Abstract
In this paper, the vibration problem of a beam with a time fractional damping term is studied by the Hermite finite element method, and its fully discrete scheme is obtained. The stability and error estimation of the scheme are analyzed, and it was proved that it is unconditionally stable and has a convergence order of . The validity of the scheme is verified by numerical examples, the effects of fractional derivative order and damping coefficient on beam vibration are analyzed and the superiority of the fractional order model has been demonstrated by comparing with the traditional damping model.
1. Introduction
In this paper, we consider the following time fractional damping beam vibration problem:
where is displacement, is the bending stiffness, is density, A is the cross-sectional area, is damping coefficient, L is constant, and are smooth functions that are given known. There, represents the Caputo fractional derivative of order , which is defined as
where , is a positive real number. We take the fractional derivative as .
Fractional calculus is widely used in various related fields of science and engineering, such as mechanics and dynamical systems [1,2], anomalous diffusion [3,4], signal and image processing [5], etc. Fractional calculus provides a better description for analyzing the dynamics of complex systems. In engineering practice, fractional derivatives can be used to describe the viscoelastic properties of advanced materials or the dissipative forces in structural dynamics [6]. The vibration equation of a beam with a damping term can better describe the special properties of an object [7,8,9].
Galucio et al. [10] proposed a finite element method (FEM) based on implicit Newmark scheme for fractional order viscoelastic beams, and numerical examples are given. In [11], the motion equation of a fractional order Timoshenko beam is discretized by FEM and obtained the closed solution of the creep test. In [12], a general model of beams and rods with fractional derivatives is built. Roman et al. [13] proposed the amplitude equation of the fractional order viscoelastic beam by FEM and harmonic balance method. The stability of the steady-state solution is tested. Ehsan et al. [14] studied the vibration problem of a fractional order viscoelastic functionally gradient beam by finite difference method (FDM) and FEM. In [15], the fractional order viscoelastic Timoshenko nanobeams are analyzed by general differential orthogonality (GDQ) technique and FDM. The time response of the system under different boundary conditions is obtained. Oskouie et al. [16] used fractional calculus and Gurtin–Murdoch theory to study the nonlinear vibration of viscoelastic Euler–Bernoulli beams. In [17], FDM and the Galerkin method were combined to solve partial fractional differential equations. The periodic solution of a fractional order microbeam was obtained. The multi-scale method was applied to solve the vibration problem of a fractional order damped beam in [18,19]. Catania et al. [20] used FEM to analyze the vibration of fractional order heterogeneous beams. Xu et al. [21] analyzed the dynamic characteristics and steady-state response of a fractional order viscoelastic beam by wave method and discussed the effects of fractional order on wave propagation, transmission and reflection. Yang et al. [22] established a nonlinear fractional order model of viscoelastic microbeam by a new numerical algorithm, which simplifies the calculation. Cao et al. [23] solved the time fractional diffusion equation optimal control problem by FEM and analyzed the stability and truncation error of the discrete scheme. In [24,25,26], several numerical theories for solving time fractional fourth-order partial differential equations based on mixed finite element method (MFEM) and mixed finite volume element method (MFVM) were presented and analyzed. In [10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26], numerical examples are given and parameterization studies are carried out. The numerical results show that the fractional derivative order, viscoelastic coefficient and various damping coefficient have effects on the vibration of fractional viscoelastic beams under different boundary conditions.
In recent years, fractional order viscoelastic models have been widely used. Compared with classical viscoelastic models, they are more in line with practical situations and can more accurately describe the mechanical properties of viscoelastic materials. Zhang et al. [27] studied the damping characteristics of viscoelastic materials based on the fractional order Kelvin model. Di Paola et al. [28] used a fractional order constitutive model to describe the creep and stress relaxation phenomena of viscoelastic materials. In [29], Bagley et al. obtained the motion equation of a viscoelastic damping structure by using a five-parameter fractional order model. Liu et al. [30] studied the horizontal vibration problem of a single pile in viscoelastic soil layers based on fractional derivative theory. Koeller [31] extended the theory of genetic viscoelasticity to the fractional order and obtained the creep and relaxation functions of various fractional order calculus models by introducing the fractional order spring-pot model. The study of viscoelastic beam vibration is helpful to discover and solve the damage of structural resonance to infrastructure and reduce its negative impact, which is of great significance in the field of engineering mechanics and has a broad application prospect.
The Hermite finite element method ensures that the interpolation function has a continuous first derivative, can directly calculate the stress of the beam problem and has a higher order of convergence. The paper consists of six sections. Section 2 is finite element approximation. Section 3 is the stability analysis of the fully discrete scheme. We estimate the error of the fully discrete scheme by introducing projection in Section 4. In Section 5, four numerical examples are given to verify the validity of the scheme, explore the effect of fractional derivative order and damping coefficient on the vibration of the beam and compare the fractional order model with the classical damping model. Section 6 is the summary of this paper.
2. Finite Element Approximation
We consider and choose the Sobolev space to satisfy the boundary conditions. Multiply both sides of (1) by and integrate over 0 to t.
Using Green’s formula, we obtain the weak formulation for problem (1): find , satisfying
3. Stability of Fully Discrete Finite Element Schemes
For the discretization of time, let be a uniform partition of the interval , , . is the finite element space composed of piecewise cubic Hermite polynomial on . We discretize the second derivative term with the central difference quotient and use the approximation formula to discretize the time fractional derivative.
Let be the subdivision in the interval , . Based on the given finite element space , the corresponding finite element full-discrete scheme of (1) is find such that
Define
The approximation formula of the time fractional derivative is as follows, when ,
where , . Next, we will prove the stability of fully discrete finite element scheme.
Theorem 1.
The fully discrete finite element scheme (4) is unconditionally stable, and there is the stability estimate
Proof of Theorem 1.
Let in (4); using on the terms of left hand side, we obtain
Estimating the right hand side terms of (7) by Young inequality, we have
Substituting (8) and (9) into (7), we have
Expanding , we obtain
Multiplying both sides by and rearranging provides
Denote
We deduce that
Using Young inequality, we obtain
Thus,
Subtracting on both sides of (16), due to , we deduce
Hence,
(18) can be written as follows because of .
Note that and ; we deduce
The right hand terms of (19) can be estimated as
and
Combining (21) and (22), there holds
□
4. Error Estimation of Fully Discrete Finite Element Schemes
We will estimate the error between fully discrete solution and true solution; we introduce the elliptic projection such that
For projection (24), we have the following Lemma.
Lemma 1
([32]). denotes the degree of finite element space ; for any , we have
We present the error estimates for the scheme (4) in Theorem 2.
Theorem 2.
Let u and be the solutions of (1) and (2), respectively. , and then there exists a constant C independent of T and τ such that
Proof of Theorem 2.
Taking in Equation (2), tested by , we obtain
where
Subtracting (27) from (4) to obtain the error equation, we decompose the error as
where and , and we obtain
Taking in (28), using inequality, we have
By Young inequality, we deduce
Substituting (30)–(37) into (29), multiplying both sides by and rearranging, we obtain
Denote
(38) can be written as follows,
Next, we estimate the the right hand side of (40) one by one,
By Taylor’s theorem, we deduce
Then,
and
We expand as follows,
Substituting (41) and (45)–(47) into (40), and dropping nonnegative term , we deduce
Using Gronwall inequality, we obtain
Applying triangle inequality, we obtain the conclusion that
□
5. Numerical Experiment
In this part, we present four examples: Example 1 verifies Theorem 2, Example 2 shows the effect of fractional derivative variation on beam vibration amplitude and frequency, Example 3 shows the influence of damping coefficient variation on beam vibration amplitude and Example 4 demonstrates the advantages of the fractional order model by comparing with Example 3.
5.1. Example 1
Let variables and T in problem (1) be equal to 1. The true solution of the problem is selected as , so we consider the following initial boundary value problem:
We keep the space step at and change the time step to obtain the , errors and their orders of time convergence. As shown in Table 1, and order of time convergence reach to the one order for different . In Table 2, taking , we obtain the , order of space convergence. From the results in Table 2, we find that the order of space convergence reaches four, and the order reaches three. This is consistent with Theorem 2. Figure 1 is a comparison of the function images of the numerical solution and the true solution at .

Table 1.
Errors and time convergence orders of Example 1.
Table 2.
Errors and spatial convergence orders of Example 1.
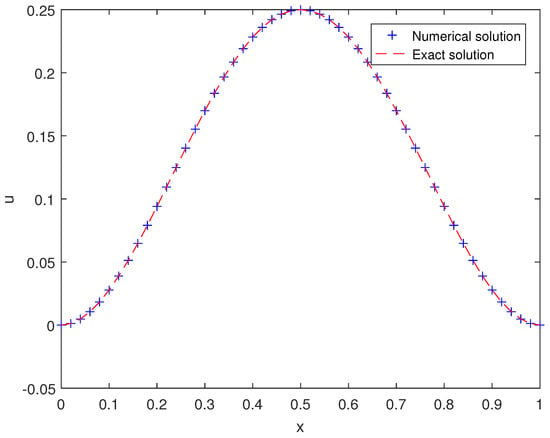
Figure 1.
The function images of the numerical solution and the true solution at t = 1 when = .
5.2. Example 2
In this example, we assume the variables , , , and . The fractional derivatives are 1.4, 1.5, 1.6, 1.7, 1.8. The initial value , and the right end term .
We take the midpoint of the beam and plot the image. When the fractional derivative is taken as 1.4, 1.5, 1.6, 1.7, 1.8, the displacement u changes with time t as shown in Figure 2. From the image, we can see that the amplitude of the beam is increasing with the increasing fractional derivative, and the peak value gradually shifts to the right. This indicates that, as the derivative order increases, the vibration frequency of the beam decreases and the vibration attenuation rate slows down.
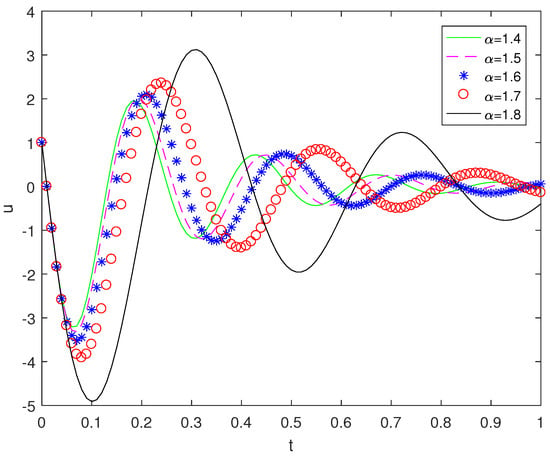
Figure 2.
The comparison image of beam vibration amplitude when takes , , , , .
5.3. Example 3
We take variables , , and . The fractional derivatives . The damping coefficients are 1, 5, 10. The initial value , and the right end term .
We take the midpoint of the beam and plot the image. When the damping coefficient taken as 1, 5, 10, the displacement u changes with time t as shown in Figure 3. From the image, it can be seen that the amplitude of the beam decreases as the damping coefficient increases, and the peak amplitude gradually shifts to the right. It is further shown that the attenuation rate of beam vibration decreases with the increase in damping.
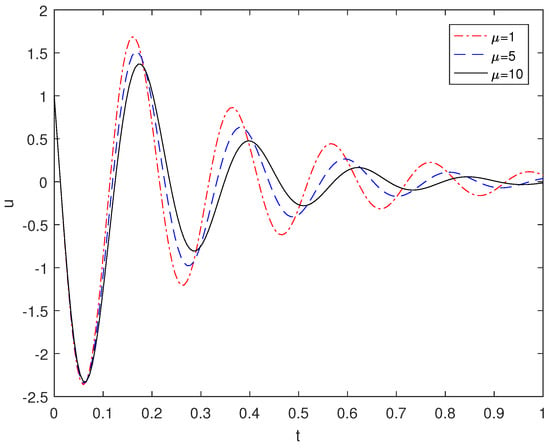
Figure 3.
The comparison image of beam vibration amplitude when takes 1, 5, 10.
5.4. Example 4
For the traditional damped beam model, we choose the same true solution, initial value and right end term as in Example 3. Take the midpoint of the beam to draw a graph and we obtain the following image of the displacement u changes with time t when the damping coefficient is 1, 5, 10. As can be seen from Figure 4, the amplitude of the beam decreases as the damping coefficient increases.
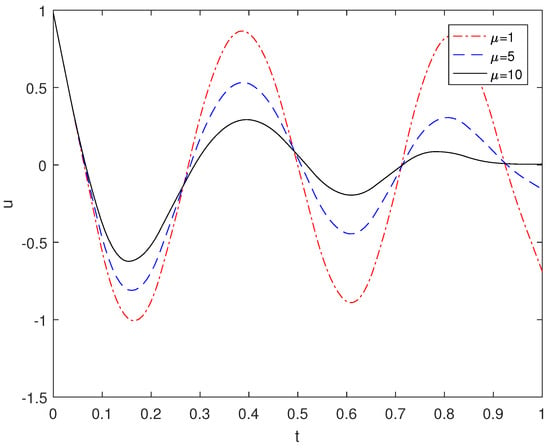
Figure 4.
The comparison image of beam vibration amplitude when takes 1, 5, 10.
Combining examples 2, 3, 4, we conclude that the vibration law of the beam in the fractional order damping model is basically the same as the wave characteristics of the classical damping beam, but the order of the fractional derivative has a significant impact on the vibration frequency of the beam. Specifically, the larger the order, the smaller the vibration frequency, and the vibration attenuation rate of the beam gradually decreases. It is shown that the traditional viscoelastic model cannot effectively reflect the long-term effects of damping beam deformation, and the fractional derivative can describe the dynamic characteristics of the structure more flexibly and precisely.
6. Conclusions
In this paper, the Hermite finite element method for solving the vibration problem of a beam with a time fractional damping term is presented. The space is approximated by the finite element method, and the time fractional derivative is approximated by L1 interpolation approximation. The stability and convergence of the fully discrete scheme are analyzed by introducing elliptic projection. The validity of the scheme is verified by numerical examples. It is found that the amplitude of the beam increases and the frequency and the vibration attenuation rate decrease with the increasing fractional derivative, and the amplitude of the beam and the vibration attenuation rate decrease as the damping coefficient increases. The fractional order model describes the vibration attenuation characteristics in the beam more precisely, which has important theoretical and engineering significance.
Author Contributions
Conceptualization, A.Z. and Z.Y.; Writing—original draft, X.S.; Writing—review and editing, X.S. and P.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (contract grant numbers 12171287, 11501335, 12172202) and the Natural Science Foundation of Shandong Province (contract grant number ZR2021MA063).
Data Availability Statement
Not applicable.
Acknowledgments
The authors thank the reviewers for their helpful and valuable suggestions and comments on this paper.
Conflicts of Interest
The authors declare no conflict of interest regarding the publication of this paper.
References
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear 2018, 64, 213–321. [Google Scholar] [CrossRef]
- Mehdinejadiani, B.; Jafari, H.; Baleanu, D. Derivation of a fractional Boussinesq equation for modelling unconfined groundwater. Eur. Phys. J. Spec. Top. 2013, 222, 1805–1812. [Google Scholar] [CrossRef]
- Elsaka, H.; Ahmed, E. A fractional order network model for ZIKA. BioRxiv 2016, 039917. [Google Scholar] [CrossRef]
- Sun, H.; Chen, W.; Chen, Y. Variable-order fractional differential operators in anomalous diffusion modeling. Phys. A 2009, 388, 4586–4592. [Google Scholar] [CrossRef]
- Nigmatullin, R.R.; Zhang, W. NAFASS in action: How to control randomness? Commun. Nonlinear 2013, 18, 547–558. [Google Scholar] [CrossRef]
- Cai, W.; Chen, W.; Xu, W. Fractional modeling of Pasternak-type viscoelastic foundation. Mech. Time-Depend. Mat. 2017, 21, 119–131. [Google Scholar] [CrossRef]
- Cajić, M.; Karličić, D.; Lazarević, M. Damped vibration of a nonlocal nanobeam resting on viscoelastic foundation: Fractional derivative model with two retardation times and fractional parameters. Meccanica 2017, 52, 363–382. [Google Scholar] [CrossRef]
- Amabili, M. Nonlinear damping in large-amplitude vibrations: Modelling and experiments. Nonlinear Dyn. 2018, 93, 5–18. [Google Scholar] [CrossRef]
- Amabili, M. Derivation of nonlinear damping from viscoelasticity in case of nonlinear vibrations. Nonlinear Dyn. 2019, 97, 1785–1797. [Google Scholar] [CrossRef]
- Galucio, A.C.; Deü, J.F.; Ohayon, R. Finite element formulation of viscoelastic sandwich beams using fractional derivative operators. Comput. Mech. 2004, 33, 282–291. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G.; Zingales, M. Finite-element formulation of a nonlocal hereditary fractional-order Timoshenko beam. J. Eng. Mech. 2017, 143, D4015001. [Google Scholar] [CrossRef]
- Dönmez Demir, D.; Bildik, N.; Sınır, B.G. Linear dynamical analysis of fractionally damped beams and rods. J. Eng. Math. 2014, 85, 131–147. [Google Scholar] [CrossRef]
- Lewandowski, R.; Wielentejczyk, P. Nonlinear vibration of viscoelastic beams described using fractional order derivatives. J. Sound Vib. 2017, 399, 228–243. [Google Scholar] [CrossRef]
- Loghman, E.; Kamali, A.; Bakhtiari-Nejad, F.; Abbaszadeh, M. Nonlinear free and forced vibrations of fractional modeled viscoelastic FGM micro-beam. Appl. Math. Model. 2021, 92, 297–314. [Google Scholar] [CrossRef]
- Ansari, R.; Oskouie, M.F.; Sadeghi, F.; Bazdid-Vahdati, M. Free vibration of fractional viscoelastic Timoshenko nanobeams using the nonlocal elasticity theory. Phys. E Low Dimens. Syst. Nanostruct. 2015, 74, 318–327. [Google Scholar] [CrossRef]
- Oskouie, M.F.; Ansari, R.; Sadeghi, F. Nonlinear vibration analysis of fractional viscoelastic Euler–Bernoulli nanobeams based on the surface stress theory. AMSS 2017, 30, 416–424. [Google Scholar] [CrossRef]
- Loghman, E.; Bakhtiari-Nejad, F.; Kamali, A.; Abbaszadeh, M.; Amabili, M. Nonlinear vibration of fractional viscoelastic micro-beams. Int. J. Nonlinear Mech. 2021, 137, 103811. [Google Scholar] [CrossRef]
- Bakhtiari-Nejad, F.; Loghman, E.; Pirasteh, M. Nonlinear vibration analysis of a fractional viscoelastic Euler-Bernoulli microbeam. ASME Int. Mech. Eng. Congr. Expo. 2018, 52163, V011T01A017. [Google Scholar]
- Rossikhin, Y.A.; Shitikova, M.V. Application of fractional calculus for analysis of nonlinear damped vibrations of suspension bridges. J. Eng. Mech. 1998, 124, 1029–1036. [Google Scholar] [CrossRef]
- Catania, G.; Fasana, A.; Sorrentino, S. Finite element analysis of vibrating non-homogeneous beams with fractional derivative viscoelastic models. IFAC Proc. Vol. 2006, 39, 280–285. [Google Scholar] [CrossRef]
- Xu, J.; Chen, Y.; Tai, Y.; Xu, X.; Shi, G.; Chen, N. Vibration analysis of complex fractional viscoelastic beam structures by the wave method. Int. J. Mech. Sci. 2020, 167, 105204. [Google Scholar] [CrossRef]
- Yang, A.; Zhang, Q.; Qu, J.; Cui, Y.; Chen, Y. Solving and Numerical Simulations of Fractional-Order Governing Equation for Micro-Beams. Fractal Fract. 2023, 7, 204. [Google Scholar] [CrossRef]
- Cao, J.; Wang, Z.; Wang, Z. A Uniform Accuracy High-Order Finite Difference and FEM for Optimal Problem Governed by Time-Fractional Diffusion Equation. Fractal Fract. 2022, 6, 475. [Google Scholar] [CrossRef]
- Wang, T.; Jiang, Z.; Zhu, A.; Zhe, Y. A Mixed Finite Volume Element Method for Time-Fractional Damping Beam Vibration Problem. Fractal Fract. 2022, 6, 523. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, Z.; Li, H.; He, S. A mixed finite element method for a time-fractional fourth-order partial differential equation. Appl. Math. Comput. 2014, 243, 703–717. [Google Scholar] [CrossRef]
- Liu, Y.; Du, Y.; Li, H.; He, S.; Gao, W. Finite difference/finite element method for a nonlinear time-fractional fourth-order reaction–diffusion problem. Comput. Math. Appl. 2015, 70, 573–591. [Google Scholar] [CrossRef]
- Eldred, L.B.; Baker, W.P.; Palazotto, A.N. Kelvin-Voigt versus fractional derivative model as constitutive relations for viscoelastic materials. AIAA J. 1995, 33, 547–550. [Google Scholar] [CrossRef]
- Di Paola, M.; Pirrotta, A.; Valenza, A. Visco-elastic behavior through fractional calculus: An easier method for best fitting experimental results. Mech. Mater. 2011, 43, 799–806. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. Fractional calculus-a different approach to the analysis of viscoelastically damped structures. AIAA J. 1983, 21, 741–748. [Google Scholar] [CrossRef]
- Liu, L.; Yan, Q. Lateral vibration of single pile in viscoelastic soil described by fractional derivative model. Eng. Mech. 2011, 28, 139–145. [Google Scholar]
- Koeller, R. Applications of fractional calculus to the theory of viscoelasticity. J. Appl. Mech. 1984, 51, 299–307. [Google Scholar] [CrossRef]
- Ciarlet, P. The Finite Element Method for Elliptic Problems; North-Holland Publishing Company: Amsterdam, The Netherlands, 1978. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).