


Fractal Continuum Calculus of Functions on Euler-Bernoulli Beam



Abstract
:1. Introduction
2. Mathematical Background
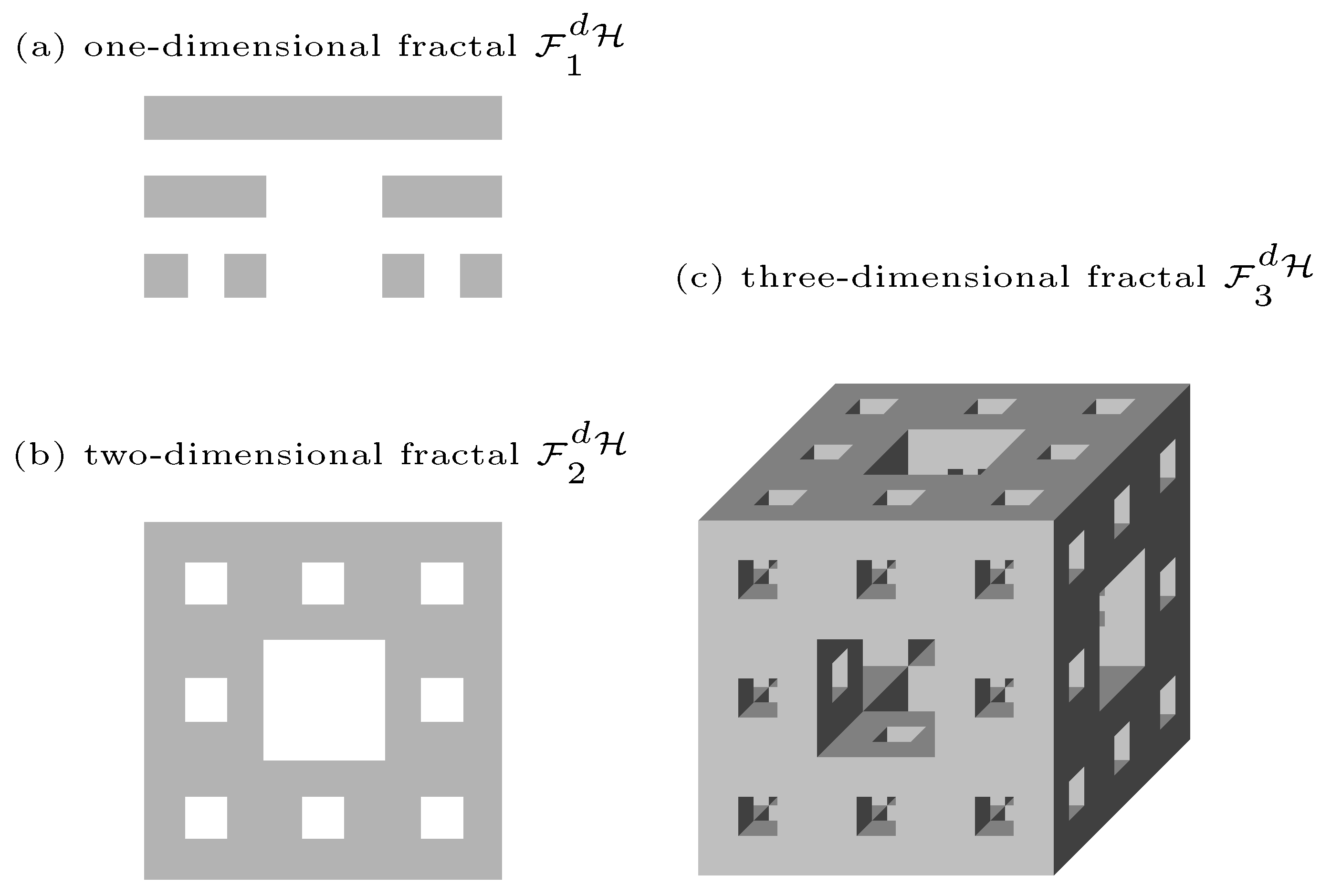
2.1. Menger Sponge Fractals
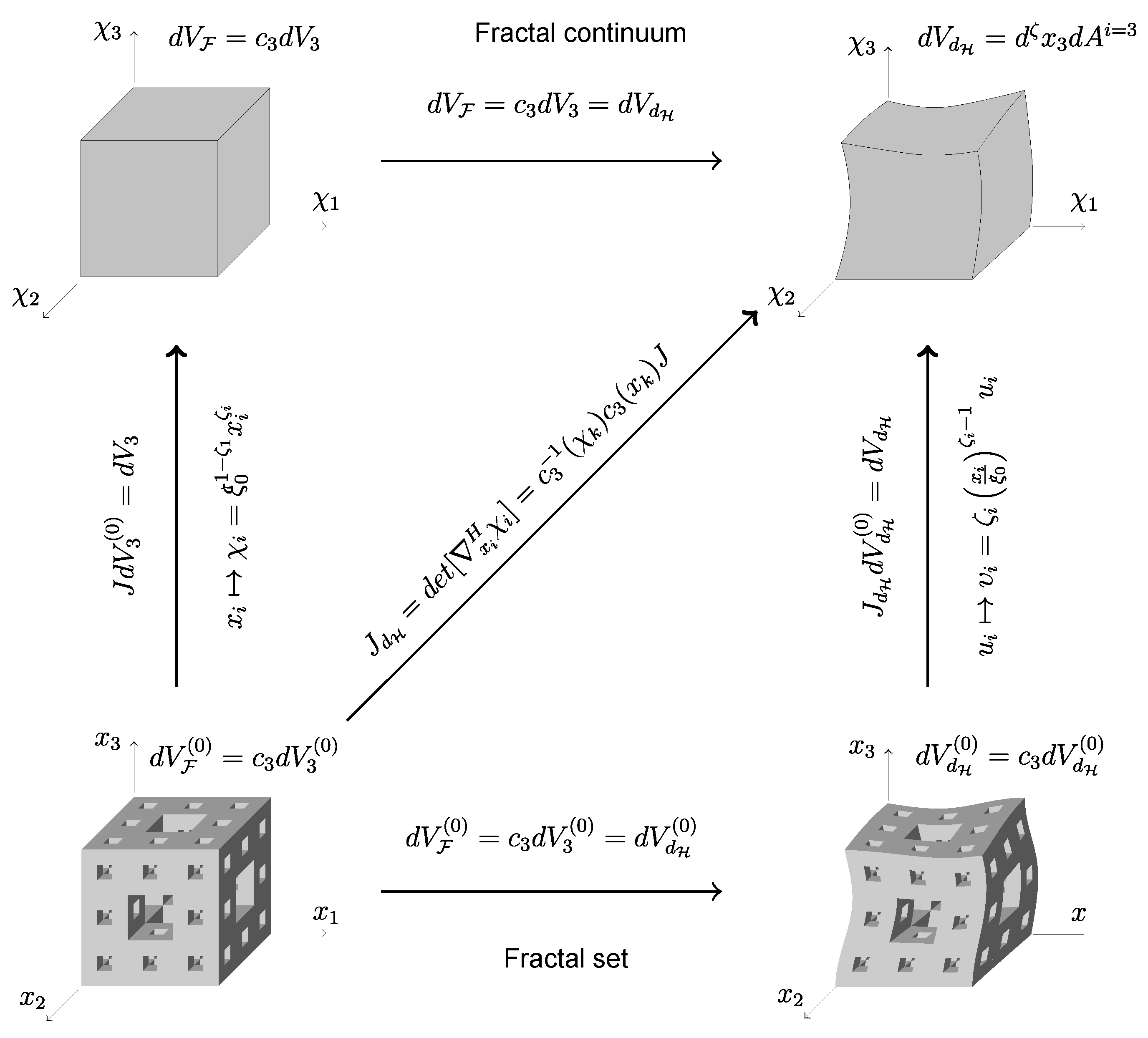
2.2. Mapping
- i
- Fractional norm is given by , being andare the fractional coordinates in fractal continuum domain allied with the Cartesian coordinates in (for ).
- ii
- Distance between two points is given by being .
- iii
- Local partial derivatives in so-called Hausdorff derivatives [28] can be expressed in terms of conventional partial derivatives () in as:where is the density of admissible states along the i-axis in .
- iv
- Hausdorff del operator in is defined as , where are basis vectors.
- v
- The divergence is given by:
- vi
- And the generalized Laplacian of scalar function is defined as:while the infinitesimal volume element in can be generally decomposed as:where and are the infinitesimal area elements on the intersection between and two-dimensional plane normal to i-axis in and in , respectively, is the density of admissible states in the plane of this intersection, and .
- vii
- The measure in the fractal continuum is defined by the following relations ∼, ∼ and ∼.
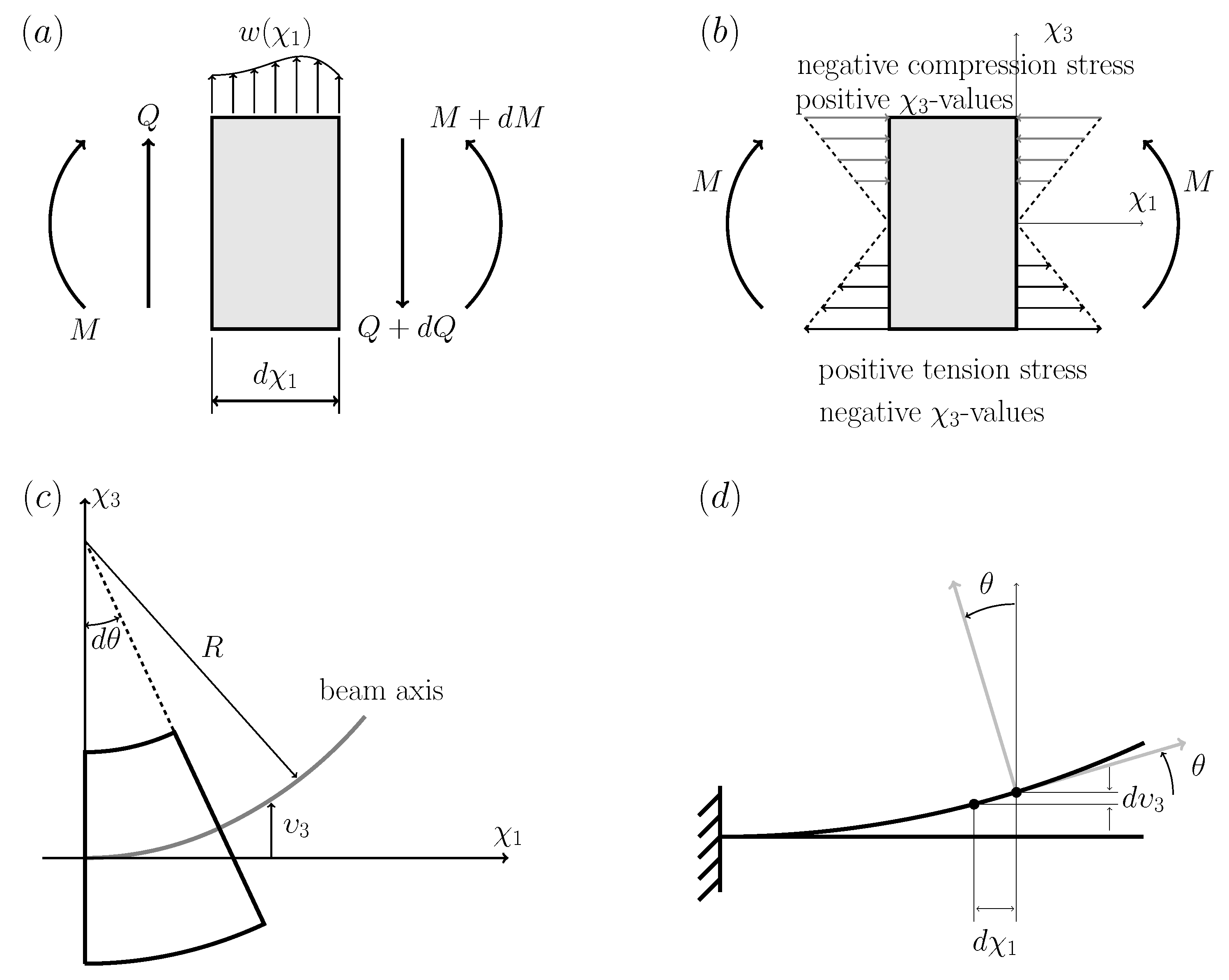
3. Differential Equations of Euler-Bernoulli Beam Using -CC
- 1.
- The cross-section is infinitely rigid in its own plane. This implies there is no deformations in the plane of the cross-section.
- 2.
- The cross-section of a beam remains plane after deformation: a transverse plane section perpendicular to the centroidal axis of the beam before deformation remains plane after bending.
- 3.
- The cross-section remains normal to the deformed axis of the beam, i.e., the cross section is perpendicular to the bent centroidal axis after bending.
4. Bending of Self-Similar Beams
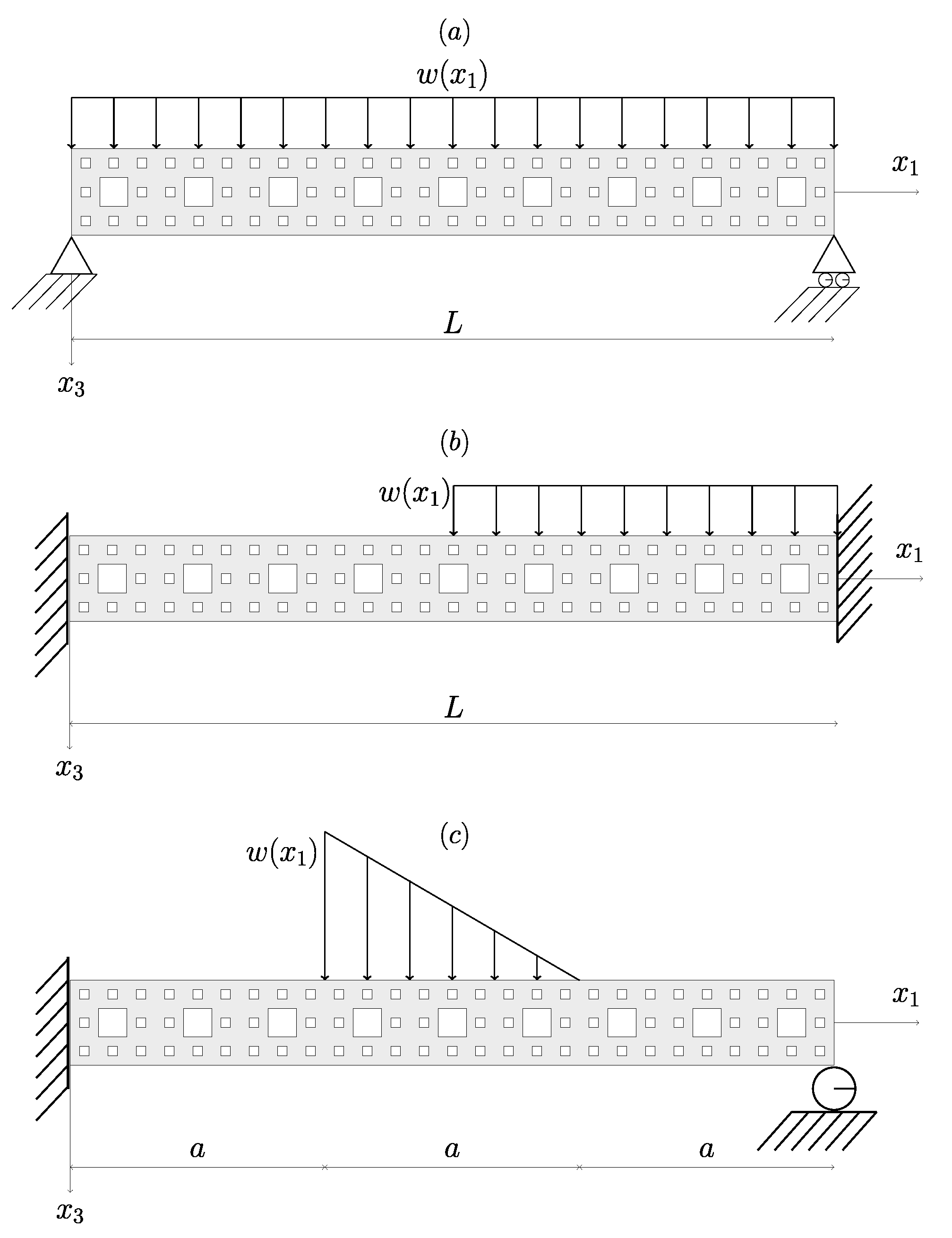
4.1. Illustrative Examples
4.2. Fractal Response Details
- for
- for
- for
- for
- for
- for
4.3. Discussion of Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Razia, B.; Tunc, O.; Hasib, K.; Haseena, G.; Aziz, K. A fractional order Zika virus model with Mittag–Leffler kernel. Chaos Solitons Fractals 2021, 146, 110898. [Google Scholar] [CrossRef]
- Khan, H.; Ahmad, F.; Tunc, O.; Idrees, M. On fractal-fractional Covid-19 mathematical model. Chaos Solitons Fractals 2022, 157, 11937. [Google Scholar] [CrossRef]
- Zhou, H.W.; Yang, S.; Idrees, M. Fractional derivative approach to non-Darcian flow in porous media. J. Hydrol. 2018, 566, 910–918. [Google Scholar] [CrossRef]
- Chang, A.; Sun, H.G.; Zhang, Y.; Zheng, C.; Min, F. Spatial fractional Darcy’s law to quantify fluid flow in natural reservoirs. Phys. A 2019, 519, 119–126. [Google Scholar] [CrossRef]
- Carpinteri, A. Fractal nature of material microstructure and size effects on apparent mechanical properties. Mech. Mater. 1994, 18, 89–101. [Google Scholar] [CrossRef]
- Shen, L.; Ostoja-Starzewski, M.; Porcu, E. Bernoulli–Euler beams with random field properties under random field loads: Fractal and Hurst effects. Arch. Appl. Mech. 2014, 84, 1595–1626. [Google Scholar] [CrossRef]
- Davey, K.; Rasgado, A. Analytical solutions for vibrating fractal composite rods and beams. Appl. Math. Model. 2011, 35, 1194–1209. [Google Scholar] [CrossRef]
- Golmankhaneh, A.; Tunc, C. Analogues to Lie Method and Noether’s Theorem in Fractal Calculus. Fractal Fract. 2019, 3, 25. [Google Scholar] [CrossRef]
- Gowrisankar, A.; Golmankhaneh, A.K.; Serpa, C. Fractal calculus on fractal interpolation functions. Fractal Fract. 2021, 5, 157. [Google Scholar] [CrossRef]
- Tunc, O.; Atan, O.; Tunc, C.; Yao, J.-C. Qualitative Analyses of Integro-Fractional Differential Equations with Caputo Derivatives and Retardations via the Lyapunov–Razumikhin Method. Axioms 2021, 10, 58. [Google Scholar] [CrossRef]
- Bohner, M.; Tunc, O.; Tunc, C. Qualitative analysis of caputo fractional integro-differential equations with constant delays. Comp. Appl. Math. 2021, 40, 214. [Google Scholar] [CrossRef]
- Parvate, A.; Seema, S.; Gangal, A.D. Calculus on fractal subsets of real line-I: Formulation. Fractals 2009, 17, 53–81. [Google Scholar] [CrossRef]
- Tarasov, B.E. Continuous medium model for fractal media. Phys. Lett. A 2005, 336, 167–174. [Google Scholar] [CrossRef]
- Tarasov, B.E. Wave equation for fractal solid string. Mod. Phys. Lett. B 2005, 19, 721–728. [Google Scholar] [CrossRef]
- Ostoja-Starzewski, M. Towards thermomechanics of fractal media. Z. Angew. Math. Phys. 2007, 58, 1085–1096. [Google Scholar] [CrossRef]
- Ostoja-Starzewski, M. Continuum mechanics models of fractal porous media: Integral relations and extremum principles. J. Mech. Mater. Struct 2009, 4, 901–912. [Google Scholar] [CrossRef]
- Ostoja-Starzewski, M. Extremum and variational principles for elastic and inelastic media with fractal geometries. Acta Mech 2009, 205, 161–170. [Google Scholar] [CrossRef]
- Li, J.; Ostoja-Starzewski, M. Fractal solids, product measures and fractional wave equations. Proc. R. Soc. A 2009, 465, 2521–2536. [Google Scholar] [CrossRef]
- Li, J.; Ostoja-Starzewski, M. Micropolar continuum mechanics of fractal media. Int. J. Eng. Sci. 2011, 249, 1302–1310. [Google Scholar] [CrossRef]
- Balankin, A.S.; Elizarraraz, B.E. Hydrodynamics of fractal continuum flow. Phys. Rev. E 2012, 85, 025302(R). [Google Scholar] [CrossRef]
- Balankin, A.S.; Elizarraraz, B.E. Map of fluid flow in fractal porous medium into fractal continuum flow. Phys. Rev. E 2012, 85, 056314. [Google Scholar] [CrossRef]
- Balankin, A.S. Stresses and strain in a deformable fractal medium and in its fractal continuum model. Phys. Lett. A 2013, 377, 2535–2541. [Google Scholar] [CrossRef]
- Balankin, A.S.; Mena, B.; Patino, J.; Morales, D. Electromagnetic fields in fractal continuum. Phys. Lett. A 2013, 377, 783–788. [Google Scholar] [CrossRef]
- Carpinteri, A.; Corneti, P.; Sapora, A.; Di Paola, M.; Zingzles, M. Fractional calculus in solid mechanics: Local versus non-local approach. Phys. Scr. 2009, 2009, 014003. [Google Scholar] [CrossRef]
- Carpinteri, A.; Corneti, P.; Sapora, A.; Di Paola, M.; Zingzles, M. Wave propagation in nonlocal elastic continua modelled by a fractional calculus approach. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 63–74. [Google Scholar] [CrossRef]
- Drapaca, C.S.; Sivaloganathan, S. A Fractional Model of Continuum Mechanics. J. Elast. 2012, 107, 105–123. [Google Scholar] [CrossRef]
- Samayoa, D.; Damián-Adame, L.; Kryvko, A. Map of a Bending Problem for Self-Similar Beams into the Fractal Continuum Using the Euler–Bernoulli Principle. Fractal Fract. 2022, 6, 230. [Google Scholar] [CrossRef]
- Balankin, A.S. A continuum framework for mechanics of fractal materials I: From fractional space to continuum with fractal metric. Eur. J. Phys. B 2015, 88, 1–13. [Google Scholar] [CrossRef]
- Ochsner, A. Classical Beam Theories of Structural Mechanics; Springer: Berlin/Heidelberg, Germany, 2021; pp. 7–64. [Google Scholar]
- Tunc, C.; Golmankhaneh, A. On stability of a class of second alpha-order fractal differential equations. AIMS Math. 2020, 5, 2126–2142. [Google Scholar] [CrossRef]
- Samayoa, D.; Ochoa-Ontiveros, L.A.; Damián-Adame, L.; Reyes de Luna, E.; Alvarez-Romero, L.; Romero-Paredes, G. Fractal model equation for spontaneous imbibition. Rev. Mex. FÍsica 2020, 66, 283–290. [Google Scholar] [CrossRef]
- Balankin, A.S.; Susarrey, O.; García, R.; Morales, L.; Samayoa, D.; López, J.A. Intrinsically anomalous roughness of admissible crack traces in concrete. Phys. Rev. E 2005, 72, 065101(R). [Google Scholar] [CrossRef]
- Ben-Avraham, D.; Havlin, S. Diffusion and Reactions in Fractal and Disordered Systems; Cambridge University Press: Cambridge, UK, 2002; pp. 21–32. [Google Scholar]
- Balankin, A.S. Fractional space approach to studies of physical phenomena on fractals and in confined low-dimensional systems. Chaos Solitons Fractals 2020, 132, 109572. [Google Scholar] [CrossRef]
- Wang, C.M.; Reddy, J.N.; Lee, K.H. Shear Deformable Beam and Plates; Elsevier: Oxford, UK, 2000; pp. 11–16. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||||||
|---|---|---|---|---|---|---|
| 3 | 2.9841 | 2.9317 | 2.9182 | 2.8634 | 2.7268 | |
| 2 | 1.9943 | 1.9746 | 1.9689 | 1.9463 | 1.8927 | |
| 1 | 0.9898 | 0.9571 | 0.9493 | 0.9171 | 0.8341 | |
| 0 | ||||||
| 2.70 | 2.58 | 2.23 | 2.16 | 1.87 | 1.30 | |
| () | 675 | 666.666 | 666.666 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samayoa, D.; Kryvko, A.; Velázquez, G.; Mollinedo, H. Fractal Continuum Calculus of Functions on Euler-Bernoulli Beam. Fractal Fract. 2022, 6, 552. https://doi.org/10.3390/fractalfract6100552
Samayoa D, Kryvko A, Velázquez G, Mollinedo H. Fractal Continuum Calculus of Functions on Euler-Bernoulli Beam. Fractal and Fractional. 2022; 6(10):552. https://doi.org/10.3390/fractalfract6100552
Chicago/Turabian StyleSamayoa, Didier, Andriy Kryvko, Gelasio Velázquez, and Helvio Mollinedo. 2022. "Fractal Continuum Calculus of Functions on Euler-Bernoulli Beam" Fractal and Fractional 6, no. 10: 552. https://doi.org/10.3390/fractalfract6100552
APA StyleSamayoa, D., Kryvko, A., Velázquez, G., & Mollinedo, H. (2022). Fractal Continuum Calculus of Functions on Euler-Bernoulli Beam. Fractal and Fractional, 6(10), 552. https://doi.org/10.3390/fractalfract6100552