
State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter

 ,
, 
 ,
,  ,
,
Abstract
:1. Introduction
- (1)
- Inherits the advantages of the SR-UKF. The algorithm can be directly applied to the prediction and estimation of nonlinear systems, ensures the positive semi-definiteness of the state covariance matrix, and improves the stability of the numerical calculations.
- (2)
- Takes advantage of the tools of fractional calculus to describe the dynamics of lithium batteries.
- (3)
- Uses the new SOC estimation method, yielding better results than other schemes, namely the EKF, SR-UKF, and FUKF, as shown by tests conducted under three different temperatures and three distinct working conditions.
2. Preliminaries
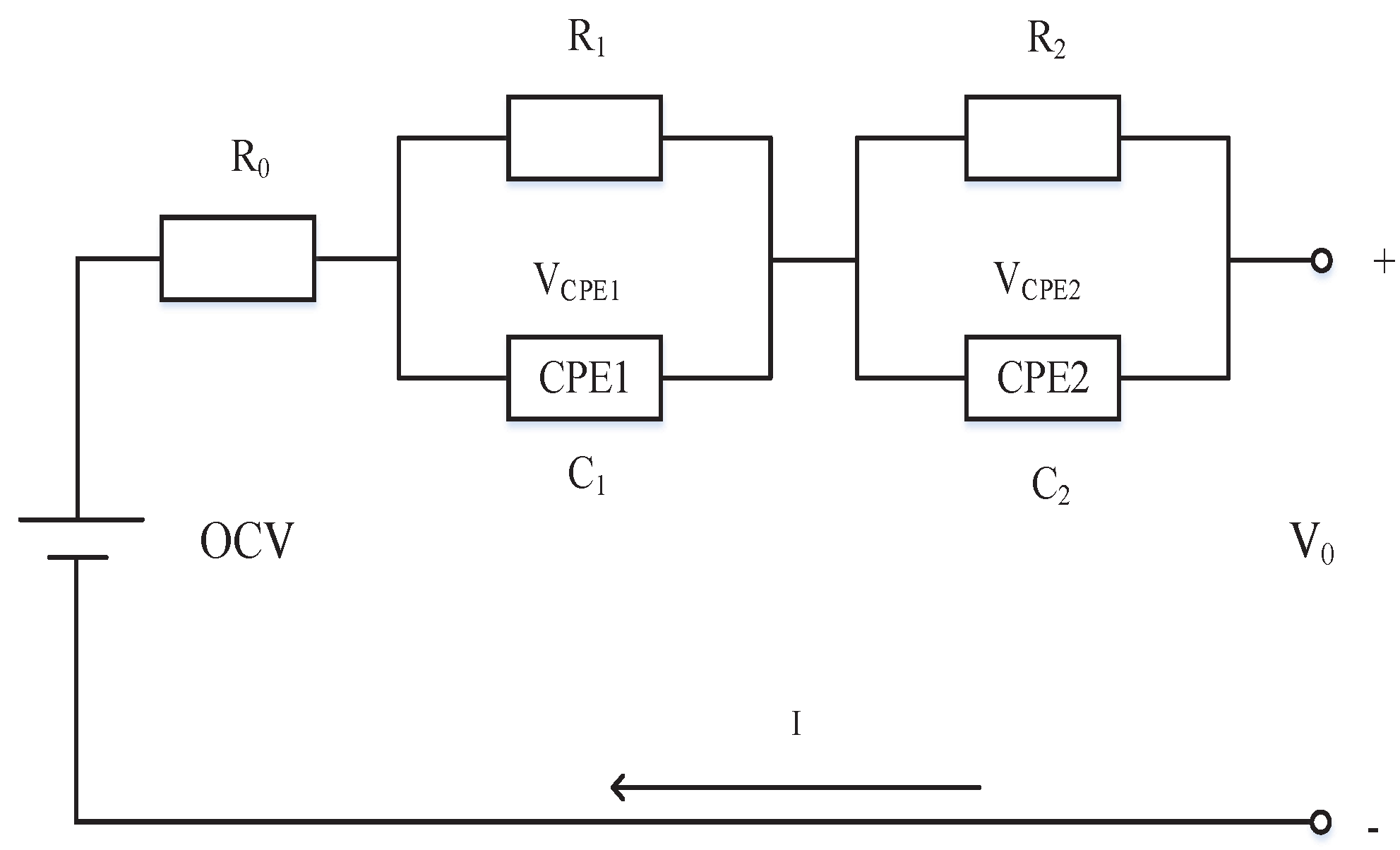
3. Fractional Order Modeling of Lithium-Ion Batteries
4. Model Parameter Identification and Validation
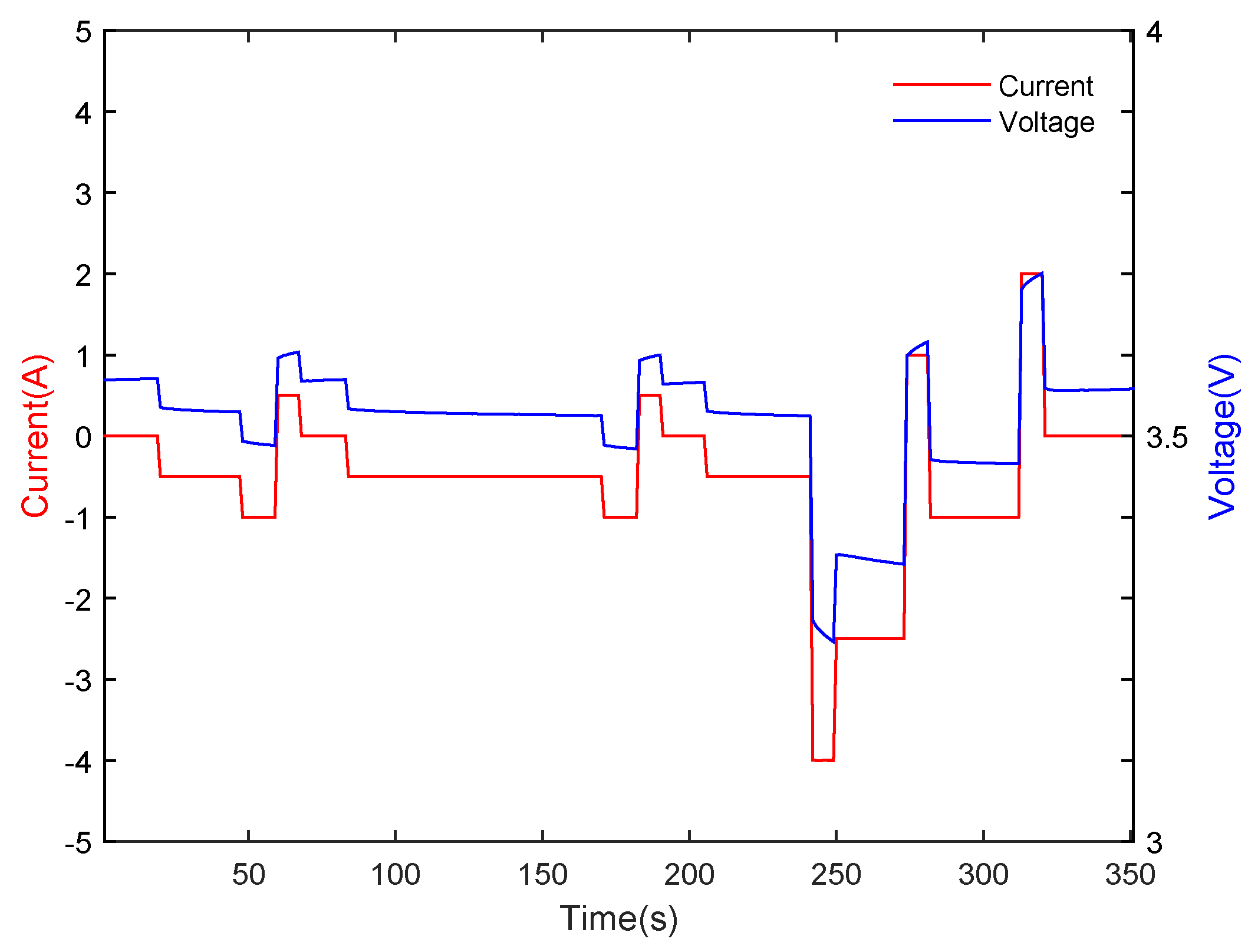
4.1. Description of the Experimental Data
4.2. Parameter Identification
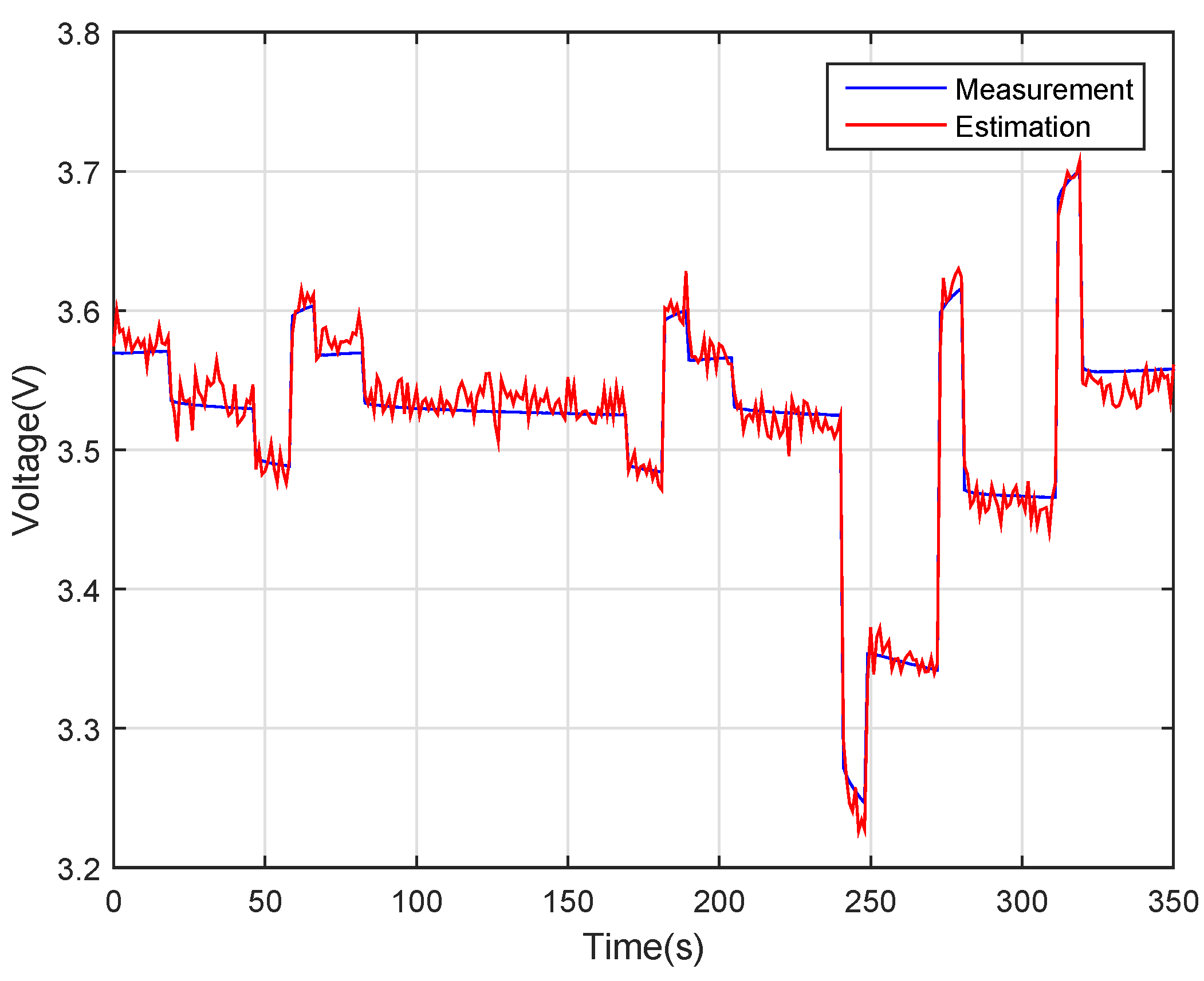
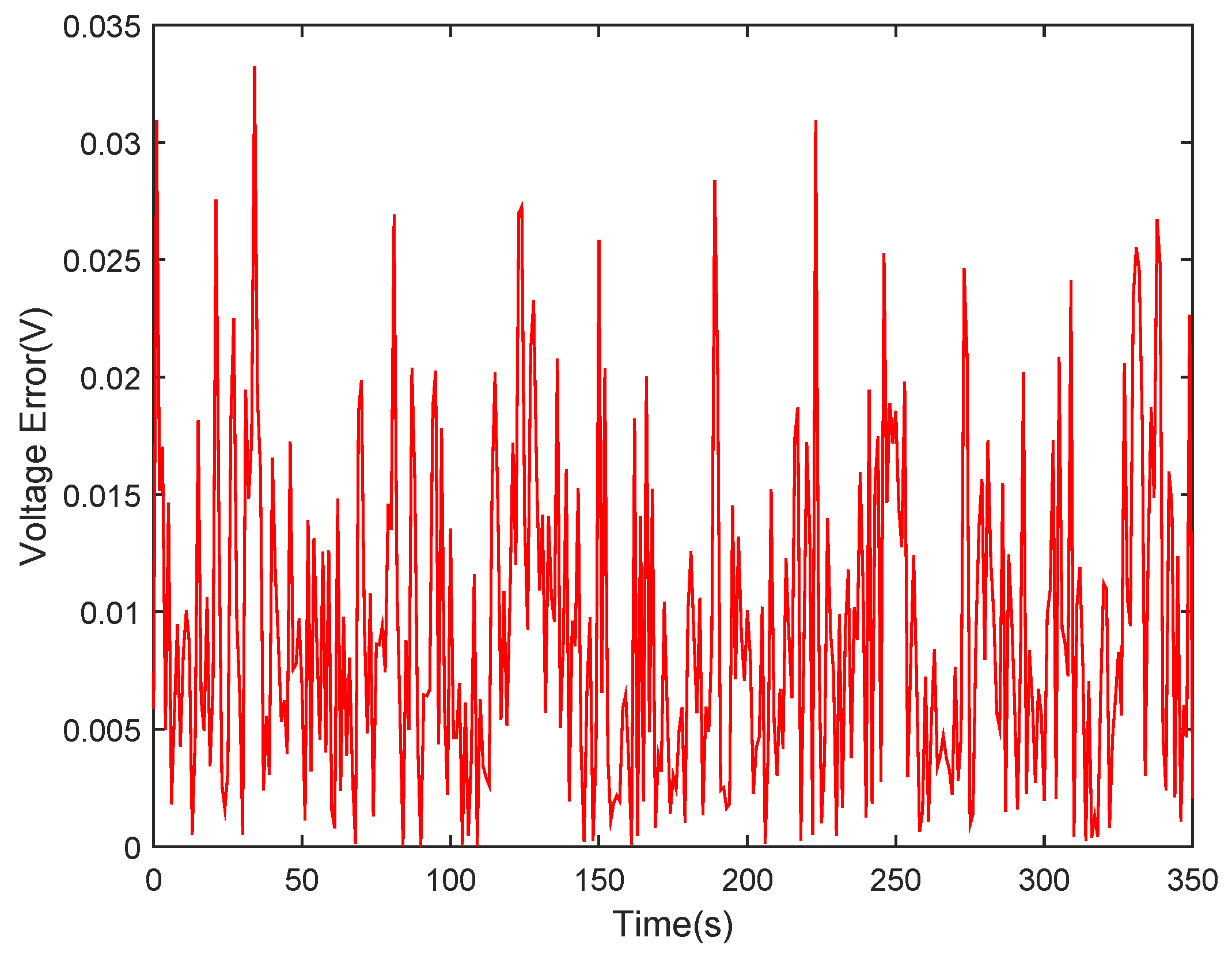
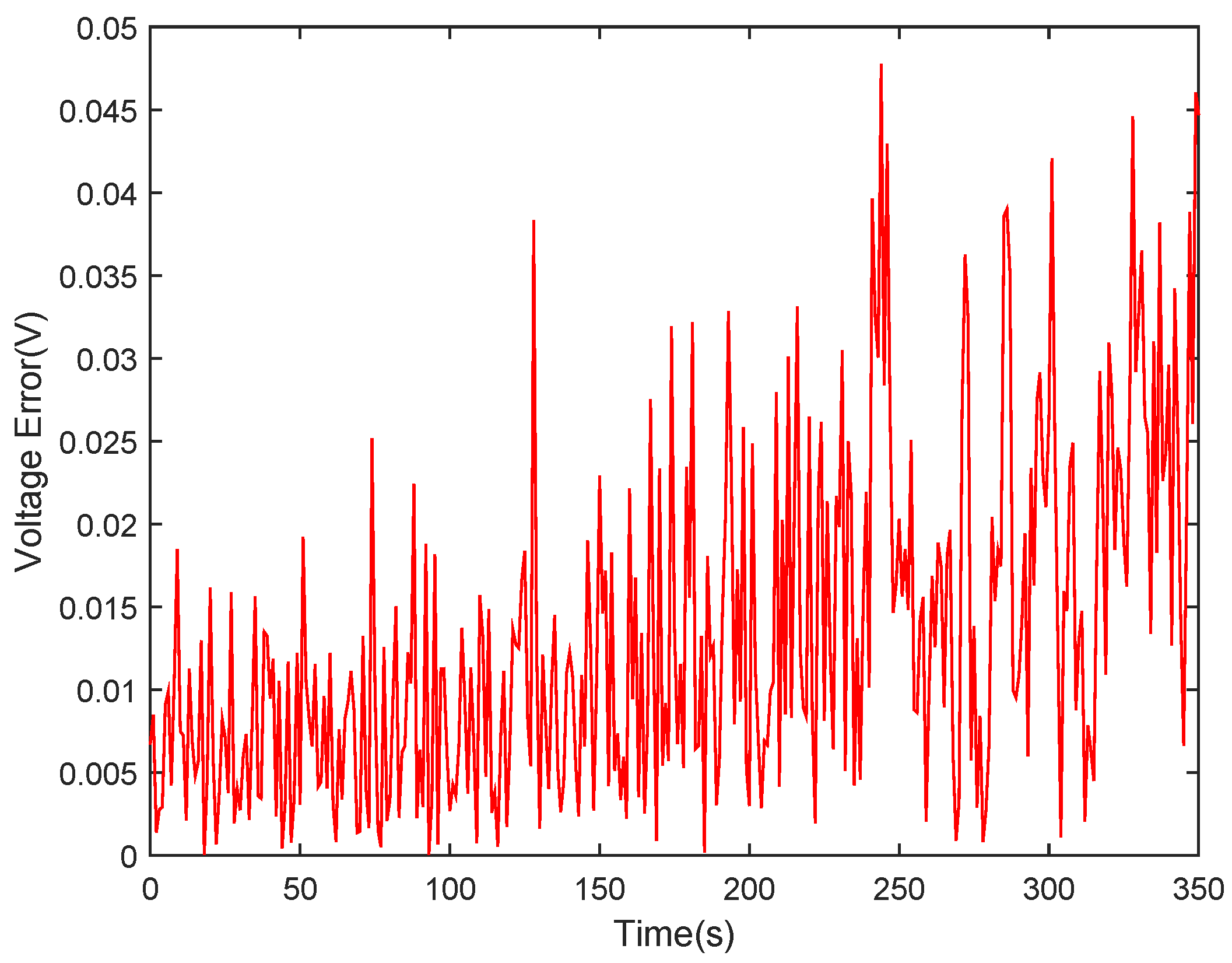
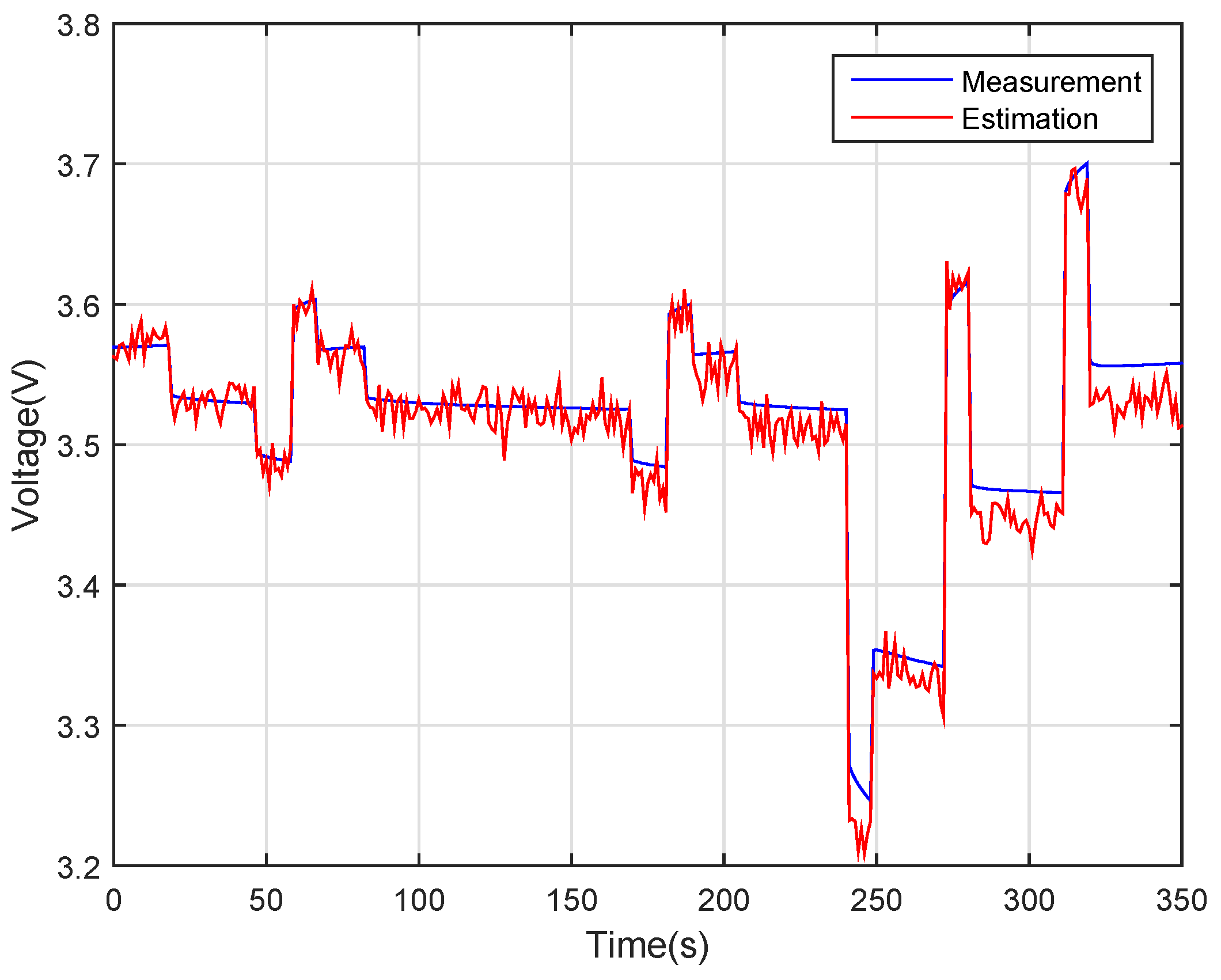
4.3. Model Accuracy Verification
4.4. Model Parameters Sensitivity Analysis
5. SOC Estimation
- (1)
- InitializationSpecify the initial state , the matrices Q and H, and the initial state estimation error covariance . Set the Cholesky factor of the covariance as , and define ( represents the Cholesky decomposition).
- (2)
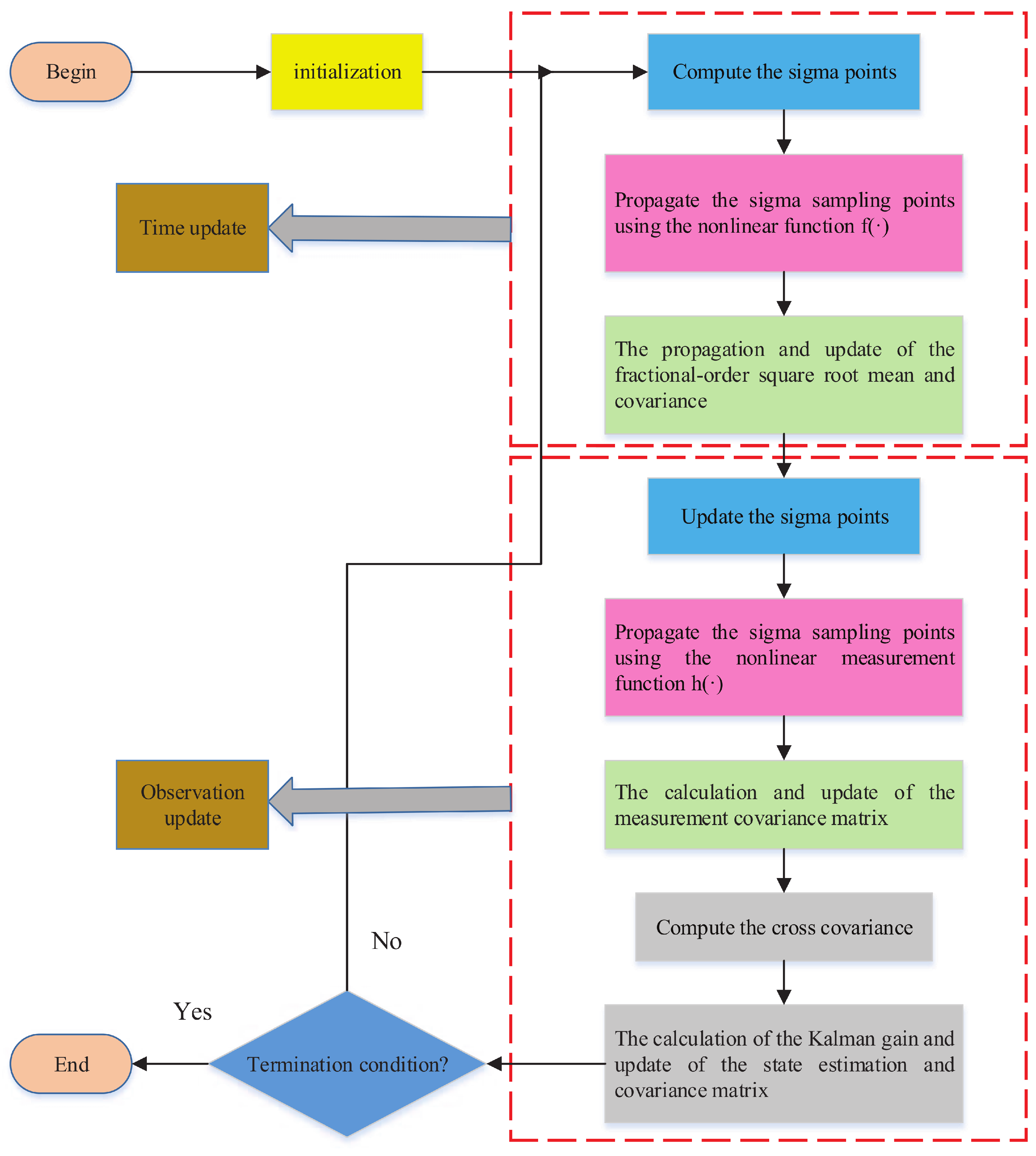
- Time updating
- (a)
- Calculate sigma sampling points:where n denotes the dimension of the system, and is the jth column of . The weight of each sampling point is calculated as follows:where and are the weights of the mean of the sampling points and the covariance, respectively. The parameter is a scaling factor that can be used to reduce the total prediction error of the system. The non-negative factor generally takes a small positive value to reduce the influence of the higher-order moments, and k is the turning parameter. The non-negative weight coefficient is used to reduce the peak error of the estimated state and to improve the accuracy of the covariance.
- (b)
- Propagate the sigma sampling points using the nonlinear function :
- (c)
- Update the prior states estimation:The square root mean and covariance propagation update is:where denotes the decomposition, and represents the Cholesky factor updating.
- (3)
- Observation updating
- (a)
- Update the sigma points:where the weight remains equal to the one in Equation (22).
- (b)
- Propagate the sigma sampling points using the nonlinear measurement function :
- (c)
- Calculate the observation-error covariance matrix:
- (d)
- Compute the cross covariance matrix:
- (e)
- Update the posterior states estimation:
6. Simulation Verification and Discussion
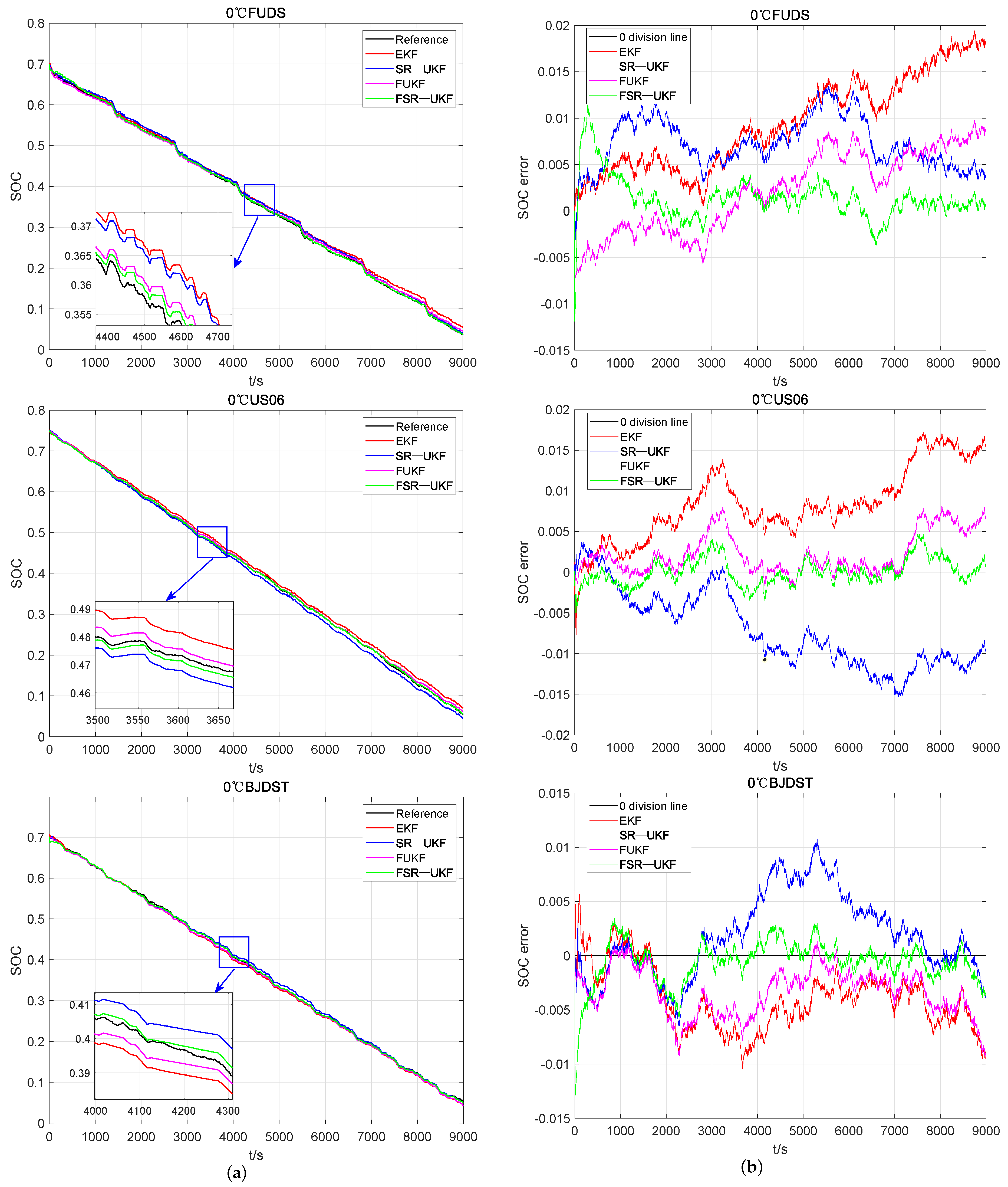
6.1. Verification of the Algorithm at Low Temperatures 0 C
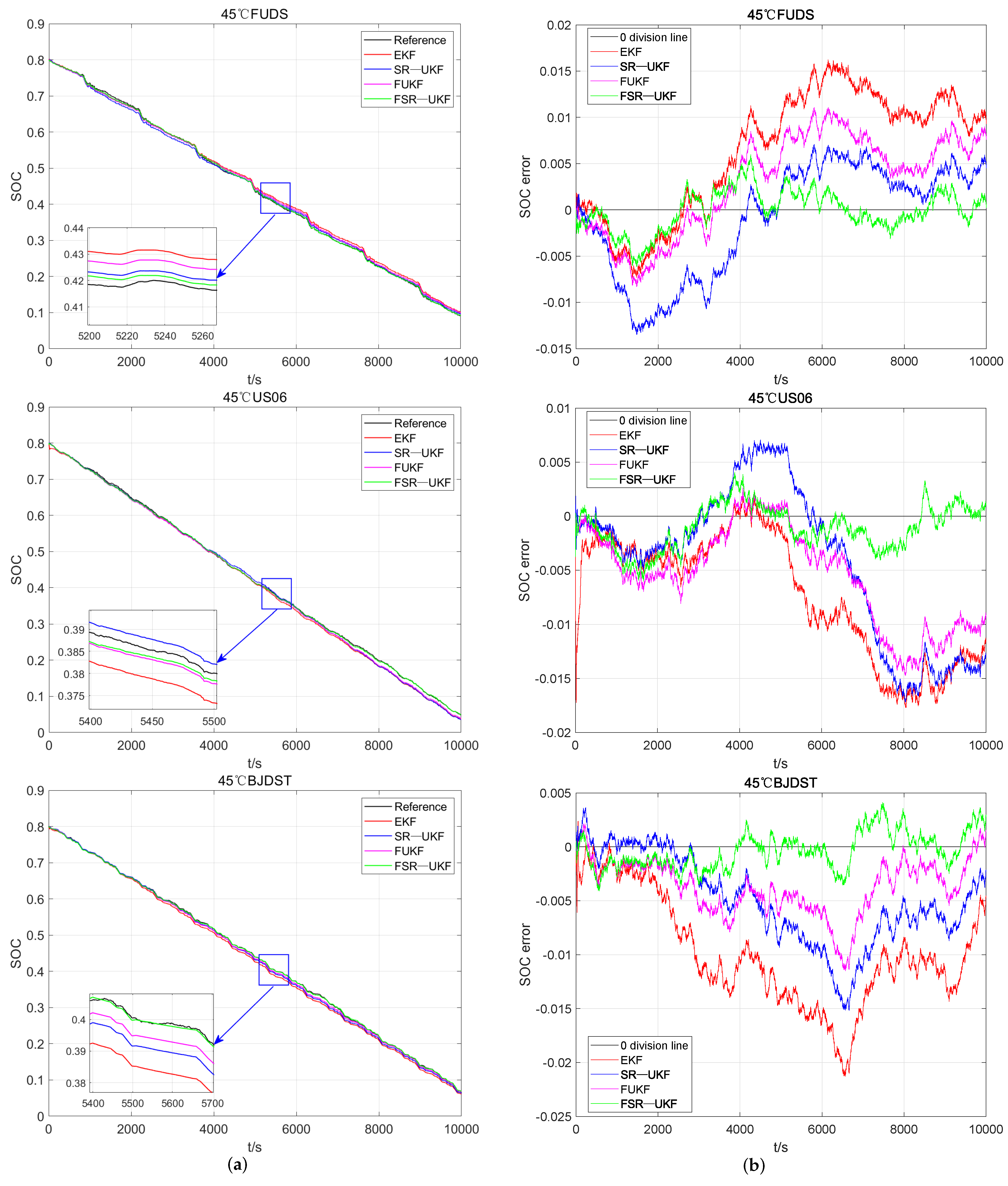
6.2. Verification of the Algorithm at High Temperatures 45 C
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saw, L.H.; Ye, Y.; Tay, A.A.O. Integration issues of lithium-ion battery into electric vehicles battery pack. J. Clean. Prod. 2016, 113, 1032–1045. [Google Scholar] [CrossRef]
- Diouf, B.; Pode, R. Potential of lithium-ion batteries in renewable energy. Renew. Energy 2015, 76, 375–380. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; Wang, J.; He, H.; Peng, S.; Pecht, M. Lithium-ion battery health prognosis based on a real battery management system used in electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 4110–4121. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Xiong, Q.; Ding, B.; Hou, J.; Luo, D.; Rong, Y.; Li, S. State-of-health estimation and remaining useful life prediction for the lithium-ion battery based on a variant long short term memory neural network. J. Power Sources 2020, 459, 228069. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Grosu, R.; Deng, Z.; Hou, J.; Rong, Y.; Wu, R. An end-to-end neural network framework for state-of-health estimation and remaining useful life prediction of electric vehicle lithium batteries. Renew. Sustain. Energy Rev. 2022, 156, 111843. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K.; Ho, H.F. Battery management system (BMS) and SOC development for electrical vehicles. IEEE Trans. Veh. Technol. 2011, 60, 76–88. [Google Scholar] [CrossRef]
- Zou, C.; Hu, X.; Wei, Z.; Tang, X. Electrothermal dynamics conscious Lithium-ion battery cell-level charging management via state monitored predictive control. Energy 2017, 141, 250–259. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Seaman, A.; Dao, T.S.; Mcphee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Sources 2014, 256, 410–423. [Google Scholar] [CrossRef] [Green Version]
- Nejad, S.; Gladwin, D.T.; Stone, D.A. A systematic review of lumped parameter equivalent circuit models for real-time estimation of lithium-ion battery state. J. Power Sources 2016, 316, 183–196. [Google Scholar]
- Huang, J.; Li, Z.; Liaw, B.Y.; Zhang, J. Graphical analysis of electrochemical impedance spectroscopy data in Bode and Nyquist representations. J. Power Sources 2016, 309, 82–98. [Google Scholar] [CrossRef]
- Zhou, X.; Huang, J.; Pan, Z.; Ouyang, M. Impedance characterization of lithium-ion batteries aging under high-temperature cycling: Importance of electrolyte-phase diffusion. J. Power Sources 2019, 426, 216–222. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, J.; Cao, B.; Li, X. A simplified fractional order impedance model and parameter identification method for lithium-ion batteries. PLoS ONE 2017, 12, e0172424. [Google Scholar] [CrossRef]
- Zou, C.; Zhang, L.; Hu, X.; Wang, Z.; Wik, T.; Pecht, M. A review of fractional-order techniques applied to lithium-ion batteries, lead-acid batteries, and supercapacitors. J. Power Sources 2018, 390, 286–296. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Li, S.E.; Peng, H.; Liu, Z. Fractional-order modeling and parameter identification for lithium-ion batteries. J. Power Sources 2015, 293, 151–161. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Liao, X. State-of-art survey of fractional order modeling and estimation methods for lithium-ion batteries. Fract. Calc. Appl. Anal. 2019, 22, 1449–1479. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W.; Wang, J.; Yang, R. Online simultaneous identification of parameters and order of a fractional order battery model. J. Clean. Prod. 2019, 247, 119147. [Google Scholar] [CrossRef]
- Wang, Y.; Li, M.; Chen, Z. Experimental study of fractional-order models for lithium-ion battery and ultra-capacitor: Modeling, system identification, and validation. Appl. Energy 2020, 278, 115736. [Google Scholar] [CrossRef]
- Yu, M.; Li, Y.; Podlubny, I.; Gong, F.; Zhang, C. Fractional-order modeling of lithium-ion batteries using additive noise assisted modeling and correlative information criterion. J. Adv. Res. 2020, 25, 49–56. [Google Scholar] [CrossRef]
- Hu, X.; Yuan, H.; Zou, C.; Li, Z.; Zhang, L. Co-estimation of state of charge and state of health for lithium-ion batteries based on fractional-order calculus. IEEE Trans. Veh. Technol. 2018, 67, 10319–10329. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Shen, W.; Sun, F. A novel fractional order model for state of charge estimation in lithium ion batteries. IEEE Trans. Veh. Technol. 2019, 68, 4130–4139. [Google Scholar] [CrossRef]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M. A state of charge estimation method for lithium-ion batteries based on fractional order adaptive extended Kalman filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Mawonou, K.; Eddahech, A.; Dumur, D.; Beauvois, D.; Godoy, E. Improved state of charge estimation for Li-ion batteries using fractional order extended Kalman filter. J. Power Sources 2019, 435, 226710. [Google Scholar] [CrossRef]
- Gholizade-Narm, H.; Charkhgard, M. Lithium-ion battery state of charge estimation based on square-root unscented Kalman filter. IET Power Electron. 2013, 6, 1833–1841. [Google Scholar] [CrossRef]
- Aung, H.; Low, K.S. Temperature dependent state-of-charge estimation of lithium ion battery using dual spherical unscented Kalman filter. IET Power Electron. 2015, 8, 2026–2033. [Google Scholar] [CrossRef]
- Wang, K.; Feng, X.; Ren, J.; Duan, C.; Li, L. State of charge (SOC) estimation of lithium-ion battery based on adaptive square root unscented Kalman filter. Int. J. Electrochem. Sci. 2020, 15, 9499–9516. [Google Scholar]
- Jiang, C.; Wang, S.; Wu, B.; Fernandez, C.; Xiong, X.; Coffie-Ken, J. A state-of-charge estimation method of the power lithium-ion battery in complex conditions based on adaptive square root extended Kalman filter. Energy 2021, 219, 119603. [Google Scholar] [CrossRef]
- Aung, H.; Soon Low, K.; Ting Goh, S. State-of-Charge estimation of lithium-ion battery using square root spherical unscented Kalman filter (Sqrt-UKFST) in nanosatellite. IEEE Trans. Power Electron. 2015, 30, 4774–4783. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Waag, W.; Kaebitz, S.; Sauer, D.U. Application-specific parameterization of reduced order equivalent circuit battery models for improved accuracy at dynamic load. Measurement 2013, 46, 4085–4093. [Google Scholar] [CrossRef]
- Wang, B.; Liu, Z.; Li, S.E.; Moura, S.J.; Peng, H. State-of-Charge estimation for lithium-ion batteries based on a nonlinear fractional model. IEEE Trans. Control. Syst. Technol. 2017, 25, 3–11. [Google Scholar] [CrossRef]
- Zheng, F.; Xing, Y.; Jiang, J.; Sun, B.; Kim, J.; Pecht, M. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries. Appl. Energy 2016, 183, 513–525. [Google Scholar] [CrossRef]
- Li, B.; Bei, S. Estimation algorithm research for lithium battery SOC in electric vehicles based on adaptive unscented Kalman filter. Neural Comput. Appl. 2018, 31, 8171–8183. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, D.; Zhu, Q.; Liu, W.; Liu, C.; Xiong, N. A new state of charge estimation algorithm for lithium-ion batteries based on the fractional unscented Kalman filter. Energies 2017, 10, 1313. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.5975 | 264.25 | 1.2679 | 448.54 | 0.4325 | 0.4380 |
| 0.0788 | 0.8513 | 92.65 | 0.5337 | 75.34 |
| RMSE | EKF | SR-UKF | FUKF | FSR-UKF |
|---|---|---|---|---|
| FUDS | 1.09% | 0.66% | 0.64% | 0.19% |
| US06 | 0.89% | 0.34% | 0.31% | 0.17% |
| BJDST | 0.92% | 0.74% | 0.41% | 0.19% |
| RMSE | EKF | SR-UKF | FUKF | FSR-UKF |
|---|---|---|---|---|
| FUDS | 1.07% | 0.77% | 0.49% | 0.27% |
| US06 | 0.95% | 0.85% | 0.34% | 0.16% |
| BJDST | 0.50% | 0.42% | 0.40% | 0.21% |
| RMSE | EKF | SR-UKF | FUKF | FSR-UKF |
|---|---|---|---|---|
| FUDS | 0.93% | 0.61% | 0.61% | 0.22% |
| US06 | 0.93% | 0.82% | 0.70% | 0.23% |
| BJDST | 1.11% | 0.65% | 0.45% | 0.17% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Wu, X.; Tenreiro Machado, J.A.; Lopes, A.M.; Li, P.; Dong, X. State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter. Fractal Fract. 2022, 6, 52. https://doi.org/10.3390/fractalfract6020052
Chen L, Wu X, Tenreiro Machado JA, Lopes AM, Li P, Dong X. State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter. Fractal and Fractional. 2022; 6(2):52. https://doi.org/10.3390/fractalfract6020052
Chicago/Turabian StyleChen, Liping, Xiaobo Wu, José A. Tenreiro Machado, António M. Lopes, Penghua Li, and Xueping Dong. 2022. "State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter" Fractal and Fractional 6, no. 2: 52. https://doi.org/10.3390/fractalfract6020052
APA StyleChen, L., Wu, X., Tenreiro Machado, J. A., Lopes, A. M., Li, P., & Dong, X. (2022). State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter. Fractal and Fractional, 6(2), 52. https://doi.org/10.3390/fractalfract6020052