
Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative


Abstract
:1. Introduction
2. Preliminaries
2.1. New Generalized Caputo FF Derivative
2.2. Orthonormal Normalized Shifted Ultraspherical Polynomials
2.3. Function Approximation
3. Different Derivatives of the Orthonormal Normalized Ultraspherical Vector
4. Tau Algorithm for FF Riccati Equation
5. Truncation Error Estimate
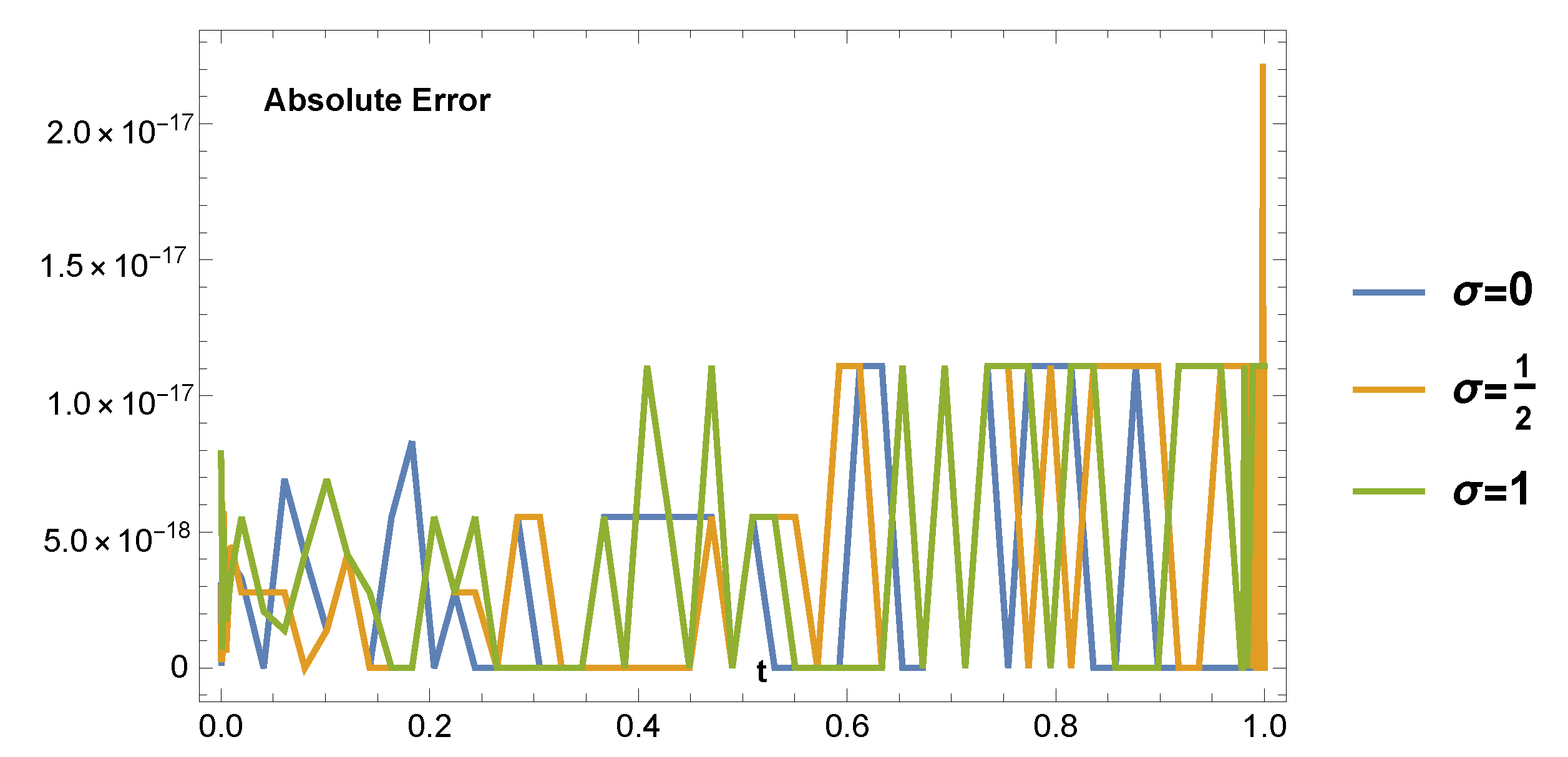
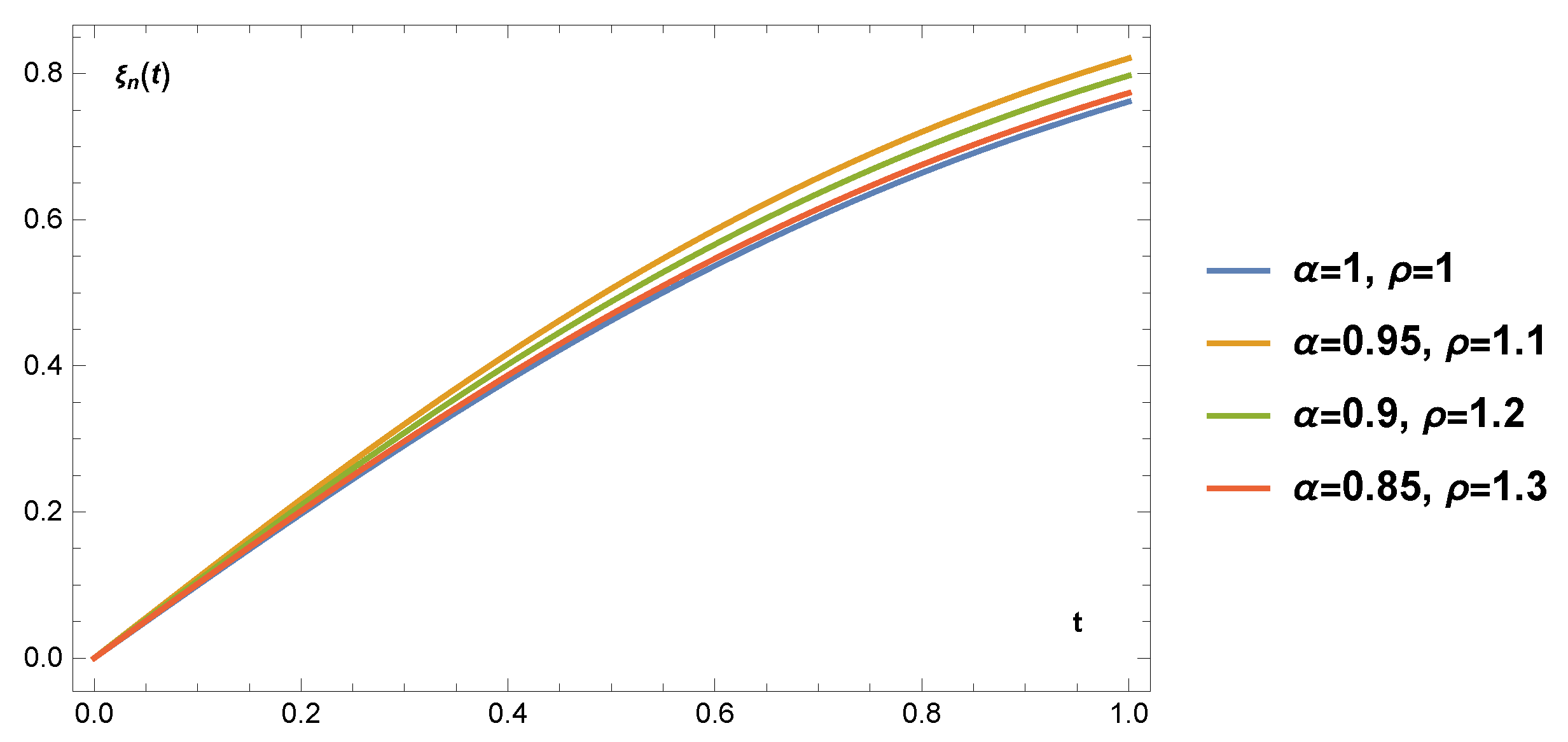
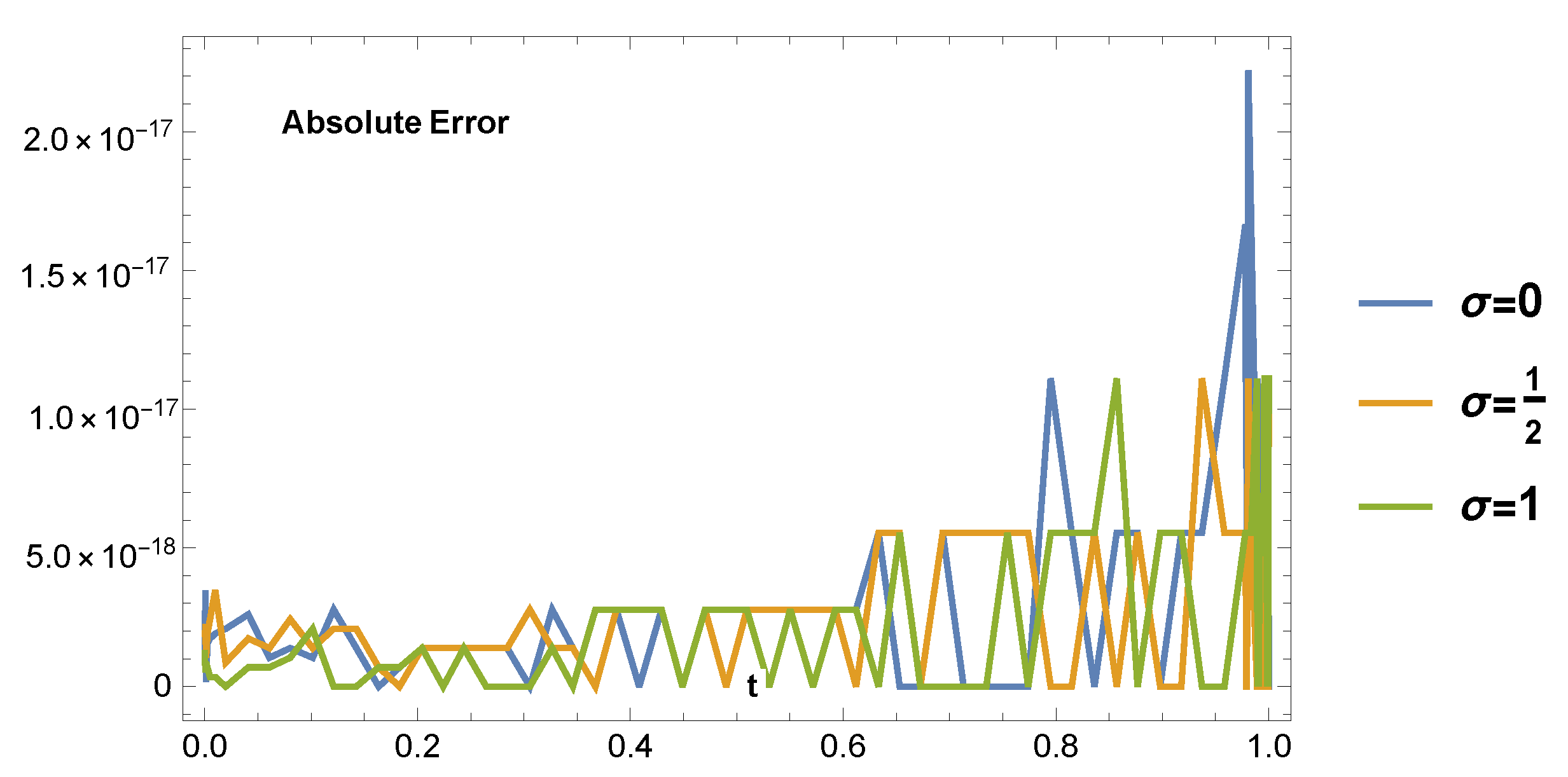
6. Test Problems
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Strikwerda, J. Finite Difference Schemes and Partial Differential Equations; SIAM: Philadelphia, PA, USA, 2004. [Google Scholar]
- Leveque, R. Finite Difference Methods for Ordinary and Partial Differential Equations: Steady-State and Time-Dependent Problems; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Ciarlet, P.G. The Finite Element Method for Elliptic Problems; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Stynes, M.; O’Riordan, E.; Gracia, J. Error analysis of a finite difference method on graded meshes for a time-fractional diffusion equation. SIAM J. Numer. Anal. 2017, 55, 1057–1079. [Google Scholar] [CrossRef]
- Deng, W. Finite element method for the space and time fractional Fokker–Planck equation. SIAM J. Numer. Anal. 2009, 47, 204–226. [Google Scholar] [CrossRef]
- Hesthaven, J.; Gottlieb, S.; Gottlieb, D. Spectral Methods for Time-Dependent Problems; Cambridge University Press: Cambridge, UK, 2007; Volume 21. [Google Scholar]
- Shen, J.; Tang, T.; Wang, L.L. Spectral Methods: Algorithms, Analysis and Applications; Springer Science & Business Media: Hoboken, NJ, USA, 2011; Volume 41. [Google Scholar]
- Sheng, C.; Cao, D.; Shen, J. Efficient spectral methods for PDEs with spectral fractional Laplacian. J. Sci. Comput. 2021, 88, 4. [Google Scholar] [CrossRef]
- Atta, A.; Abd-Elhameed, W.; Moatimid, G.; Youssri, Y. Shifted fifth-kind Chebyshev Galerkin treatment for linear hyperbolic first-order partial differential equations. Appl. Numer. Math. 2021, 167, 237–256. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Machado, J.A.T.; Youssri, Y.H. Hypergeometric fractional derivatives formula of shifted Chebyshev polynomials: Tau algorithm for a type of fractional delay differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2021. [Google Scholar] [CrossRef]
- Lui, S.; Nataj, S. Spectral collocation in space and time for linear PDEs. J. Comput. Phys. 2021, 424, 109843. [Google Scholar] [CrossRef]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Thomas, A., Jr. Spectral Methods in Fluid Dynamics; Springer Science & Business Media: Hoboken, NJ, USA, 2012. [Google Scholar]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Zang, T. Spectral Methods: Fundamentals in Single Domains; Springer Science & Business Media: Hoboken, NJ, USA, 2007. [Google Scholar]
- Faheem, M.; Raza, A.; Khan, A. Collocation methods based on Gegenbauer and Bernoulli wavelets for solving neutral delay differential equations. Math. Comput. Simul. 2021, 180, 72–92. [Google Scholar] [CrossRef]
- Usman, M.; Hamid, M.; Zubair, T.; Haq, R.; Wang, W.; Liu, M. Novel operational matrices-based method for solving fractional-order delay differential equations via shifted Gegenbauer polynomials. Appl. Math. Comput. 2020, 372, 124985. [Google Scholar] [CrossRef]
- Taghian, H.; Abd-Elhameed, W.; Moatimid, G.; Youssri, Y. Shifted Gegenbauer—Galerkin algorithm for hyperbolic telegraph type equation. Int. J. Mod. Phys. C 2021, 2150118. [Google Scholar] [CrossRef]
- Dahy, S.; Elgindy, K. High-order numerical solution of viscous Burgers’ equation using an extended Cole–Hopf barycentric Gegenbauer integral pseudospectral method. Int. J. Comput. Math. 2021. [Google Scholar] [CrossRef]
- Elgindy, K.; Refat, H. High-order Gegenbauer integral spectral element method integrated with an adaptive Chebyshev optimization strategy for solving linear singularly perturbed differential equations. J. Comput. Appl. Math. 2020, 372, 112722. [Google Scholar] [CrossRef]
- Shloof, A.; Senu, N.; Ahmadian, A.; Salahshour, S. An efficient operation matrix method for solving fractal–fractional differential equations with generalized Caputo-type fractional–fractal derivative. Math. Comput. Simul. 2021, 188, 415–435. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F. Fractional calculus. In Fractals and Fractional Calculus in Continuum Mechanics; Springer: Berlin/Heidelberg, Germany, 1997; pp. 223–276. [Google Scholar]
- Li, C.; Zeng, F. Numerical Methods for Fractional Calculus; Chapman and Hall/CRC: London, UK, 2019. [Google Scholar]
- Sakar, M.; Akgül, A.; Baleanu, D. On solutions of fractional Riccati differential equations. Adv. Differ. Equ. 2017, 2017, 39. [Google Scholar] [CrossRef]
- Odibat, Z.; Baleanu, D. Numerical simulation of initial value problems with generalized Caputo-type fractional derivatives. Appl. Numer. Math. 2020, 156, 94–105. [Google Scholar] [CrossRef]
- Hafez, R.; Youssri, Y. Shifted Gegenbauer–Gauss collocation method for solving fractional neutral functional-differential equations with proportional delays. Kragujev. J. Math. 2022, 46, 2022. [Google Scholar]
- Carlitz, L. The product of two ultraspherical polynomials. Glasg. Math. J. 1961, 5, 76–79. [Google Scholar] [CrossRef] [Green Version]
- Abd-Elhameed, W.M.; Youssri, Y.; Doha, E.H. New solutions for singular Lane-Emden equations arising in astrophysics based on shifted ultraspherical operational matrices of derivatives. Comput. Methods Differ. Equ. 2014, 2, 171–185. [Google Scholar]
- Haq, E.; Ali, M.; Khan, A. On the solution of fractional Riccati differential equations with variation of parameters method. Eng. Appl. Sci. Lett. 2020, 3, 41. [Google Scholar]
- Odibat, Z.; Momani, S. Modified homotopy perturbation method: Application to quadratic Riccati differential equation of fractional order. Chaos Solitons Fractals 2008, 36, 167–174. [Google Scholar] [CrossRef]
- Saratha, S.; Bagyalakshmi, M.; Krishnan, G. Fractional generalised homotopy analysis method for solving nonlinear fractional differential equations. Comput. Appl. Math. 2020, 39, 112. [Google Scholar] [CrossRef]
- Batiha, B.; Noorani, M.; Hashim, I. Application of variational iteration method to a general Riccati equation. Int. Math. Forum 2007, 56, 2759–2770. [Google Scholar] [CrossRef] [Green Version]
- Riccati, H.; Mabood, F.; Izani, A.; Isami, M.; Hashim, I. Application of optimal homotopy asymptotic method for the approximate solution of Riccati equation. Sains Malays. 2013, 42, 863–867. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| t | [19] | [22] | Exact | |||
|---|---|---|---|---|---|---|
| 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.2 | 0.2342826045 | 0.2342826056 | 0.2342826071 | 0.2342826056 | 0.260941 | 0.1973753203 |
| 0.4 | 0.4181001627 | 0.4181001633 | 0.4181001623 | 0.4181001633 | 0.442638 | 0.3799489622 |
| 0.6 | 0.5505899501 | 0.5505899500 | 0.5505899500 | 0.5505899500 | 0.577781 | 0.5370495670 |
| 0.8 | 0.6624900000 | 0.6624900000 | 0.6624900000 | 0.6624900000 | 0.676930 | 0.6640367702 |
| CPU Time | - | - | - |
| t | Exact | [19] | [28] | [29] | [27] | ||
|---|---|---|---|---|---|---|---|
| 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.2 | 0.1973753203 | 0.1973753203 | 0.1973753203 | 0.1973753203 | 0.197375 | 0.1973753092 | 0.1973753160 |
| 0.4 | 0.3799489622 | 0.3799489622 | 0.3799489622 | 0.3799489624 | 0.379944 | 0.3799435784 | 0.3799469862 |
| 0.6 | 0.5370495670 | 0.5370495670 | 0.5370495670 | 0.5370495668 | 0.536857 | 0.5368572343 | 0.5369833784 |
| 0.8 | 0.6640367702 | 0.6640367702 | 0.6640367702 | 0.6640367701 | 0.661706 | 0.6617060368 | 0.6633009217 |
| 1.0 | 0.7615941558 | 0.7615941557 | 0.7615941557 | 0.7615941550 | 0.746032 | 0.746031746 | 0.7571662667 |
| t | [30] | [31] | [28] | [22] | |||
|---|---|---|---|---|---|---|---|
| 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.2 | 2.36 × | 2.10 × | 1.24 × | 1.03 × | 2.90 × | 1.20 × | 9.23 × |
| 0.4 | 2.24 × | 2.22 × | 2.21 × | 3.33 × | 2.50 × | 3.03 × | 7.35 × |
| 0.6 | 4.37 × | 5.37 × | 3.27 × | 9.98 × | 5.50 × | 4.69 × | 7.56 × |
| 0.8 | 5.63 × | 4.69 × | 5.91 × | 1.54 × | 3.80 × | 1.88 × | 3.94 × |
| 1.0 | 2.35 × | 3.62 × | 6.28 × | 3.47 × | 3.40 × | 3.43 × | 7.12 × |
| n | |||
|---|---|---|---|
| 6 | 3.28 × | 6.97 × | 3.57 × |
| 10 | 4.42 × | 6.38 × | 7.29 × |
| 14 | 3.69 × | 3.57 × | 6.82 × |
| 18 | 2.22 × | 2.22 × | 2.22 × |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Youssri, Y.H. Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative. Fractal Fract. 2021, 5, 100. https://doi.org/10.3390/fractalfract5030100
Youssri YH. Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative. Fractal and Fractional. 2021; 5(3):100. https://doi.org/10.3390/fractalfract5030100
Chicago/Turabian StyleYoussri, Youssri Hassan. 2021. "Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative" Fractal and Fractional 5, no. 3: 100. https://doi.org/10.3390/fractalfract5030100
APA StyleYoussri, Y. H. (2021). Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative. Fractal and Fractional, 5(3), 100. https://doi.org/10.3390/fractalfract5030100