1. Introduction
The nonlinear Schrödinger equation is one of the most fundamental equations of quantum physics, and can be used to describe many nonlinear phenomena such as fluid dynamics, waves in water, plasma, and self-focusing in laser pulses. Different approximation schemes have been used to investigate different kinds of nonlinear Schrödinger equations [
1,
2,
3].
Fractional calculus is one of the most widely popular calculus types, with a vast range of applications in many different scientific and engineering disciplines. The order of derivatives in fractional calculus can be any real number, which distinguishes it from ordinary calculus, where the order of derivatives can only be natural numbers. Fractional calculus is a powerful and versatile tool for modeling a wide range of scientific phenomena, including image processing, earthquake engineering, biomedical engineering, computational fluid mechanics, and physics. In recent decades, the conventional Schrödinger equation has been generalized to a fractional order partial differential equation that takes into consideration the Riemann–Liouville, Caputo, and Riesz derivatives instead of the classical Laplacian [
4,
5,
6,
7]. The Caputo fractional derivative is considered here because it allows traditional initial and boundary conditions to be included in the formulation of the problem [
8]. It is not easy to obtain the exact solutions of TFSE, although it can be found in some special cases [
9,
10,
11,
12]. In general cases, we need some convenient numerical techniques for solving the TFSE.
The approximate solutions of TFSE have been studied by many authors. Zhang et al. [
13] proposed a fully discrete scheme using the
scheme based on graded mesh for the discretiaztion of temporal Caputo derivative and the spectral method for spatial discretization for TFSE with initial singularity. Li et al. [
14] solved the TFSE using a non-polynomial spline. Liu and Jiang in [
15] proposed a new scheme based on the reproducing kernel theory and collocation method for solving the TFSE. Esen and Orkun [
16,
17] proposed a cubic B-spline collocation method and a quadratic B-spline Galerkin method to obtain the numerical solutions of TFSEs, respectively. The authors in [
18] suggested the Crank–Nicolson difference algorithm for solving the time-space FSEs. Space fractional variable-order Schrödinger equation solved numerically via the Crank-Nicolson scheme by Atangana and Cloot [
19]. Wei et al. [
20] developed an implicit fully discrete local discontinuous Galerkin technique for solving the TFSE, and an extended method for coupled TFSEs [
21]. Yaseen et al. [
22] discussed the solution of the sub-diffusion equation of fractional order using a cubic trigonometric B-spline method. Bhrawya and Abdelkawy [
23] developed the collocation method to solve one-and two-dimensional fractional Schrödinger equations subject to initial-boundary and non-local conditions.
The authors in [
24] used a hybrid numerical method based on a cubic trigonometric B-spline to solve Fisher’s reaction-diffusion problem. Heydari and Atangana [
25] used the operational matrix method based on the shifted Legendre cardinal functions for solving the nonlinear variable-order of TFSE. Erfanian, et al. in [
26] applied cubic B-splines based on the finite-difference formula for solving the TFSEs. the MFVIM is used for finding approximate and exact solutions of the TFSEs by Hong [
10]. Zhang et al. [
27] propose a Crank-Nicolson Galerkin-Legendre spectral scheme for the one-dimensional nonlinear SFSEs. Wang and Huang [
28] carried out a rigorous numerical analysis on the conservative Crank-Nicolson finite difference scheme for discretizing the SFSE with the Riesz space fractional derivative.
For the analytical solution of the nonlinear fractional Schrödinger equation, one can refer to the residual power series method [
29], double Laplace transform [
30], homotopy analysis transform method [
31], generalized Kudryshov method [
32], adomian decomposition method [
33], generalized Riccati equation mapping method and the modified Kudryashov method [
34], and the fractional Riccati expansion method [
35].
In this paper, we applied the cubic Trigonometric B-Spline Algorithm [
22,
24,
36] to obtain the numerical solutions of the following TFSE:
subject to the initial-boundary conditions
where
and the fractional partial derivative of order
in Equation (
1) is Caputo derivative, defined by Murio [
37] and Podlubny [
6],
To obtain a finite element scheme for solving TFSE, the first-order approximation of time fractional Caputo derivative will be discretized utilizing the so-called
approximation [
3,
38]:
where
is the time step size and
Lemma 1. ([7,14]) Let and , then as . We decompose the complex functions
into its real and imaginary parts
and
, respectively.
Substituting Equation (
4) into Equation (
1) results in coupled system of nonlinear partial differential equations
where
and
are the real and imaginary parts of the
, respectively. Furthermore, we have initial conditions of Equation (
1) as follows:
where
and
are the real and imaginary parts of
, respectively, and the boundary conditions as
where
and
are the real and imaginary parts of the
, respectively, and
and
are the real and imaginary parts of the
, respectively.
2. Derivation of the Numerical Method
Consider Equation (
1) and assume that
be
N uniform divides of the interval
with space step size
and
, where
The cubic trigonometric B-spline basis functions
at the knots
are given by:
where
.
The values of
and their first and second derivatives at notes points are given by
Table 1.
Let
and
be an approximations solutions of
R and
S, respectively, then from Equation (
3)
Substituting Equations (
7) and (
8) and by implementing Crank-Nicolson scheme to Equations (
5) and (
6) we obtain
where
the nonlinear terms in Equations (
9) and (
10) are linearized using the form given by Rubin and Graves [
39] as:
thus we obtain the following equations
After some simple arrangements for Equations (
11) and (
12), we obtain
where
and
The approximate solution of
and
can be written in terms of
and the unknown weighting coefficients
and
, respectively, as follows:
Using Equation (
15) and values of
shown in
Table 1, the approximate solutions of
and their derivatives are determined according to the time parameters as follows:
Substituting Equations (
16) and (
17) into Equations (
13) and (
14), we obtain a recurrence scheme with unknown parameters
and
as follows:
where
and
Equations (
18)–(
21) yields a system consisting of
equations with
unknowns
,
four additional constraints are required to obtain a unique solution to the resulting system. These are obtained by imposing boundary conditions.
These conditions are used to eliminate
from Equations (
18)–(
21) . The initial conditions and their first derivatives are used to obtain initial vectors
and
, as follows
which can be resolved using a proper algorithm.
3. Stability Analysis
In this section, we use the Von Neumann method to analyze the stability of the scheme (
18)–(
21). First, we linearize the nonlinear terms
R and
S as local constants
and
, respectively, as is done in the Von Neumann method. According to Duhamel’s principle, the stability analysis for an inhomogeneous problem is assumed to be an immediate outcome of the stability analysis for the corresponding homogeneous case. Therefore, the stability analysis for the scheme (
18)–(
21) for the force-free situation (
) is sufficient.
Let
and
where
and
are the approximate solutions of system (
18)–(
21), we can easily obtain the following round-off error equations
where
and
Suppose that Equations (
22)–(
25) have solutions of the form
where
and
is real. Substituting Equation (
26) into Equations (
22)–(
25), dividing by
, using the relation and collecting the like terms, we obtain
Substituting values of
and
in Equations (
27)–(
30), and after some rearrangement and dividing by
, we obtain
where
and
Using Wolfram Mathematica to solve the last system, we obtain
Assuming that
is sufficiently small so that
, we obtain
Using Equation (
1) and the iterative formulas in Equation (
35), we obtain
4. Numerical Results
In this section, we present the numerical results of the proposed method on two test problems. The accuracy of the present method is measured by the
and
error norms as follows:
where
and
are the exact and numerical solutions, respectively.
Example 1. In this example, we will consider the TFSE Equation (
1)
with initial-boundary conditions The exact solution of this problem is given by [16,17] In Equation (
1),
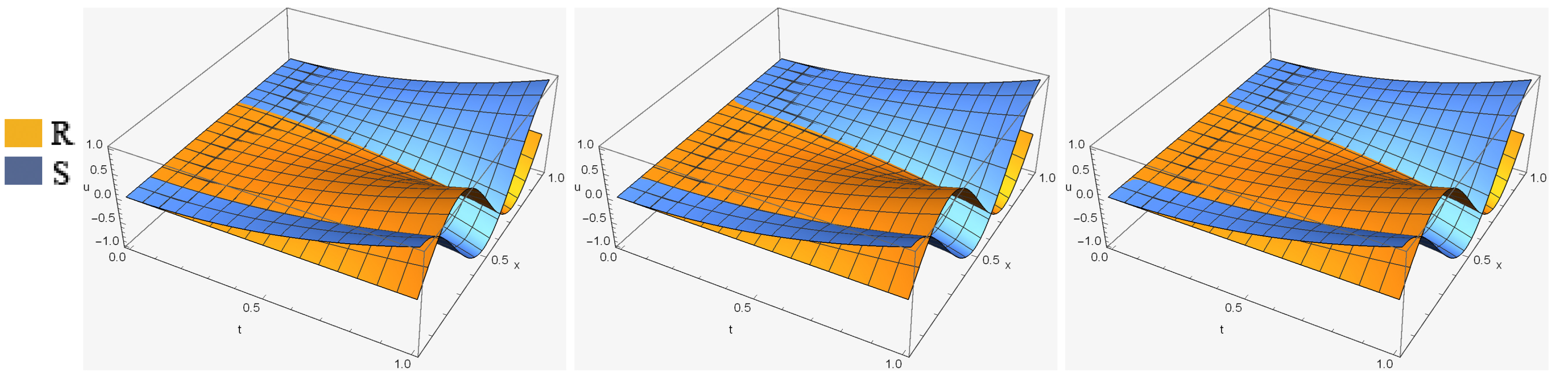
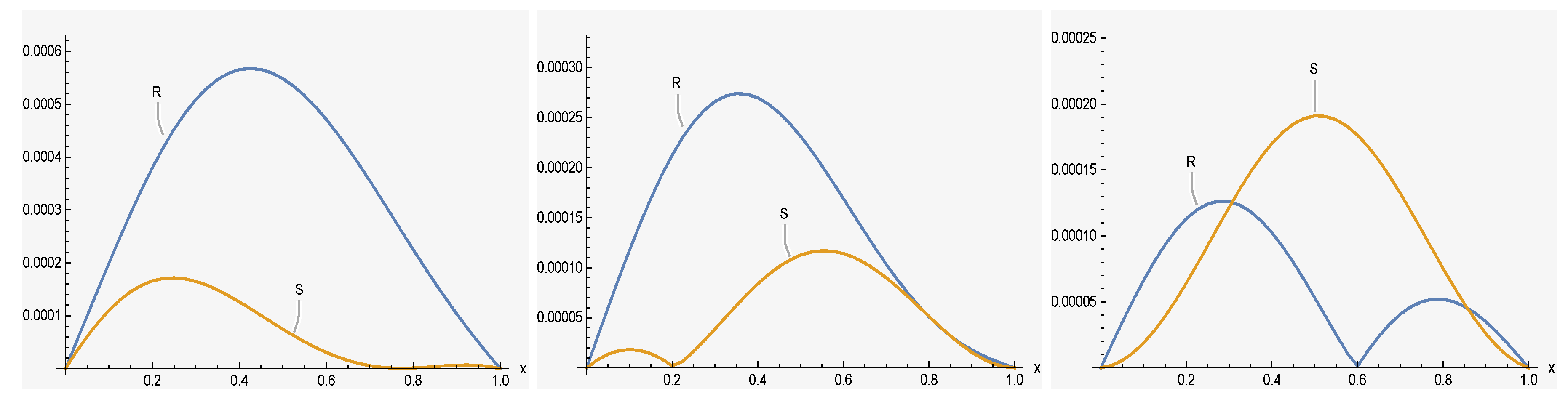
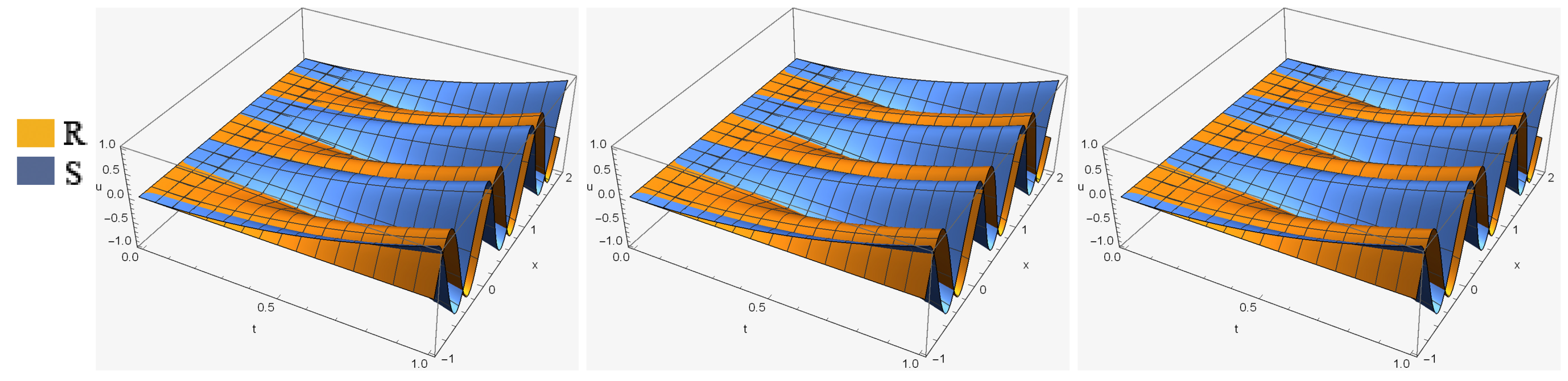
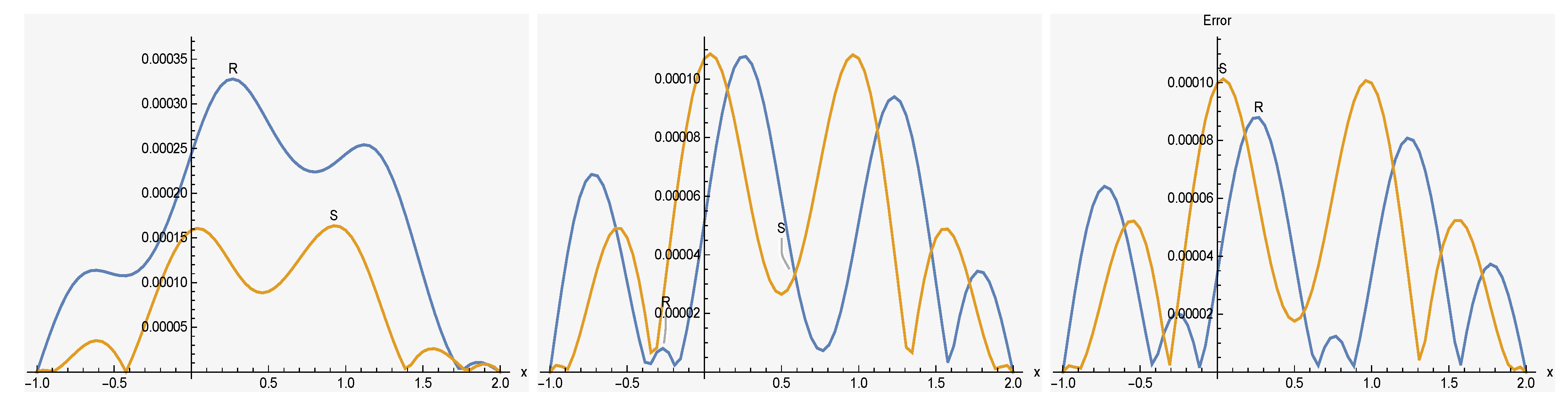
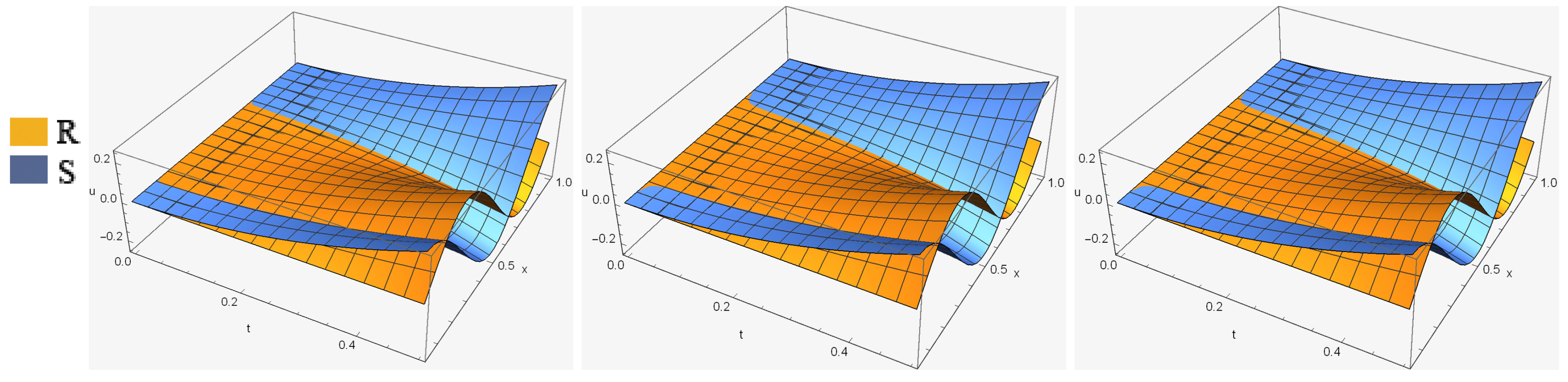
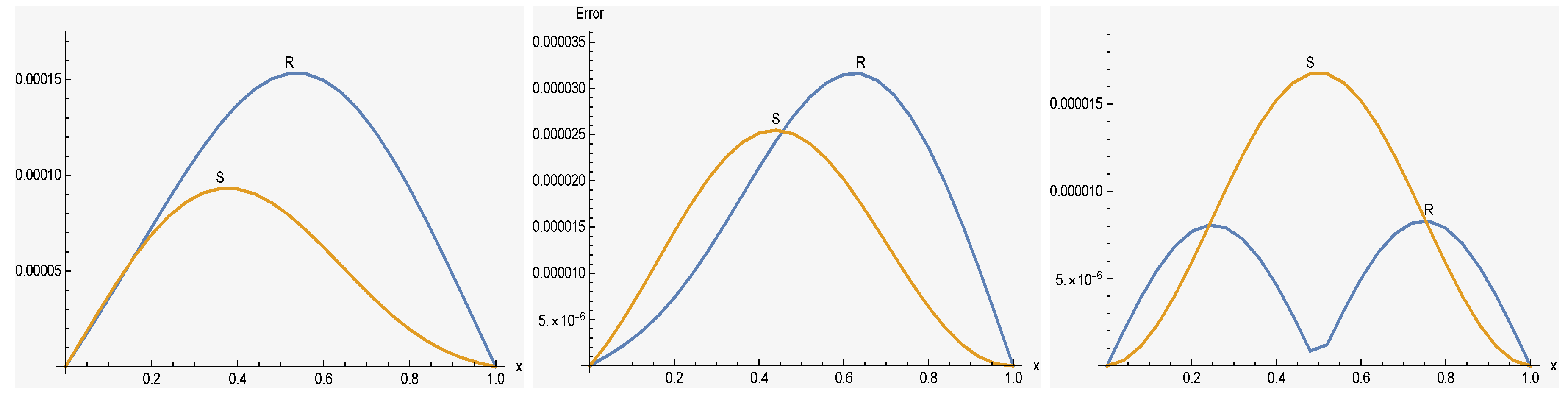
we tested the efficiency and stability of the mentioned method by performing it for three different sets of parameters. For the first set, we chose and to compare with the previous papers [16,17,40]. Real and imaginary parts of a solution of , as well as and error norms (for the first set) from our method have been computed and listed in Table 2 and Table 3, respectively. As it shows, the error norms and got by our method are marginally less than the others. Approximate solutions of and are more accurate whenever the value of α decreases. Real and imaginary parts of solution of (for the first set and ) are demonstrate in Figure 1. Additionally, errors of and are shown in Figure 2. For the second set, we chose and The and − error norms of real and imaginary parts of a solution of have been computed and listed in Table 4 and Table 5, respectively. In this set, we increase k and expand the region of the solution and by appropriate division, we got more accurate results, which are demonstrated in Figure 3. Additionally, error distributions of R and S are shown in Figure 4. Finally, we tested the efficiency and stability of the chosen method by performing it for different values of , and region of solution. Thus, in the finally set, we took and Numerical results of and of our proposed method, in addition to the the and error norms in solutions, are shown in Table 6 and Table 7, respectively. It is seen that while the value of α decreases, the numerical results become more accurate, we can clearly see this situation from the decreasing values of the and error norms. The accuracy of the numerical method is measured by computing the difference between the exact and numerical solutions at each point of division. As it is clear from the tables, the proposed algorithm gives better accuracy compared with the other. Graphs of numerical solutions and error distributions of R and S are presented in Figure 5 and Figure 6, respectively. Table 8 shows a comparison of the maximum absolute error for our results with the results in [40]. Example 2. In this example, we will consider the TFSE Equation (
1)
with initial-boundary conditions where The exact solution of this problem is given by
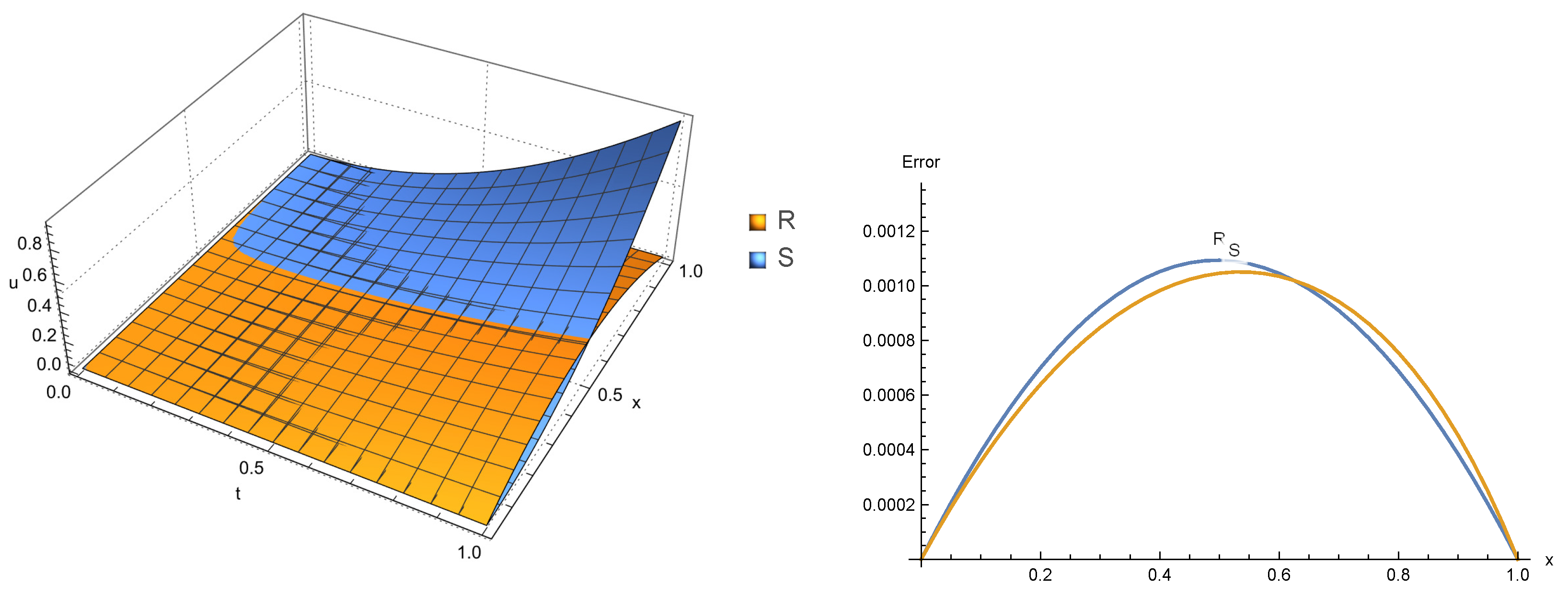
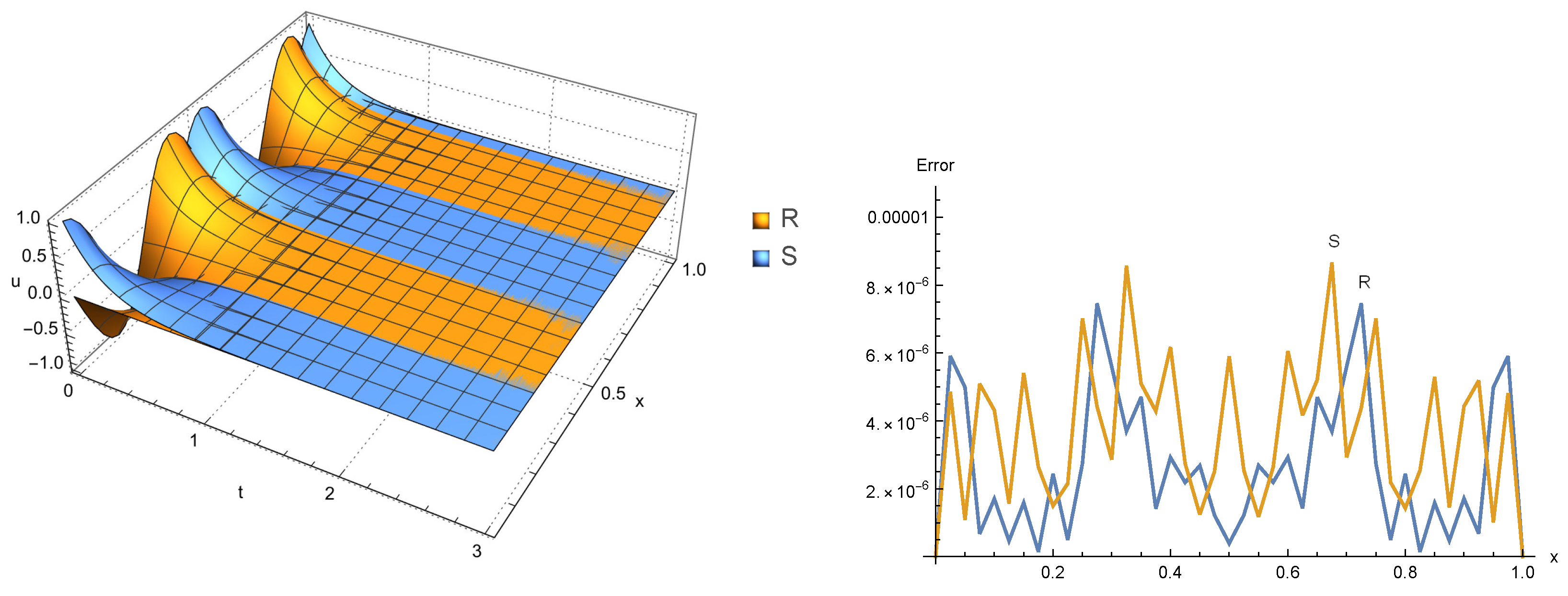
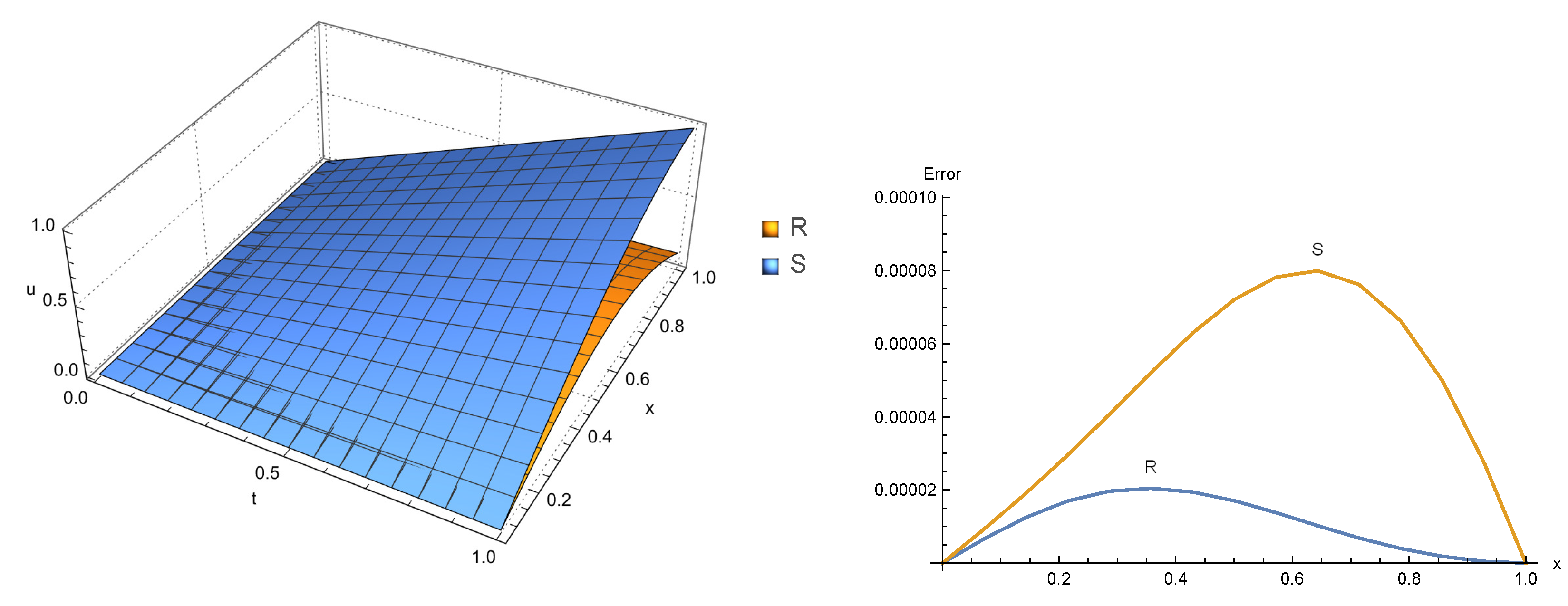
This example has been solved using the presented method with various values of Table 9 shows the numerical results based on maximum absolute errors acquired using the suggested approach for real and imaginary parts of the solution at . Figure 7 illustrates the surface graph and curve of the absolute error of real and imaginary parts of the solution at and . Example 3. Consider fractional model of TFSE Equation(1) with initial-boundary conditions where where is a Ceiling function. The exact solution of this problem is given by
Table 10 presented the and error norms for real and imaginary parts of the solution for different choices of τ, and . Figure 8 depicts the approximate solutions and error curves of absolute error obtained by the current approach for the real and imaginary sections of for at and . Example 4. To demonstrate that proposed technique may be applied to TFSE with non-local conditions, we consider the TFSE Equation (
1)
with the initial-boundary and non-local conditions where, The exact solution of this problem is given by
we solved this example using the presented method with various choices of α at and Table 11 lists the and error norms for real and imaginary parts of . In case , we display the surface of real and imaginary parts of the approximate solution and the carves of of the absolute error in Figure 9. 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}