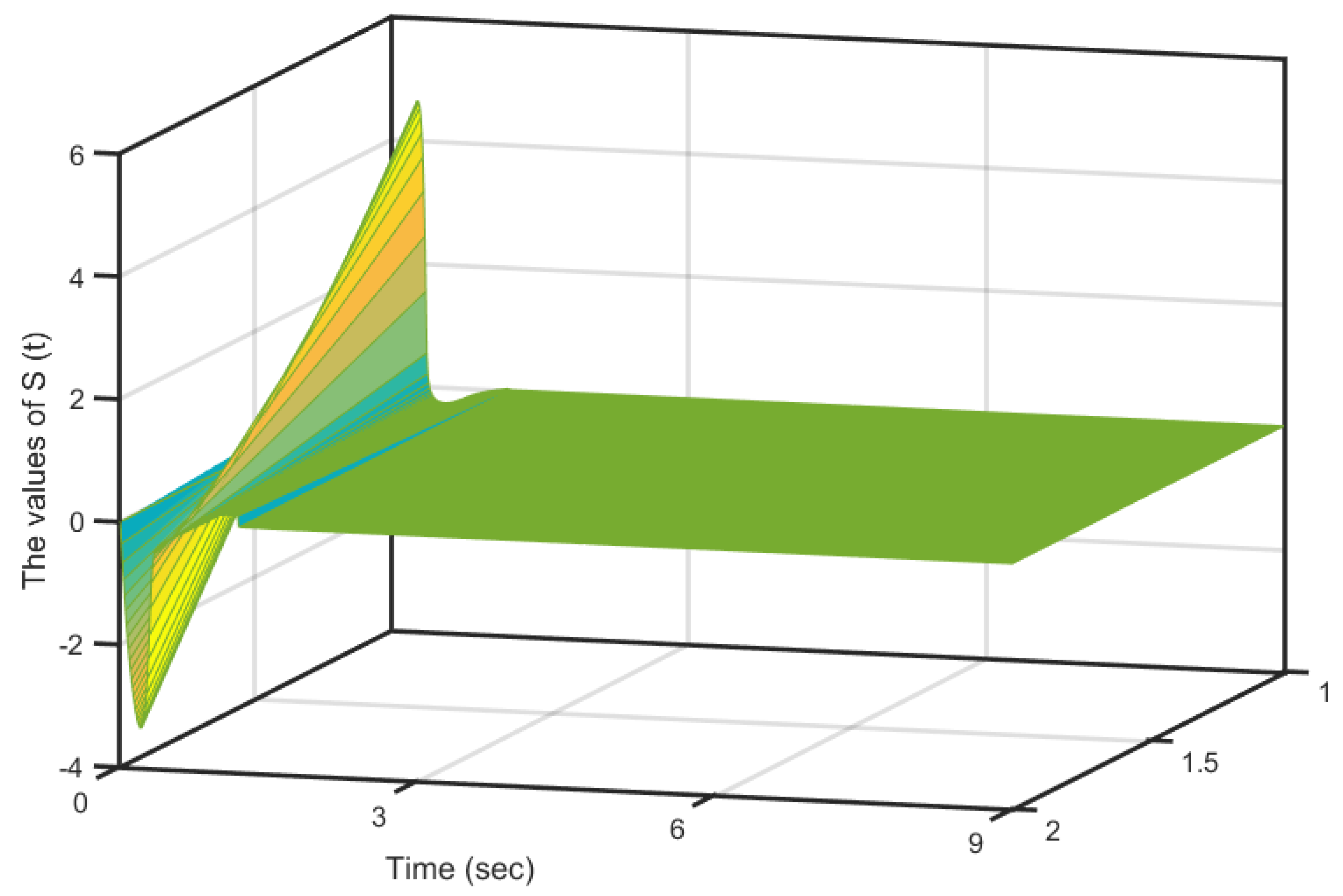
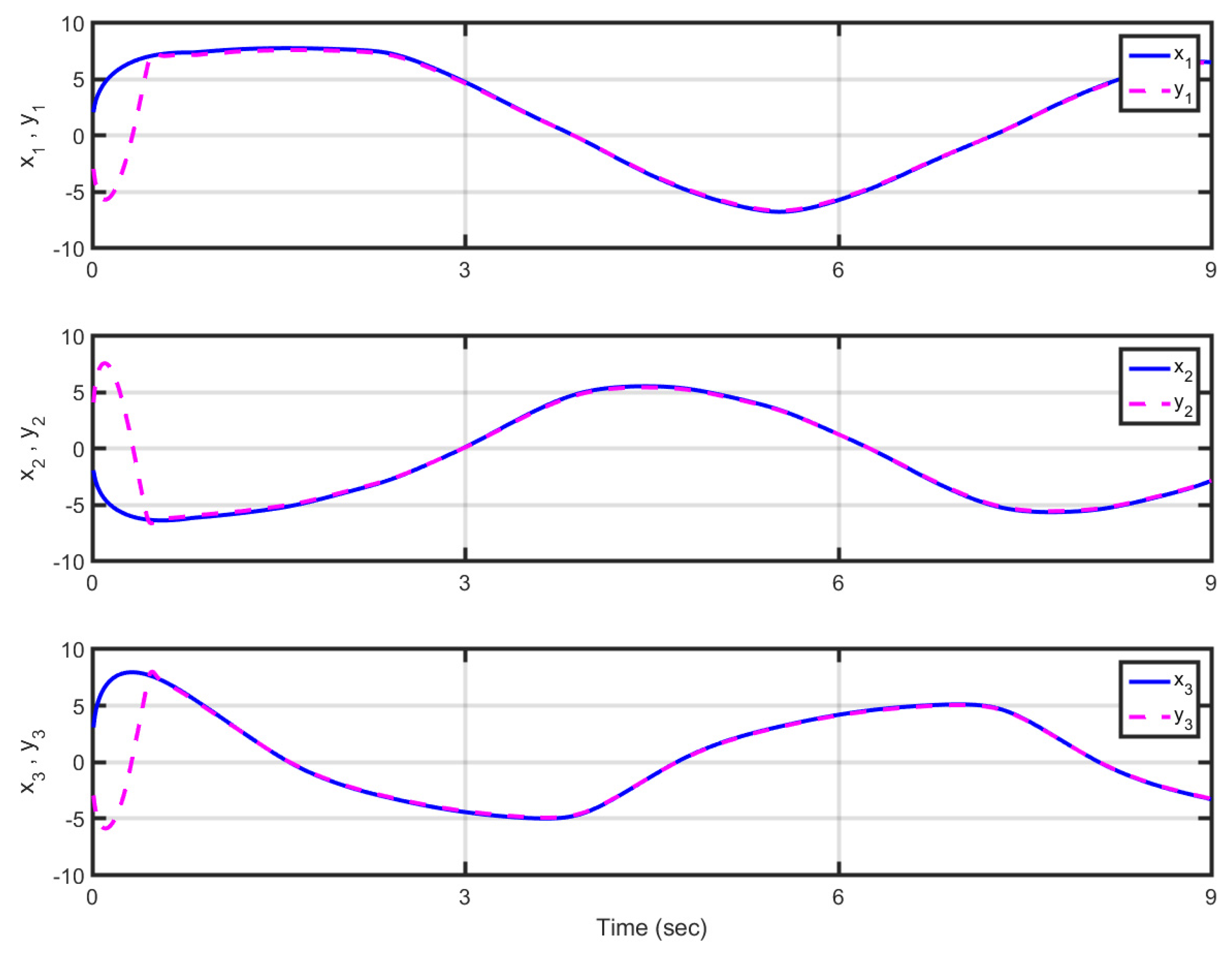
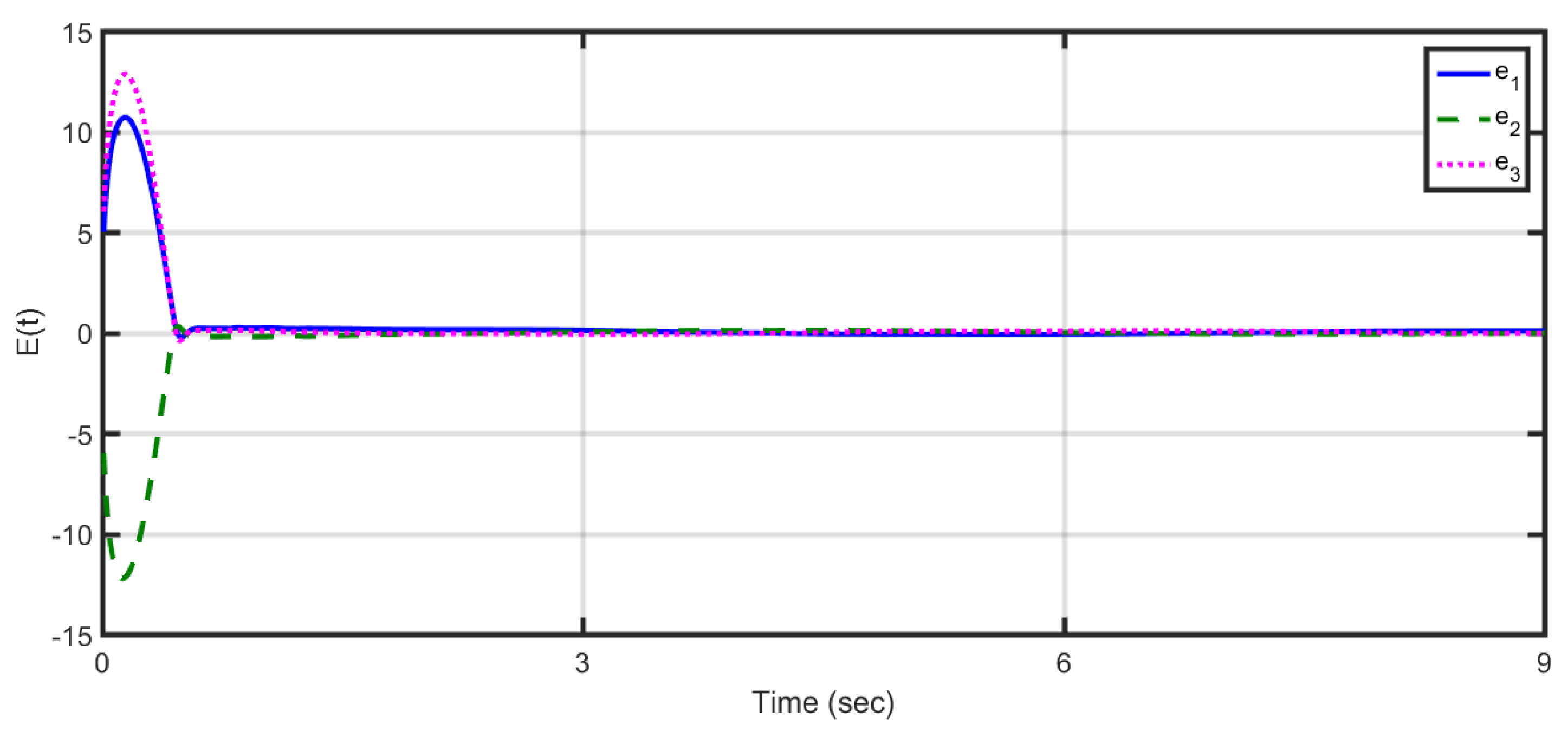
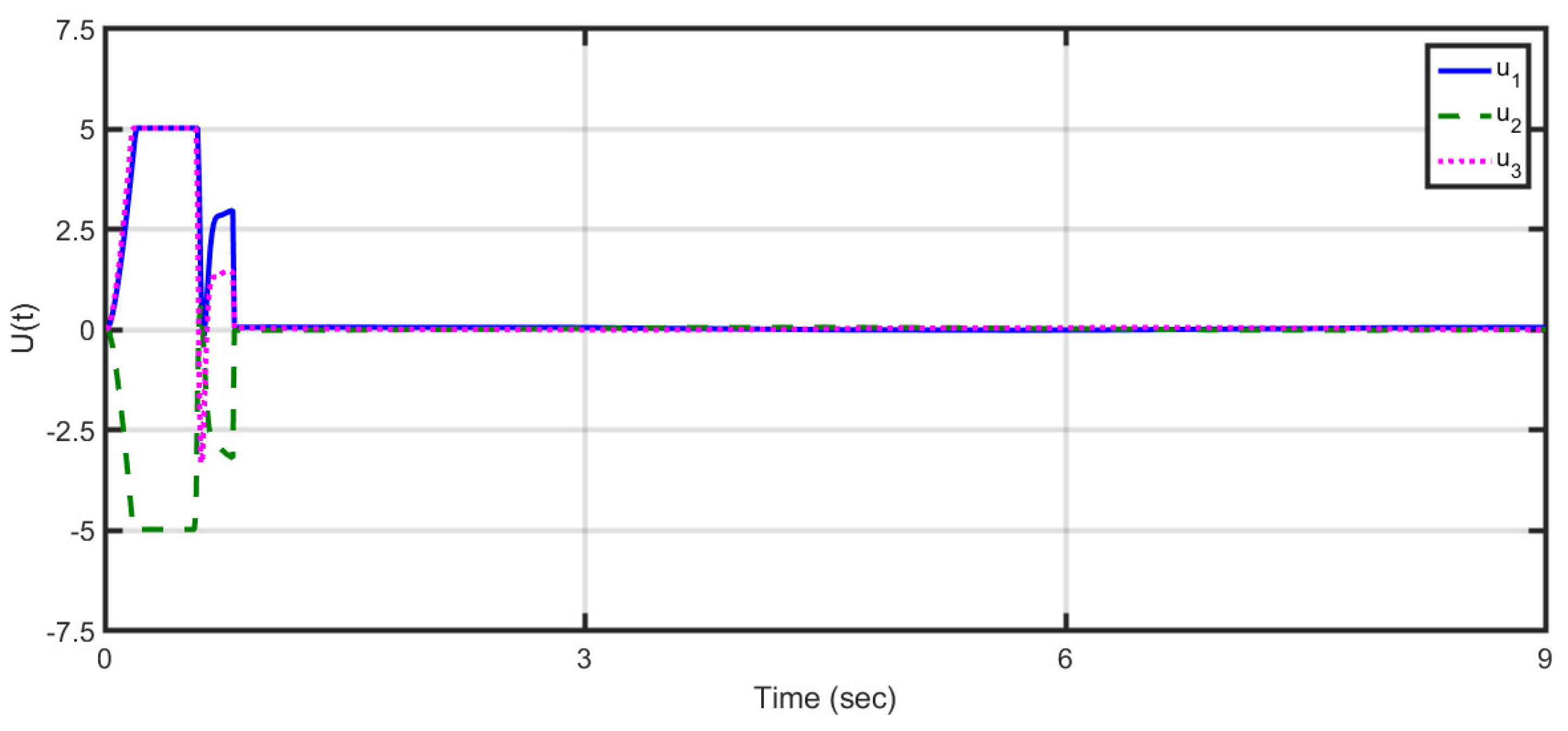
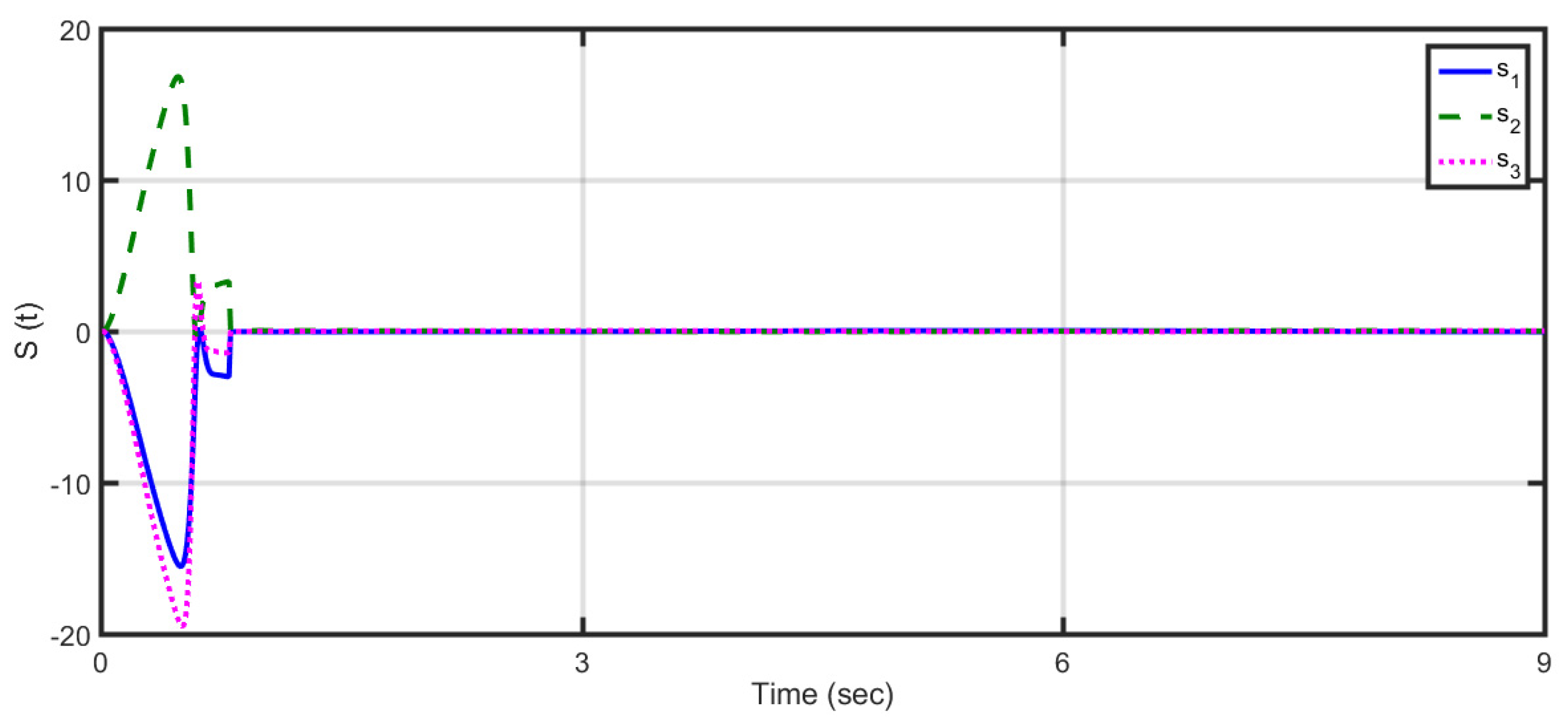
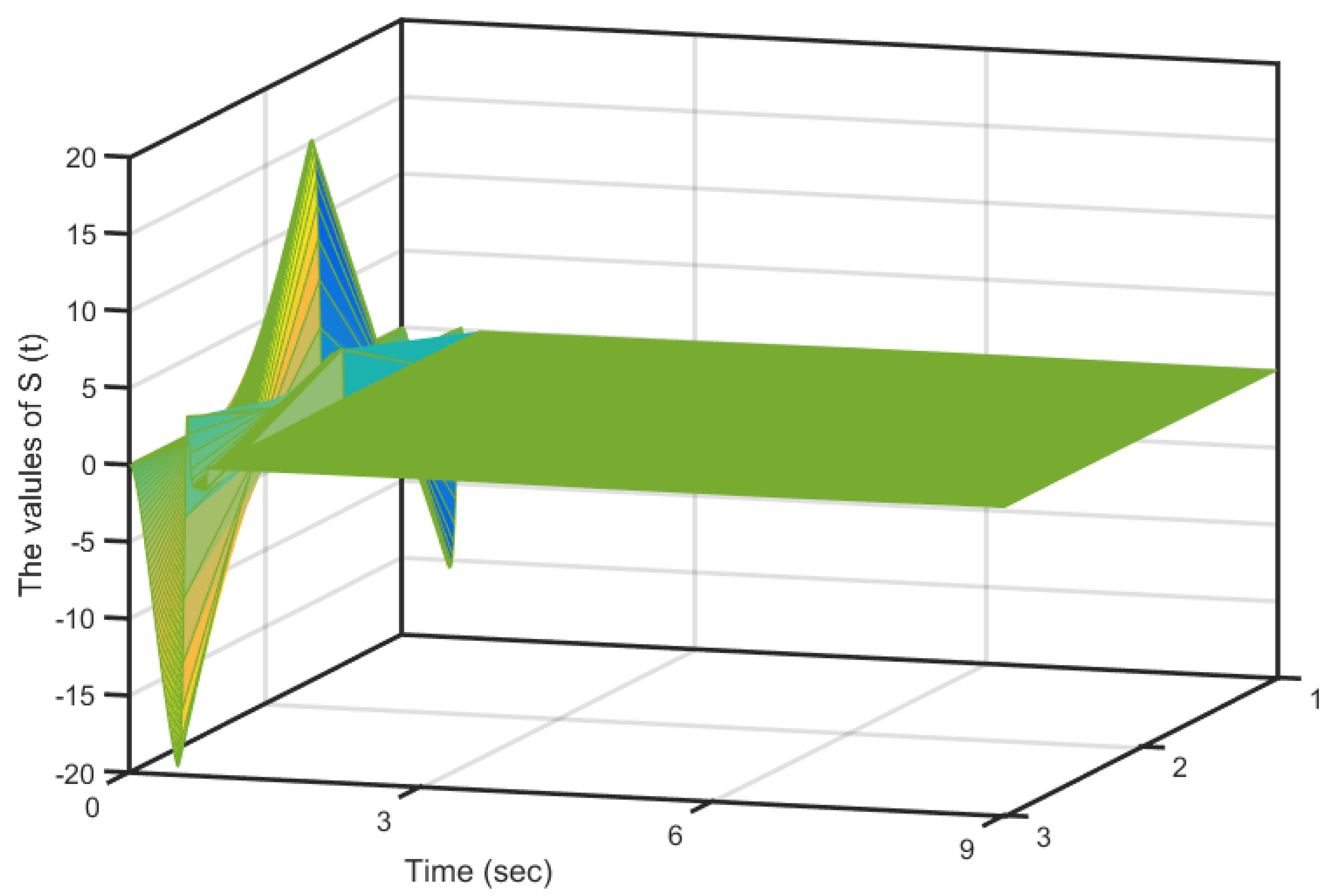
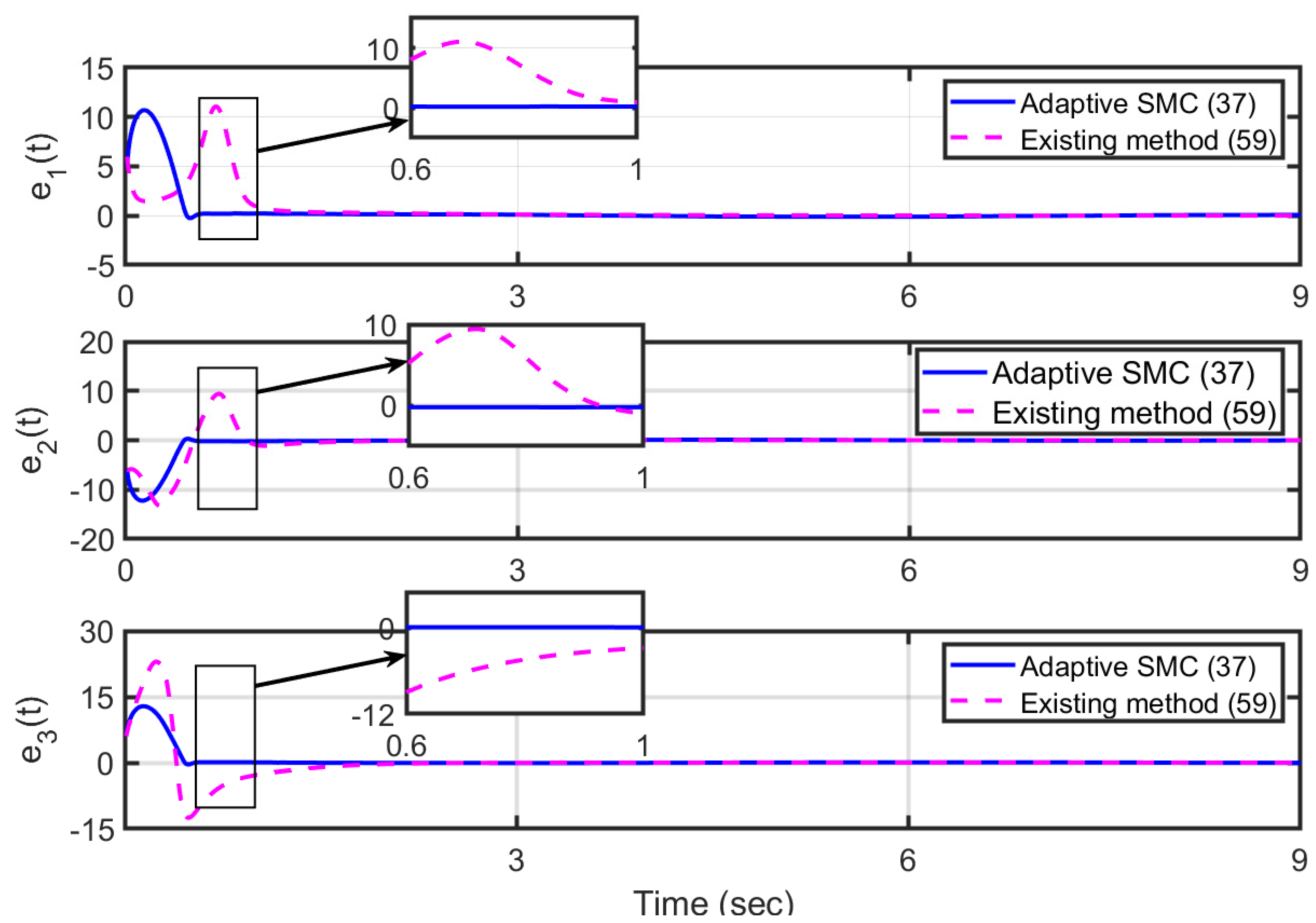
4.2. Synchronization of 3D Unknown Hopfield Delayed FONNSs
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alikhanov, A.A.; Asl, M.S.; Huang, C.; Khibiev, A. A second-order difference scheme for the nonlinear time-fractional diffusion-wave equation with generalized memory kernel in the presence of time delay. J. Comput. Appl. Math. 2023, 438, 115515. [Google Scholar] [CrossRef]
- Asl, M.S.; Javidi, M. Novel algorithms to estimate nonlinear FDEs: Applied to fractional order nutrient-phytoplankton–zooplankton system. J. Comput. Appl. Math. 2018, 339, 193–207. [Google Scholar] [CrossRef]
- Joshi, M.; Bhosale, S.; Vyawahare, V.A. A survey of fractional calculus applications in artificial neural networks. Artif. Intell. Rev. 2023. [Google Scholar] [CrossRef]
- Kathamuthu, N.D.; Subramaniam, S.; Le, Q.H.; Muthusamy, S.; Panchal, H.; Sundararajan, S.C.M.; Alrubaie, A.J.; Zahra, M.M.A. A deep transfer learning-based convolution neural network model for COVID-19 detection using computed tomography scan images for medical applications. Adv. Eng. Softw. 2023, 175, 103317. [Google Scholar] [CrossRef]
- Sharma, M.; Pant, S.; Yadav, P.; Sharma, D.K.; Gupta, N.; Srivastava, G. Advancing Security in the Industrial Internet of Things Using Deep Progressive Neural Networks. Mob. Netw. Appl. 2023. [Google Scholar] [CrossRef]
- Moon, S.; Hou, L.; Han, S. Empirical study of an artificial neural network for a manufacturing production operation. Oper. Manag. Res. 2023, 16, 311–323. [Google Scholar] [CrossRef]
- Xiang, L.; Gai, J.; Bao, Y.; Yu, J.; Schnable, P.S.; Tang, L. Field-based robotic leaf angle detection and characterization of maize plants using stereo vision and deep convolutional neural networks. J. Field Robot. 2023, 40, 1034–1053. [Google Scholar] [CrossRef]
- Roohi, M.; Zhang, C.; Chen, Y. Adaptive model-free synchronization of different fractional-order neural networks with an application in cryptography. Nonlinear Dyn. 2020, 100, 3979–4001. [Google Scholar] [CrossRef]
- Solak, M.; Faydasicok, O.; Arik, S. A general framework for robust stability analysis of neural networks with discrete time delays. Neural Netw. 2023, 162, 186–198. [Google Scholar] [CrossRef]
- Nagamani, G.; Adhira, B.; Soundararajan, G. Non-fragile extended dissipative state estimation for delayed discrete-time neural networks: Application to quadruple tank process model. Nonlinear Dyn. 2021, 104, 451–466. [Google Scholar] [CrossRef]
- Kiruthika, R.; Krishnasamy, R.; Lakshmanan, S.; Prakash, M.; Manivannan, A. Non-fragile sampled-data control for synchronization of chaotic fractional-order delayed neural networks via LMI approach. Chaos Solitons Fractals 2023, 169, 113252. [Google Scholar] [CrossRef]
- Zhou, W.; Zhou, X.; Yang, J.; Zhou, J.; Tong, D. Stability Analysis and Application for Delayed Neural Networks Driven by Fractional Brownian Noise. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1491–1502. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhu, S.; Shao, H.; Feng, Y.; Wang, L.; Wen, S. Comprehensive analysis of fixed-time stability and energy cost for delay neural networks. Neural Netw. 2022, 155, 413–421. [Google Scholar] [CrossRef] [PubMed]
- Ramajayam, S.; Rajavel, S.; Samidurai, R.; Cao, Y. Finite-Time Synchronization for T–S Fuzzy Complex-Valued Inertial Delayed Neural Networks Via Decomposition Approach. Neural Process. Lett. 2023. [Google Scholar] [CrossRef]
- Nancy Jane, Y.; Khanna Nehemiah, H.; Arputharaj, K. A Q-backpropagated time delay neural network for diagnosing severity of gait disturbances in Parkinson’s disease. J. Biomed. Inform. 2016, 60, 169–176. [Google Scholar] [CrossRef]
- Rasooli Berardehi, Z.; Zhang, C.; Taheri, M.; Roohi, M.; Khooban, M.H. Implementation of T-S fuzzy approach for the synchronization and stabilization of non-integer-order complex systems with input saturation at a guaranteed cost. Trans. Inst. Meas. Control 2023, 45, 2536–2553. [Google Scholar] [CrossRef]
- Rasooli Berardehi, Z.; Zhang, C.; Taheri, M.; Roohi, M.; Khooban, M.H. A Fuzzy Control Strategy to Synchronize Fractional-Order Nonlinear Systems Including Input Saturation. Int. J. Intell. Syst. 2023, 2023, 1550256. [Google Scholar] [CrossRef]
- Shalaby, R.; El-Hossainy, M.; Abo-Zalam, B.; Mahmoud, T.A. Optimal fractional-order PID controller based on fractional-order actor-critic algorithm. Neural Comput. Appl. 2023, 35, 2347–2380. [Google Scholar] [CrossRef]
- Farid, Y.; Ruggiero, F. Finite-time extended state observer and fractional-order sliding mode controller for impulsive hybrid port-Hamiltonian systems with input delay and actuators saturation: Application to ball-juggler robots. Mech. Mach. Theory 2022, 167, 104577. [Google Scholar] [CrossRef]
- Xing, Y.; Wang, Y. Finite-Time Adaptive NN Backstepping Dynamic Surface Control for Input-Delay Fractional-Order Nonlinear Systems. IEEE Access 2023, 11, 5206–5214. [Google Scholar] [CrossRef]
- Taheri, M.; Chen, Y.; Zhang, C.; Berardehi, Z.R.; Roohi, M.; Khooban, M.H. A finite-time sliding mode control technique for synchronization chaotic fractional-order laser systems with application on encryption of color images. Optik 2023, 285, 170948. [Google Scholar] [CrossRef]
- Taheri, M.; Zhang, C.; Berardehi, Z.R.; Chen, Y.; Roohi, M. No-chatter model-free sliding mode control for synchronization of chaotic fractional-order systems with application in image encryption. Multimed. Tools Appl. 2022, 81, 24167–24197. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Alqahtani, M.H.; Aljumah, A.S.; Aly, M.; Almutairi, S.Z.; Mohamed, E.A. Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources. Fractal Fract. 2023, 7, 603. [Google Scholar] [CrossRef]
- Drakunov, S.V.; Utkin, V.I. Sliding mode control in dynamic systems. Int. J. Control 1992, 55, 1029–1037. [Google Scholar] [CrossRef]
- Jia, T.; Chen, X.; He, L.; Zhao, F.; Qiu, J. Finite-Time Synchronization of Uncertain Fractional-Order Delayed Memristive Neural Networks via Adaptive Sliding Mode Control and Its Application. Fractal Fract. 2022, 6, 502. [Google Scholar] [CrossRef]
- Karimaghaee, P.; Rashidnejad Heydari, Z. Lag-synchronization of two different fractional-order time-delayed chaotic systems using fractional adaptive sliding mode controller. Int. J. Dyn. Control 2021, 9, 211–224. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, Y.; Mu, Y.; Ming, Z. Neural Network-Based Adaptive Sliding-Mode Control for Fractional Order Fuzzy System With Unmatched Disturbances and Time-Varying Delays. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 5174–5184. [Google Scholar] [CrossRef]
- Shi, X.; Jin, Y.; Zhou, X.; Wang, C. Sliding mode control for fractional-order time-varying delay systems under external excitation. J. Vib. Control 2022, 29, 1713–1725. [Google Scholar] [CrossRef]
- Chen, J.; Li, C.; Yang, X. Global Mittag–Leffler projective synchronization of nonidentical fractional-order neural networks with delay via sliding mode control. Neurocomputing 2018, 313, 324–332. [Google Scholar] [CrossRef]
- Song, X.; Song, S.; Li, B.; Tejado Balsera, I. Adaptive projective synchronization for time-delayed fractional-order neural networks with uncertain parameters and its application in secure communications. Trans. Inst. Meas. Control 2017, 40, 3078–3087. [Google Scholar] [CrossRef]
- Bahraini, M.S.; Mahmoodabadi, M.J.; Lohse, N. Robust Adaptive Fuzzy Fractional Control for Nonlinear Chaotic Systems with Uncertainties. Fractal Fract. 2023, 7, 484. [Google Scholar] [CrossRef]
- Thuan, M.V.; Huong, D.C. Robust guaranteed cost control for time-delay fractional-order neural networks systems. Optim. Control Appl. Methods 2019, 40, 613–625. [Google Scholar] [CrossRef]
- Dalir, M.; Bigdeli, N. An Adaptive neuro-fuzzy backstepping sliding mode controller for finite time stabilization of fractional-order uncertain chaotic systems with time-varying delays. Int. J. Mach. Learn. Cybern. 2021, 12, 1949–1971. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, H.; Sun, J.; Wang, Y. Sliding Mode Control Based on Reinforcement Learning for T-S Fuzzy Fractional-Order Multiagent System With Time-Varying Delays. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Yang, F.; Shen, Y.; Li, D.; Lin, S.; Muyeen, S.M.; Zhai, H.; Zhao, J. Fractional-Order Sliding Mode Load Frequency Control and Stability Analysis for Interconnected Power Systems With Time-Varying Delay. IEEE Trans. Power Syst. 2023, 1–11. [Google Scholar] [CrossRef]
- Gu, Y.; Sun, J.; Fu, X. A Novel Robust Neural Network Sliding-Mode Control Method for Synchronizing Fractional Order Chaotic Systems in the Presence of Uncertainty, Disturbance and Time-Varying Delay. J. Electr. Eng. Technol. 2023, 18, 1325–1335. [Google Scholar] [CrossRef]
- Parvizian, M.; Khandani, K.; Majd, V.J. A non-fragile observer-based adaptive sliding mode control for fractional-order Markovian jump systems with time delay and input nonlinearity. Trans. Inst. Meas. Control 2020, 42, 1448–1460. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier Science: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Li, C.; Deng, W. Remarks on fractional derivatives. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Wang, B.; Ding, J.; Wu, F.; Zhu, D. Robust finite-time control of fractional-order nonlinear systems via frequency distributed model. Nonlinear Dyn. 2016, 85, 2133–2142. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.; Wang, H. Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal. Hybrid Syst. 2015, 16, 104–121. [Google Scholar] [CrossRef]
- Curran, P.F.; Chua, L.O. Absolute Stability Theory and the Synchronization Problem. Int. J. Bifurc. Chaos 1997, 07, 1375–1382. [Google Scholar] [CrossRef]
- Roohi, M.; Aghababa, M.P.; Haghighi, A.R. Switching adaptive controllers to control fractional-order complex systems with unknown structure and input nonlinearities. Complexity 2015, 21, 211–223. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, D.; Jiang, B.; Pan, T. Prescribed performance based model-free adaptive sliding mode constrained control for a class of nonlinear systems. Inf. Sci. 2021, 544, 97–116. [Google Scholar] [CrossRef]
- Asl, M.S.; Javidi, M. An improved PC scheme for nonlinear fractional differential equations: Error and stability analysis. J. Comput. Appl. Math. 2017, 324, 101–117. [Google Scholar] [CrossRef]
- Meng, B.; Wang, X. Adaptive Synchronization for Uncertain Delayed Fractional-Order Hopfield Neural Networks via Fractional-Order Sliding Mode Control. Math. Probl. Eng. 2018, 2018, 1603629. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspects of Comparison | The Outcomes of This Research | The Outcomes of Ref. [48] |
|---|---|---|
| Control Approach | Dynamic-free adaptive SMC | Adaptive SMC |
| Controller Configuration Parameters | In total, the selection of 2n + 5 parameters is necessary. | In total, the selection of 8n parameters is necessary |
| System Details. | The dynamic-free adaptive SMC method does not require dynamic terms of the systems; only the states are sufficient. | The Adaptive SMC requires complete access to dynamic terms from both the drive and response systems. |
| Amplitude of Oscillations | Standard Range (determined by the behavior of the error system) | Beyond Range (determined by the behavior of the error system) |
| Conclusions | The benefits of the suggested dynamic-free adaptive SMC are as follows: (1) Enhanced robustness; (2) Simplified controller design for practical feasibility; (3) Absence of chattering; (4) Heightened convergence precision. | The advantages of the adaptive SMC method include: (1) A potential challenge with numerous parameters that can be complex to manage; (2) Effective operation when the system states are known; (3) Absence of chattering; |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roohi, M.; Zhang, C.; Taheri, M.; Basse-O’Connor, A. Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control. Fractal Fract. 2023, 7, 682. https://doi.org/10.3390/fractalfract7090682
Roohi M, Zhang C, Taheri M, Basse-O’Connor A. Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control. Fractal and Fractional. 2023; 7(9):682. https://doi.org/10.3390/fractalfract7090682
Chicago/Turabian StyleRoohi, Majid, Chongqi Zhang, Mostafa Taheri, and Andreas Basse-O’Connor. 2023. "Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control" Fractal and Fractional 7, no. 9: 682. https://doi.org/10.3390/fractalfract7090682
APA StyleRoohi, M., Zhang, C., Taheri, M., & Basse-O’Connor, A. (2023). Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control. Fractal and Fractional, 7(9), 682. https://doi.org/10.3390/fractalfract7090682