1. Introduction
A mathematical equation with nonlinear terms and partial derivatives of a function is called a nonlinear partial differential equation (NPDE). NPDEs capture more intricate interactions than linear PDEs, which only show strictly proportional relationships between variables. These equations are essential for simulating various complex and dynamic processes in many scientific and engineering fields. Applications may be found in various domains, including population dynamics, wave propagation, heat conduction with nonlinear material characteristics, and fluid dynamics. Nonlinear partial differential equations (PDEs) are essential for understanding and forecasting complicated behaviors seen in the natural world. They provide significant insights into system functioning, displaying complex and non-proportional connections among their constituent parts [
1,
2].
Many physical processes, which have recently attracted interest due to their potential applications in science and engineering, rely heavily on the solutions of fractional differential equations. Hadamard, Riemann-Liouville, Atangana-Baleanu, Caputo-Fabrizio, and Liouville-Caputo [
3,
4,
5,
6] are only a few of the authors who have presented new definitions of fundamental fractional derivatives. After computing an ordinary derivative and a fractional integral, as in the Caputo fractional derivative, the desired order of a fractional derivative is achieved. The process goes in the other direction when computing the Riemann-Liouville fractional derivative. In contrast to the Riemann-Liouville fractional derivative, the Caputo fractional derivative is restricted to just classical starting and boundary conditions [
7]. A wide range of scientific and technological fields have used nonlinear models, including hydrology, astrophysics, meteorology, nuclear engineering, and astrobiology [
8,
9]. Most fractional-order nonlinear models are still challenging to solve. These models are thus essential for investigating the exact and numerical answers [
10,
11]. The papers mentioned encompass diverse research areas in applied sciences and engineering. The first paper explores a novel fractional-order memristor-based clamping voltage drift, emphasizing characteristic analysis and circuit implementation [
12]. The second paper delves into H-
∞ consensus within multiagent-based supply chain systems under uncertain demands and switching topology [
13]. The third paper focuses on opinion formation analysis in Expressed and Private Opinions (EPOs) models, elucidating private opinion development from behaviors in group decision-making systems [
14].
Neural communication through electrical signaling with nerve signals is one of the biological systems with inspired action that has been explored the most. Hodgin and Huxley modeled this scenario in 1952 [
15]. Simplifying the model yields the generalized Fitzhugh-Nagumo equation, the most well-known mathematical description of the excitation and propagation of nerve impulses. This equation contains time-dependent coefficients for the membrane potential of every nerve axon [
16]. For the last several decades, this equation has piqued the curiosity of both practical mathematicians and theoretical biologists. In addition, it has been used in various fields, including logistic population growth, flame propagation, circuit theory, population genetics, and the branching Brownian motion process [
17]. Additionally, it depicts the ferocious behavior of fluid mixes around the bifurcation point for Rayleigh-Benard convection [
18]. This equation has drawn much interest from mathematicians, biologists, and physicists because of its significance in many applicable fields of modern research.
Consider the following generalized Fitzhugh-Nagumo equation in this work, which is provided by
having the initial condition
where
is a constant and the unknown function
relies on the time variable
and the space variable
, where
,
, and
are real valued functions. For
and
, Equation (
1) becomes a simple Fitzhugh-Nagumo equation
The variables and parameters in Equation (
1) represent the following physical and mathematical quantities:
typically represents the membrane potential, a key variable in the Fitzhugh-Nagumo equation. It describes the cell’s electric potential deviation from its resting potential.
is often associated with the recovery time of the excitable cell or neuron. It characterizes the rate at which the cell’s membrane potential returns to its resting state after depolarization.
may be related to the cell’s susceptibility to external stimuli or perturbations. It can influence the cell’s response to changes in its environment. Functions
,
and
are likely to be auxiliary functions or coefficients that modulate the behavior of the system. These functions may represent specific interactions or feedback mechanisms within the cell. Parameter
often represents a scaling factor or a characteristic parameter that influences the dynamics of the Fitzhugh-Nagumo equation. It can affect the speed of signal propagation and the shape of the action potential.
The Fitzhugh-Nagumo Equation (
1) is a simplified model of excitable systems, such as neurons, cardiac cells, or other excitable media. It describes the dynamics of action potentials and the cell’s response to external stimuli. The system’s behavior typically includes the generation of action potentials in response to a stimulus and the recovery of the cell’s membrane potential after depolarization. The specific behavior can vary depending on the values of the parameters and initial conditions, but it often exhibits oscillations and excitability, which are critical features of excitable systems. It is essential to provide a clear physical interpretation of the variables and parameters to enhance the understanding of the model’s significance in real-world applications. Additionally, describing the typical behavior of the equation helps readers grasp its fundamental characteristics.
NPDEs may be used to design various scientific phenomena, as in the case of the generalized Fitzhugh-Nagumo equation with time-dependent coefficients. Often, solving NPDE problems analytically or even numerically is confusing. As a result, a variety of analytical, semi-analytical, and numerical techniques are developed to handle this task, including the trial equation method [
19], the sine-cosine method [
20,
21], the optimal homotopy asymptotic method [
22,
23], the Chebyshev spectral collocation method [
24], the Adomian decomposition method [
25], the homotopy decomposition method [
26], and the optimal q-homotopy analysis method [
27].
Utilizing the residual power series (RPS) approach, numerous varieties of ordinary, partial, fuzzy differential, and integro-differential equations of fractional order can be solved numerically and analytically. As an effective optimization strategy, it provides solutions in closed forms of well-established functions. The RFPS technique has been employed to resolve a variety of fractional integral equations, ambiguous FDEs, and FDEs. As an example, consider the fractional-order Newell-Whitehead-Segel equation [
28], time-fractional Fokker-Planck models [
29], massive Thirring and time-fractional Kundu-Eckhaus equations [
30], coupled fractional resonant Schrodinger equations [
31], fractional partial differential equations [
32], Fredholm fractional integral differential equations of order 2b [
33], specific categories of fuzzy fractional differential equations [
34], and singular impulse fundamental equations [
35]. Many complicated models arise in areas of the natural sciences, and the Laplace transform technique is a valuable tool for solving them. When used with analytical techniques, the Laplace transform operator allows for more efficient and accurate solutions to nonlinear problems. Combining the Laplace transform with RPS methods, the LRPS method yields rapidly fractional power series (FPS) solutions that are both precise and accurate. Solutions to the resulting algebraic equations are derived once the underlying issue is transformed into Laplace space. The Laplace inverse of the results provides a final solution to the fundamental problem. Limit theory may be used to determine the unknown coefficients in a new Laplace expansion, which is an advantage over the FRPS method since the latter relies on the fractional derivative and requires the computation of several fractional derivatives to obtain the solutions. The LRPS technique has fewer time and accuracy-intensive minor computing requirements [
36,
37,
38,
39]. Similarly, NIM is becoming more popular for resolving complicated, computationally intensive, or nonlinear numerical problems. Because NIM is iterative, it can respond to the unique characteristics of each issue and provide reliable and optimal solutions via dynamic convergence criteria, adaptive step-size modifications, and increased convergence acceleration [
40,
41,
42]. NIM is very useful for solving problems that need accuracy and speed, including those in data processing, numerical modeling, and optimization.
The study introduces two separate approaches for solving nonlinear fractional partial differential equations (NFPDEs), the Laplace Residual Power Series (LRPS) method and the New Iteration Method. The Laplace method uses the LRPS transform to convert the fractional partial differential equation into a form with integer derivatives, allowing for a power series expansion. The accuracy of the LRPS approach is dependent on the convergence of this power series; hence, term selection is crucial. The New Iteration Method, on the other hand, takes an iterative method, adding fractional derivatives directly into the process. This method’s convergence improves with each iteration, providing a numerical strategy for obtaining approximate solutions. While the LRPS approach benefits NFPDEs, the New Iteration approach is more adaptable and applies to a wider range of fractional differential equations. The decision between these methods is determined by the specific characteristics of the equation in question, with each method having its own set of advantages and disadvantages.
6. Numerical Simulations and Discussion
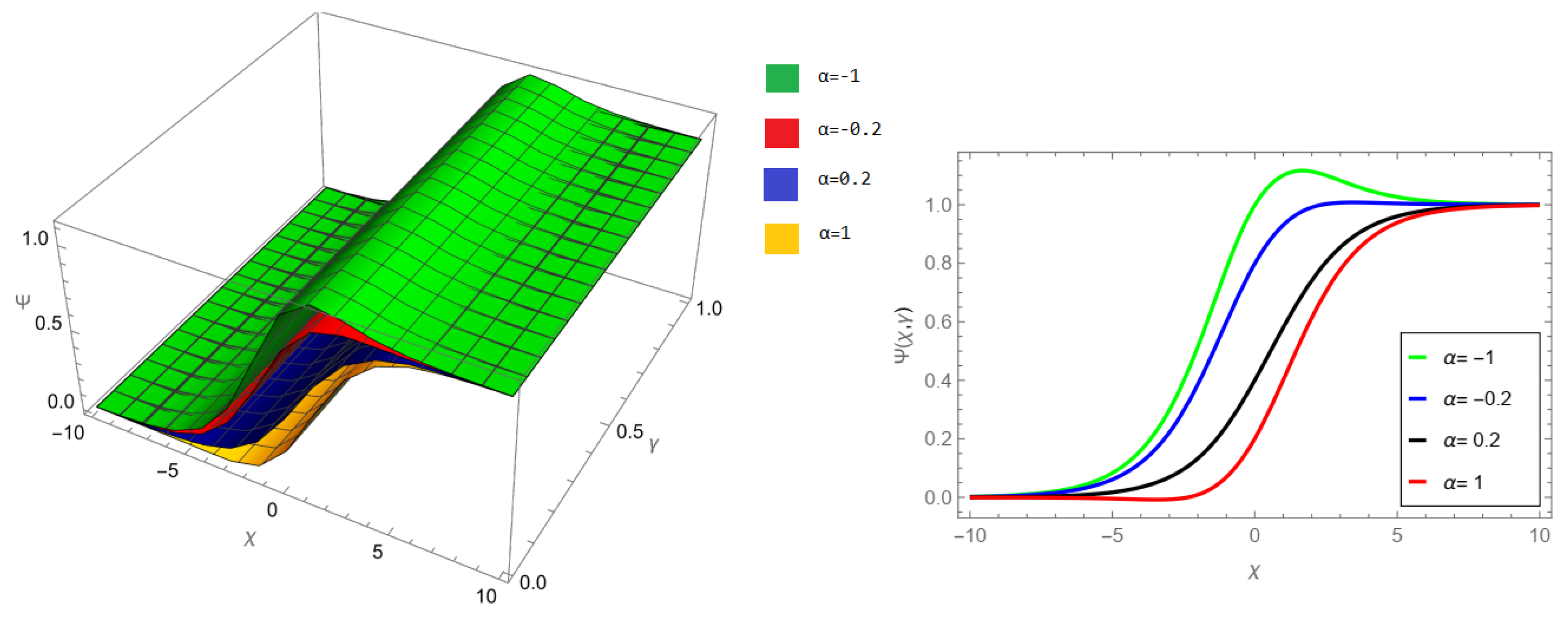
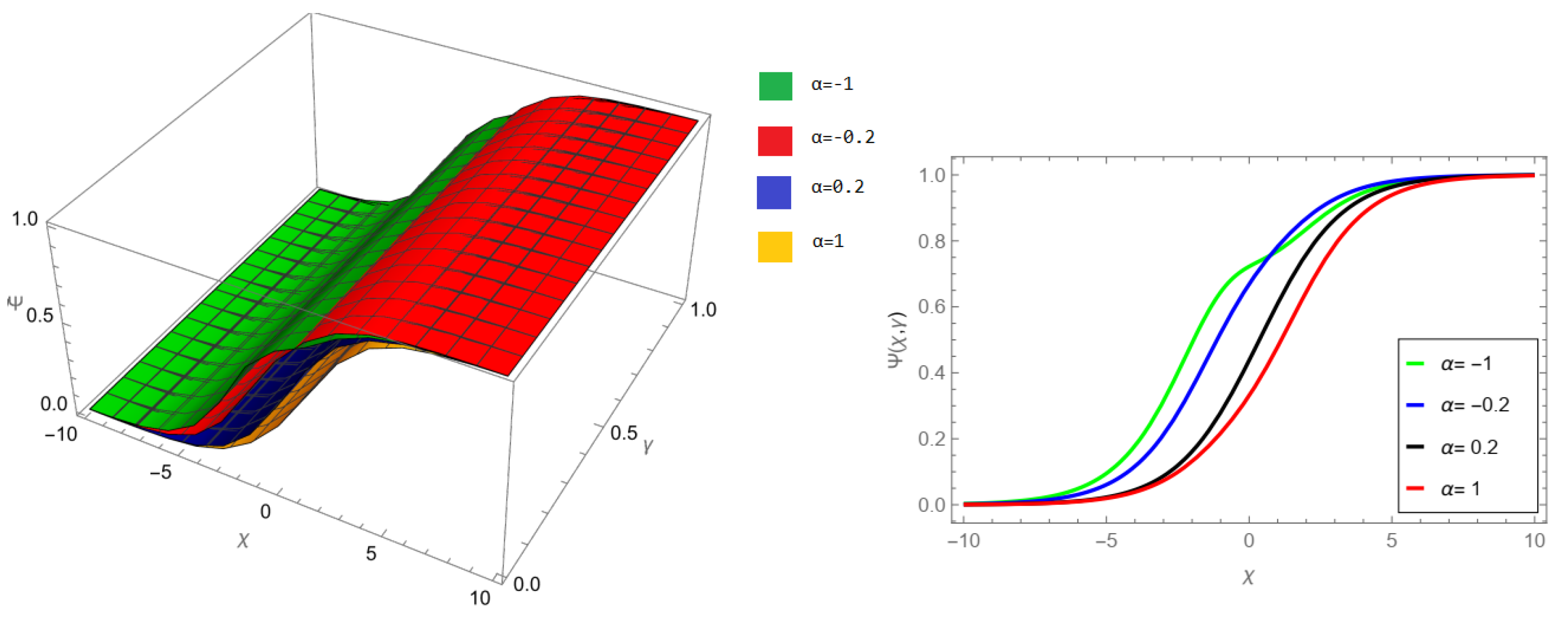
The tables and figures presented in this study provide a comprehensive comparison of the Laplace residual power series method (LRPSM) and the New Iteration Method (NIM) for solving example 1 with varying fractional orders and parameters.
Figure 1, LRPSM solution of example 1 for fractional order
and
. In
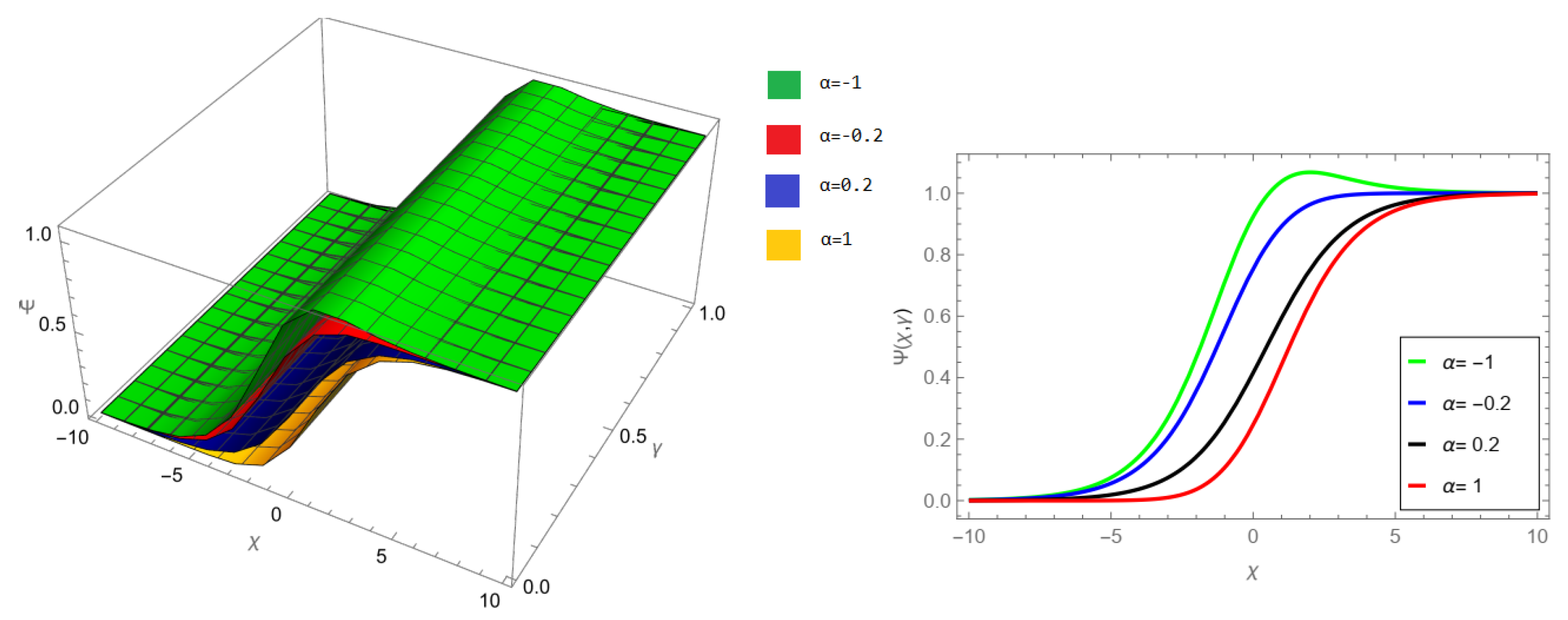
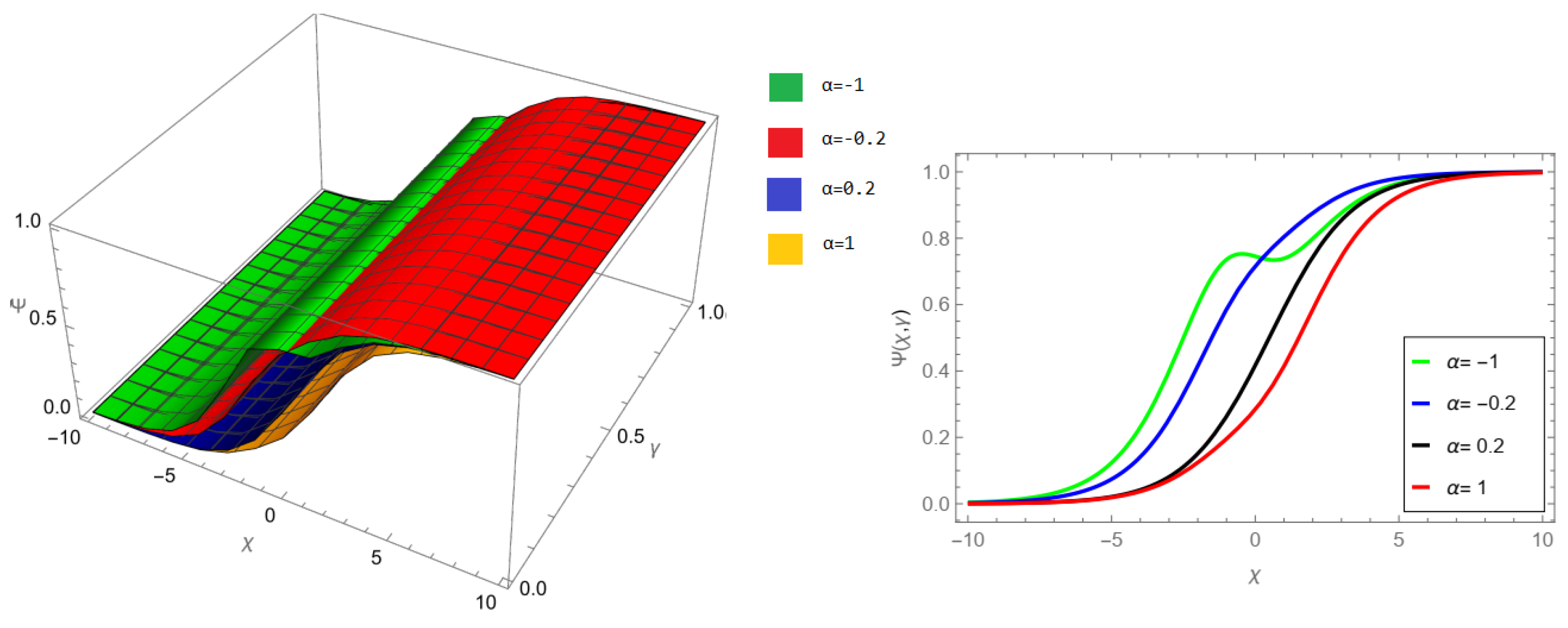
Figure 2, LRPSM solution of example 1 for fractional order
and
.
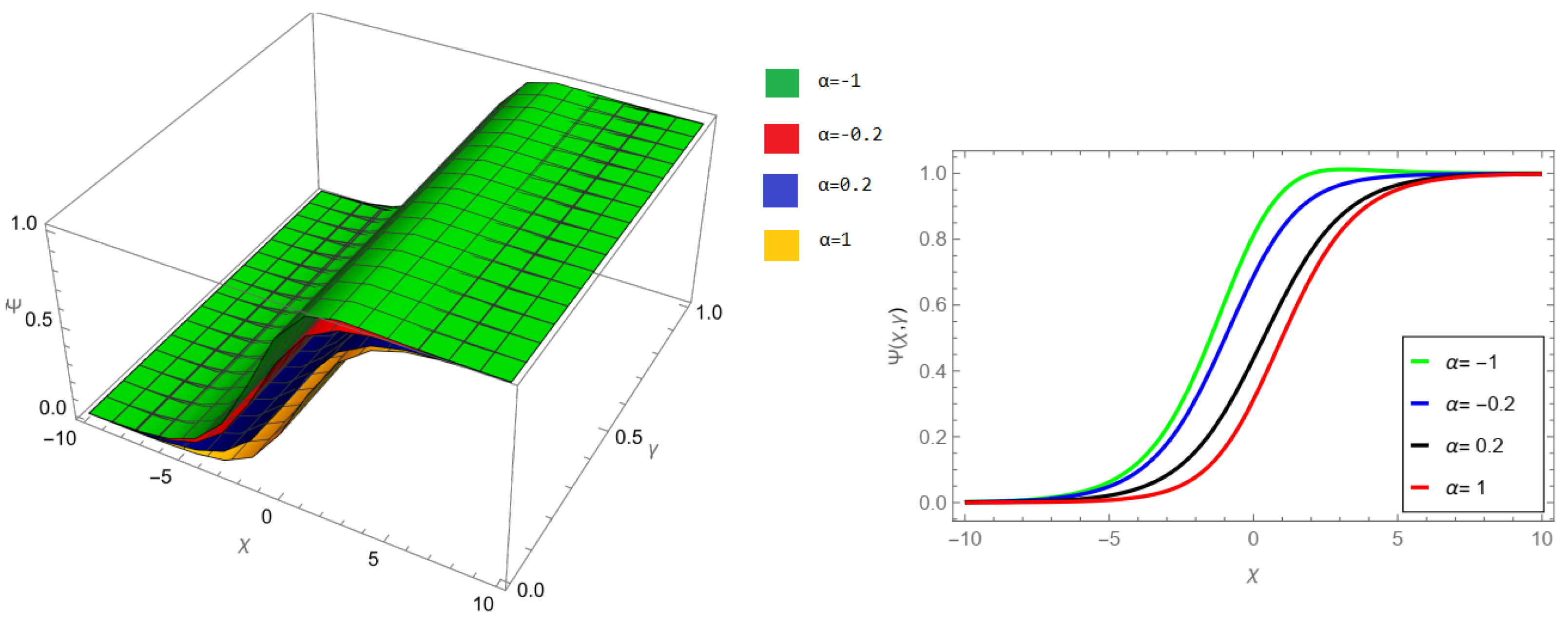
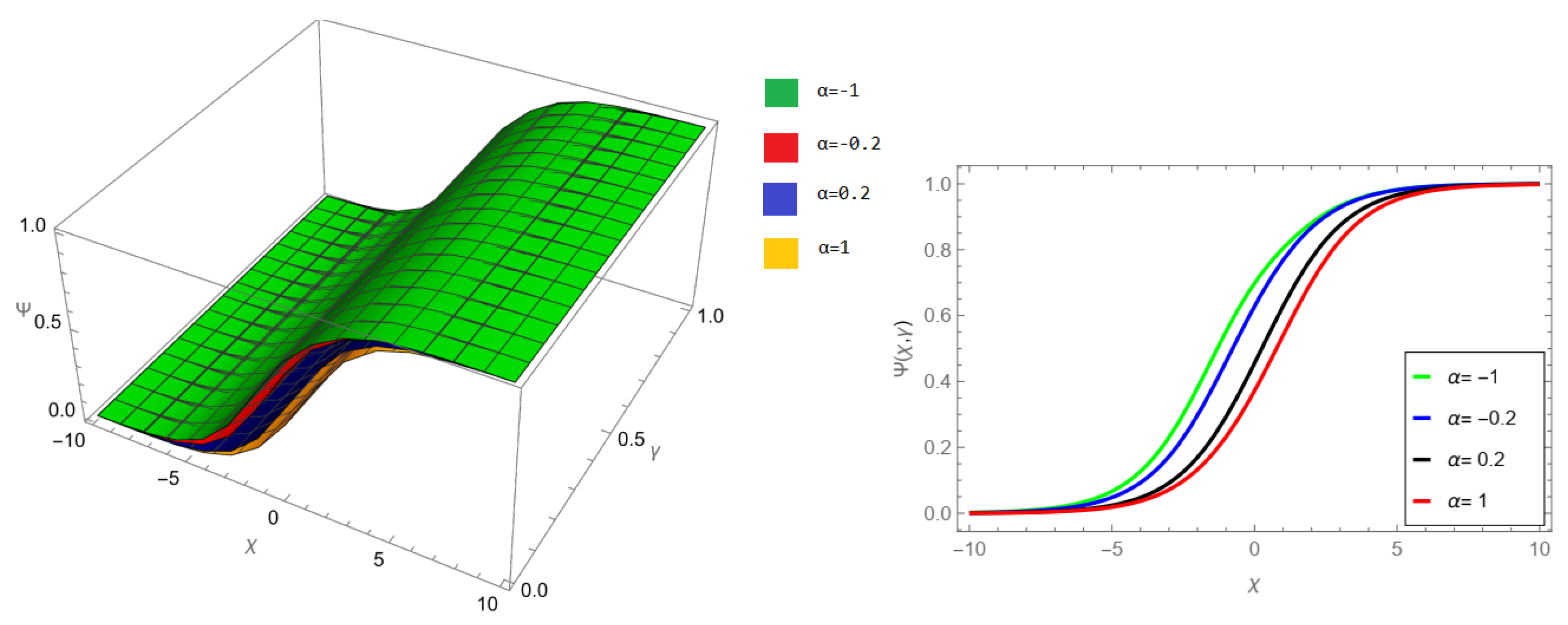
Figure 3, LRPSM solution of example 1 for fractional order
and
.
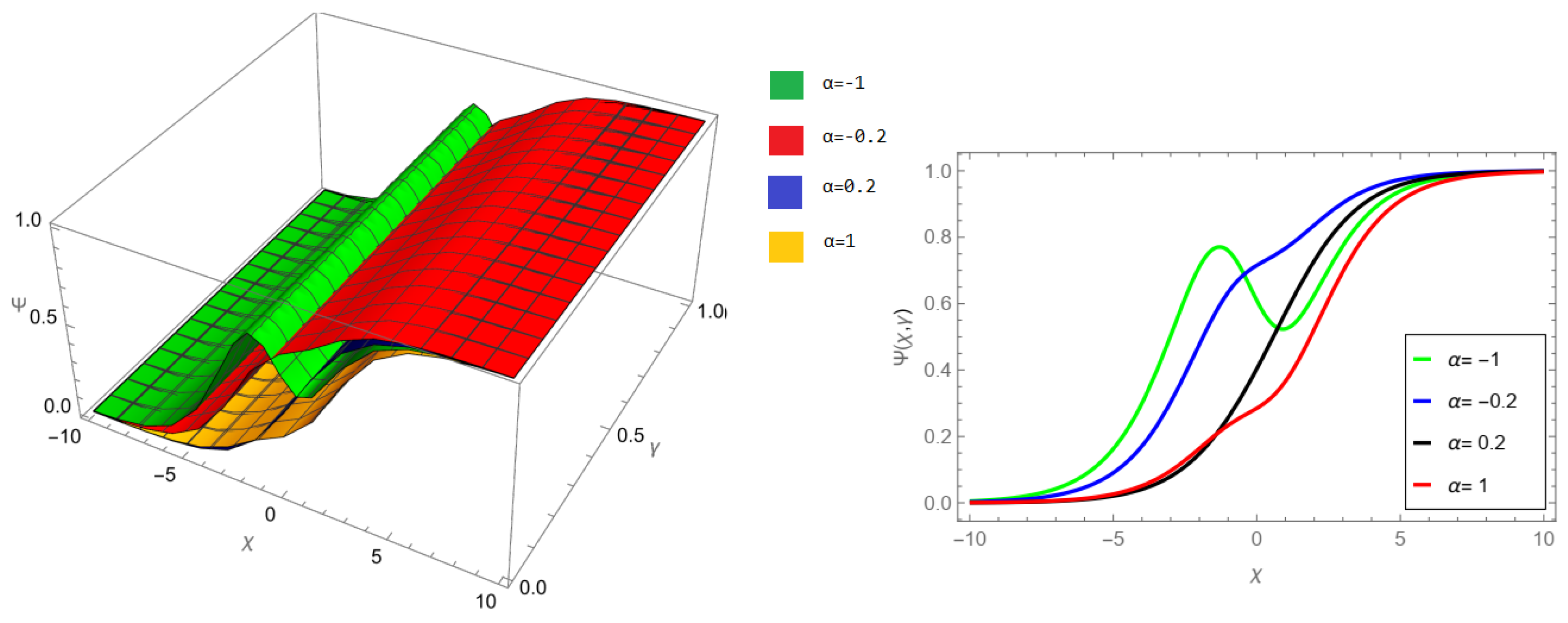
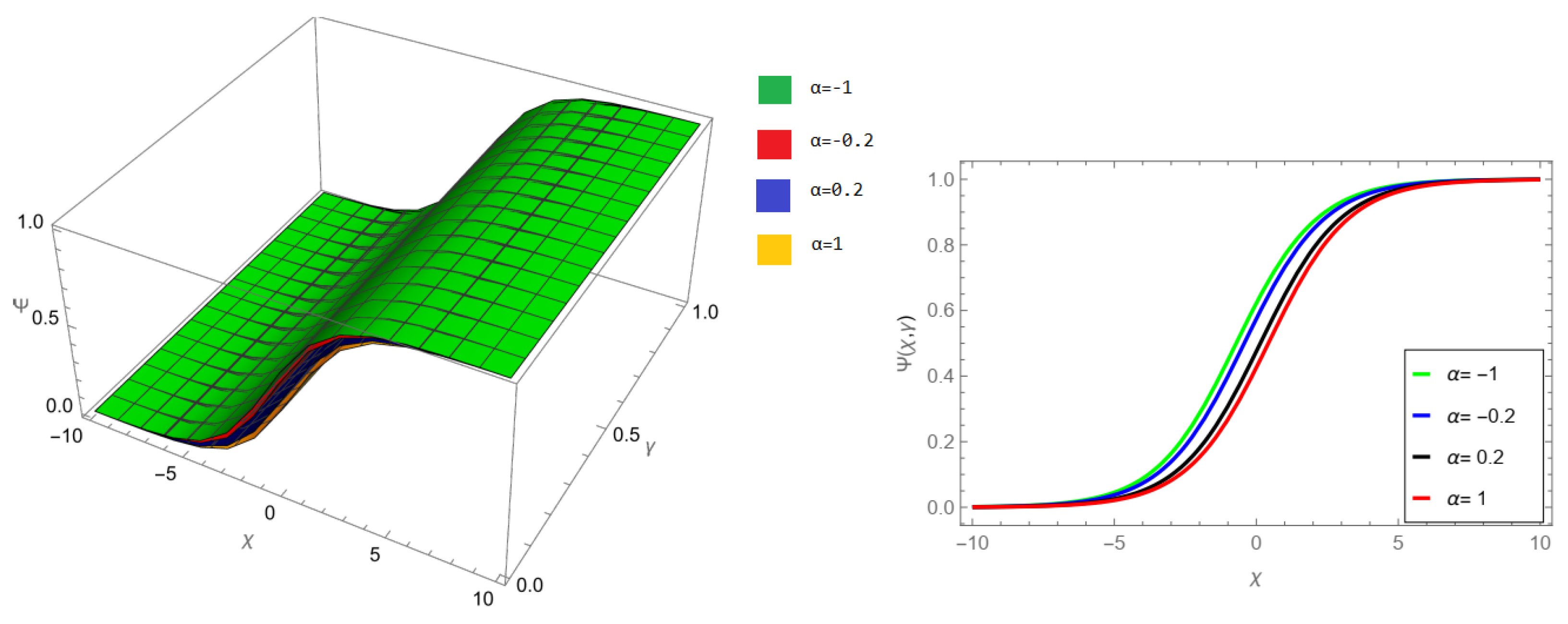
Figure 4, the LRPSM solution of example 1 for fractional order
and
.
Figure 5, LRPSM solution of example 1 for fractional order
and
.
Figure 6, LRPSM solution of example 1 for fractional order
and
. These figures provide visual insights into the behavior of LRPSM solutions under different fractional orders, offering a clear representation of their convergence characteristics.
Figure 7, NIM solution of example 1 for fractional order
and
.
Figure 8, NIM solution of example 1 for fractional order
and
.
Figure 9, NIM solution of example 1 for fractional order
and
.
Figure 10, NIM solution of example 1 for fractional order
and
.
Figure 11, NIM solution of example 1 for fractional order
and
.
Figure 12, NIM solution of example 1 for fractional order
and
. These visual representations offer insights into the convergence properties and behavior of NIM solutions under different fractional orders.
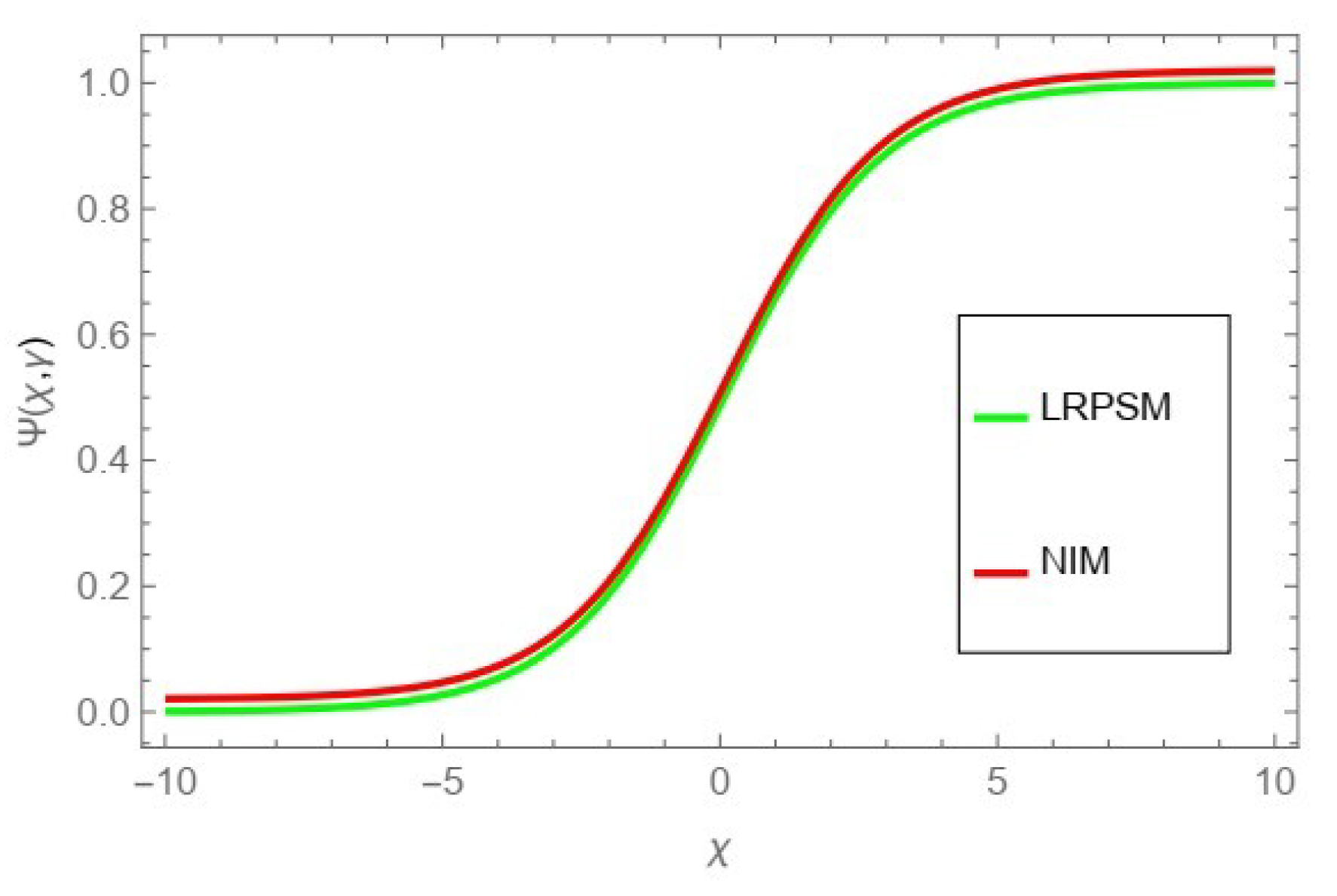
Figure 13, the comparison graph of NIM and LRPSM of fractional order
,
and
.
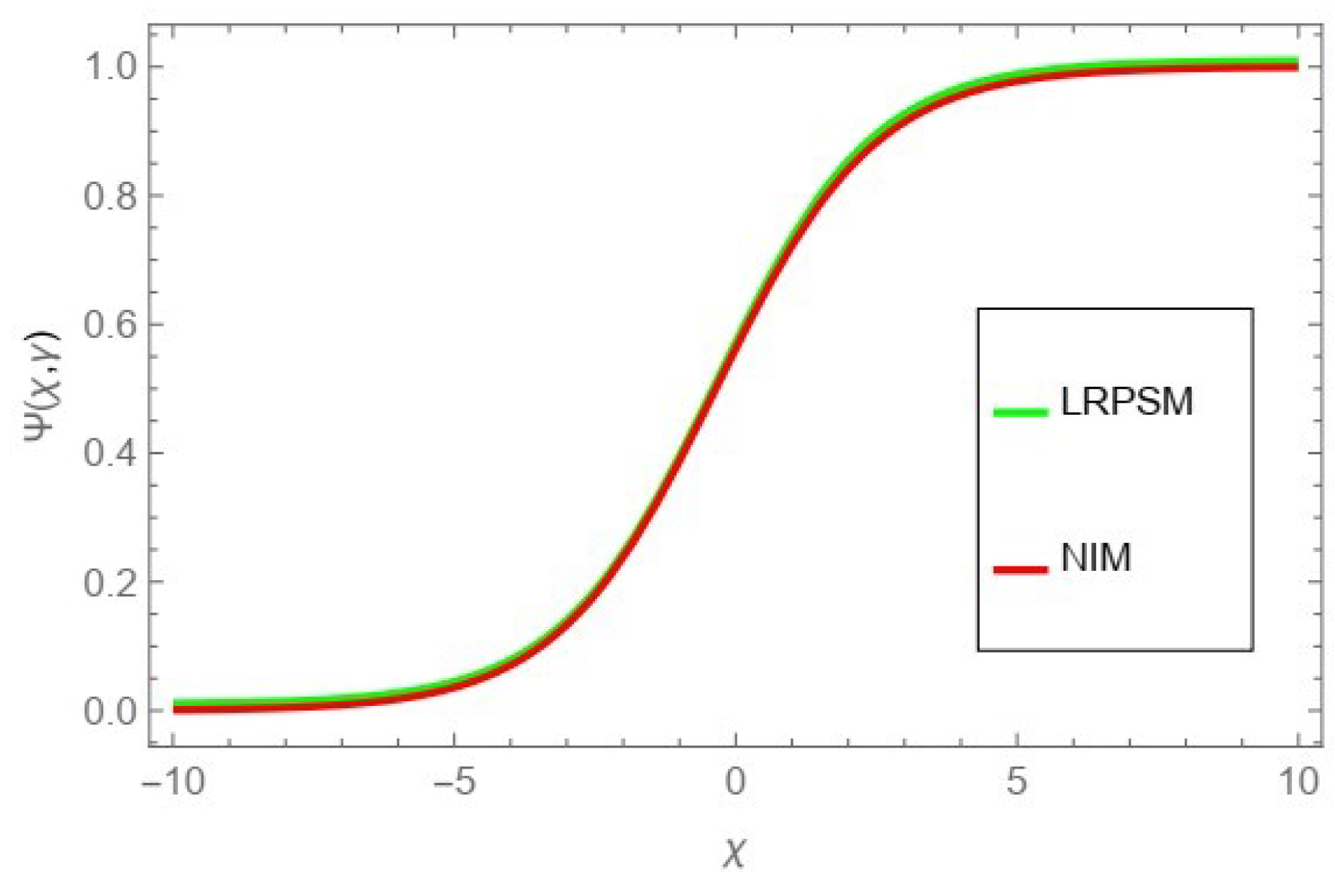
Figure 14, the comparison graph of NIM and LRPSM of fractional order
,
and
.
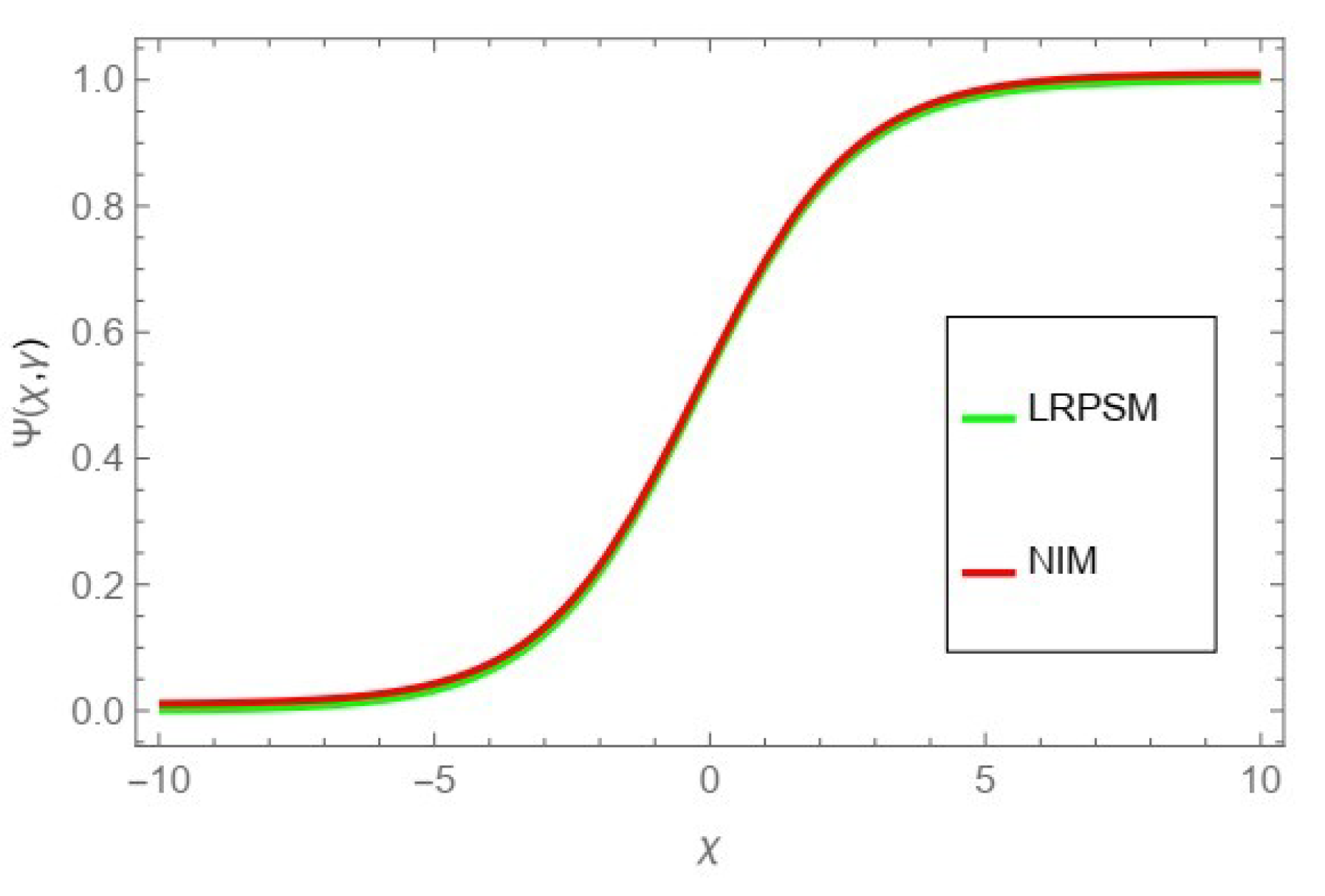
Figure 15, the comparison graph of NIM and LRPSM of fractional order
,
and
.
Table 1, different fractional-order comparison of LRPSM of example 1 for
.
Table 2, different fractional-order comparison of LRPSM of example 1 for
.
Table 3, different fractional-order comparison of LRPSM of example 1 for
.
Table 1,
Table 2 and
Table 3 demonstrate the influence of different fractional orders
p on the LRPSM solution for
,
, and
, respectively. These tables showcase how changing the fractional order affects the accuracy and convergence of the LRPSM solutions. ’
Table 4, different fractional-order comparison of NIM of example 1 for
.
Table 5, different fractional-order comparison of NIM of example 1 for
.
Table 6, different fractional-order comparison of NIM of example 1 for
.
Table 4,
Table 5 and
Table 6 present a similar comparative analysis but this time for the New Iteration Method (NIM) with varying fractional orders (
). These tables highlight how the choice of fractional order influences the accuracy and efficiency of NIM solutions.
Table 7, the comparison of absolute error for fractional order
of LRPSM and NIM.
Table 8, the comparison of absolute error for fractional order
of LRPSM and NIM. Collectively, these tables and figures provide a comprehensive assessment of the performance of LRPSM and NIM under various fractional orders and parameter settings, aiding researchers and practitioners in choosing the most suitable method for their specific problem and desired level of accuracy.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}