1. Introduction
The class of Langevin differential equations (LDEs) is considered indifferently in the assessment of different categories of geometric investigations. The partial group is considered by consuming the cramped geometries [
1]. It is termed the evolution of physical events in fluctuating situations [
2,
3,
4]. For instance, Brownian motion is fit selected by the LDEs while the arbitrary fluctuation force is reflected to be white noise. In the sample, the random fluctuation force is not white noise, the motion of the particle is adapted by the improved LDEs [
5]. A fractional type of LDEs is considered in [
6,
7,
8,
9]. Additionally, the solvability of LDEs is demonstrated by proposing the geometric ergodic and other geometry in [
10,
11]. Generally, the class of LDEs is employed to design the broader classes of polymer field theory models. One of significant investigation in the area of polymer theory, systems is the geometric representation of the polymer. Therefore, we focus the geometric analytic univalent results of LDEs with a complex variable [
12].
In this analysis, we investigate the upper bound result of a class of complex Langevin differential equations (LDEs) in the aim of fractal theory. The result is an analytic univalent solution in the open unit disk. The method of the proof is assumed by employing a type of fractal function constructed by the subordination notion. The fractal functions are suggested for the multi-parametric coefficients type motorboat fractal set.
2. Methods
A class of second order LDEs is formulated by the structure [
13]
where
presents the damping connection and
S is the noise term. To investigate the geometric properties of Equation (
1), we assume that
and
is a normalized function achieving the series
. We reorganize Equation (
1) with complex connection, then we obtain the homogeneous equation
where
is analytic function in ∪. Obviously,
for all
(see the following instruction).
Example 1.
Suppose that which implies;
Consider which yields ;
Assume that and which brings ;
Suppose that and which yields .
Moreover, we consider the following concepts.
Definition 2.
A function φ, which is analytic in ∪, is subordinated to the holomorphic function χ, denoted by , if an analytic function ϖ with exists, having [14]. The classes and of starlike and convex functions, respectively, are satisfied and where .
The class contains functions of the formwhere ϖ is the Schwarz function and . Then is the class of Janowski functions.
The is used to construct the class in Definition 3.
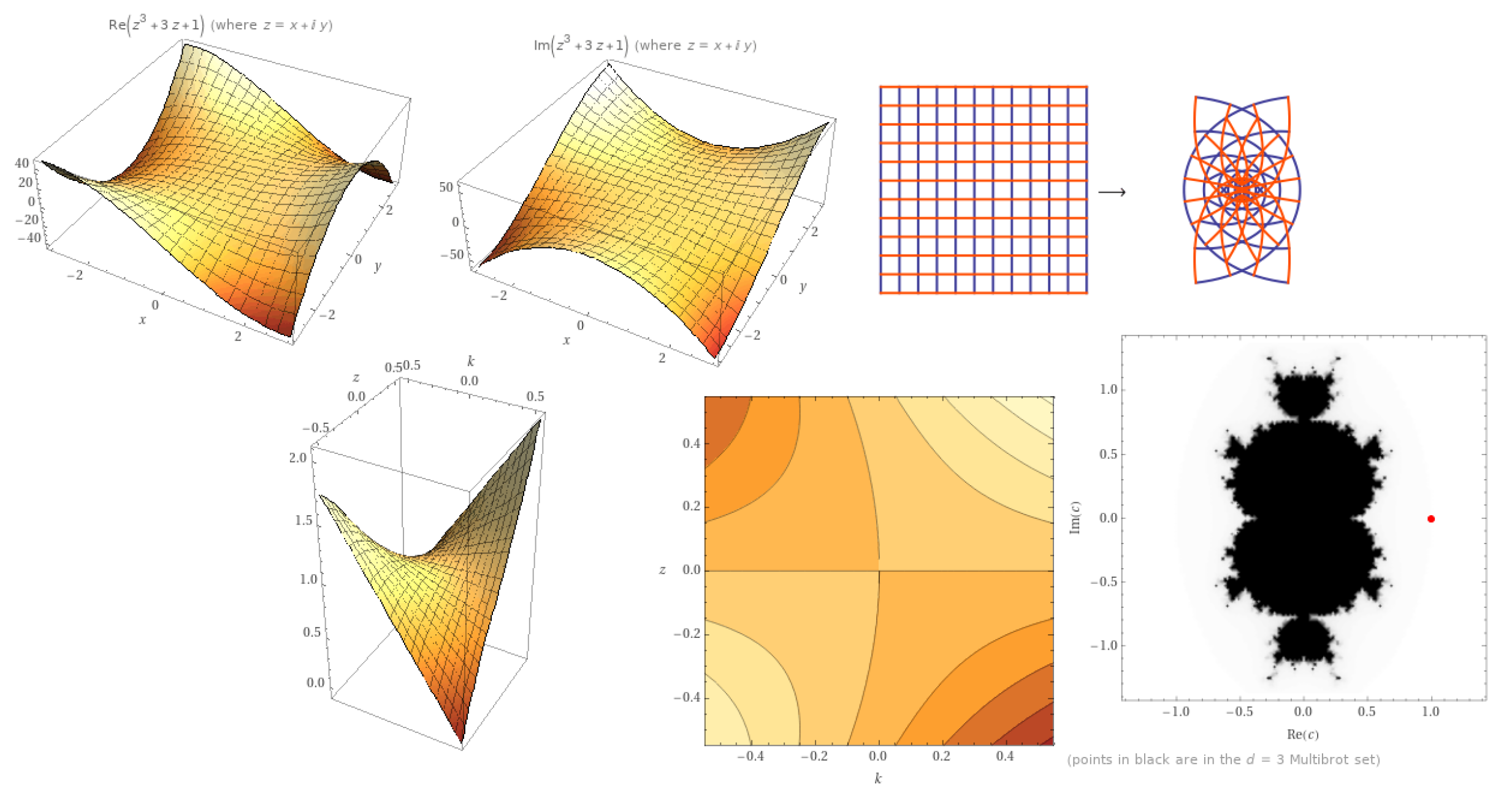
Definition 3. For the normalized analytic functionthe class is a set of all functions of the form (2)where is analytic in . Multibrot Fractal Set Generator
A multibrot set in the complex plane satisfies that the absolute value remains a finite value, taking the formula
where
are constant coefficients. Additionally, a multibrot set
Figure 1 is presented by parametric connections such as the full cubic connected locus, which maps the complex number
into
(see [
15]).
Define a function with the parameter
, taking the construction
Furthermore, a computation implies that
whenever
3. Results
In this section, we illustrate our computational results by utilizing the function .
Proposition 4. Let Define the functions , and Ifholds thenwhere and ;
;
.
Proof. Step (i): let .
Define a function
with the formula
Clearly, for the analytic function
with
we have
Define a function
which is starlike in ∪ (see [
16]). Therefore, for
we get
Thus, Miller–Mocanu Lemma (see [
14], p. 132) admits that
To finish this conversation, we must show that
under the necessary condition
or
such that
Moreover,
whenever
and
Hence, we obtain
whenever
Finally, we have that
when
which is provided
This implies the relations
Step (ii): assume that .
Define a function
by
Obviously, the analytic function
achieves
and
By considering
, which is starlike in ∪ and
we attain
Thus, the Miller–Mocanu Lemma yields
Proceeding, we have the following inequality
when
or
. In addition, we have
provided that for
, the inequality
holds. Thus, for
, we get
when
This yields the following subordination
Step (iii): Let then we obtain the following construction.
Define a function
formulated by the design
Clearly, for the analytic function
we have that
and
By considering the functions
, which is starlike in ∪ and
we receive
Hence, the Miller-Mocanu Lemma yields
Accordingly, for
or
, we obtain
Moreover, the subordination
when
such that
Thus, for
, we have
Consequently, this implies that
□
Proposition 4 can be generalized by assuming an analytic function such that . The proof is similar to the proof of Proposition 4; therefore, we omit it.
Proposition 5. Let (the set of analytic functions in the open unit disk) such that and letwhere κ is a real parameter. If one of the differential inequalities holdthen In the next result, we consider two different parameters and .
Proposition 6. Consider such thatwhere and . Thenwhen such that ;
;
.
Proof. Step (i): suppose that .
Define an analytic function
constructed as follows:
Thus, we obtain
and
Define a function
which is starlike in ∪ (see [
16]). Therefore, for
we get
Thus, Miller–Mocanu Lemma (see [
14], p. 132) admits that
To finish this conversation, we must show that
under the necessary condition
or
such that
Moreover,
whenever
and
. Hence, we obtain
whenever
. Finally, we have that
when
which is provided
Hence, we have
Step (ii): put .
Define an analytic function
formulating by the structure
Obviously,
is satisfying
and
By considering
, which is starlike in ∪ and
we attain
Thus, Miller-Mocanu Lemma implies
Proceeding, the following inequality indicates
if
or
. In addition, we have
provided that for
the inequality
holds. Thus, we have
when
satisfying
This leads to the following subordination
Step (iii): consume that .
Define a function
formulating by the design
Clearly,
and
By considering the functions
, which is starlike in ∪ and
we receive
Hence, the Miller-Mocanu Lemma implies
Accordingly, for
or
, we obtain
Moreover, the subordination
when
such that
Thus, if
then we have
Consequently, this implies that
□
Proposition 6 can be extended by consuming an analytic function such that The proof is similar to the proof of Proposition 4; therefore, we omit it.
Proposition 7. Let such that and letwhere κ is a real parameter. If one of the differential inequalities holdsthen We proceed to consider three parameters and . We obtain the following result:
Proposition 8. Let the function designing the inequalitywhere and . Thenwhen such that
Proof. Step (i): let .
Define an analytic function
by
Clearly,
and
Define a function
which is starlike in ∪ (see [
16]). Therefore, for
we get
Thus, Miller–Mocanu Lemma implies
It is clear that
under the necessary condition
or
such that
and
whenever
and
. Hence, we obtain
whenever
Finally, we have that
when
which is provided
Which implies that
Step (ii): consider .
Define an analytic function
by
Obviously,
and
By considering
, which is starlike in ∪ and
, we attain
Thus, Miller–Mocanu Lemma implies
Proceeding, the following inequality holds when
,
In addition, we have
whenever
holds. Thus, we have
when
satisfying
Consequently, we have the following subordination
Step(iii): put .
Define an analytic function
by
Clearly,
and
By considering the functions
, which is starlike in ∪ and
we receive
Hence, the Miller–Mocanu Lemma yields
Accordingly, for
or
, we obtain
Moreover, the subordination
when
such that
Thus, if
then we have
Consequently, this implies that
□
Proposition 8 can be generalized by assuming an analytic function such that The proof is similar to the proof of Proposition 8; therefore, we omit it.
Proposition 9. Let such that and letwhere κ is a real parameter. If one of the differential inequalities holdsthen More generalization can be suggested by assuming four parameters and m such that Then, we obtain the next extended result. The proof is omitted.
Proposition 10. Let such that and letwhere κ is a real parameter. If one of the differential inequalities holdthenwhere satisfying for all .
In the next result, we study the conditions for four parameters and such that .
Proposition 11. Let such that and letwhere κ is a real parameter. If one of the differential inequalities holdsthenwhere for all satisfying Example 12. Consider the function which satisfies the subordinationthen for and , Proposition 10 yields for and the subordinationOr by using Proposition 11, where we have the subordinationThe above example shows the sufficient conditions for a function to have a fractal domain using the multibrot function . Consequently, the LDEs can be considered such that . 4. Conclusions
A discussion of a style of Langevin differential equations (LDEs) of complex variables is studied in the statement of geometric function theory. This class of LDEs is a generalization of the well known class given in [
16,
17]. We organized a class of normalized functions relating the formation of LDEs. By the subordination inequality, we figured the upper bound determination of a class of fractal functions holding multibrot function
. Moreover, we illustrated the extended results based on the class
(
when
). As present determinations in this method, one can consider Equation (
3) in terminologies of differential operators such as fractional differential and convolution operators in the open unit disk. On the other hand, one can commend a quantum calculus.
Author Contributions
Conceptualization, R.W.I. and D.B.; methodology, D.B.; software, R.W.I.; validation, R.W.I. and D.B.; formal analysis, D.B.; investigation, R.W.I. Both authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the respected reviewers for their kind comments and the editorial office for their advice.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| LDE | Langevin differential equation |
References
- Nadler, B.; Schuss, Z.; Singer, A.; Eisenberg, R.S. Eisenberg. Ionic diffusion through confined geometries: From Langevin equations to partial differential equations. J. Phys. Condens. Matter 2004, 16, S2153. [Google Scholar] [CrossRef]
- Wax, N. (Ed.) Selected Papers on Noise and Stochastic Processes; Courier Dover Publications: New York, NY, USA, 1954. [Google Scholar]
- Mazo, R. Brownian Motion: Fluctuations, Dynamics and Applications; Oxford University Press: Oxford, UK, 2002. [Google Scholar]
- Coffey, W.T.; Kalmykov, Y.P.; Waldron, J.T. The Langevin Equation, 2nd ed.; World Scientific: Singapore, 2004. [Google Scholar]
- Zwanzig, R. Non Equilibrium Statistical Mechanics; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Jeon, J.-H.; Metzler, R. Fractional Brownian motion and motion governed by the fractional Langevin equation in confined geometries. Phys. Rev. E 2010, 8, 021103. [Google Scholar] [CrossRef] [PubMed]
- Ahmadova, A.; Mahmudov, N.I. Langevin differential equations with general fractional orders and their applications to electric circuit theory. J. Comput. Appl. Math. 2021, 388, 113299. [Google Scholar] [CrossRef]
- Mahmudov, N.I.; Huseynov, I.T.; Aliev, N.A.; Aliev, F.A. Analytical approach to a class of Bagley-Torvik equations. TWMS J. Pure Appl. Math. 2020, 11, 238–258. [Google Scholar]
- Ibrahim, R.W.; Harikrishnan, S.; Kanagarajan, K. Existence and stability of Langevin equations with two Hilfer-Katugampola fractional derivatives. Stud. Univ. Babes-Bolyai Math. 2018, 63, 291–302. [Google Scholar] [CrossRef]
- Feng, C.; Zhao, H.; Zhong, J. Existence of geometric ergodic periodic measures of stochastic differential equations. arXiv 2019, arXiv:1904.08091. [Google Scholar]
- Thieu, T.K.; Muntean, A. Solvability of a coupled nonlinear system of Skorohod-like stochastic differential equations modeling active–passive pedestrians dynamics through a heterogeneous domain and fire. arXiv 2020, arXiv:2006.00232. [Google Scholar]
- Lennon, E.M.; Mohler, G.O.; Ceniceros, H.D.; García-Cervera, C.J.; Fredrickson, G.H. Numerical solutions of the complex Langevin equations in polymer field theory. Multiscale Model. Simul. 2008, 6, 1347–1370. [Google Scholar] [CrossRef]
- Vanden-Eijnden, E.; Ciccotti, G. Second-order integrators for Langevin equations with holonomic constraints. Chem. Phys. Lett. 2006, 429, 310–316. [Google Scholar] [CrossRef]
- Miller, S.S.; Mocanu, P.T. Differential Subordinations: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Popa, B. Iterative function systems for natural image processing. In Proceedings of the IEEE 2015 16th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 27–30 May 2015; pp. 46–49. [Google Scholar]
- Wani, L.A.; Swaminathan, A. Differential Subordinations for Starlike Functions Associated with A Nephroid Domain. arXiv 2019, arXiv:1912.06326. [Google Scholar]
- Lee, S.K.; Ravichandran, V.; Supramaniam, S. Initial coefficients of biunivalent functions. Abstr. Appl. Anal. 2014, 2014, 640856. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
