



Fault Diagnosis of Hydroelectric Units Based on a Novel Multiscale Fractional-Order Weighted Permutation Entropy



Abstract
1. Introduction
2. IMFWPE-Based Hydroelectric Unit Fault Diagnosis Model
2.1. Fractional-Order Entropy
2.2. Improved Multiscale Fractional-Order Weighted Permutation Entropy
- (1)
- For a time series of length , a new time series is obtained by the improved coarse-graining method at the scale factor .
- (2)
- The variance of adjacent elements in the time series is calculated so that the weight can be defined as
- (3)
- According to the set time delay and embedding dimension , the time series in corresponding to each scale factor are reconstructed and ordered in phase space, respectively, then the probability of any of the permutation patterns after weighting can be expressed as,
- (4)
- According to the fractional-order entropy definition, IMFWPE can be defined as
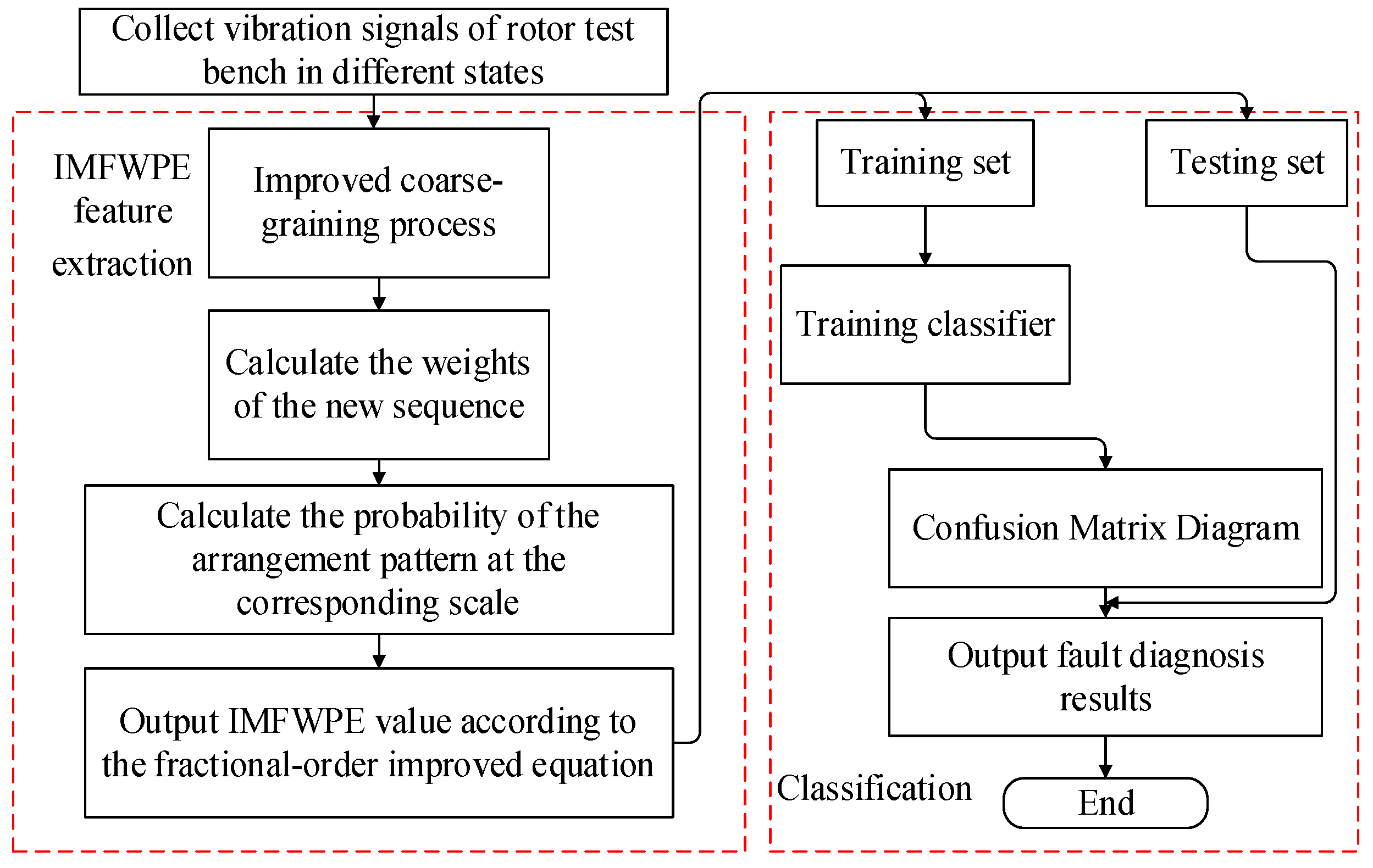
2.3. Flow of the Fault Diagnosis Method Based on IMFWPE
- (1)
- Data acquisition: Use sensors to collect the vibration data of the rotor test bench in different states, and take N sets of vibration signals of length as samples.
- (2)
- Feature extraction: The sample signals are processed using the improved coarse-grain process, weights of the new sequences and the probabilities under the corresponding permutation patterns are calculated, and finally the IMFWPE values are obtained as the feature sample set by Equation (17).
- (3)
- Fault identification: The training set and testing set are divided from the feature sample set in a certain ratio, and the training set is input to the classifier for training to construct a fault classifier. The testing set is then input to the trained classifier for fault diagnosis, results are visualized with confusion matrix graphs, and the fault identification is finally completed.
3. IMFWPE Performance Analysis and Parameter Determination
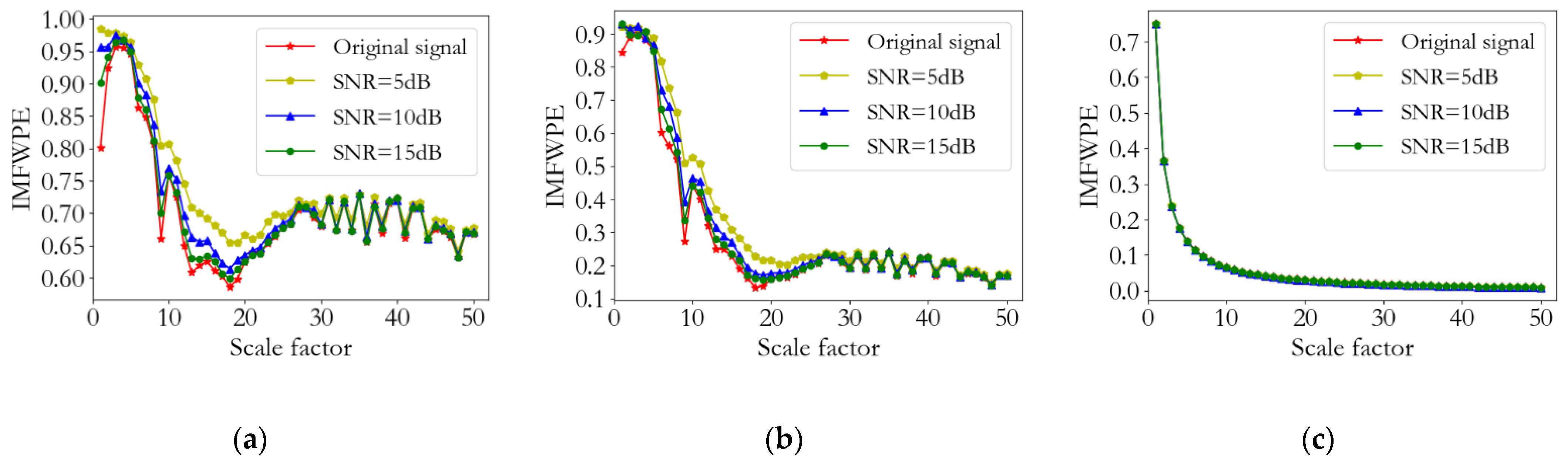
3.1. IMFWPE Noise Immunity Analysis
3.2. Feature Extraction Capability of IMFWPE
3.3. Parameter Selection in IMFWPE
4. Experimental Verification
4.1. Case 1
4.2. Case 2
5. Conclusions
- (1)
- The fractional-order entropy concept and weighting theory were introduced on the basis of PE. On the basis of improved coarse-graining process, a new tool for measuring the complexity of time-series IMFWPE was proposed. By analyzing the distribution of entropy values of simulated signals with different signal-to-noise ratios and their correlation coefficients, the good noise immunity was verified.
- (2)
- The feature extraction ability of four multiscale entropies, IMFWPE, IMFPE, IMPE, and MSE, for different types of rotor fault vibration signals under different noises was compared and visualized using the t-SNE algorithm. The results showed that IMFWPE had good feature extraction ability under different noise intensity environments.
- (3)
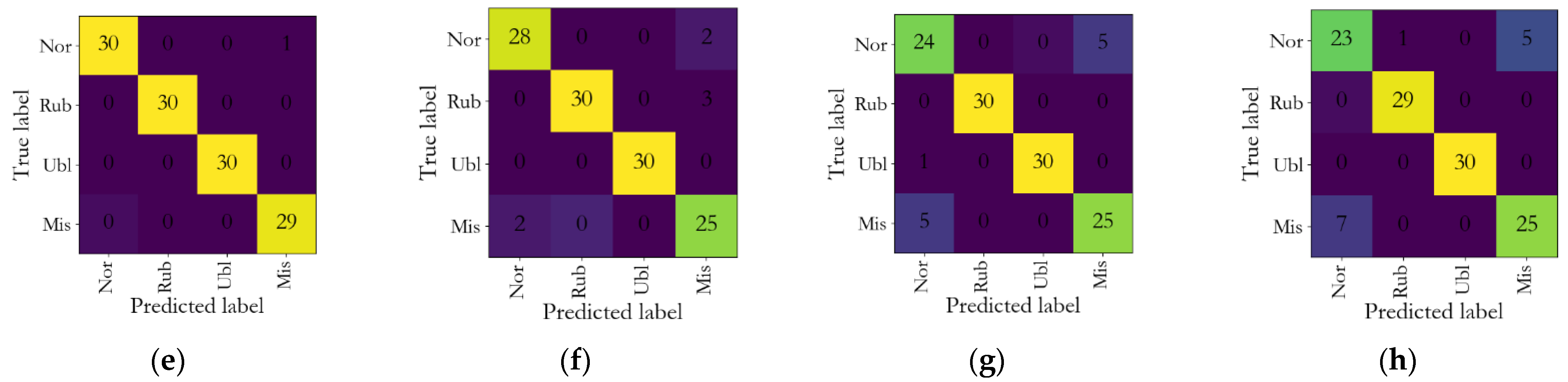
- Through the diagnostic analysis of four types of rotor fault signals, the proposed method was combined with RF and XGBoost classifiers, and independent repetitive experiments were conducted using the cross-validation method. The results show that the proposed method has good performance at no less than 98.06% under different folding numbers, and the standard deviation of the proposed method is only 0.68. The proposed method has the best performance among the compared models, which verifies the superiority and stability of the method.
- (4)
- The proposed method is applied to actual data from hydroelectric units. Its diagnosis rate reaches 100%, which verifies that the method can still achieve good results in an actual hydroelectric unit environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, D.; Wang, X.; Huang, J.; Zhang, X.; Xiao, Z. Vibration fault diagnosis for hydro-power units based on Bayesian network. J. Hydroelectr. Eng. 2019, 38, 112–120. (In Chinese) [Google Scholar] [CrossRef]
- Wang, Z.; Hong, J.; Liu, P.; Zhang, L. Voltage fault diagnosis and prognosis of battery systems based on entropy and Z-score for electric vehicles. Appl. Energy 2016, 196, 289–302. [Google Scholar] [CrossRef]
- Gu, D.; Kim, J.; Kelimu, T.; Huh, S.C.; Choi, B.K. Evaluation of the use of envelope analysis and DWT on AE signals generated from degrading shafts. Mater. Sci. Eng. B 2012, 177, 1683–1690. [Google Scholar] [CrossRef]
- Shi, Y.; Yi, C.; Lin, J.; Zhuang, Z.; Lai, S. Ensemble empirical mode decomposition-entropy and feature selection for pantograph fault diagnosis. J. Vib. Control. 2020, 26, 107754632091662. [Google Scholar] [CrossRef]
- Chen, D.; Mao, C.; Qin, B. Study on transformer fault diagnosis technology of VMD local signal de-noising based on kurtosis-approximate entropy. Diagnostyka 2020, 1, 81–87. [Google Scholar] [CrossRef][Green Version]
- Jiang, W.; Hu, X.; Zhang, P.; Deng, S.; Xiao, Z. Feature extraction of vibration signals of hydroelectric units based on EEMD approximate entropy. J. Hydroelectr. Eng. 2020, 39, 18–27. (In Chinese) [Google Scholar] [CrossRef]
- Wu, H.; Zhou, J.; Xie, C.; Zhang, J.; Huang, Y. Two-dimensional time series sample entropy algorithm: Applications to rotor axis orbit feature identification. Mech. Syst. Signal Process. 2021, 147, 107123. [Google Scholar] [CrossRef]
- Guo, X.; Shen, Y.; Yang, S. Application of sample entropy and Fractional Fourier transform in the fault diagnosis of rolling bearings. J. Vib. Shock. 2017, 36, 65–69. (In Chinese) [Google Scholar] [CrossRef]
- Chen, J.; Zhou, D.; Lyu, C.; Lu, C. An integrated method based on CEEMD-SampEn and the correlation analysis algorithm for the fault diagnosis of a gearbox under different working conditions. Mech. Syst. Signal Process. 2017, 113, 102–111. [Google Scholar] [CrossRef]
- Govind, V.; Sumika, C.; Manpreet, S.; Rajesh, K. Bearing defect identification by swarm decomposition considering permutation entropy measure and opposition-based slime mould algorithm. Measurement 2021, 178, 109389. [Google Scholar] [CrossRef]
- Khandaker, N.; Wang, D.; Peng, Z.; He, Q. Oscillation based permutation entropy calculation as a dynamic nonlinear feature for health monitoring of rolling element bearing. Measurement 2021, 172, 108891. [Google Scholar] [CrossRef]
- Sharma, S.; Tiwari, S.K.; Singh, S. Integrated approach based on flexible analytical wavelet transform and permutation entropy for fault detection in rotary machines. Measurement 2021, 169, 108389. [Google Scholar] [CrossRef]
- Zhen, X.; Zhou, G.; Ren, H.; Fu, Y. Fault diagnosis of rolling bearing based on variational mode decomposition and permutation entropy. J. Vib. Shock. 2017, 36, 22–28. (In Chinese) [Google Scholar] [CrossRef]
- Li, Y.; Mu, L.; Gao, P. Particle Swarm Optimization Fractional Slope Entropy: A New Time Series Complexity Indicator for Bearing Fault Diagnosis. Fractal Fract. 2022, 6, 345. [Google Scholar] [CrossRef]
- Li, Y.; Gao, P.; Tang, B.; Yi, Y.; Zhang, J. Double Feature Extraction Method of Ship-Radiated Noise Signal Based on Slope Entropy and Permutation Entropy. Entropy 2021, 24, 22. [Google Scholar] [CrossRef]
- Ibrahim, R.W.; Darus, M. Analytic Study of Complex Fractional Tsallis’ Entropy with Applications in CNNs. Entropy 2018, 20, 722. [Google Scholar] [CrossRef]
- Abou Jaoude, A. The paradigm of complex probability and Claude Shannon’s information theory. Syst. Sci. & Control Eng. 2017, 5, 380–425. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Jia, M. Rolling bearing fault diagnosis based on VMD-MPE and PSO-SVM. Entropy 2021, 23, 762. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Ren, M.; He, M.; Jin, L. Rolling Bearing Fault Diagnosis Based on Multiscale Permutation Entropy and SOA-SVM. Machines 2022, 10, 485. [Google Scholar] [CrossRef]
- Zhao, J.; Ning, J.; Ning, Y.; Chen, C.; Li, Y. Feature extraction of mechanical fault diagnosis based on multiscale arrangement entropy and linear local tangent space arrangement. J. Vib. Shock. 2021, 40, 136–145. (In Chinese) [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Improved multiscale permutation entropy for biomedical signal analysis: Interpretation and application to electroencephalogram recordings. Biomed. Signal Process. Control. 2016, 23, 28–41. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Y.; Dai, Q. Gear compound fault detection method based on improved multiscale permutation entropy and local mean decomposition. J. Vibroengineering 2021, 23, 1171–1183. [Google Scholar] [CrossRef]
- Xue, S.; Tan, J.; Shi, L.; Deng, J. Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD Improved Permutation Entropy, and PSO-SVM. Entropy 2020, 22, 209. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Cui, Y.; Li, L.; Chen, R.; Dong, L.; Du, J. Hierarchical Amplitude-Aware Permutation Entropy-Based Fault Feature Extraction Method for Rolling Bearings. Entropy 2022, 24, 310. [Google Scholar] [CrossRef] [PubMed]
- Gong, J.; Yang, X.; Feng, K.; Liu, W.; Zhou, F.; Liu, Z. An integrated health condition detection method for rolling bearings using time-shift multi-scale amplitude-aware permutation entropy and uniform phase empirical mode decomposition. Meas. Sci. Technol. 2021, 32, 125103. [Google Scholar] [CrossRef]
- Zhang, X.; Dai, L. Image Enhancement Based on Rough Set and Fractional Order Differentiator. Fractal Fract. 2022, 6, 214. [Google Scholar] [CrossRef]
- Hu, W.; Tang, R.; Li, C.; Zhou, T.; Chen, K. Fractional order modeling and recognition of nitrogen content level of rubber tree foliage. J. Near Infrared Spectrosc. 2021, 29, 42–52. [Google Scholar] [CrossRef]
- Zhao, H.; Gan, S.; Yuan, X.; Hu, L.; Wang, J.; Liu, S. Application of a Fractional Order Differential to the Hyperspectral Inversion of Soil Iron Oxide. Agriculture 2022, 12, 1163. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W. Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal Fract. 2020, 4, 50. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W.; Wang, Q.-G.; Robust, H. Adaptive Sliding Mode Fault Tolerant Control for T-S Fuzzy Fractional Order Systems With Mismatched Disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1297–1307. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W. Adaptive sliding mode fault tolerant control for interval Type-2 fuzzy singular fractional-order systems. J. Vib. Control. 2022, 28, 465–475. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, G. Fault-tolerant output-constrained control of unknown Euler–Lagrange systems with prescribed tracking accuracy. Automatica 2020, 111, 108606. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X. Adaptive Sliding Mode Observer Design for a Class of T–S Fuzzy Descriptor Fractional Order Systems. IEEE Trans. Fuzzy Syst. 2020, 28, 1951–1960. [Google Scholar] [CrossRef]
- Macias, M.; Sierociuk, D.; Malesza, W. MEMS Accelerometer Noises Analysis Based on Triple Estimation Fractional Order Algorithm. Sensors 2022, 22, 527. [Google Scholar] [CrossRef] [PubMed]
- Karci, A. Fractional order entropy: New perspectives. Optik 2016, 127, 9172–9177. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Letter. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Costa, M.; Goldberger, A.L.; Peng, C.K. Multiscale entropy analysis of complex physiologic time series. Phys. Rev. Lett. 2007, 89, 705–708. [Google Scholar] [CrossRef]
- Wu, H.; Chen, Y.; Zhang, T.; Wang, Y. Rolling bearing fault diagnosis by improved multiscale amplitude-aware permutation entropy and random forest. Opt. Precis. Eng. 2020, 29, 621–631. (In Chinese) [Google Scholar] [CrossRef]
- Liu, D.; Xiao, Z.; Hu, X.; Zhang, C.; Malik, O.P. Feature extraction of rotor fault based on EEMD and curve code. Measurement 2019, 135, 712–724. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Correlation Coefficient | SNR = 15 | SNR = 10 | SNR = 5 |
|---|---|---|---|
| IMFWPE | 99.99% | 99.99% | 99.99% |
| IMFPE | 99.68% | 99.17% | 97.43% |
| IMPE | 98.71% | 96.64% | 92.54% |
| Diagnostic Accuracy | IMFWPE | IMFPE | IMPE | MSE |
|---|---|---|---|---|
| XGBoost | 100% | 94.93% | 93.41% | 92.61% |
| RF | 99.15% | 94.14% | 90.84% | 89.07% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Gao, Y.; Peng, S.; Zhou, D.; Wang, B. Fault Diagnosis of Hydroelectric Units Based on a Novel Multiscale Fractional-Order Weighted Permutation Entropy. Fractal Fract. 2022, 6, 588. https://doi.org/10.3390/fractalfract6100588
Zhang W, Gao Y, Peng S, Zhou D, Wang B. Fault Diagnosis of Hydroelectric Units Based on a Novel Multiscale Fractional-Order Weighted Permutation Entropy. Fractal and Fractional. 2022; 6(10):588. https://doi.org/10.3390/fractalfract6100588
Chicago/Turabian StyleZhang, Wenjing, Yuanchen Gao, Shizhe Peng, Dongdong Zhou, and Bin Wang. 2022. "Fault Diagnosis of Hydroelectric Units Based on a Novel Multiscale Fractional-Order Weighted Permutation Entropy" Fractal and Fractional 6, no. 10: 588. https://doi.org/10.3390/fractalfract6100588
APA StyleZhang, W., Gao, Y., Peng, S., Zhou, D., & Wang, B. (2022). Fault Diagnosis of Hydroelectric Units Based on a Novel Multiscale Fractional-Order Weighted Permutation Entropy. Fractal and Fractional, 6(10), 588. https://doi.org/10.3390/fractalfract6100588