
On the Finite-Time Boundedness and Finite-Time Stability of Caputo-Type Fractional Order Neural Networks with Time Delay and Uncertain Terms


 ,
,  and
and
Abstract
:1. Introduction
- (1)
- The finite-time boundedness and finite-time stability concepts are adopted to a continuous model of neural networks of fractional order with time delays and uncertain parameters;
- (2)
- New finite-time boundedness and finite-time stability results are established;
- (3)
- A new property of Caputo fractional derivatives, properties of Mittag–Leffler functions and Laplace transforms are applied;
- (4)
- By using the Lyapunov functional approach and inequality techniques the obtained results are represented in terms of LMIs;
- (5)
- Two examples are explored to expose the efficiency of the proposed finite-time stability and finite-time boundedness results.
2. Problem Formulation and Preliminary Results
3. Finite-Time Stability and Boundedness Results
3.1. Robust Finite-Time Stability
3.2. Finite-Time Boundedness
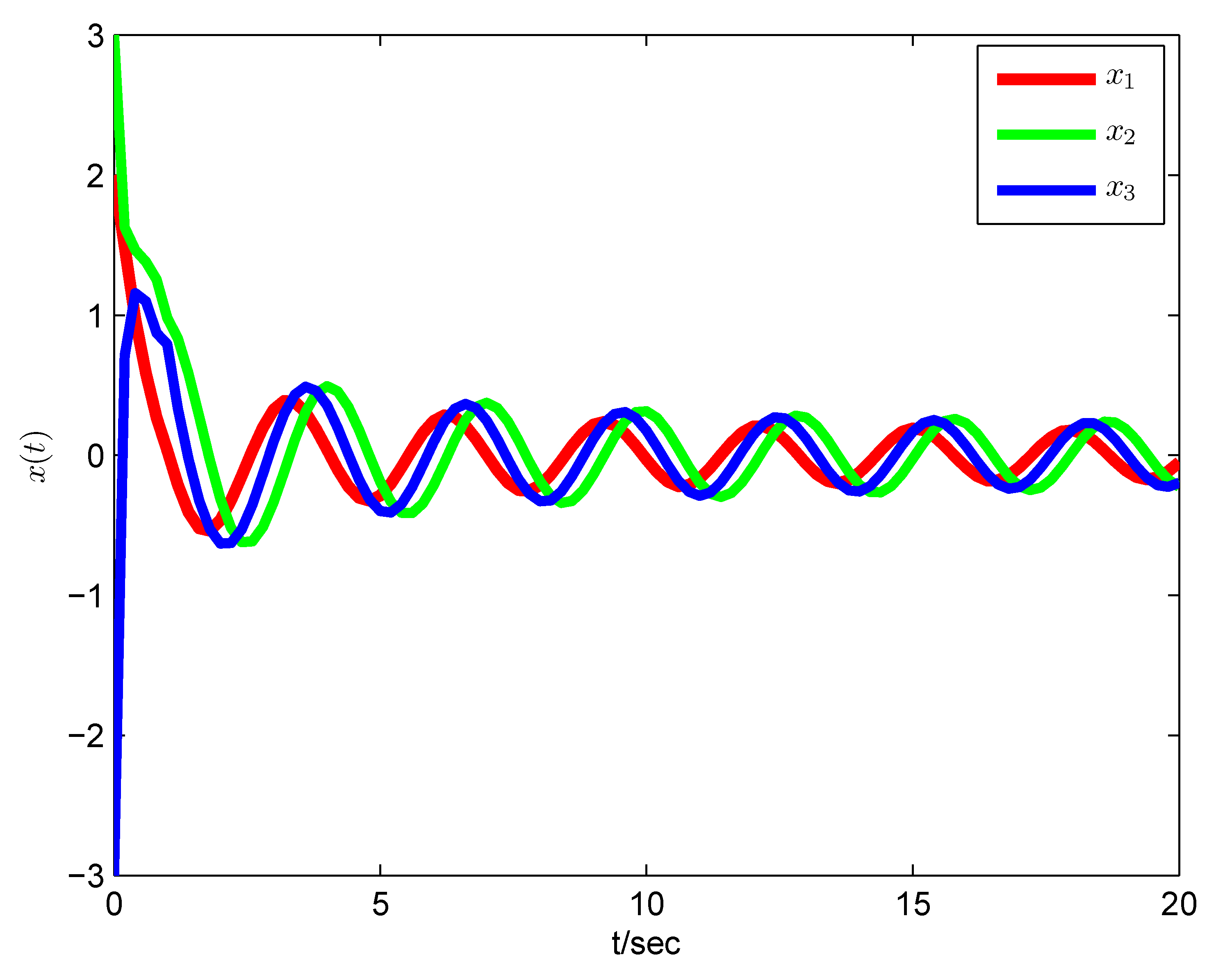
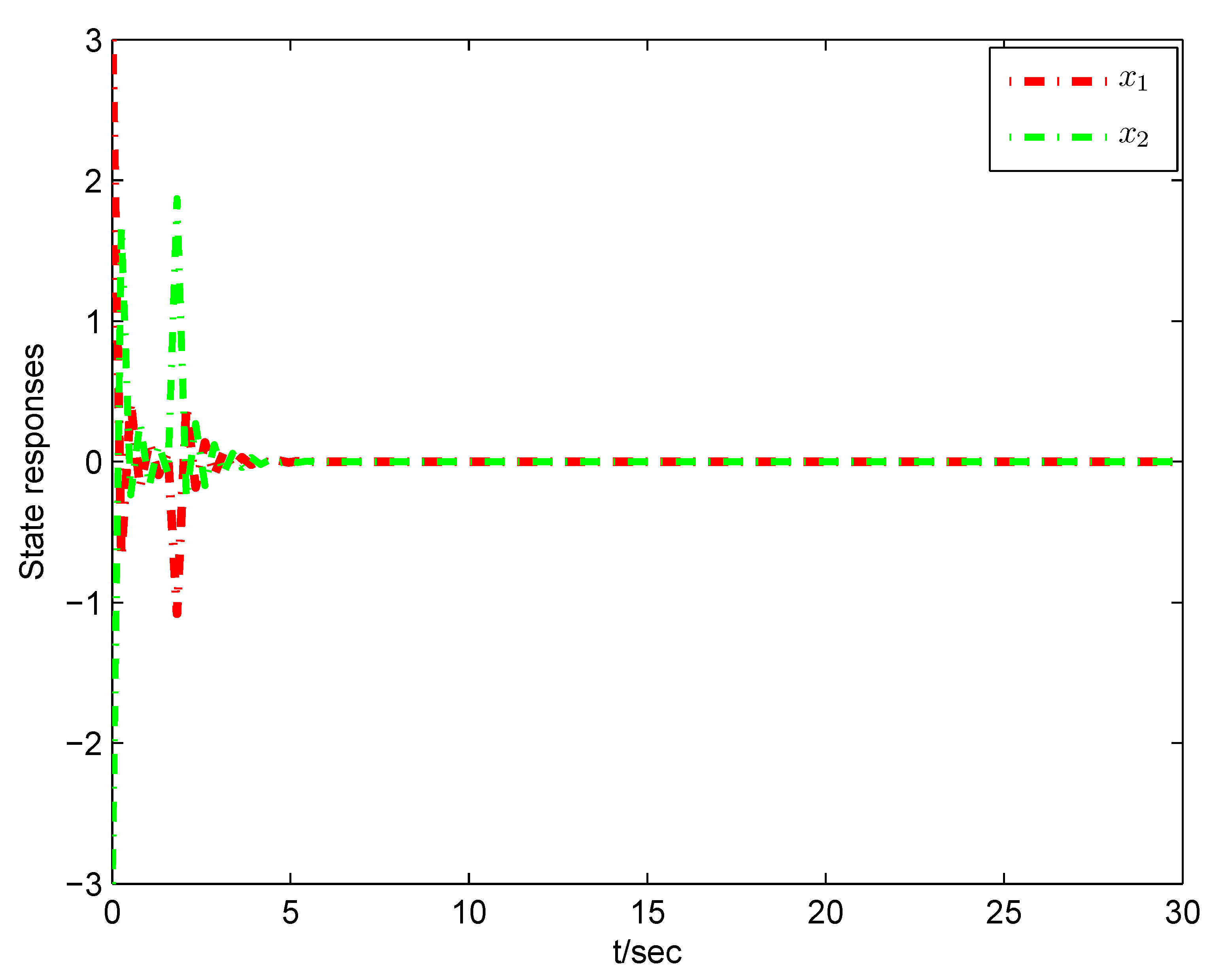
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kilbas, A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations, 1st ed.; Elsevier: New York, NY, USA, 2006; ISBN 9780444518323. [Google Scholar]
- Oldham, K.; Spainer, L. The Fractional Calculus, 1st ed.; Academic Press: New York, NY, USA, 1974; ISBN 9780080956206. [Google Scholar]
- Petráš, I. Fractional-Order Nonlinear Systems, 1st ed.; Springer: Berlin/Heidelberg, Germany; Dordrecht, The Netherlands; London, UK; New York, NY, USA, 2011; ISBN 978-3-642-18101-6. [Google Scholar]
- Podlubny, I. Fractional Differential Equations, 1st ed.; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods, 1st ed.; World Scientific: Singapore, 2012; ISBN 978-981-4355-20-9. [Google Scholar]
- Baleanu, D.; Tenreiro Machado, J.A.; Luo, A.C.J. Fractional Dynamics and Control, 1st ed.; Springer: New York, NY, USA, 2011; ISBN 978-1-4614-0456-9. [Google Scholar]
- Arbib, M. Brains, Machines, and Mathematics; Springer: New York, NY, USA, 1987; ISBN 978-0387965390. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
- Mehmood, A.; Zameer, A.; Ling, S.H.; Raja, M.A.Z. Integrated computational intelligent paradigm for nonlinear electric circuit models using neural networks, genetic algorithms and sequential quadratic programming. Neural Comput. Appl. 2020, 32, 10337–10357. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Shah, F.H.; Tariq, M.; Ahmad, I. Design of artificial neural network models optimized with sequential quadratic programming to study the dynamics of nonlinear Troesch’s problem arising in plasma physics. Neural Comput. Appl. 2018, 29, 83–109. [Google Scholar] [CrossRef]
- Sabir, Z.; Raja, M.A.Z.; Umar, M.; Shoaib, M. Design of neuro-swarming-based heuristics to solve the third-order nonlinear multi-singular Emden–Fowler equation. Eur. Phys. J. Plus 2020, 135, 410. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Raja, M.A.Z.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P. Fractional neuro-sequential ARFIMA-LSTM for financial market forecasting. IEEE Access 2020, 8, 71326–71338. [Google Scholar] [CrossRef]
- Lundstrom, B.N.; Higgs, M.H.; Spain, W.J.; Fairhall, A.L. Fractional differentiation by neocortical pyramidal neurons. Nat. Neurosci. 2008, 11, 1335–1342. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Cao, J.; Velmurugan, G. Existence and uniform stability analysis of fractional-order complex valued neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 84–97. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Functional and Impulsive Differential Equations of Fractional Order: Qualitative Analysis and Applications, 1st ed.; CRC Press: Boca Raton, FL, USA; Taylor and Francis Group: Oxfordshire, UK, 2017; ISBN 9781498764834. [Google Scholar]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S.; Yu, J. Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 2015, 154, 15–23. [Google Scholar] [CrossRef]
- Kandasamy, U.; Li, X.; Rakkiyappan, R. Quasi-synchronization and bifurcation results on fractional-order quaternion-valued neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4063–4072. [Google Scholar] [CrossRef]
- Stamov, T.; Stamova, I. Design of impulsive controllers and impulsive control strategy for the Mittag–Leffler stability behavior of fractional gene regulatory networks. Neurocomputing 2021, 424, 54–62. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time Delay Systems, 2nd ed.; Birkhuser: Boston, MA, USA, 2003; ISBN 978-1-4612-0039-0. [Google Scholar]
- Syed Ali, M.; Balasubramaniam, P. Global asymptotic stability of stochastic fuzzy cellular neural networks with multiple discrete and distributed time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2907–2916. [Google Scholar] [CrossRef]
- Syed Ali, M. Stability of Markovian jumping recurrent neural networks with discrete and distributed time-varying delays. Neurocomputing 2015, 149, 1280–1285. [Google Scholar] [CrossRef]
- Delavari, H.; Baleanu, D.; Sadati, J. Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn. 2012, 67, 2433–2439. [Google Scholar] [CrossRef]
- Stamova, I. Global Mittag-Leffler stability and synchronization of impulsive fractional-order neural networks with time-varying delays. Nonlinear Dynam. 2014, 77, 1251–1260. [Google Scholar] [CrossRef]
- Stamova, I.; Stamov, G. Mittag–Leffler synchronization of fractional neural networks with time-varying delays and reaction-diffusion terms using impulsive and linear controllers. Neural Netw. 2017, 96, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Yang, Y.; Hu, M. Asymptotic stability of delayed fractional-order neural networks with impulsive effects. Neurocomputing 2015, 154, 239–244. [Google Scholar] [CrossRef]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J. Stability analysis of fractional-order complex-valued neural networks with time delays. Chaos Solit. Fractals 2015, 78, 297–316. [Google Scholar] [CrossRef]
- Song, C.; Cao, J. Dynamics in fractional-order neural networks. Neurocomputing 2014, 142, 494–498. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S. Stability analysis of fractional order neural networks with time delay. Neural Process. Lett. 2015, 42, 479–500. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.; Wang, Q. Stability analysis of fractional-order Hopfield neural networks with discontinuous activation functions. Neurocomputing 2016, 171, 1075–1084. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI stability conditions for fractional order systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Zhang, F.R.; Li, C.P.; Chen, Y.Q. Asymptotical stability of nonlinear fractional differential system with Caputo derivative. Int. J. Differ. Equ. 2011, 2011, 635165. [Google Scholar] [CrossRef]
- Yu, J.M.; Hu, H.; Zhou, S.B.; Lin, X.R. Generalized Mittag-Leffler stability of multi-variables fractional order nonlinear systems. Automatica 2013, 49, 1798–1803. [Google Scholar] [CrossRef]
- Kamenkov, G. On stability of motion over a finite interval of time. Akad. Nauk SSSR. Prikl. Mat. Meh. 1953, 17, 529–540. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; O’Regan, D.; Akca, H. Global exponential stabilization of impulsive neural networks with unbounded continuously distributed delays. IMA J. Appl. Math. 2015, 80, 85–99. [Google Scholar] [CrossRef]
- Li, X.; Caraballo, T.; Rakkiyappan, R.; Han, X. On the stability of impulsive functional differential equations with infinite delays. Math. Methods Appl. Sci. 2015, 38, 3130–3140. [Google Scholar] [CrossRef] [Green Version]
- Nagamani, G.; Radhika, T.; Balasubramaniam, P. A delay decomposition approach for robust dissipativity and passivity analysis of neutral-type neural networks with leakage time-varying delay. Complexity 2016, 21, 248–264. [Google Scholar] [CrossRef]
- Phat, V.N.; Ratchagit, G. Stability and stabilization of switched linear discrete-time systems with interval time-varying delay. Nonlinear Anal. Hybrid Syst. 2011, 5, 605–612. [Google Scholar] [CrossRef]
- Wei, T.; Li, X.; Stojanovic, V. Input-to-state stability of impulsive reaction–diffusion neural networks with infinite distributed delays. Nonlinear Dyn. 2021, 103, 1733–1755. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Stojanovic, V. Exponential stability of nonlinear state-dependent delayed impulsive systems with applications. Nonlinear Anal. Hybrid Syst. 2021, 42, 101088. [Google Scholar] [CrossRef]
- Cheng, J.; Zhong, S.; Zhong, Q.; Zhu, H.; Du, Y. Finite-time boundedness of state estimation for neural networks with time-varying delays. Neurocomputing 2014, 129, 257–264. [Google Scholar] [CrossRef]
- He, S.; Liu, F. Finite-time boundedness of uncertain time-delayed neural network with Markovian jumping parameters. Neurocomputing 2013, 103, 87–92. [Google Scholar] [CrossRef]
- Syed Ali, M.; Saravanan, S. Robust finite-time H∞ control for a class of uncertain switched neural networks of neutral-type with distributed time varying delays. Neurocomputing 2016, 177, 454–468. [Google Scholar]
- Yao, D.; Lu, Q.; Wu, C.; Chen, Z. Robust finite-time state estimation of uncertain neural networks with Markovian jump parameters. Neurocomputing 2015, 159, 257–262. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, P.; Nguang, S.K.; Zhang, J.; Karimi, H.R. Finite-time boundedness for uncertain discrete neural networks with time-delays and Markovian jumps. Neurocomputing 2014, 140, 1–7. [Google Scholar] [CrossRef]
- Chen, L.; Liu, C.; Wu, R.; He, Y.; Chai, Y. Finite-time stability criteria for a class of fractional-order neural networks with delay. Neural Comput. Appl. 2016, 27, 549–556. [Google Scholar] [CrossRef]
- Ding, X.; Cao, J.; Zhao, X.; Alsaadi, F.E. Finite-time stability of fractional-order complex-valued neural networks with time delays. Neural Process. Lett. 2017, 46, 561–580. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J. Finite-time stability analysis of fractional-order complex-valued memristor based neural networks with time delays. Nonlinear Dyn. 2014, 78, 2823–2836. [Google Scholar] [CrossRef]
- Yang, X.; Song, Q.; Liu, Y.; Zhao, Z. Finite-time stability analysis of fractional-order neural networks with delay. Neurocomputing 2015, 152, 19–26. [Google Scholar] [CrossRef]
- Du, F.; Lu, J.G. New criteria on finite-time stability of fractional-order Hopfield neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3858–3866. [Google Scholar] [CrossRef] [PubMed]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Houming, Finite-time stability for fractional-order complex-valued neural networks with time delay. Appl. Math. Comput. 2020, 365, 124715. [Google Scholar]
- Rajivganthi, C.; Rihan, F.A.; Lakshmanan, S.; Muthukumar, P. Finite-time stability analysis for fractional-order Cohen–Grossberg BAM neural networks with time delays. Neural Comput. Appl. 2018, 29, 1309–1320. [Google Scholar] [CrossRef]
- Martynyuk, A.A.; Martynyuk-Chernienko, Y.A. Uncertain Dynamical Systems. Stability and Motion Control, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019; ISBN 978-0367382070. [Google Scholar]
- Amato, F.; Ariola, M.; Dorato, P.P. Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001, 37, 1459–1463. [Google Scholar] [CrossRef]
- Gunasekaran, N.; Thoiyab, N.M.; Muruganantham, P.; Rajchakit, G.; Unyong, B.A. Novel results on global robust stability analysis for dynamical delayed neural networks under parameter uncertainties. IEEE Access 2000, 8, 178108–178116. [Google Scholar] [CrossRef]
- Song, Q.; Wang, Z. New results on passivity analysis of uncertain neural networks with time-varying delays. Int. J. Comput. Math. 2010, 87, 668–678. [Google Scholar] [CrossRef]
- Xiang, Z.; Sun, Y.N.; Mahmoud, M.S. Robust finite-time H∞ control for a class of uncertain switched neutral systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1766–1778. [Google Scholar] [CrossRef]
- Lu, Z.; Zhu, Y. Nonlinear impulsive problems for uncertain fractional differential equations. Chaos Solit. Fractals 2022, 157, 111958. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I. Uncertain impulsive differential systems of fractional order: Almost periodic solutions. Int. J. Syst. Sci. 2018, 49, 631–638. [Google Scholar] [CrossRef]
- Vu, H.; Hoa, N.V. Uncertain fractional differential equations on a time scale under Granular differentiability concept. Comp. Appl. Math. 2019, 38, 38–110. [Google Scholar] [CrossRef]
- Camacho, N.A.; Mermoud, M.A.D.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Ma, Y.; Wu, B.; Wang, Y. Finite-time stability and finite-time boundedness of fractional order linear systems. Neurocomputing 2016, 173, 2076–2082. [Google Scholar] [CrossRef]
- Ye, H.; Gao, J.; Ding, Y. A generalized Gronwall inequality and its application to a fractional differential equation. J. Math. Anal. Appl. 2007, 328, 1075–1081. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Priya, B.; Thakur, G.K.; Ali, M.S.; Stamov, G.; Stamova, I.; Sharma, P.K. On the Finite-Time Boundedness and Finite-Time Stability of Caputo-Type Fractional Order Neural Networks with Time Delay and Uncertain Terms. Fractal Fract. 2022, 6, 368. https://doi.org/10.3390/fractalfract6070368
Priya B, Thakur GK, Ali MS, Stamov G, Stamova I, Sharma PK. On the Finite-Time Boundedness and Finite-Time Stability of Caputo-Type Fractional Order Neural Networks with Time Delay and Uncertain Terms. Fractal and Fractional. 2022; 6(7):368. https://doi.org/10.3390/fractalfract6070368
Chicago/Turabian StylePriya, Bandana, Ganesh Kumar Thakur, M. Syed Ali, Gani Stamov, Ivanka Stamova, and Pawan Kumar Sharma. 2022. "On the Finite-Time Boundedness and Finite-Time Stability of Caputo-Type Fractional Order Neural Networks with Time Delay and Uncertain Terms" Fractal and Fractional 6, no. 7: 368. https://doi.org/10.3390/fractalfract6070368
APA StylePriya, B., Thakur, G. K., Ali, M. S., Stamov, G., Stamova, I., & Sharma, P. K. (2022). On the Finite-Time Boundedness and Finite-Time Stability of Caputo-Type Fractional Order Neural Networks with Time Delay and Uncertain Terms. Fractal and Fractional, 6(7), 368. https://doi.org/10.3390/fractalfract6070368