1. Introduction
This manuscript mainly investigates the sufficient conditions of the approximate controllability of some fractional control systems as below:
and
where
means the Caputo derivative with order
X and
U are Banach spaces. Linear operator
is unbounded with dense domain
. The delay term
is explained in Equation (
5). The control
u takes values in
. For any
, the non-local term
satisfies some given conditions.
is a parameter. Let
is a bounded linear operator.
f is a non-linearity that will be specified later.
Fractional differential systems and evolution systems have been studied extensively owing to its widespread backgrounds of some scientific and engineering realms, such as signal processing, finance, anomalous diffusion phenomena, heat conduction, etc. We refer readers to [
1,
2,
3,
4] for further detailed information. On the other side, controllability has gained a lot of importance and interest, and it plays a significant role in the description of various dynamical problems [
5,
6,
7,
8]. It is known to all that the fractional evolution system is closely related to time. In this regard, it has something in common with the controllability problem. Therefore, the controllability of some kinds of fractional evolution systems has become an important research hotspot. For example, exact controllability and approximate controllability are two mainstream research directions and they have important differences from the viewpoint of mathematics. Exact controllability can steer the control system to any given final time point. The control operator is usually assumed to be reversible. Then, the controllability problem is transformed into a fixed point problem [
9,
10,
11,
12,
13]. Furthermore, an induced inverse of the control operator is not necessarily true in infinite-dimensional space. In consideration of these strong assumptions, more and more scholars begin to study the approximate controllability in various abstract spaces, which means that it can steer the control system to an any small neighborhood of final time point [
14,
15,
16,
17,
18,
19,
20]. In addition, controllability of fractional evolution systems also has important applications in the research areas of logical control networks or Boolean networks.
For instance, S. Ji [
16] and F. Ge et al. [
17] studied the approximate controllability of fractional semi-linear non-local evolution systems and fractional differential systems with impulsive conditions via approximating method under the assumption that
A generated a
-semigroup, respectively. Moreover, the approximate controllability of some other fractional systems, such as stochastic equations, neutral equations, etc., have also been deeply investigated (one can see [
18,
19,
20] for more details). However, approximate controllability of the linear systems correspondence to the considered systems is necessary in this method. Therefore, some other approaches, such as the iterative method, are used to solve the approximate controllability problems for some evolution systems. For example, H. Zhou [
21] obtained a sufficient condition of the approximate controllability for certain first-order evolution equations by utilizing iterative approach and the theory of strongly continuous semigroup. Authors in [
22] dealt with the approximate controllability of some evolution systems with fractional order without delay by using iterative method. The properties of
-semigroup are also included. By applying the same method, [
23] also derived some appropriate controllability conclusions for some fractional differential equations with no delay effects.
It is noted that the results of approximate controllability discussed above are based on the
-semigroup together with some associated characteristic solution operators [
24]. However, in many cases, infinitesimal generator
A may not be able to generate a
-semigroup, but it can generate a resolvent operator instead [
25]. On the other side, a resolvent operator can degenerate into a
-semigroup when the integral kernel is equal to 1, that is, a resolvent operator covers a
-semigroup as a special case. Of course, this can also be explained by the subordinate principle [
26].
In comparision with results in [
27] considering the influence of delay, we shall study the approximate controllability for some fractional control systems on the supposition that
A is an infinitesimal generator of a differentiable resolvent operator rather than a
-semigroup; we shall consider a control problem with variable delay, not fixed delay by contrast; the function
is supposed to be integrable rather than continuous. Under these generalized conditions, the difficulty mainly lies in how to overcome the obstacles caused by the variable delay and how to make use of the differentiability of resolvent operators. We solve this problem by means of a new special complete space we introduced and the theory of differentiable resolvent operator developed in [
25].
Motivated by the aforementioned discussions, we shall establish a set of new approximate controllability results for systems (1) and (2) by using iterative method. As far as we know, the approximate controllability for the fractional evolution equations with finite variable delay and with non-local conditions and a parameter under the hypothesis that A generate a differentiable resolvent operator is still an untreated topic in the existing literature. Therefore, it is necessary to make further investigations to fill the gap in this regard.
Summarily, different from the above discussed papers, some highlights of the manuscript are presented as follows. (i) The approximate controllability of considered systems is studied on the supposition that the resolvent operator is differentiable, rather than utilizing the theory of
-semigroup together with the properties of associated characteristic solution operators; (ii) The delay-induced-difficulty is overcome by introducing a special complete integrable space since we generalize the delay term from continuity to integrability compared with some other papers; (iii) The system (2) discussed in this manuscript is provided with some more generalized nonlocal conditions compared with many related papers [
5,
9,
11,
16,
17]
.
This manuscript is arranged as below. In the next part, we include some necessary preparations for the main controllability results. In
Section 3, some existence results of the mild solution of the considered systems are obtained. In
Section 4, we investigate the approximate controllability for the fractional delay control systems, and the case with non-local conditions and a parameter is discussed in
Section 5. An instance is proposed in
Section 6 to illustrate our abstract conclusions.
2. Preparations
Let
X be a Banach space with norm
,
. The linear operator
is closed and unbounded, in which
means the domain of
A equipped with graph norm
.
stands for the space with all the continuous functions mapping
I into
X equipped with the sup-norm
,
stands for the space of all Bochner integrable functions mapping
I into
X equipped with the norm
, and
denotes the space of all the
-Hölder continuous functions mapping
I into
X provided with the norm
, where
In the next discussion, the following equation
is assumed to possess an resolvent operator
on
X.
Definition 1 ([
28]).
The fractional integral of order with the lower limit zero is written aswhere Γ
denotes the Gamma function. Definition 2 ([
28]).
The fractional derivative of the function in the Caputo sense can be defined bywhere represents the integer part of the positive constant β. Definition 3 ([
25]).
Suppose a set of operators to be bounded and linear on space X. If it fulfills hypotheses as below:(i) is strongly continuous on and ;
(ii) for each it satisfies ;
(iii) The following equality can be established then we define it as a resolvent operator of Equation (
3).
Definition 4 ([
25]).
A resolvent operator of Equation (3) is known as differentiable, if it satisfies , . In addition, for , there exists a function satisfying Consider the following equality
where
Definition 5 ([
25]).
A function is said to be a mild solution of equality Equation (4) if it satisfies and The following result provides another equivalent form of mild solution for Equation (
4).
Lemma 1 ([
25]).
If the resolvent operator of Equation (4) is differentiable, then for , the following functionis called a mild solution of Equation (4). To end this section, the set
is proposed which stands for a space of all the integrable functions mapping
into
X equipped with norm
. Obviously, it is complete. Considering Equation (
1), for any
,
, let
for any
, where
denotes the function mentioned in Equation (
1). Obviously, we can check that
On the basis of Equation (
5), we give the following result.
Lemma 2. Assume that for . Then, for any , one can derive that for .
Proof. In view of (5), we can easily derive
which indicates that
for any
.
3. Existence Results
This part establishes the existence results of mild solution of Equation (
1). Now, assume resolvent operator
to be differentiable. Let
be the function mentioned in Definition 4.
From Definition 1 and Definition 5, we can obtain
Definition 6. For any a function is called a mild solution of Equation (1) on I, provided thatwhere , and is defined by Equation (5). In the next content, we will need the following assumptions.
Hypothesis 1 (H1). f is a continuous function from into and . There is a real number and a function satisfying for any and .
Hypothesis 2 (H2). For any there exists a constant satisfying For simplicity, we denote From Lemma 1 and Definition 6, we can derive the mild solution of Equation (1) on I of another expression as follows. Definition 7. For any a function is called a mild solution of Equation (1) on I, provided that Remark 1. It follows from Definition 1 that the classical solution of system Equation (1) is a convolution equation. Hence, it is natural to apply Laplace transform on it to express an appropriate formula for the mild solution representation of the considered system. For this purpose, we suppose that resolvent operator is exponentially bounded. By utilizing the theory of the Laplace transform and inverse Laplace transform, the mild solution of Equation (1) could be defined bywhere and is defined by Equation (5). Lemma 3. (i) If hypothesis (H1) holds, then for arbitrarily given , we have and(ii) For any we have and Proof. (i) For arbitrarily given
,
,
satisfying
, by using Hölder inequality, one can derive
which indicates that
and
.
(ii) In the light of the proof for (i), it can be obtained similarly. □
Lemma 4. (i) If Hypotheses (H1) and (H2) hold, then for ,and(ii) For any ,and Proof. (i) In view of Lemma 2, we can obtain
In addition,
(ii) Obviously, we can obtain that
□
Theorem 1. If the Hypotheses (H1) and (H2) hold, then for any given control fractional evolution system Equation (1) has an unique mild solution on I, provided that Proof. In view of Definition 7, for any
, define an operator
as below
Evidently, we only need to consider the fixed point of
.
Step 1. maps into .
For every
, we have
where
By Lemma 3, we can obtain
and
In addition, since
we thus can derive from Definition 4, Lemma 3 and Lemma 4 that
It is not difficult to have
which together with Lemma 3 and Lemma 4 implies
Hence, , which indicates that .
Step 2. is contractive on
In fact, Lemma 2 indicates that
which shows that
Hence, is contractive on due to the Hypothesis (1). By utilizing the Banach’s fixed point theorem, we find that has a unique fixed point on □
5. Non-Local Conditions
The practical usefulness and significance of non-local conditions in the field of technology and mechanical engineering have been demonstrated [
5,
9,
11]. It has been proved that the non-local initial condition can provide more accurate descriptions than the classical initial conditions. Therefore, we concern the following system involving non-local conditions and a parameter as below:
Firstly, we present the following hypothesis about the non-local conditions.
Hypothesis 5 (H5). , for any ;
(i) For , there has a number satisfying (ii) The non-local term is continuous in for all , and there has a constant satisfying
Next, for and , let for . Obviously, we can check that On the basis of Equation (13) and (H5), we have the following result similar to Lemma 2. Lemma 6. Assume that for . Then, for any , one can derive that for , and satisfies Proof. In accordance with Equation (
13) and condition (H5), we can draw the inequalities as below:
and
which imply that
for any
□
Definition 10. (i) For any a function is called a mild solution of Equation (2) on I, provided that (ii) System (2) is said to be approximately controllable on I, provided that for any and any final value , there exists a control term satisfying where
is a mild solution of Equation (
2) corresponding to
.
Theorem 3. In accordance with the proof steps of Theorem 1, one finds that if the Hypotheses (H1)–(H2) hold, then for any given control system (2) has an unique mild solution on I, provided that
Under the condition Equation (
14), we further suppose the following hypothesis:
Hypothesis 6 (H6). The following inequality holds In addition, to obtain the non-local results, we still need a lemma as below.
Lemma 7. If the hypotheses (H1)–(H2) hold, then for any mild solutions of system (2), the following result holds for any .
By means of iterative method utilized in Theorem 2 similarly, we now can obtain the main controllability result of the non-local case:
Theorem 4. If the Hypotheses (H1)–(H3) and (H5) hold, then system (2) is approximately controllable on
Remark 2. Usually, the non-local condition can be given as followswhere are some real numbers; When and at time , it is evident that which is exactly the case in [5,9,11,16,17]. 6. Applications
Evolutionary fractional behavior has widespread backgrounds of some practical fields of science and engineering. For example, in an electrical circuit, the voltage produced by some non-linear device can be expressed by the non-linear term
f in the evolution systems; some related resistances can be represented by
A; and linear operator
B can denote some inductances. On the other hand, non-local conditions are more extensive in practical applications because they usually includes many other conditions, such as conditions of initial value, multipoint average, and periodic, etc. In this part, we consider the following fractional non-local delayed evolution systems
where
,
, and
.
.
Let
for
where
Evidently,
A is an infinitesimal generator of a semigroup
satisfying
In view of subordinate principle (Chapter 3, [
26]), we know that
A is also an infinitesimal generator of a continuous differentiable bounded linear operators family
satisfying
, and
where
and
where
is a contour which encircles the origin once counterclockwise.
For each
one has
Then, an operator
B can be defined by
where
for every
This ensures that
B is a bounded linear operator. In addition, the operator
in Equation (
9) is exactly the case of the operator in [
29] when
and
Furthermore, denote by
,
Hence, Equation (
15) can be regarded as
In addition, it can be checked that
satisfy all assumptions in Theorem 4. Therefore, system (15) is approximately controllable on
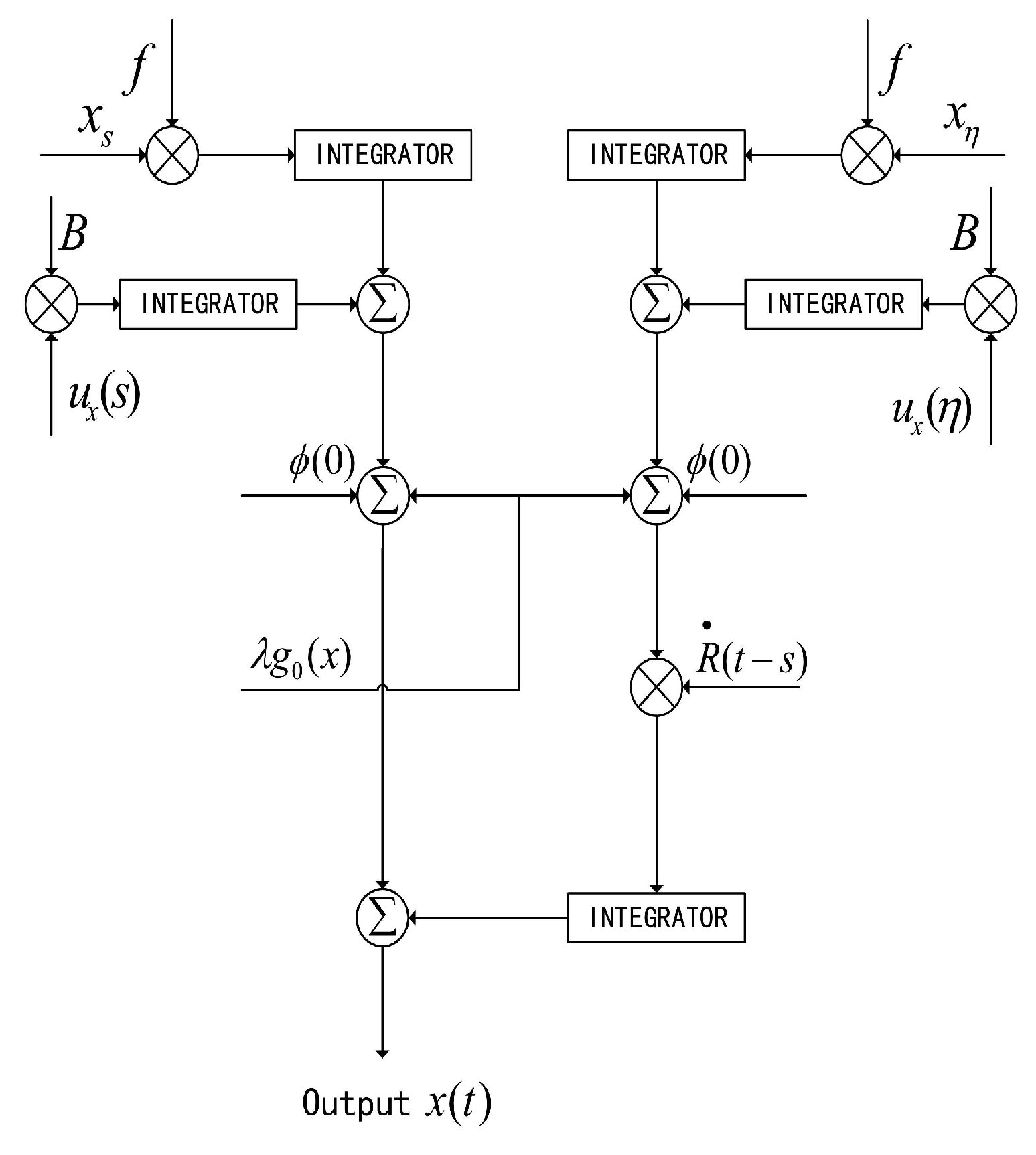
In addition, it is well known to all that the prospect of digital signal processing (DSP) is widespread and developmental, and digital filters play a significant role in it. Therefore, in this part, we also present the filter pattern of the system we studied which is given in
Figure 1.
For any time t, the resultant values of samples and are produced and transferred to the integrators and , where the signals are integrated over time 0 to t. The signals of resultant values of B and are integrated in integrators and . Integrators and are entered into summer network-1; Integrators and are entered into summer network-2. Inputs and at time are added up in the summer network-3 and summer network-4. The integral for the product of and the signals in summer network-4 over time 0 to t is performed in integrators . At last, move the above outputs and integrators to summer network-5, and, thus, the final outputs is derived, which is bounded and approximately controllable.


{kind=link}