


Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System

 , ,
, ,  and
and 
Abstract
:1. Introduction
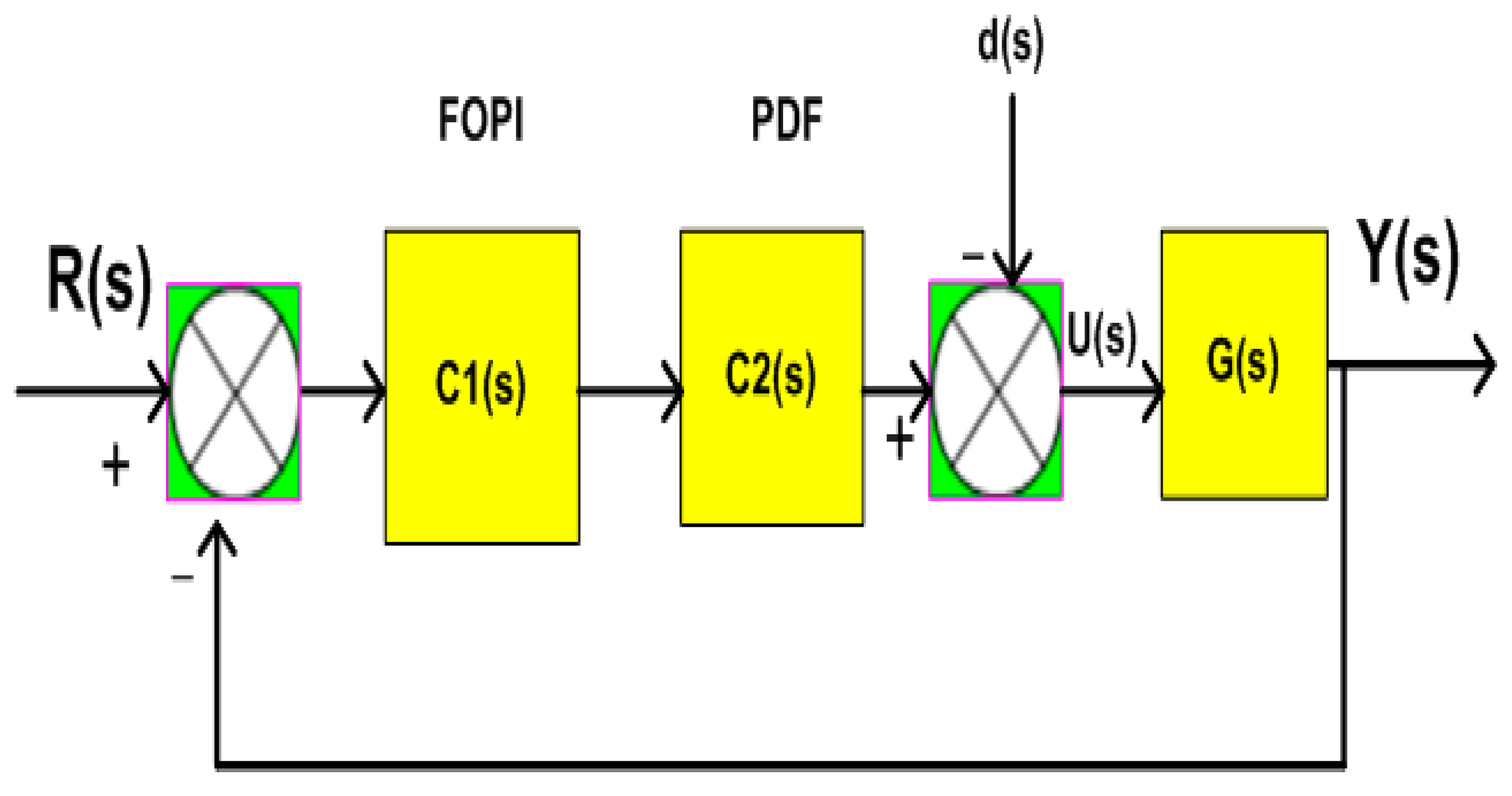
- For the connected PS taking into account electrical vehicles, a novel cascade structure of the proportional integral (PI)-proportional derivative with filter (PDF) is adopted.
- The proposed cascaded control structure is compared to a number of other control approaches, such as PIDF, PID, and PI controllers.
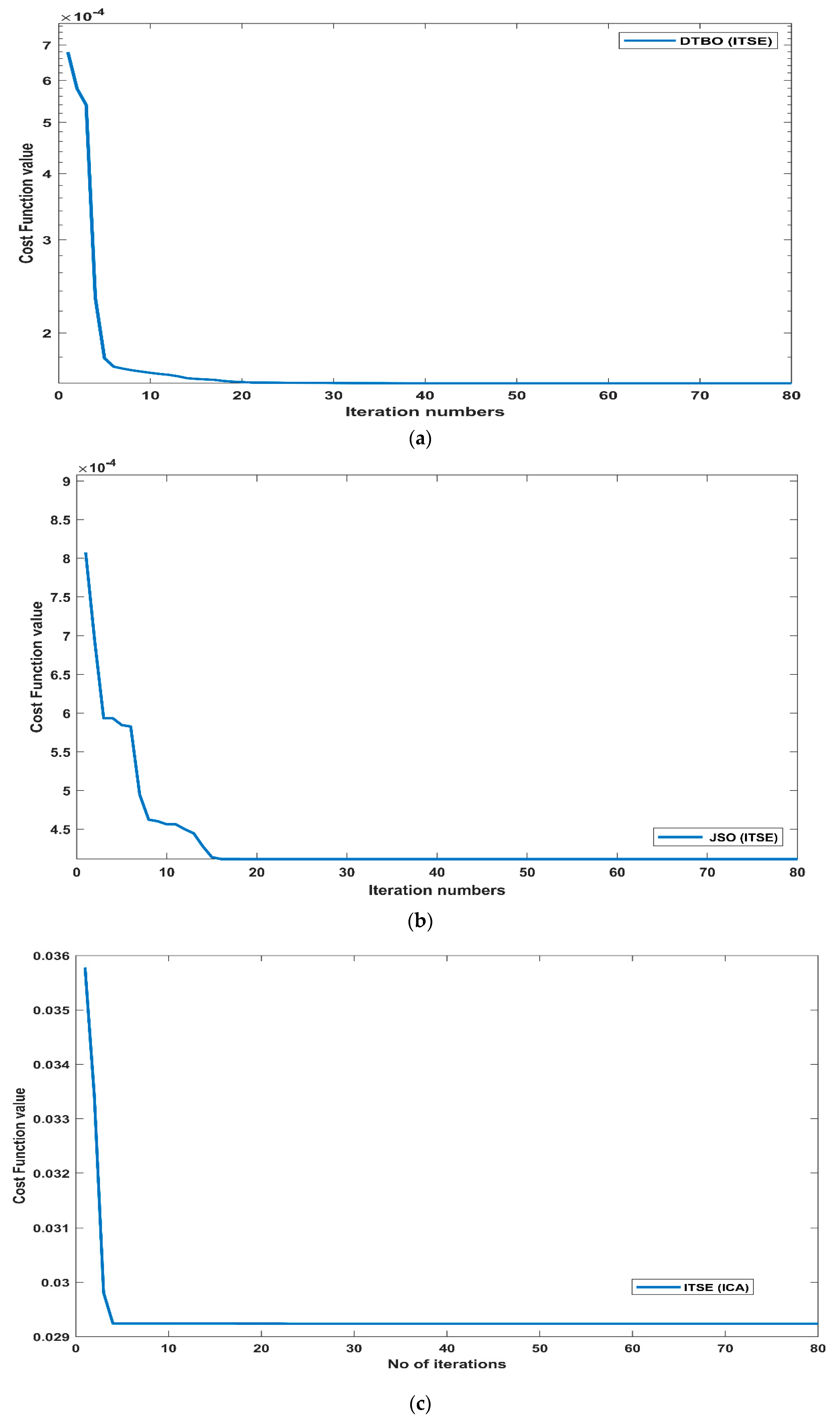
- The performance of the suggested LFC technique is enhanced using driver–teacher-based optimization (DTBO), which optimally selects the parameters of the suggested controller. The outcomes of DTBO are contrasted with those of other contemporary meta-heuristic algorithms, including the ICA and JSO.
- To ensure the viability of the system, a variety of non-linearities, such as time delay (TD), governor dead zone (GDZ), boiler dynamic (BD), and generation rate limitations (GRL), have been examined for the proposed hybrid power system.
- A synchronized participation of EVs with current-generating power units is offered using the proposed FOPI-PDF central controller.
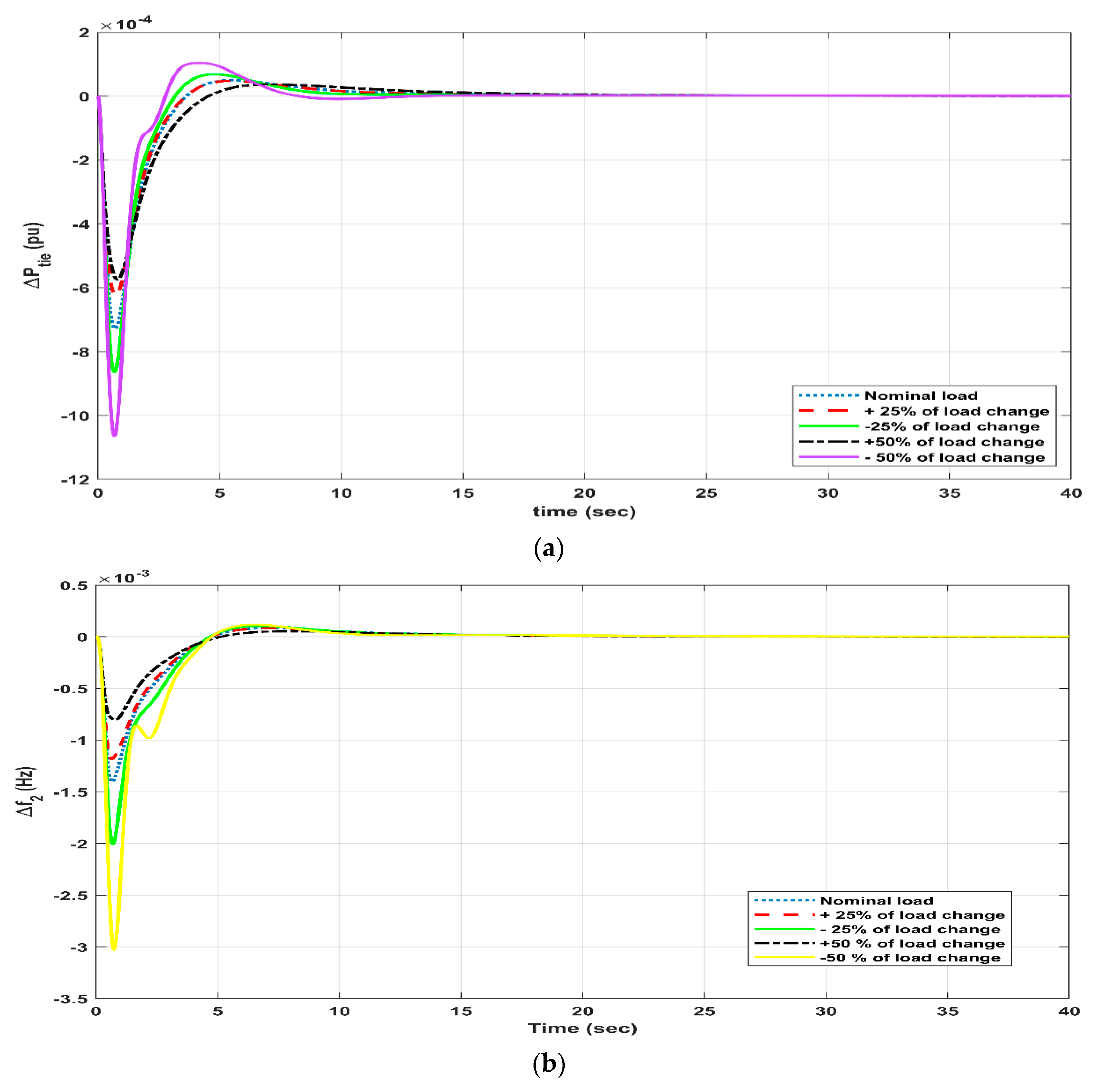
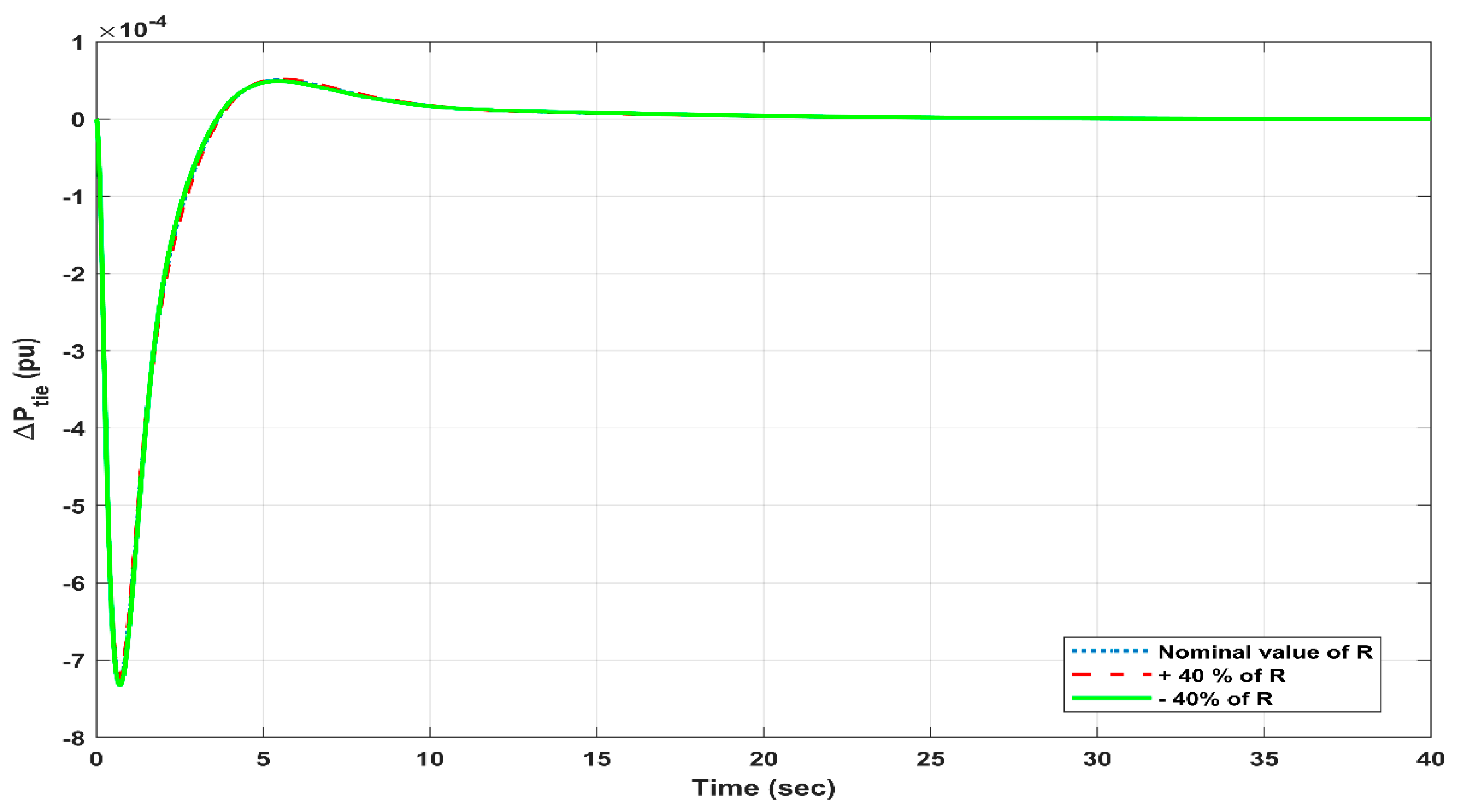
- Finally, utilizing load changes of ±25% and ±50% and system parameters within a ±40% tolerance, the suggested cascaded controller’s robustness is verified.
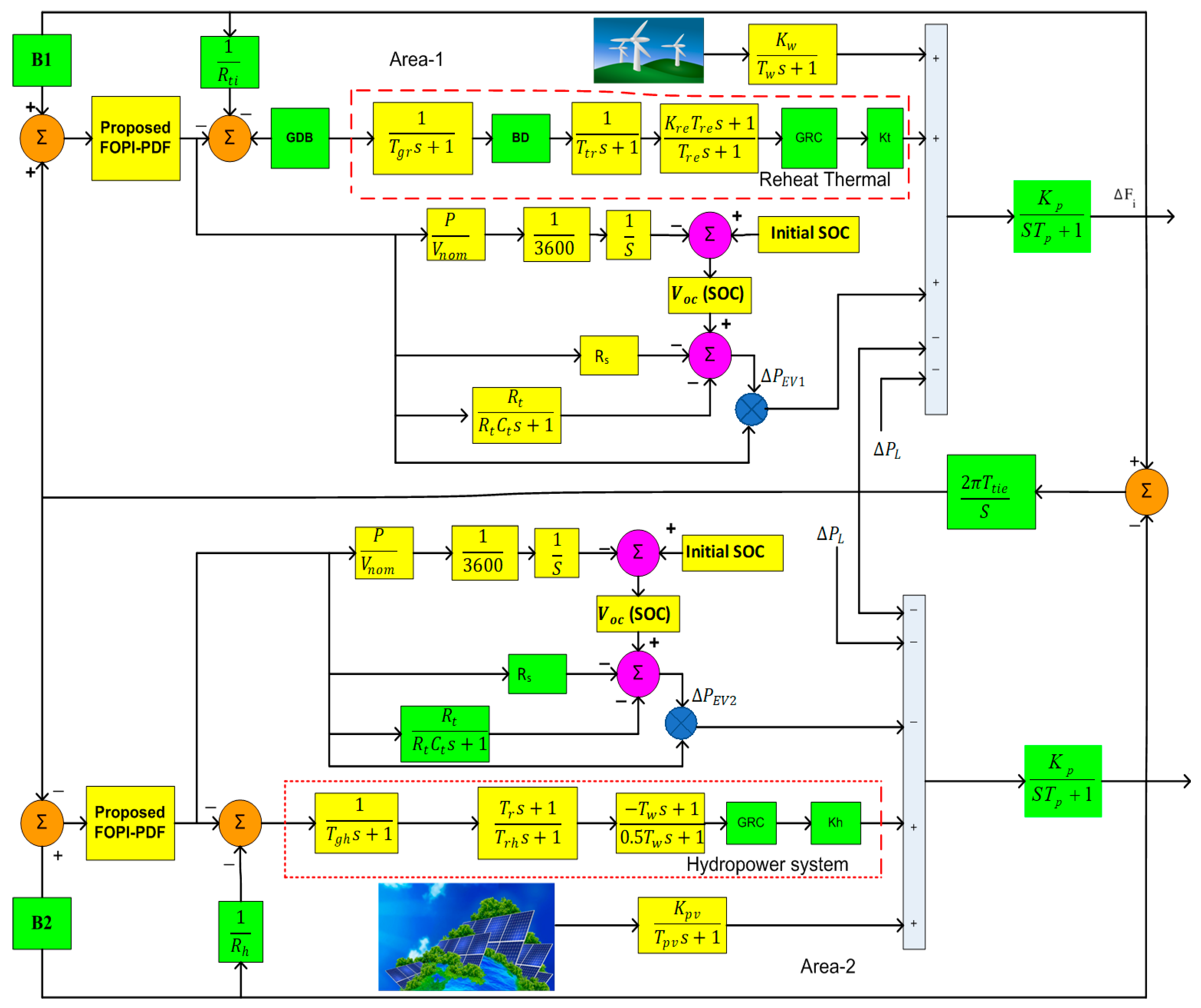
2. Power System Investigation
2.1. Modeling of Conventional Power Systems
2.2. Renewable Energy Resources (RES,s) Modelling
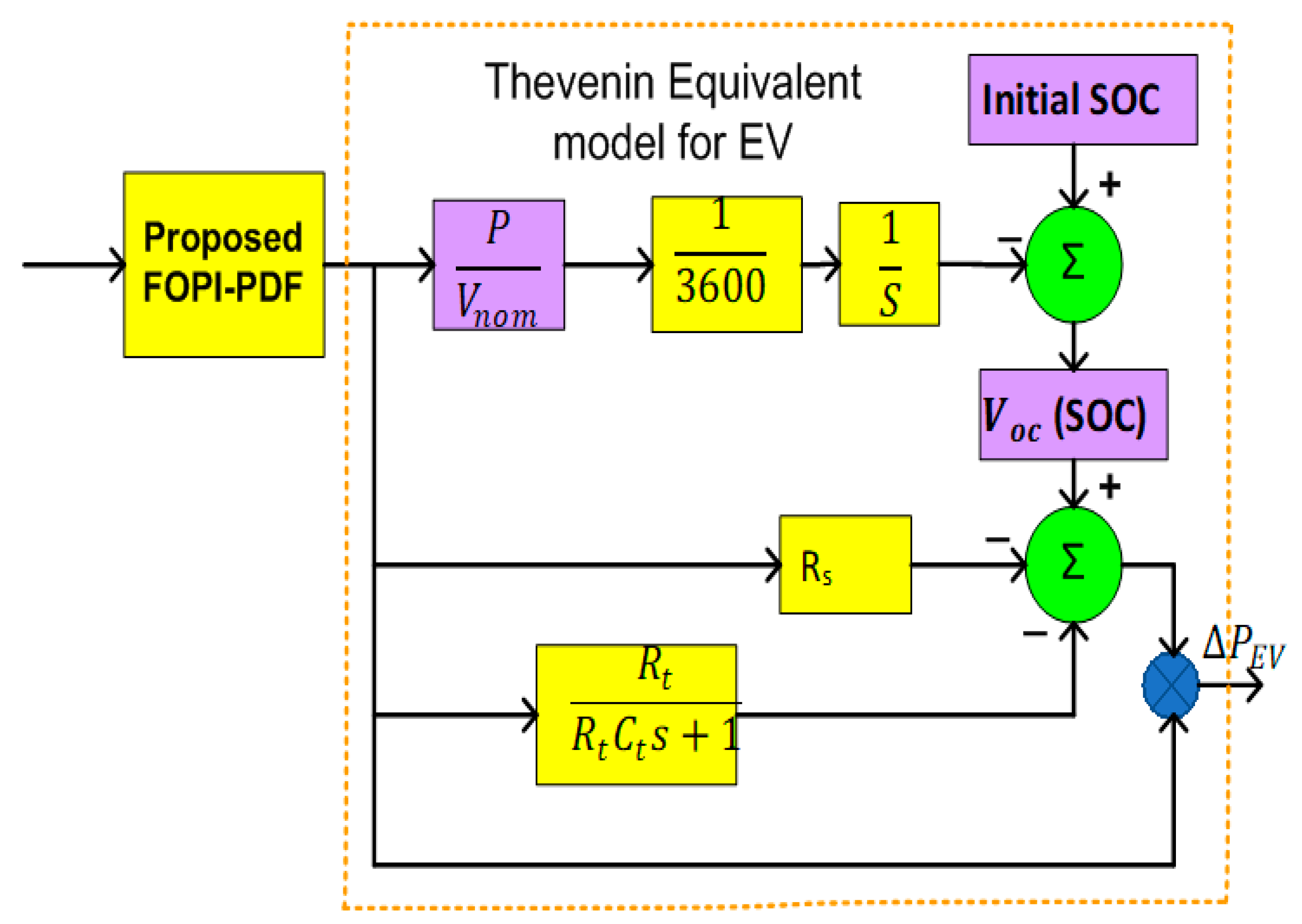
2.3. Modeling of EV Systems
3. Driving Training Based Optimization (DTBO)
3.1. Mathematical Representations of DTBO
3.2. Phase 1: (Learner Driver Training by a Driving Instructor)
3.3. Phase-2 (Modeling of Student Behavior after Instructor Techniques)
3.4. Phase 3 (Practice)
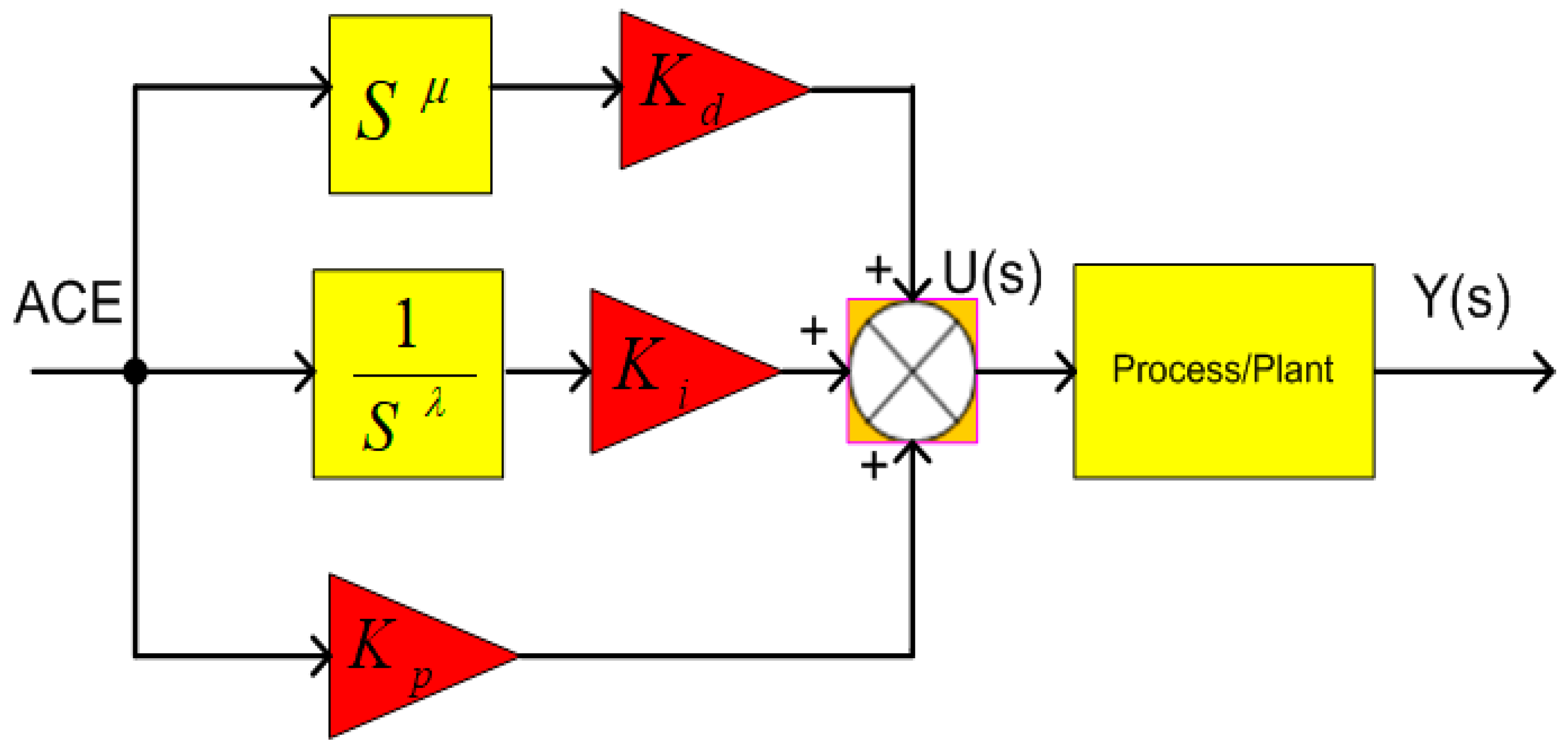
4. Proposed Control Structure and Fitness Function
5. Implementation, Results and Discussion
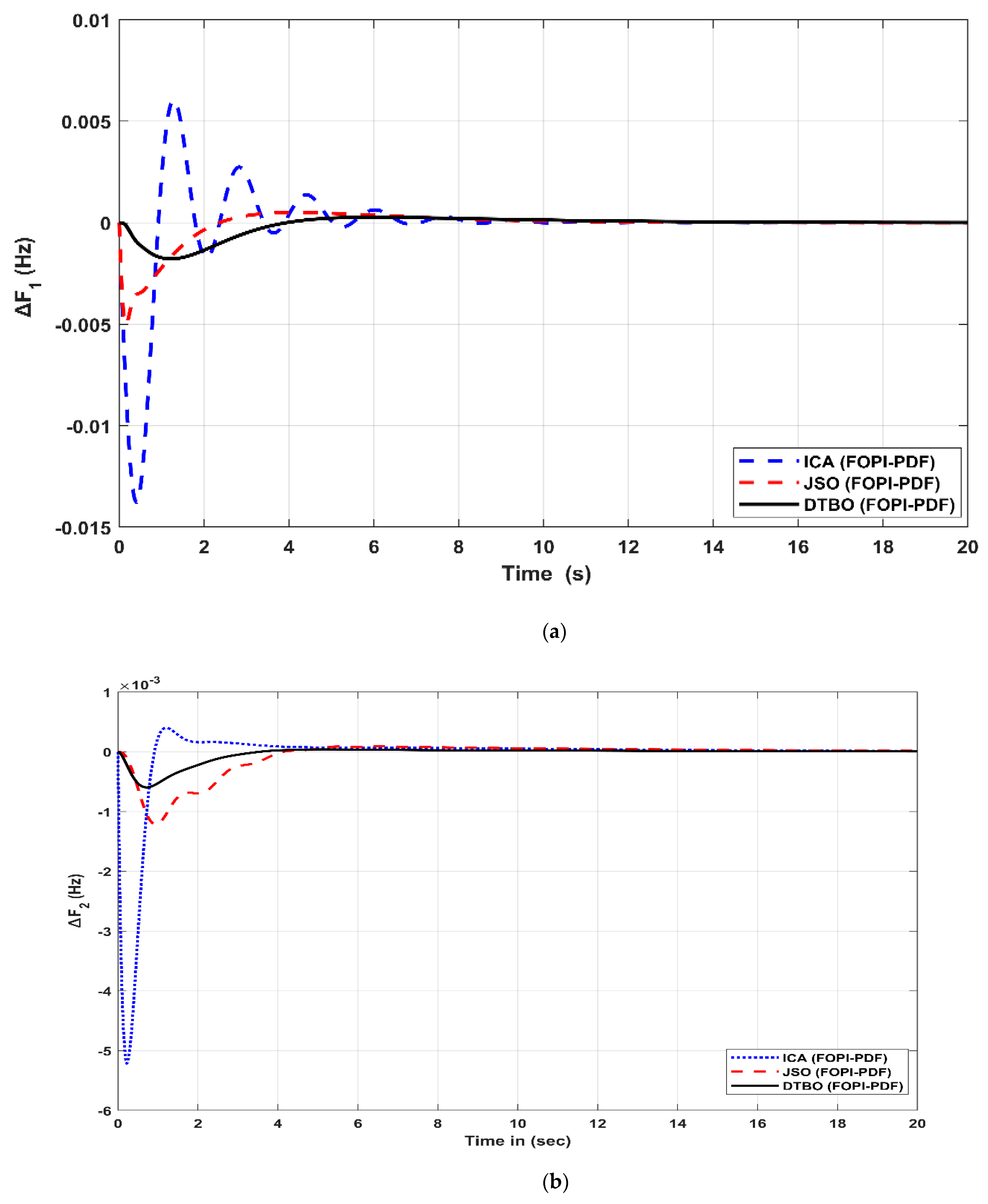
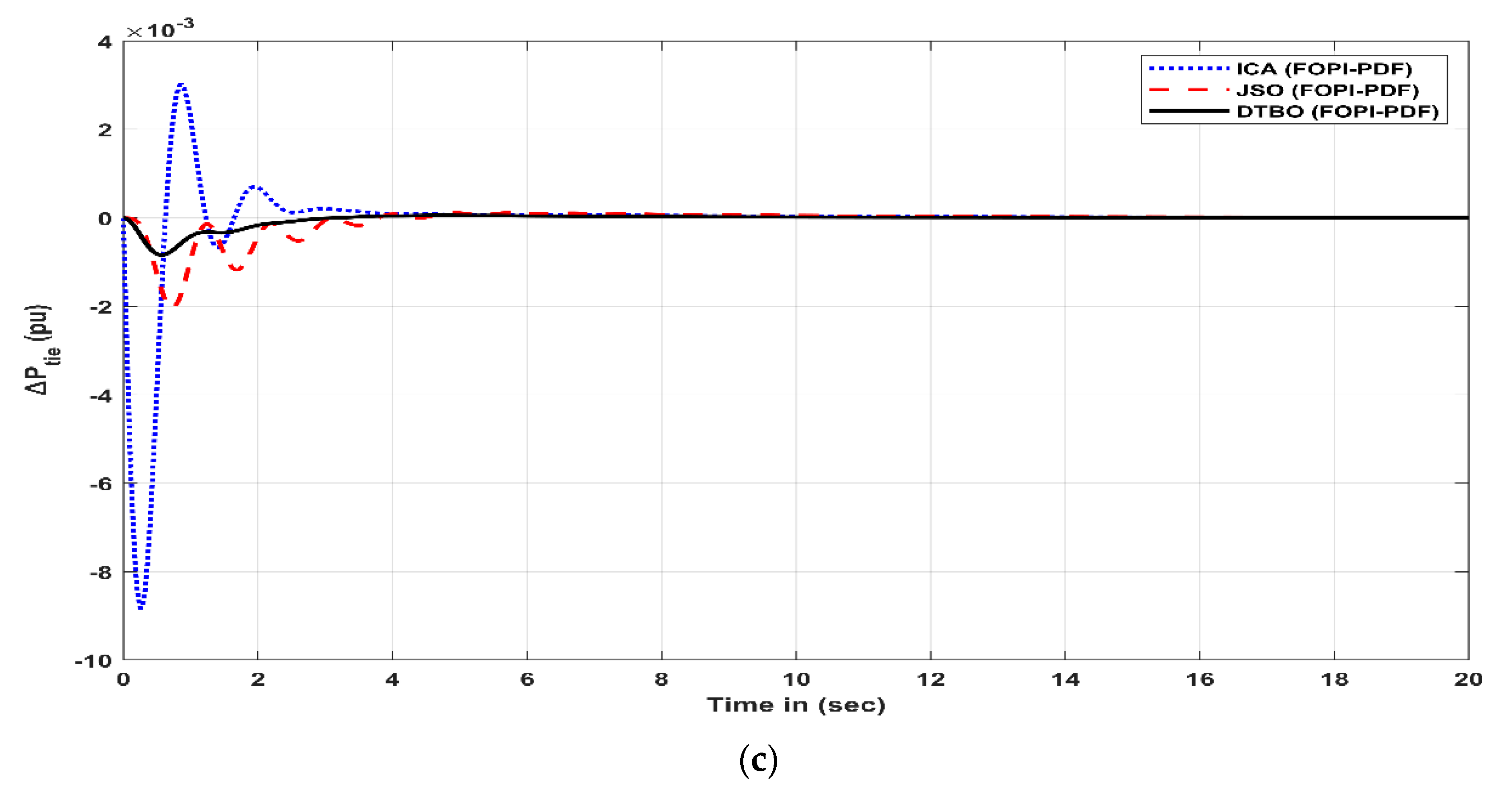
5.1. Case-1
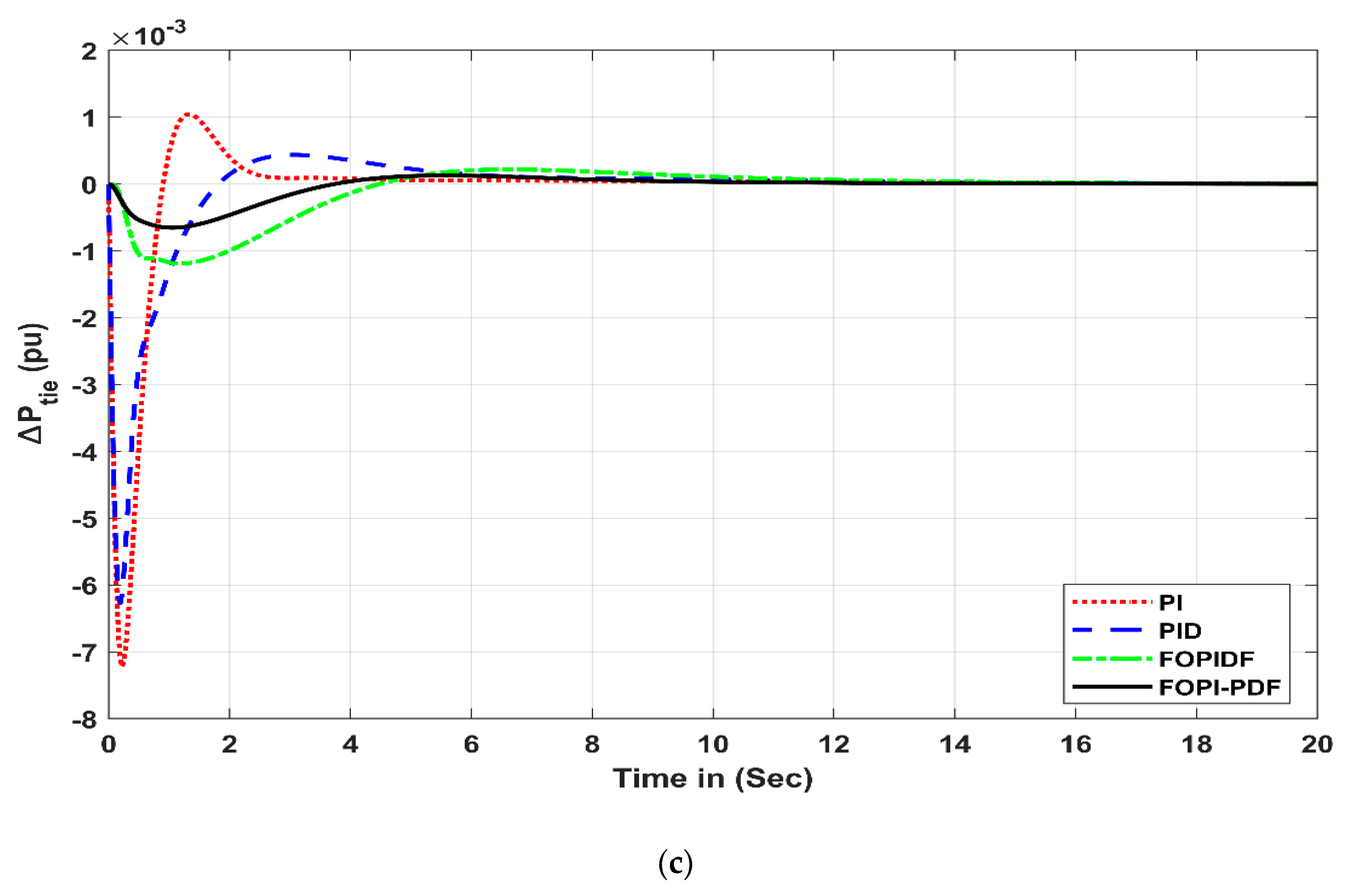
5.2. Case-2
5.3. Case-3
5.4. Sensitivity Analysis/Rubustness
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LFC model | |||
| Parameter | Value | Parameter | Value |
| Tps1 | 11.49 | Kps1 | 68.97 |
| RH | 2.4 | Kps2 | 68.97 |
| Tps2 | 11.49 | β2 | 0.4312 |
| RT | 2.4 | B1 | 2.4 |
| Reheat Thermal PS | |||
| Kt | 0.54367 | Ttr | 0.3 |
| Tre | 10 | Kre | 0.3 |
| Tgr | 0.08 | ||
| Parameters and their values for Electric Vehicles | |||
| Vnom | 364.8 | Cnom | 66.2 |
| Rs | 0.074 | Rt | 0.047 |
| Ct | 703.6 | RT/F | 0.02612 |
| Minimum SOC (in Percentage) | 10 | Maximum SOC (in Percentage) | 95 |
| CBatt | 24.15 | ||
| Hydro Power System | |||
| Tw | 1 | Trh | 28.749 |
| Kh | 0.32586 | Tr | 5 |
| Tgh | 0.2 | ||
| Renewable energy resources | |||
| Ks | 0.5 | KT | 1 |
| Ts | 1 | TT | 0.3 |
| KWTG | 1 | TWTG | 1.5 |
| Boiler Dynamic | |||
| Cb | 200 | K3 | 0.92 |
| Trb | 0.545 | Tf | 0.23 |
| Tr | 1.4 | Trh | 28.75 |
| K1 | 0.85 | K2 | 0.095 |
| T1b | 0.545 | K1b | 0.950 |
Appendix B
| Coefficient | Values | Coefficient | Values | Coefficient | Values | Coefficient | Values |
|---|---|---|---|---|---|---|---|
| No of Iteration | 80 | Lower limit (Lb) | −2 | No of dimension | 7 | Coefficient | 2 |
| No of Population (Np) | 30 | Constant (R) | 0.05 | Random Number (r) | [0, 1] | Coefficient |
References
- Jan, M.U.; Xin, A.; Abdelbaky, M.A.; Rehman, H.U.; Iqbal, S. Adaptive and Fuzzy PI Controllers Design for Frequency Regulation of Isolated Microgrid Integrated With Electric Vehicles. IEEE Access 2020, 8, 87621–87632. [Google Scholar] [CrossRef]
- Hassan, A.; Aly, M.; Elmelegi, A.; Nasrat, L.; Watanabe, M.; Mohamed, E.A. Optimal Frequency Control of Multi-Area Hybrid Power System Using New Cascaded TID-PIλDμN Controller Incorporating Electric Vehicles. Fractal Fract. 2022, 6, 548. [Google Scholar] [CrossRef]
- Xiao, D.; Chen, H.; Wei, C.; Bai, X. Statistical Measure for Risk-Seeking Stochastic Wind Power Offering Strategies in Electricity Markets. J. Mod. Power Syst. Clean Energy 2021, 10, 1437–1442. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Murawwat, S.; Sibtain, D.; Shahid, K.; Javed, I.; Gui, Y. Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems. Energies 2022, 15, 7814. [Google Scholar] [CrossRef]
- Zhang, P.; Daraz, A.; Malik, S.A.; Sun, C.; Basit, A.; Zhang, G. Multi-resolution based PID controller for frequency regulation of a hybrid power system with multiple interconnected systems. Front. Energy Res. 2023, 10, 1109063. [Google Scholar] [CrossRef]
- Arya, Y. Effect of electric vehicles on load frequency control in interconnected thermal and hydrothermal power systems utilizing CFFOIDF controller. IET Gener. Transm. Distrib. 2020, 14, 2666–2675. [Google Scholar] [CrossRef]
- Zaid, S.A.; Bakeer, A.; Magdy, G.; Albalawi, H.; Kassem, A.M.; El-Shimy, M.E.; AbdelMeguid, H.; Manqarah, B. A New Intelligent Fractional-Order Load Frequency Control for Interconnected Modern Power Systems with Virtual Inertia Control. Fractal Fract. 2023, 7, 62. [Google Scholar] [CrossRef]
- Jia, H.; Li, X.; Mu, Y.; Xu, C.; Jiang, Y.; Yu, X.; Wu, J.; Dong, C. Coordinated control for EV aggregators and power plants in frequency regulation considering time-varying delays. Appl. Energy 2018, 210, 1363–1376. [Google Scholar] [CrossRef]
- Arias, N.B.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. Assessment of economic bene_ts for EV owners participating in the primary frequency regulation markets. Int. J. Electr. Power Energy Syst. 2020, 120, 105985. [Google Scholar] [CrossRef]
- Khamari, D.; Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of power system in deregulated environment using hybrid TLBO and pattern search technique. Ain Shams Eng. J. 2019, 11, 553–573. [Google Scholar] [CrossRef]
- Vrdoljak, K.; Peri´c, N.; Petrovi´c, I. Sliding modelbased load-frequency control in power systems. Electr. Power Syst. Res. 2010, 80, 514–527. [Google Scholar] [CrossRef]
- Pan, C.; Liaw, C. An adaptive controller for power system load-frequency control. IEEE Trans. Power Syst. 1989, 4, 122–128. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. BFOA-scaled fractional order fuzzy PID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm Evol. Comput. 2017, 32, 202–218. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Biswal, A.; Sekhar, G.C. Design and analysis of tilt integral derivative controller with filter for load frequency control of multi-area interconnected power systems. ISA Trans. 2016, 61, 251–264. [Google Scholar] [CrossRef]
- Malik, S.; Suhag, S. A Novel SSA Tuned PI-TDF Control Scheme for Mitigation of Frequency Excursions in Hybrid Power System. Smart Sci. 2020, 8, 202–218. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M.; Mohamed, A.A.A.; Elbaksawi, O. Optimized Tilt Fractional OrderCooperative Controllers for Preserving Frequency Stability in Renewable Energy-Based Power Systems. IEEE Access 2021, 9, 8261–8277. [Google Scholar] [CrossRef]
- Arya, Y. A new optimized fuzzy FOPI-FOPD controller for automatic generation control of electric power systems. J. Frankl. Inst. 2019, 356, 5611–5629. [Google Scholar] [CrossRef]
- Paliwal, N.; Srivastava, L.; Pandit, M. Application of grey wolf optimization algorithm for load frequency control in multi-source single area power system. Evol. Intell. 2020, 15, 563–584. [Google Scholar] [CrossRef]
- Ayas, M.S.; Sahin, E. FOPID controller with fractional filter for an automatic voltage regulator. Comput. Electr. Eng. 2021, 90, 106895. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology-based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Azar, A.T.; Aslam, S.; Alkhalifah, T.; Alturise, F. Optimized Fractional Order Integral-Tilt Derivative Controller for Frequency Regulation of Interconnected Diverse Renewable Energy Resources. IEEE Access 2022, 10, 43514–43527. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Muyeen, S.M.; Oshnoei, S.; Blaabjerg, F. Automatic Generation Control Incorporating Electric Vehicles. Electr. Power Components Syst. 2019, 47, 720–732. [Google Scholar] [CrossRef]
- Magdy, G.; Bakeer, A.; Nour, M.; Petlenkov, E. A new virtual synchronous generator design based on the SMES system for frequency stability of low-inertia power grids. Energies 2020, 13, 5641. [Google Scholar] [CrossRef]
- Arya, Y. Impact of ultra-capacitor on automatic generation control of electric energy systems using an optimal FFOID controller. Int. J. Energy Res. 2019, 43, 8765–8778. [Google Scholar] [CrossRef]
- Priyadarshani, S.; Subhashini, K.R.; Satapathy, J.K. Path finder algorithm optimized fractional order tilt-integral-derivative (FOTID) controller for automatic generation control of multi-source power system. Microsyst. Technol. 2020, 27, 23–35. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Basit, A.; Aslam, S.; Zhang, G. Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources. Fractal Fract. 2023, 7, 89. [Google Scholar] [CrossRef]
- Arya, Y. Impact of hydrogen Aqua electrolyzer-fuel cell units on automaticgeneration control of power systems with a new optimal fuzzy TIDFII controller. Renew. Energy 2019, 139, 468–482. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Aly, M.; Watanab, M. New Tilt Fractional-Order Integral Derivative with Fractional Filter (TFOIDFF)Controller with Artificial Hummingbird Optimizer for LFC in Renewable Energy Power Grids. Mathematics 2022, 10, 3006. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A.A. Salp swarm algorithm-based optimal load frequency control of hybrid renewable power systems with communication delay and excitation cross-coupling effect. Electr. Power Syst. Res. 2019, 176, 105938. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimum synthesis of a BOA optimized novel dual-stage PI-(1 C ID) controller for frequency response of a microgrid. Energies 2020, 13, 3446. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N.; Dahiya, P.; Sharma, G.; Çelik, E.; Dhundhara, S.; Sharma, M. Cascade-IDN controller design for AGC of thermal and hydro-thermal power systems integrated with renewable energy sources. IET Renew. Power Gener. 2020, 15, 504–520. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Selim, A.; Kamel, S. An improved Rao algorithm for frequency stability enhancement of nonlinearpower system interconnected by AC/DC links with high renewables penetration. Neural Comput. Appl. 2021, 34, 2883–2911. [Google Scholar] [CrossRef]
- Ali, H.H.; Fathy, A.; Kassem, A.M. Optimal model predictive control for LFC of multi-interconnected plants comprising renewable energy sources based on recent sooty terns approach. Sustain. Energy Technol. Assess. 2020, 42, 100844. [Google Scholar] [CrossRef]
- Dehghani, M.; Trojovská, E.; Trojovský, P. A new human-based metaheuristic algorithm for solving optimization problems on the base of simulation of driving training process. Sci. Rep. 2022, 12, 9924. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, A.; Sibtain, D.; Khalid, M. An Innovative Converterless Solar PV Control Strategy for a Grid Connected Hybrid PV/Wind/Fuel-Cell System Coupled with Battery Energy Storage. IEEE Access 2023, 11, 23245–23259. [Google Scholar] [CrossRef]
- Yakout, A.H.; Kotb, H.; Hasanien, H.M.; Aboras, K.M. Optimal Fuzzy PIDF Load Frequency Controller for Hybrid Microgrid System Using Marine Predator Algorithm. IEEE Access 2021, 9, 54220–54232. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Beshr, E.; Eteiba, M.B.; Allam, D. A robust strategy based on marine predators algorithm for large scale photovoltaic array reconguration to mitigate the partial shading effect onthe performance of PV system. IEEE Access 2020, 8, 112407–112426. [Google Scholar]
- Elkasem, A.H.A.; Kamel, S.; Hassan, M.H.; Khamies, M.; Ahmed, E.M. An Eagle Strategy Arithmetic Optimization Algorithm for Frequency Stability Enhancement Considering High Renewable Power Penetration and Time-Varying Load. Mathematics 2022, 10, 854. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for FutureElectric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Ali, T.; Malik, S.A.; Daraz, A.; Aslam, S.; Alkhalifah, T. Dandelion Optimizer-Based Combined Automatic Voltage Regulation and Load Frequency Control in a Multi-Area, Multi-Source Interconnected Power System with Nonlinearities. Energies 2022, 15, 8499. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.A.A. An Optimized Hybrid Fractional Order Controller for Frequency Regulation in Multiarea Power Systems. IEEE Access 2020, 8, 213899–213915. [Google Scholar] [CrossRef]
- Sahu, R.; Gorripotu, T.; Panda, S. A hybrid DE-PS algorithm for load frequency control under deregulated power system withUPFC and RFB. Ain Shams Eng. J. 2015, 6, 893–911. [Google Scholar] [CrossRef] [Green Version]
- Tasnin, W.; Saikia, L.C.; Raju, M. Deregulated AGC of multi-area system incorporating dish-Stirling solar thermal and geothermalpower plants using fractional order cascade controller. Int. J. Electr. Power Energy Syst. 2018, 101, 60–74. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Selim, A.; Alnuman, H.; Alhosaini, W.; Aly, M.; Mohamed, E.A. Modified Frequency Regulator Based on TIλ-TDμFF Controller for Interconnected Microgrids with Incorporating Hybrid Renewable Energy Sources. Mathematics 2023, 11, 28. [Google Scholar] [CrossRef]
- Micev, M.; Calasan, M.; Oliva, D. Fractional Order PID Controller Design for an AVR System Using Chaotic Yellow Saddle Goatfish Algorithm. Mathematics 2020, 8, 1182. [Google Scholar] [CrossRef]





| Parameters | Case-1 | Case-2 | |||||
|---|---|---|---|---|---|---|---|
| DTBO | JSO | ICA | FOPI-PDF | FOPIDF | PID | PI | |
| Kp1 | 1.998 | 1.877 | 1.900 | 1.098 | 1.950 | 1.405 | 1.893 |
| Ki1 | 1.678 | 1.458 | 0.400 | 1.878 | 1.340 | 1.012 | 1.032 |
| Kd1 | 1.998 | 1.877 | 1.200 | 1.998 | 0.902 | 1.405 | - |
| Kp2 | 0.345 | 0.123 | 1.145 | 1.889 | - | - | - |
| λ1 | 0.710 | 0.556 | 1.620 | 0.710 | 0.620 | - | - |
| μ1 | 0.671 | 0.601 | 1.863 | 0.671 | 0.823 | - | - |
| N1 | 8.678 | 3.234 | 9.972 | 8.678 | 9.972 | - | 9.899 |
| Kp3 | 1.678 | 1.234 | 2.000 | 1.678 | 2.000 | 1.232 | 1.767 |
| Kd2 | 1.998 | 1.877 | 1.405 | 1.998 | 1.989 | 1.405 | - |
| Kp4 | 0.644 | 1.990 | 1.235 | 1.009 | - | - | - |
| μ2 | 0.710 | 0.456 | 0.620 | 0.710 | 0.620 | - | - |
| λ2 | 0.878 | 0.972 | 0.678 | 0.878 | 0.678 | - | - |
| N2 | 9.900 | 9.897 | 7.893 | 9.900 | 7.894 | - | - |
| Techniques | ST (Settling Time) | MO (Maximum Overshoot) | MU (Minimum Undershoot) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Area 1 | Area 2 | (∆Ptie) | Area 1 | Area 2 | (∆Ptie) | Area 1 | Area 2 | (∆Ptie) | |
| DTBO: FOPI-PDF | 8.23 | 3.93 | 2.96 | 0.000041 | 0.000272 | 0.000000 | −0.00059 | −0.00178 | −0.00084 |
| JSO: FOPI-PDF | 8.09 | 9.13 | 7.83 | 0.000090 | 0.000509 | 0.000127 | −0.00121 | −0.00500 | −0.00202 |
| ICA: FOPI-PDF | 10.4 | 6.44 | 4.68 | 0.000402 | 0.006035 | 0.003012 | −0.00521 | −0.01376 | −0.00883 |
| [10] hTLBO-PS | 13.7 | 9.53 | 10.36 | 0.070400 | 0.007222 | 0.003500 | −0.24010 | −0.18888 | −0.06330 |
| [42] hDE-PS | 19.0 | 18.09 | 12.69 | 0.00080 | 0.001700 | 0.000600 | −0.00100 | −0.01500 | −0.00800 |
| [25] FPA | 25.5 | 23.2 | 18.77 | 0.00680 | 0.01170 | 0.00260 | −0.02450 | −0.02288 | −0.00440 |
| Controllers | ST (Settling Time) | MO (Maximum Overshoot) | MU (Minimum Undershoot) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Area 1 | Area 2 | (∆Ptie) | Area 1 | Area 2 | (∆Ptie) | Area 1 | Area 2 | (∆Ptie) | |
| FOPI-PDF: DTBO | 8.434 | 10.9 | 5.98 | 0.000813 | 0.000813 | 0.000129 | −0.00922 | −0.00922 | −0.00065 |
| FOPIDF: DTBO | 4.420 | 8.61 | 12.6 | 0.000082 | 0.000406 | 0.000218 | −0.00135 | −0.00179 | −0.00119 |
| PID: DTBO | 5.020 | 6.23 | 8.83 | 0.000363 | 0.000048 | 0.000437 | −0.00664 | −0.00628 | −0.00627 |
| PI:DTBO | 6.533 | 9.93 | 6.82 | 0.000017 | 0.000041 | 0.001045 | −0.00094 | −0.00104 | −0.00722 |
| [42] MID: hDE-PS | 19.01 | 18.09 | 12.69 | 0.00080 | 0.001700 | 0.000600 | −0.00100 | −0.01500 | −0.00800 |
| [25] FOTID:FPA | 25.5 | 23.2 | 18.77 | 0.00680 | 0.01170 | 0.00260 | −0.02450 | −0.0228 | −0.00440 |
| Parameter | % Change | ST | MO | MU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Area 1 | Area 1 | ∆Ptie | Area 1 | Area 1 | (∆Ptie) | Area 1 | Area 1 | (∆Ptie) | ||
| Kw | +40 | 6.09 | 13.23 | 14.89 | 0.00031 | 0.00032 | 0.00063 | −0.00251 | −0.00830 | −0.00623 |
| −40 | 7.82 | 13.23 | 14.90 | 0.00031 | 0.00031 | 0.00061 | −0.00257 | −0.00840 | −0.00618 | |
| Kre | +40 | 6.38 | 13.45 | 14.21 | 0.0002 | 0.00037 | 0.00094 | −0.00489 | −0.00713 | −0.00693 |
| −40 | 8.03 | 13.46 | 14.23 | 0.0002 | 0.00030 | 0.00098 | −0.00482 | −0.00913 | −0.00678 | |
| R | +40 | 6.10 | 12.79 | 14.60 | 0.0003 | 0.00014 | 0.00083 | −0.00361 | −0.00780 | −0.00731 |
| −40 | 7.80 | 12.80 | 14.61 | 0.0003 | 0.00017 | 0.00075 | −0.00361 | −0.00740 | −0.00725 | |
| Tgr | +40 | 3.47 | 12.72 | 14.09 | 0.0003 | 0.00068 | 0.00064 | −0.00315 | −0.00240 | −0.00610 |
| −40 | 3.51 | 12.73 | 14.10 | 0.0002 | 0.00047 | 0.00054 | −0.00313 | −0.00236 | −0.00600 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Daraz, A.; Khan, I.A.; Basit, A.; Khan, M.I.; Ullah, M. Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System. Fractal Fract. 2023, 7, 315. https://doi.org/10.3390/fractalfract7040315
Zhang G, Daraz A, Khan IA, Basit A, Khan MI, Ullah M. Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System. Fractal and Fractional. 2023; 7(4):315. https://doi.org/10.3390/fractalfract7040315
Chicago/Turabian StyleZhang, Guoqiang, Amil Daraz, Irfan Ahmed Khan, Abdul Basit, Muhammad Irshad Khan, and Mirzat Ullah. 2023. "Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System" Fractal and Fractional 7, no. 4: 315. https://doi.org/10.3390/fractalfract7040315
APA StyleZhang, G., Daraz, A., Khan, I. A., Basit, A., Khan, M. I., & Ullah, M. (2023). Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System. Fractal and Fractional, 7(4), 315. https://doi.org/10.3390/fractalfract7040315