
Vocational Training in Virtual Reality: A Case Study Using the 4C/ID Model


Abstract
:1. Introduction
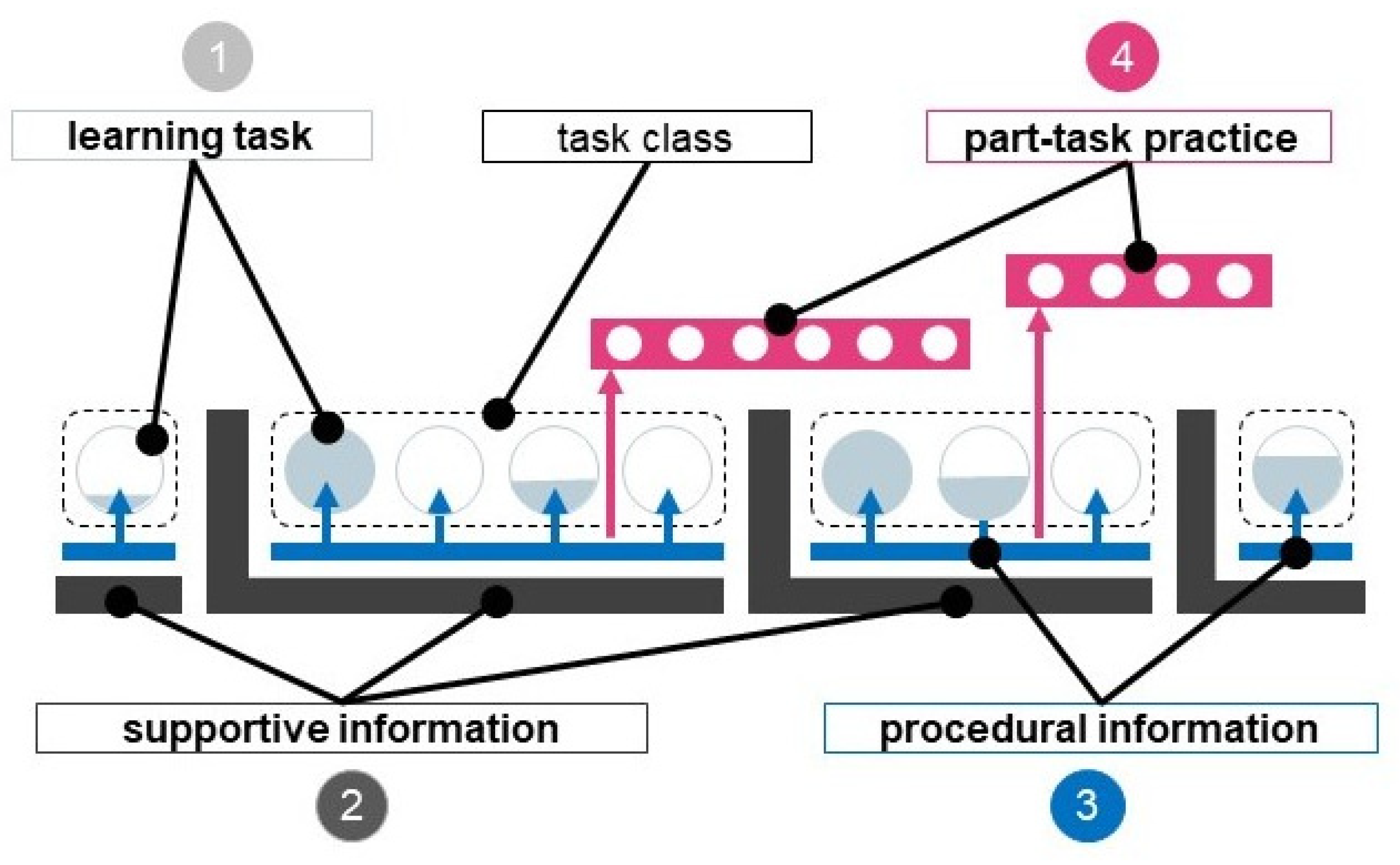
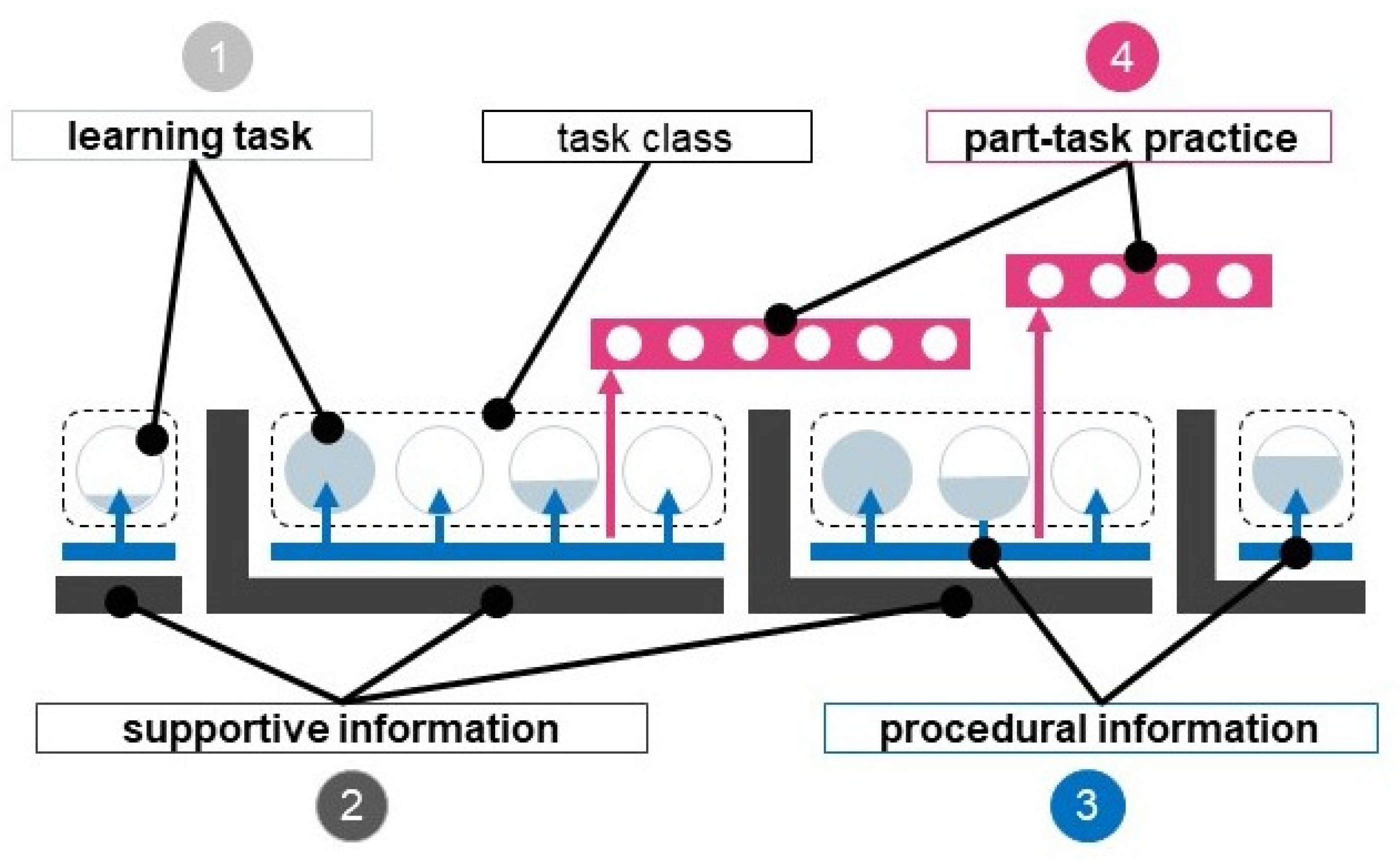
2. Theoretical Background: The Four-Component Instructional Design Model
3. Design Process
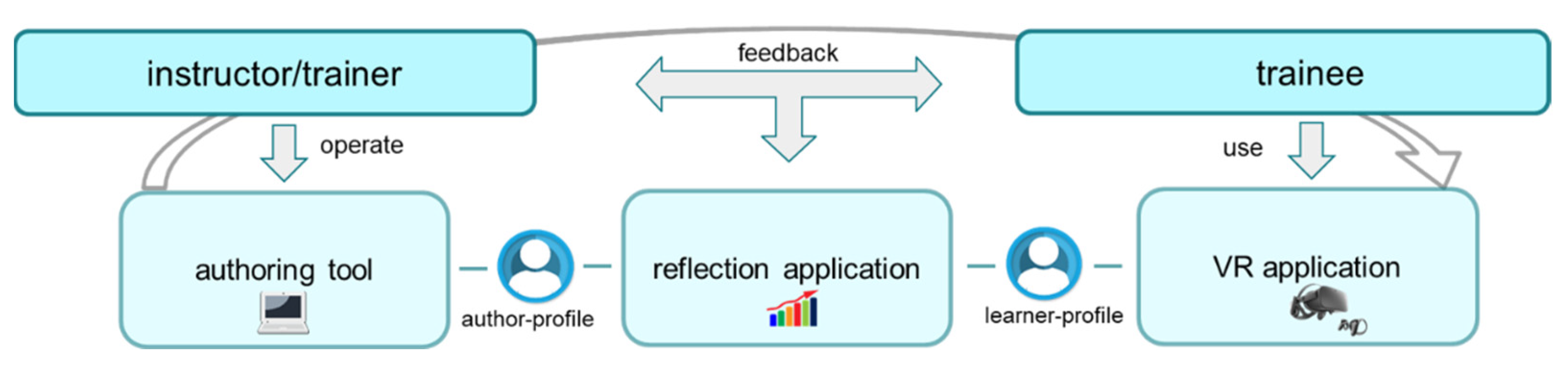
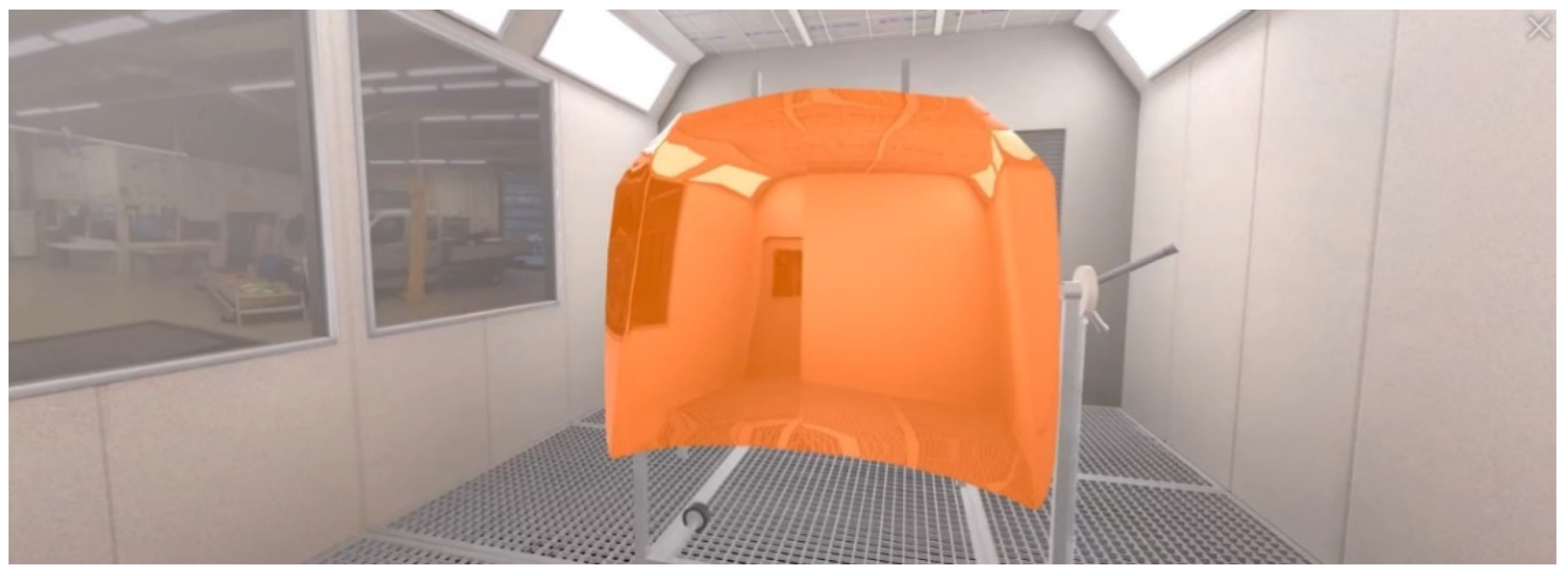
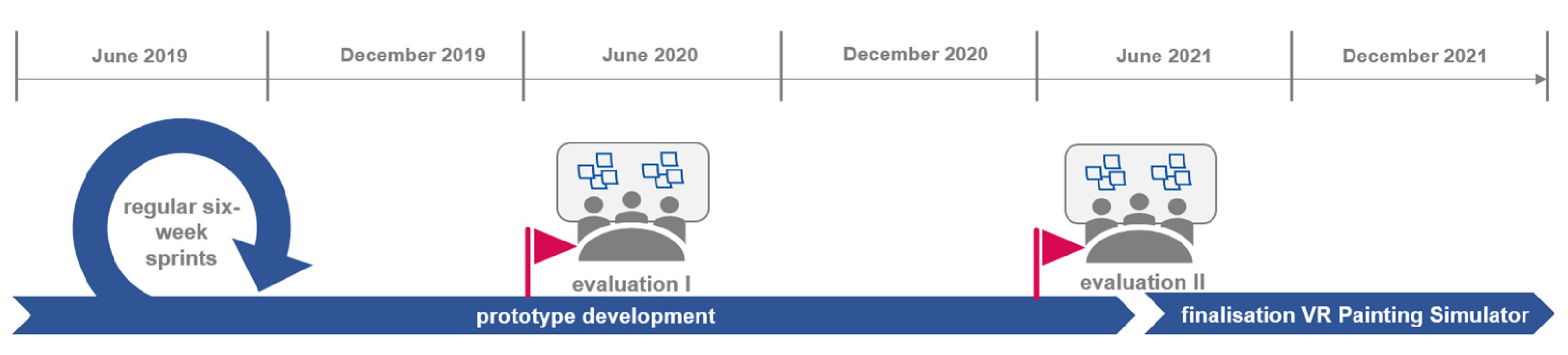
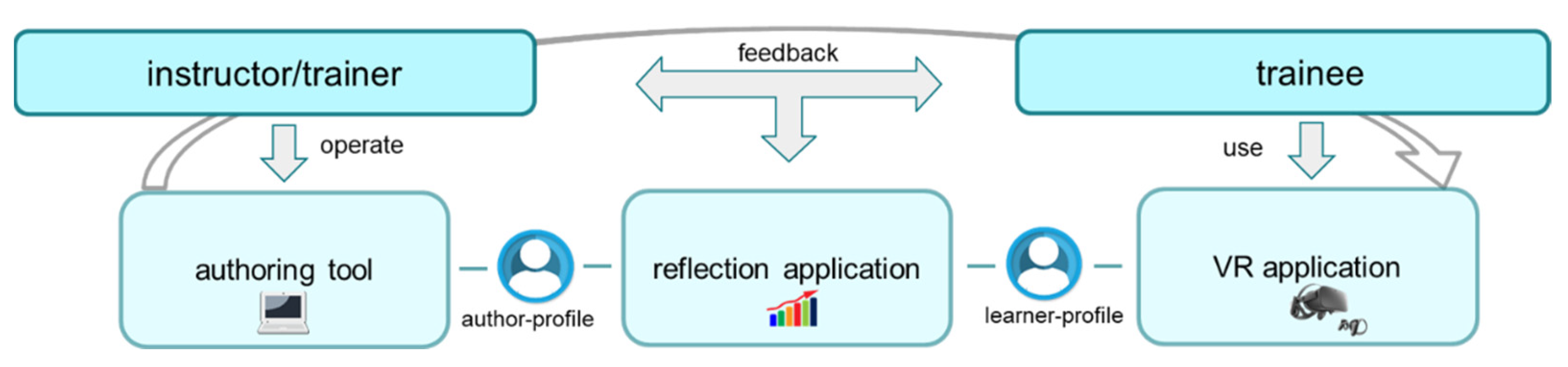
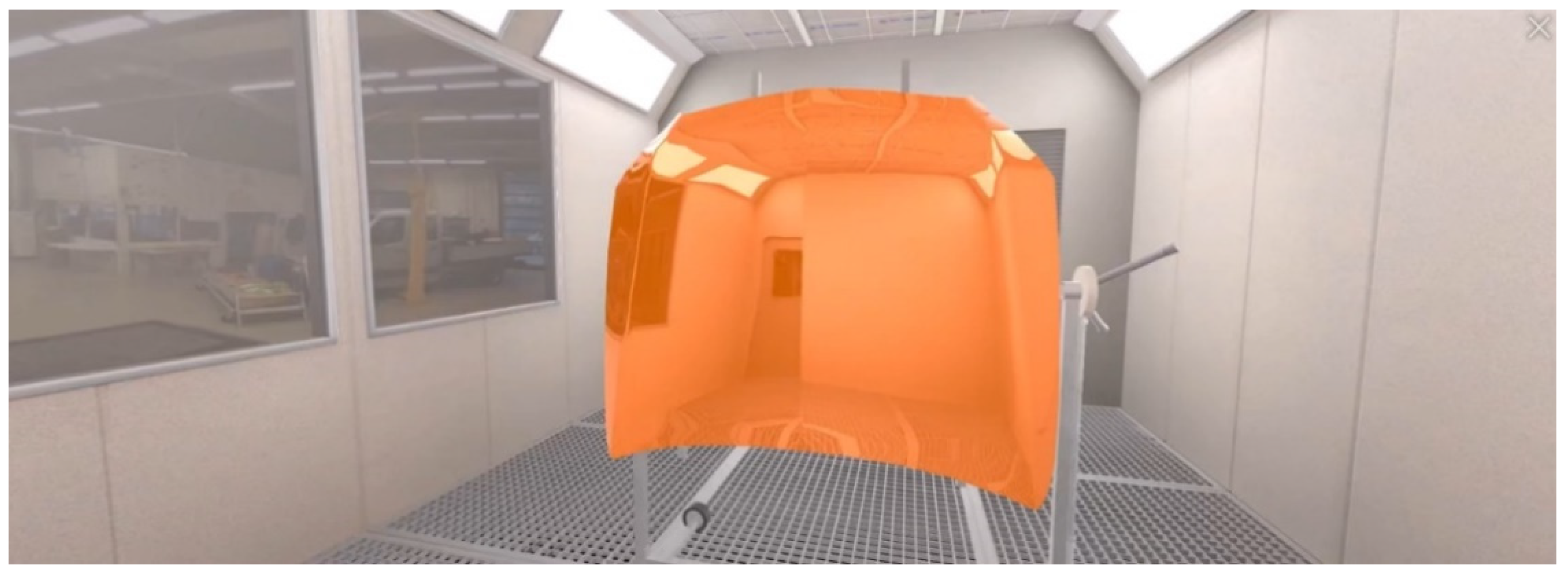
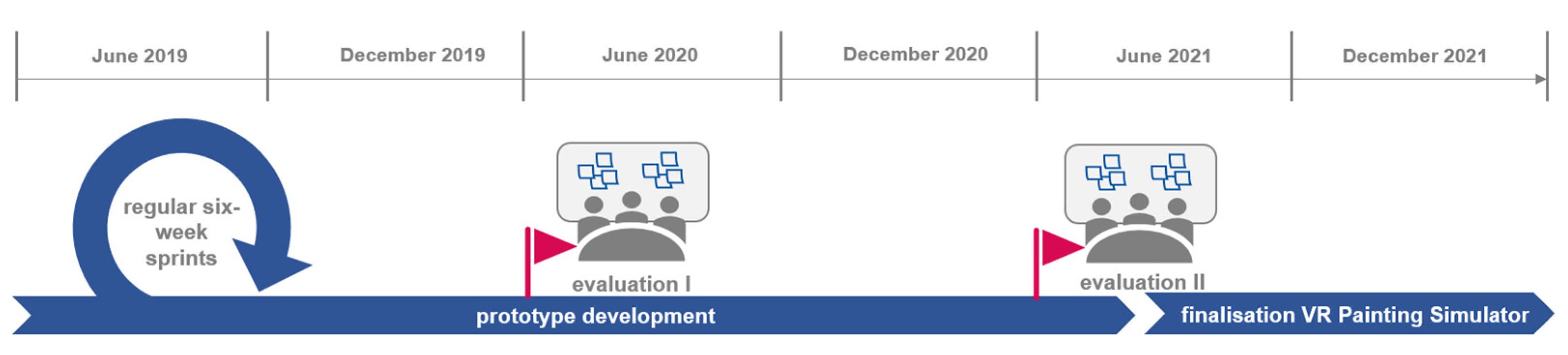
3.1. Characteristics of the HandLeVR Project
3.2. Design Steps along with the 4C/ID Model
4. Conclusions
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stoof, A.; Martens, R.L.; Van Merrienboer, J.J.; Bastiaens, T.J. The boundary approach of competence: A constructivist aid for understanding and using the concept of competence. Hum. Resour. Dev. Rev. 2002, 1, 345–365. [Google Scholar] [CrossRef]
- Gulikers, J.T.; Bastiaens, T.J.; Kirschner, P.A. A five-dimensional framework for authentic assessment. Educ. Technol. Res. Dev. 2004, 52, 67–86. [Google Scholar] [CrossRef] [Green Version]
- Allcoat, D.; von Mühlenen, A. Learning in virtual reality: Effects on performance, emotion and engagement. Res. Learn. Technol. 2018, 26, 2140. [Google Scholar] [CrossRef] [Green Version]
- Hamilton, D.; McKechnie, J.; Edgerton, E.; Wilson, C. Immersive virtual reality as a pedagogical tool in education: A systematic literature review of quantitative learning outcomes and experimental design. J. Comput. Educ. 2021, 8, 1–32. [Google Scholar] [CrossRef]
- Merchant, Z.; Goetz, E.T.; Cifuentes, L.; Keeney-Kennicutt, W.; Davis, T.J. Effectiveness of virtual reality-based instruction on students’ learning outcomes in K-12 and higher education: A meta-analysis. Comput. Educ. 2014, 70, 29–40. [Google Scholar] [CrossRef]
- Mikropoulos, T.A.; Natsis, A. Educational virtual environments: A ten-year review of empirical research (1999–2009). Comput. Educ. 2011, 56, 769–780. [Google Scholar] [CrossRef]
- Kim, K.G.; Oertel, C.; Dobricki, M.; Olsen, J.K.; Coppi, A.E.; Cattaneo, A.; Dillenbourg, P. Using immersive virtual reality to support designing skills in vocational education. Br. J. Educ. Technol. 2020, 51, 2199–2213. [Google Scholar] [CrossRef]
- Le, Q.T.; Pedro, A.; Park, C.S. A social virtual reality based construction safety education system for experiential learning. J. Intell. Robot. Syst. 2015, 79, 487–506. [Google Scholar] [CrossRef]
- Clark, R.E. Media will never influence learning. Educ. Technol. Res. Dev. 1994, 42, 21–29. [Google Scholar] [CrossRef]
- Zayas-Perez, B.; Perez-Ramirez, M. An instructional design model for virtual reality training environments. In EdMedia+ Innovate Learning; Association for the Advancement of Computing in Education (AACE): Morgantown, WV, USA, 2015; pp. 483–488. [Google Scholar]
- Gagne, R.M.; Briggs, L.J. Principles of Instructional Design; Holt, Rinehart & Winston: New York, NY, USA, 1974. [Google Scholar]
- Van Merriënboer, J.J.; Jelsma, O.; Paas, F.G. Training for reflective expertise: A four-component instructional design model for complex cognitive skills. Educ. Technol. Res. Dev. 1992, 40, 23–43. [Google Scholar] [CrossRef]
- Van Merriënboer, J.J.; Kirschner, P.A. Ten Steps to Complex Learning: A Systematic Approach to Four-Component Instructional Design; Routledge: London, UK, 2017. [Google Scholar] [CrossRef]
- Brockmann, M.; Clarke, L.; Winch, C. Knowledge, skills, competence: European divergences in vocational education and training (VET)—The English, German and Dutch cases. Oxf. Rev. Educ. 2008, 34, 547–567. [Google Scholar] [CrossRef]
- Zender, R.; Sander, P.; Weise, M.; Mulders, M.; Lucke, U.; Kerres, M. HandLeVR: Action-Oriented Learning in a VR Painting Simulator. In International Symposium on Emerging Technologies for Education; Springer: Cham, Switzerland, 2019; pp. 46–51. [Google Scholar]
- Elliott, J.B.; Gardner, M.; Alrashidi, M. Towards a framework for the design of mixed reality immersive education spaces. In Proceedings of the 2nd European Immersive Initiative Summit, Paris, France, 26–27 November 2012; pp. 63–76. [Google Scholar]
- Mulders, M.; Buchner, J.; Kerres, M.A. Framework for the Use of Immersive Virtual Reality in Learning Environments. Int. J. Emerg. Technol. Learn. (IJET) 2020, 15, 208–224. [Google Scholar] [CrossRef]
- Kim, Y.M.; Rhiu, I.; Yun, M.H. A Systematic Review of a Virtual Reality System from the Perspective of User Experience. Int. J. Hum.-Comput. Interact. 2019, 36, 893–910. [Google Scholar] [CrossRef]
- Fowler, C. Virtual reality and learning: Where is the pedagogy? Br. J. Educ. Technol. 2015, 46, 412–422. [Google Scholar] [CrossRef]
- Savin-Baden, M.; Gourlay, L.; Tombs, C.; Steils, N.; Tombs, G.; Mawer, M. Situating pedagogies, positions and practices in immersive virtual worlds. Educ. Res. 2010, 52, 123–133. [Google Scholar] [CrossRef]
- Radianti, J.; Majchrzak, T.A.; Fromm, J.; Wohlgenannt, I. A systematic review of immersive virtual reality applications for higher education: Design elements, lessons learned, and research agenda. Comput. Educ. 2020, 147, 103778. [Google Scholar] [CrossRef]
- Wu, B.; Yu, X.; Gu, X. Effectiveness of immersive virtual reality using head-mounted displays on learning performance: A meta-analysis. Br. J. Educ. Technol. 2020, 51, 1991–2005. [Google Scholar] [CrossRef]
- Makransky, G.; Petersen, G.B. The Cognitive Affective Model of Immersive Learning (CAMIL): A Theoretical Research-Based Model of Learning in Immersive Virtual Reality. Educ. Psychol. Rev. 2021, 33, 937–958. [Google Scholar] [CrossRef]
- Dengel, A.; Mägdefrau, J. Immersive learning explored: Subjective and objective factors influencing learning outcomes in immersive educational virtual environments. In Proceedings of the 2018 IEEE International Conference on Teaching, Assessment, and Learning for Engineering (TALE), Wollongong, Australia, 4–7 December 2018; pp. 608–615. [Google Scholar]
- Branch, R.M. Instructional Design: The ADDIE Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; Volume 722. [Google Scholar]
- Costa, J.M.; Miranda, G.L. Using Alice Software with 4C-ID Model: Effects in Programming Knowledge and Logical Reasoning. Inform. Educ. 2019, 18, 1–15. [Google Scholar] [CrossRef]
- Merrill, M.D. First principles of instruction. Educ. Technol. Res. Dev. 2002, 50, 43–59. [Google Scholar] [CrossRef]
- Merrill, M.D. Levels of instructional strategy. Educ. Technol. 2006, 46, 5–10. [Google Scholar]
- van Merrienboer, J.J.G.; Paas, F. Powerful learning and the many faces of instructional design: Toward a framework for the design of powerful learning environments. In Unravelling Basic Components and Dimensions of Powerful Learning Environments; de Corte, E., Verschaffel, L., Entwistle, N., van Merrienboer, J., Eds.; Elsevier Science: Oxford, UK, 2003; pp. 1–20. [Google Scholar]
- Van Merriënboer, J.J.G. Training Complex Cognitive Skills: A Four-Component Instructional Design Model for Technical Training; Educational Technology Publications: Englewood Cliffs, NJ, USA, 1997. [Google Scholar]
- Frerejean, J.; van Merriënboer, J.J.; Kirschner, P.A.; Roex, A.; Aertgeerts, B.; Marcellis, M. Designing. instruction for complex learning: 4C/ID in higher education. Eur. J. Educ. 2019, 54, 513–524. [Google Scholar] [CrossRef] [Green Version]
- Kreutz, J.; Leuders, T.; Hellmann, K. Professionsorientierung in Der Lehrerbildung: Kompetenzorientiertes Lehren Nach Dem 4-Component-Instructional-Design-Modell; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2019. [Google Scholar]
- Susilo, A.P.; Van Merriënboer, J.J.G.; Van Dalen, J.; Claramita, M.; Scherpbier, A. From lecture to learning tasks: Use of the 4C/ID model in a communication skills course in a continuing professional education context. J. Contin. Educ. Nurs. 2013, 44, 278–284. [Google Scholar] [CrossRef] [Green Version]
- Maggio, L.A.; Ten Cate, O.; Irby, D.M.; O’Brien, B.C. Designing evidence-based medicine training to optimize the transfer of skills from the classroom to clinical practice: Applying the four component instructional design model. Acad. Med. 2015, 90, 1457–1461. [Google Scholar] [CrossRef] [PubMed]
- Tjiam, I.M.; Schout, B.M.; Hendrikx, A.J.; Scherpbier, A.J.; Witjes, J.A.; Van Merrienboer, J.J.G. Designing simulator-based training: An approach integrating cognitive task analysis and four-component instructional design. Med. Teach. 2012, 34, 698–707. [Google Scholar] [CrossRef] [PubMed]
- Melo, M.; Miranda, G.L. Applying the 4C-ID model to the design of a digital educational resource for teaching electric circuits: Effects on student achievement. In Proceedings of the 2014 Workshop on Interaction Design in Educational Environments, Albacete, Spain, 9 June 2014; pp. 8–14. [Google Scholar] [CrossRef]
- Sarfo, F.K.; Elen, J. Developing. technical expertise in secondary technical schools: The effect of 4C/ID learning environments. Learn. Environ. Res. 2007, 10, 207–221. [Google Scholar] [CrossRef]
- Costa, J.M.; Miranda, G.L.; Melo, M. Four-component. instructional design (4C/ID) model: A meta-analysis on use and effect. Learn. Environ. Res. 2021, 25, 445–463. [Google Scholar] [CrossRef]
- Wopereis, I.; Frerejean, J.; Brand-Gruwel, S. Information. problem solving instruction in higher education: A case study on instructional design. In Information Literacy: Moving toward Sustainability; Kurbanoglu, S., Boustany, J., Špiranec, S., Grassian, E., Mizrachi, D., Roy, L., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Volume 552, pp. 293–302. [Google Scholar]
- Sweller, J.; Van Merrienboer, J.J.; Paas, F.G. Cognitive architecture and instructional design. Educ. Psychol. Rev. 1998, 10, 251–296. [Google Scholar] [CrossRef]
- Paas, F.G.; Van Merriënboer, J.J. Variability of worked examples and transfer of geometrical problem-solving skills: A cognitive-load approach. J. Educ. Psychol. 1994, 86, 122. [Google Scholar] [CrossRef]
- Kultusministerkonferenz (KMK) (2003). Rahmenlehrplan für Den Ausbildungsberuf Fahrzeuglackierer/Fahrzeuglackiererin. Beschluss der Kultusministerkonferenz vom 16.05.2003. Available online: https://www.kmk.org/fileadmin/Dateien/pdf/Bildung/BeruflicheBildung/rlp/fahrzeuglackierer.pdf (accessed on 17 June 2022).
- McKenney, S.; Reeves, T.C. Systematic. review of design-based research progress: Is a little knowledge a dangerous thing? Educ. Res. 2013, 42, 97–100. [Google Scholar] [CrossRef] [Green Version]
- Schwaber, K.; Beedle, M. Agile Software Development with Scrum; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 1. [Google Scholar]
- Mayer, R.E.; Moreno, R. Nine ways to reduce cognitive load in multimedia learning. Educ. Psychol. 2003, 38, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Van Merriënboer, J.J.; Clark, R.E.; De Croock, M.B. Blueprints. for complex learning: The 4C/ID-model. Educ. Technol. Res. Dev. 2002, 50, 39–61. [Google Scholar] [CrossRef]
- Dengel, A.; Buchner, J.; Mulders, M.; Pirker, J. Beyond the Horizon: Integrating Immersive Learning Environments in the Everyday Classroom. In Proceedings of the 2021 7th International Conference of the Immersive Learning Research Network (iLRN), Eureka, CA, USA, 17 May–10 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Smith, S.P.; Burd, E.L. Response activation and inhibition after exposure to virtual reality. Array 2019, 3, 100010. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
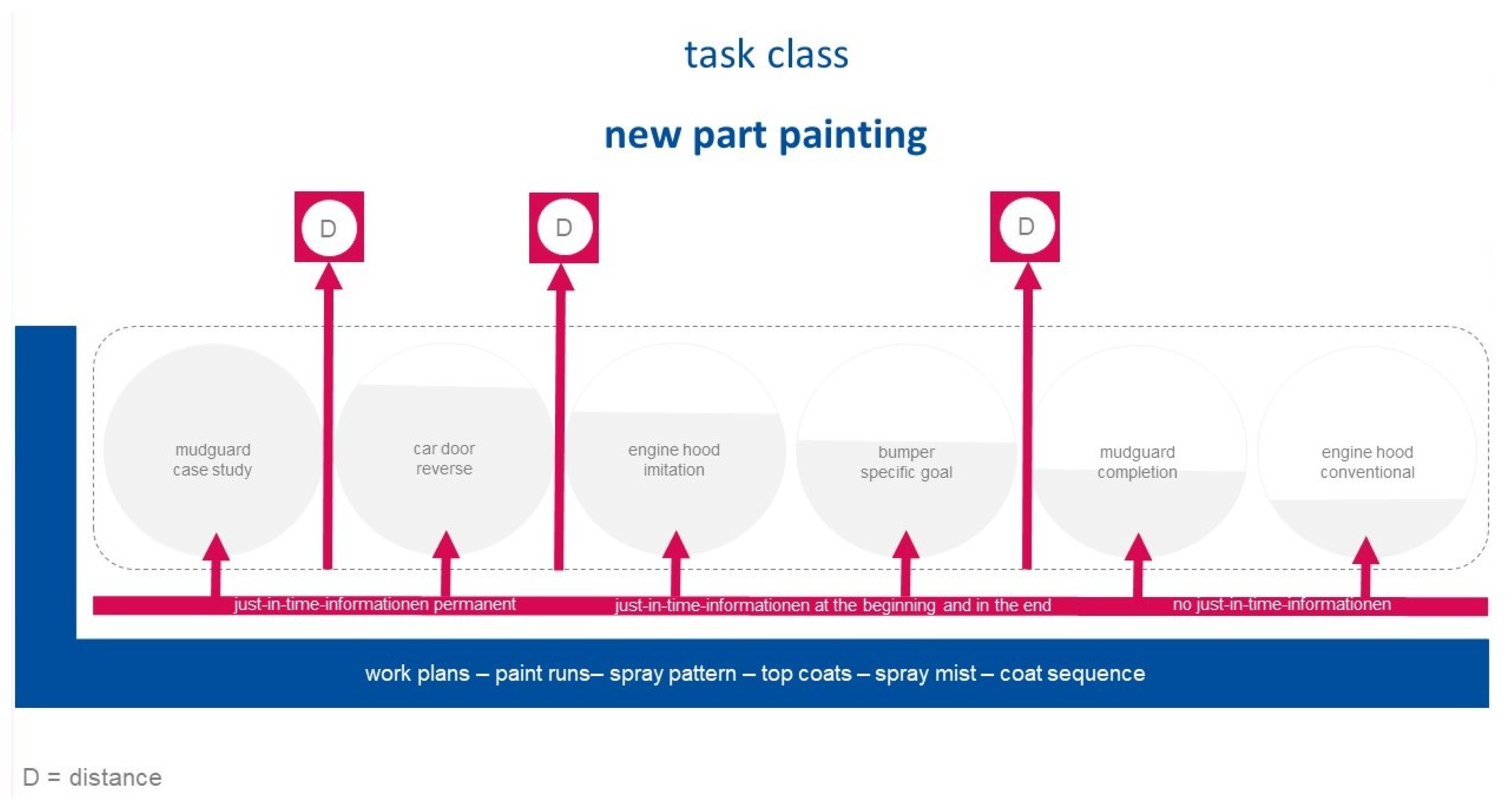
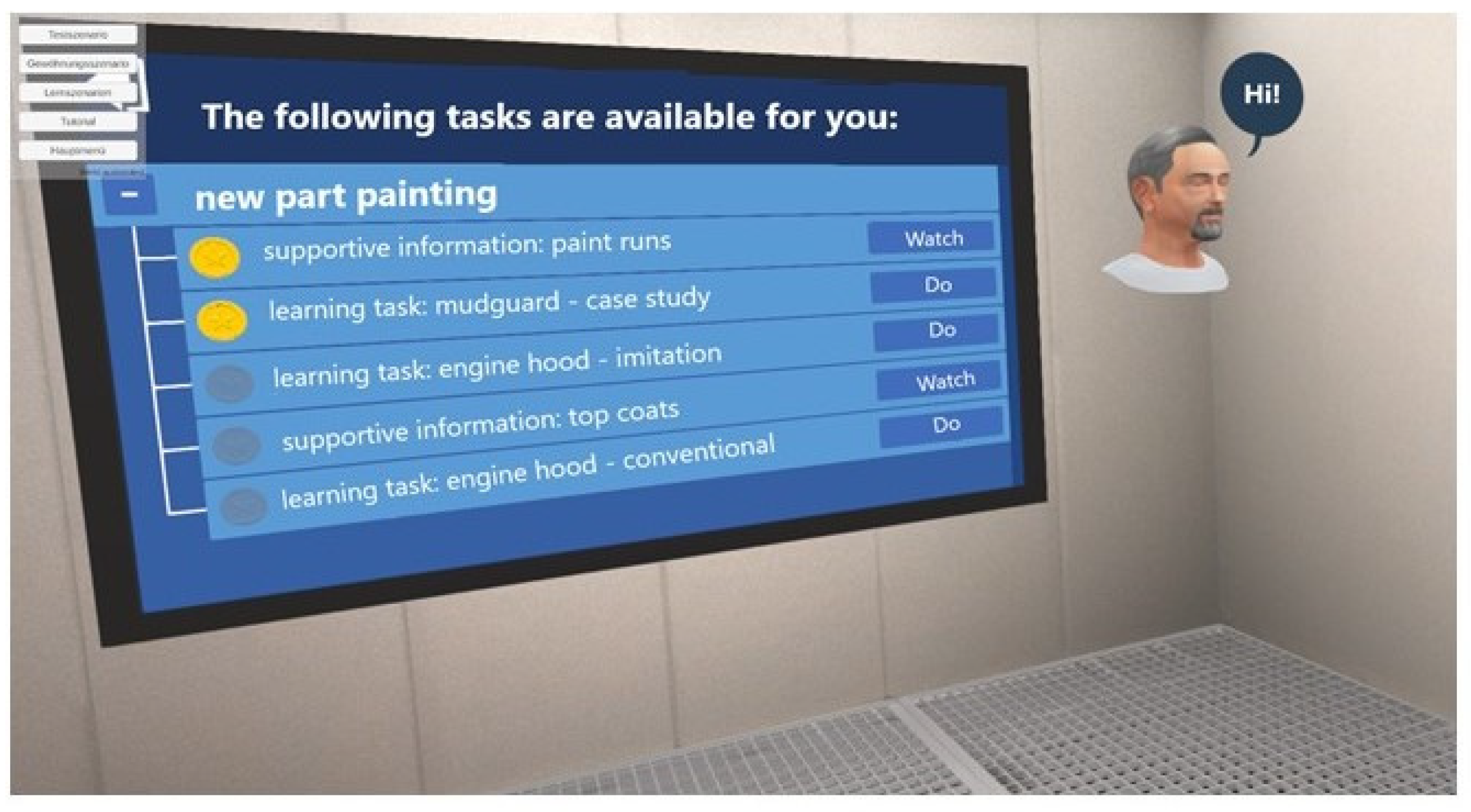
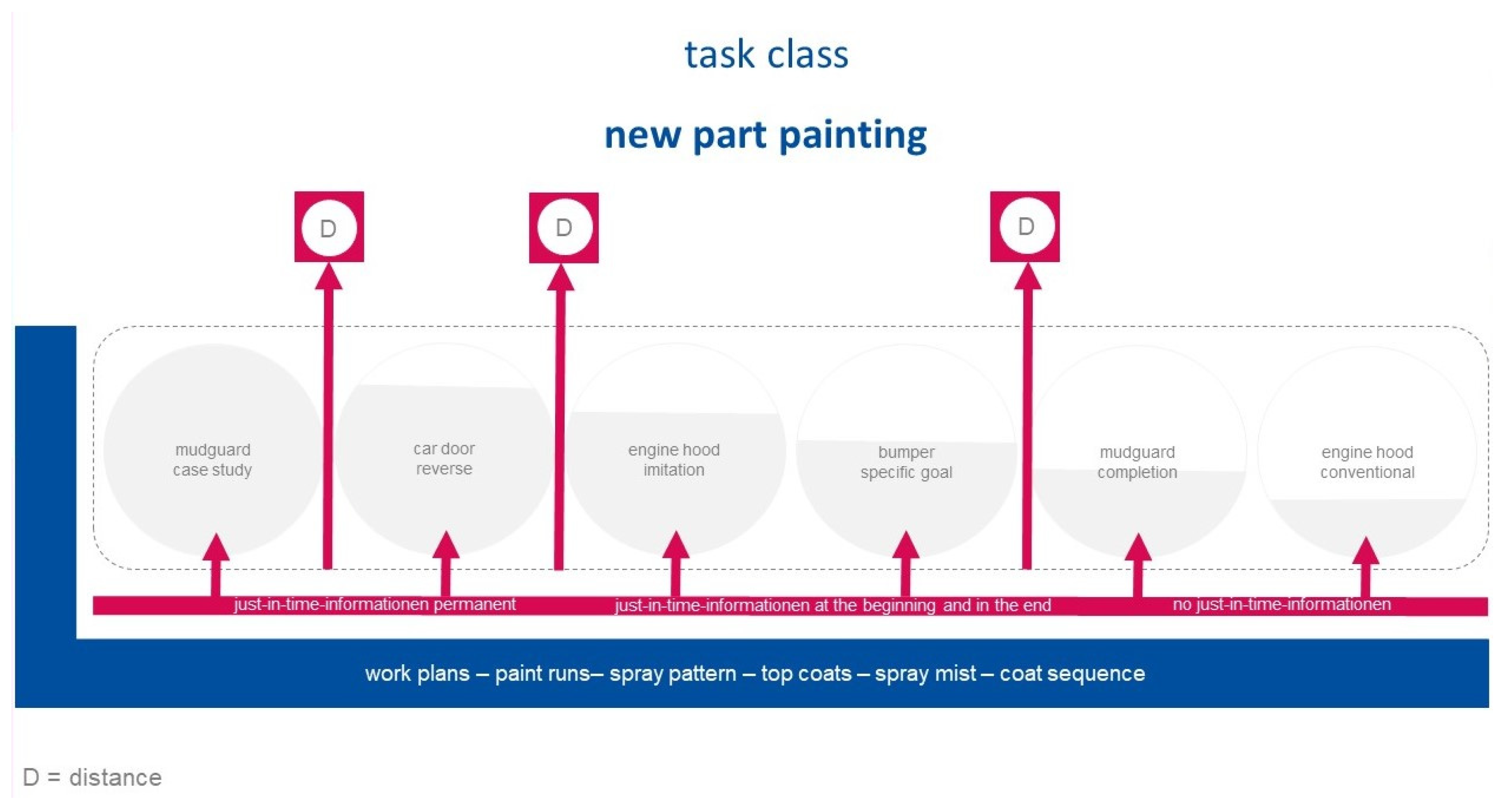
| task class 1: new part painting Trainees are confronted with customer orders belonging to new parts of a vehicle. The orders differ regarding learner support, type of workpiece, type of coat, number of coatings etc. No refinishing and no spot repair has to be done. | ||
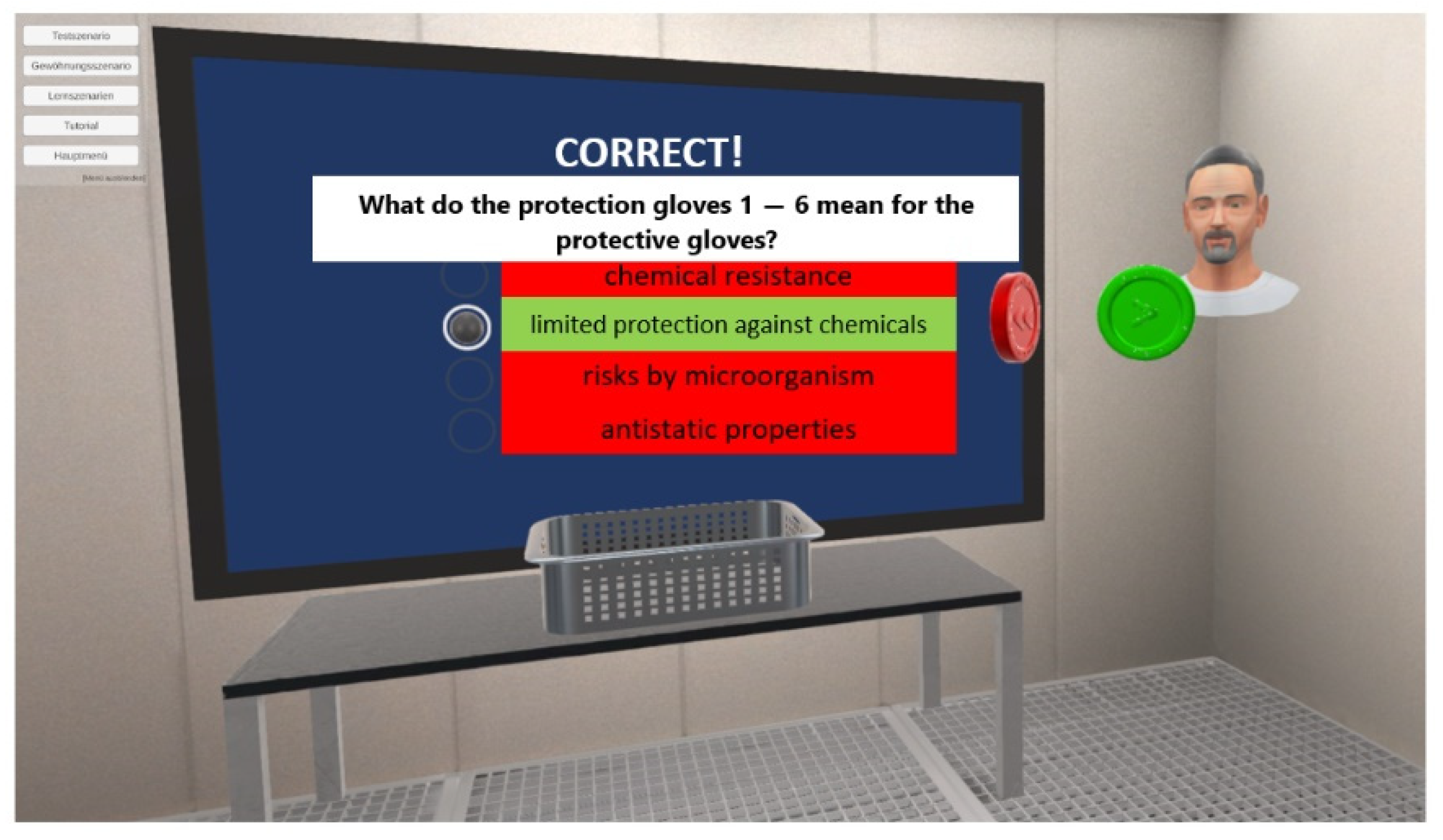
supportive Information: cognitive strategies
| ||
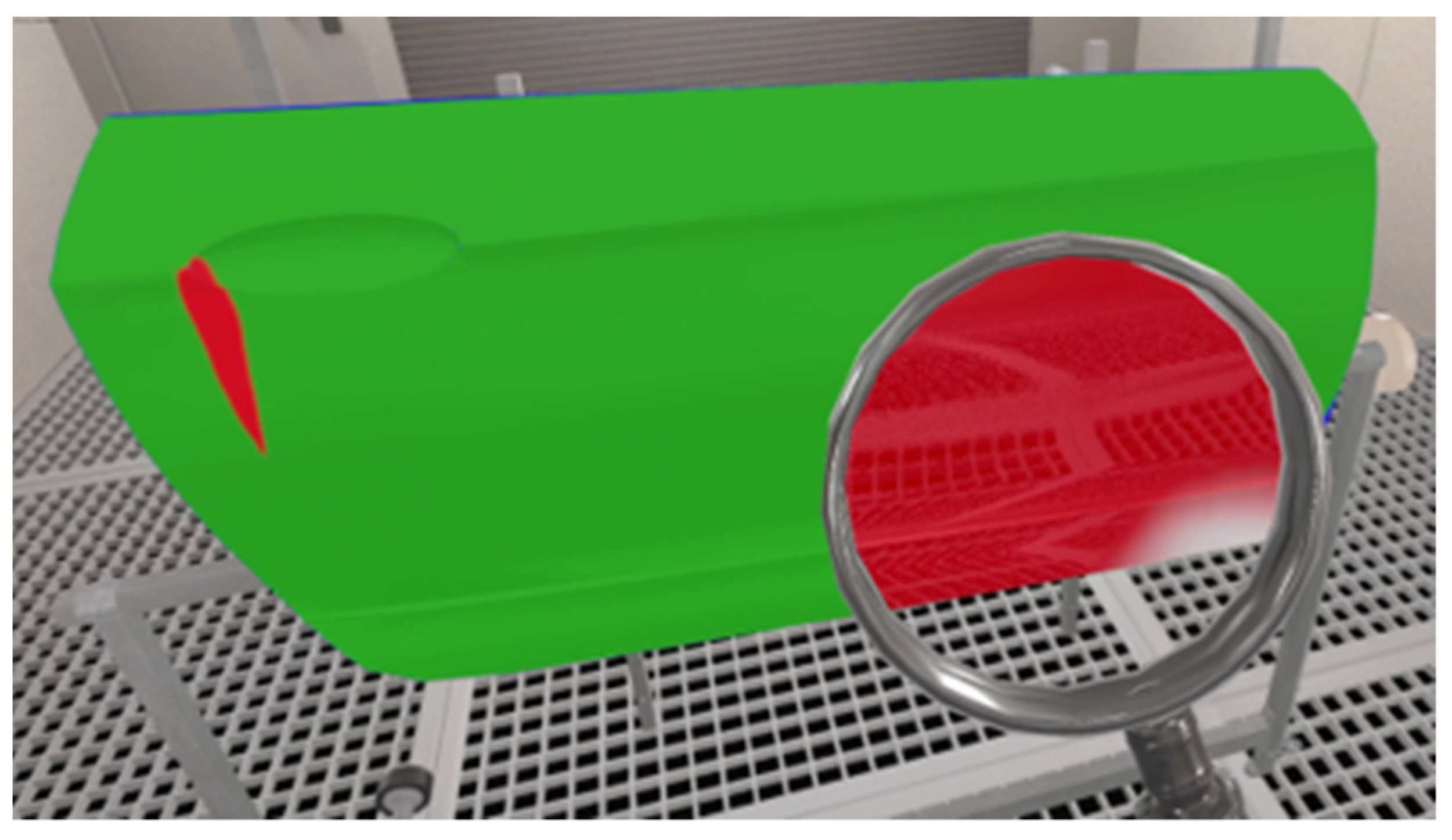
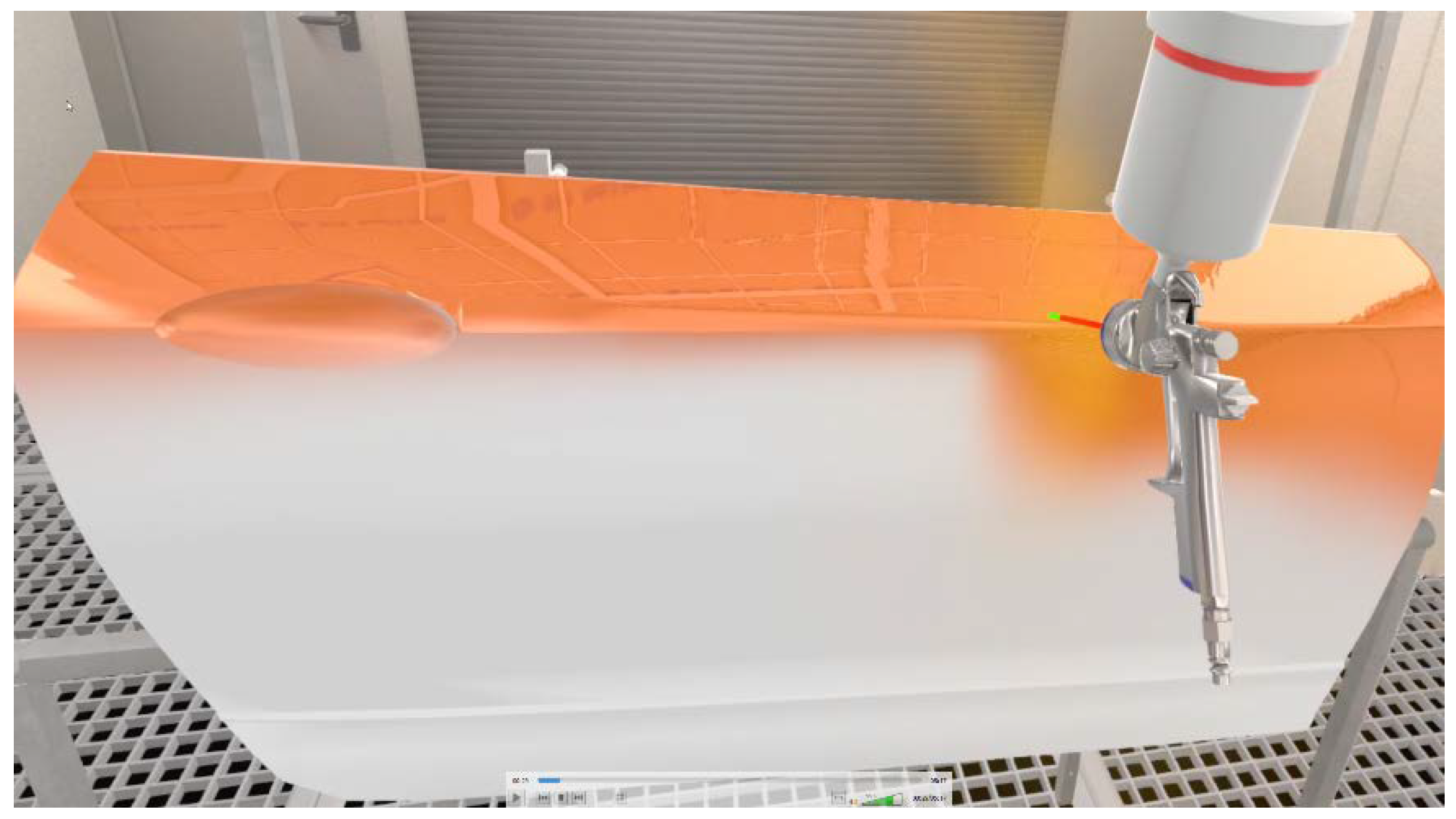
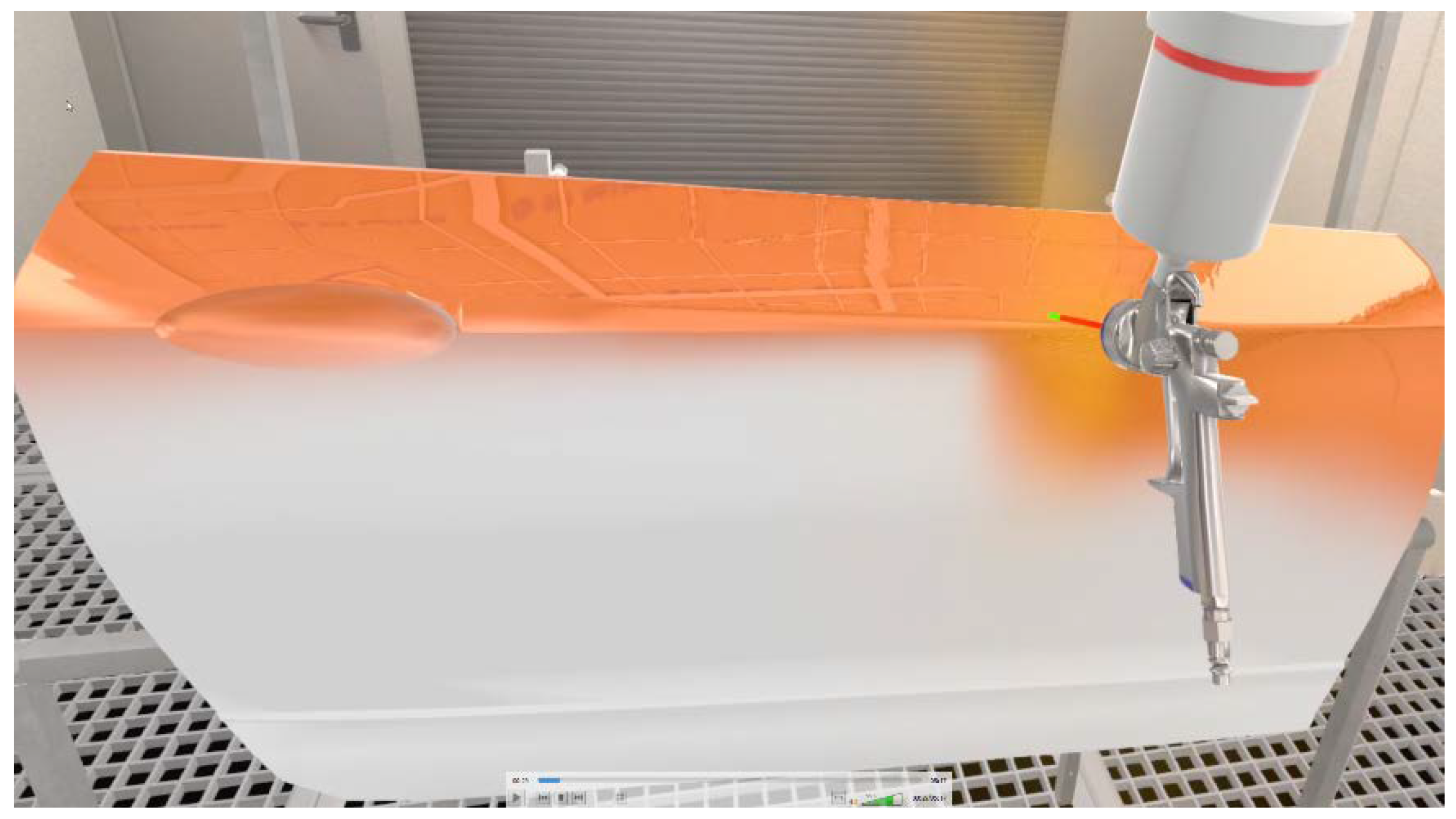
| Learning task 1.1: case study Trainees receive a worked-out example (best-practice of a virtual trainer) of applying a blue coat on a mudguard. After this, they have to do an orange one-layer coating on another mudboard. | Procedural information:
| Part-task-practice:
|
| Learning task 1.3: imitation Trainees receive another worked-out example (best-practice of a virtual trainer) of applying a coat on an engine hood. They should focus on trainers’ motoric skills. After this, they have to do an one-layer coating on another engine hood. | Procedural information:
| |
| Learning task 1.6: conventional Trainees receive a customer order. They have to apply three coats on an engine hood. After this, they have to rate their performance on the basis of one to three golden spray guns. | ||
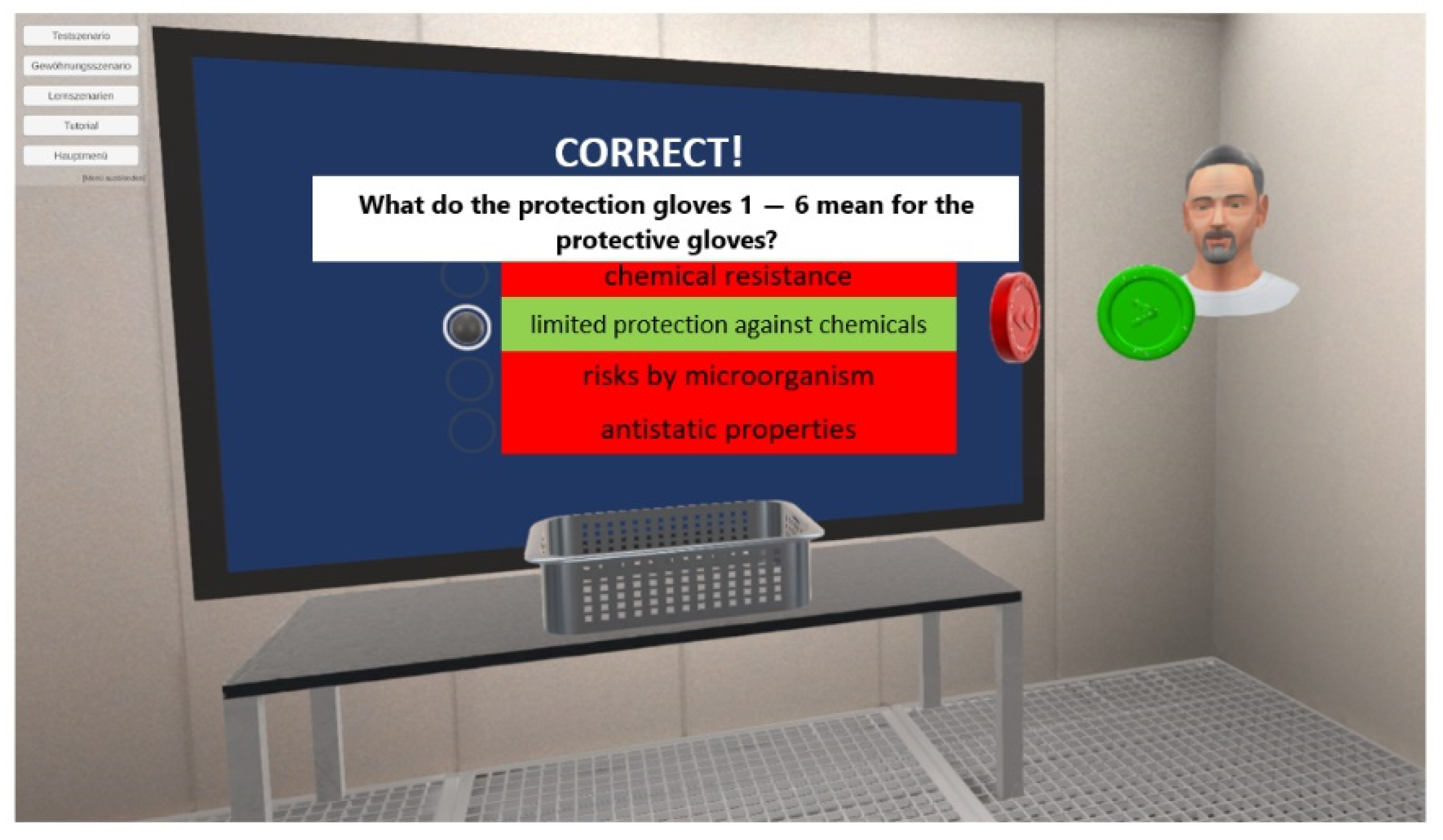
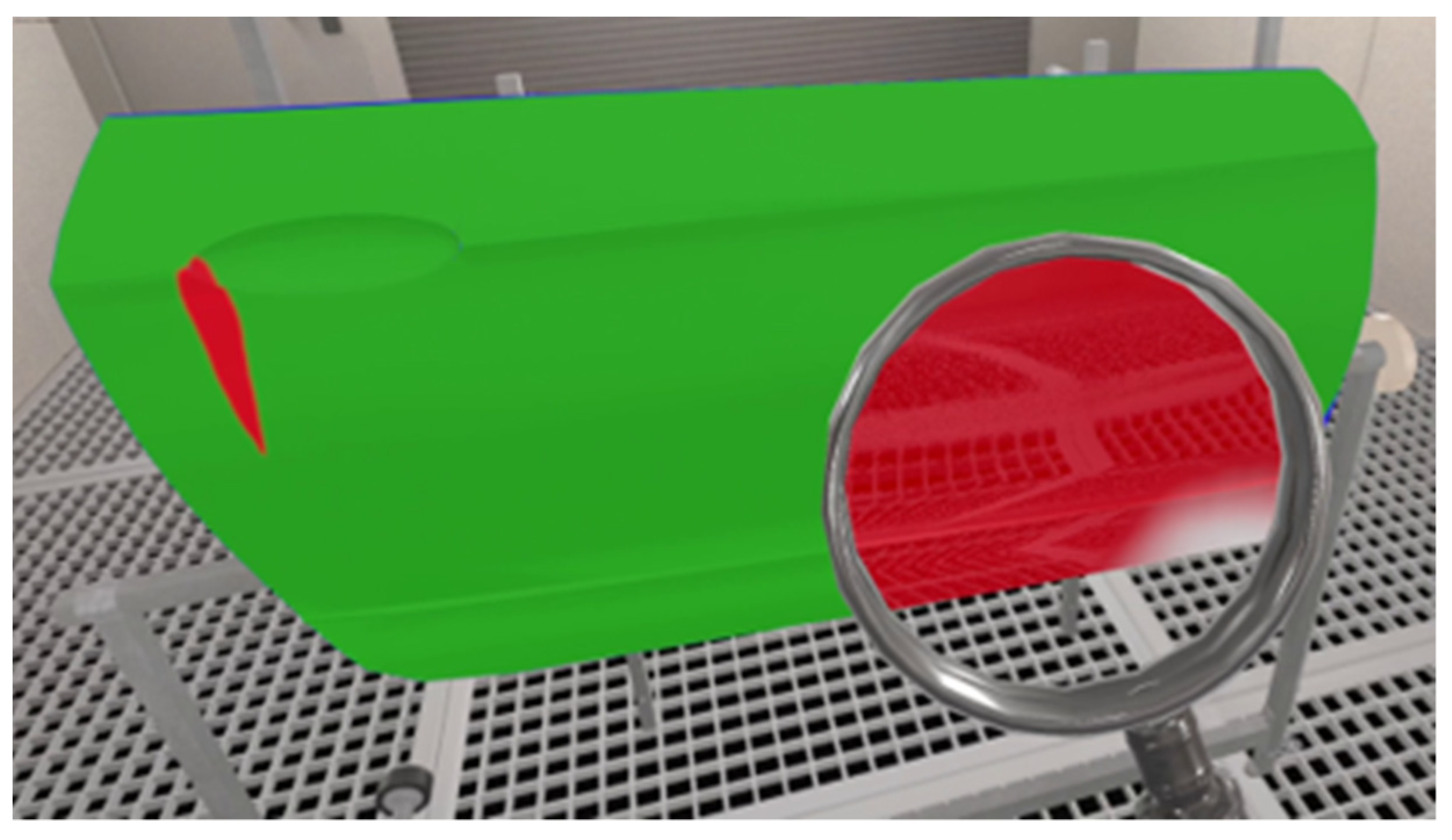
Supportive Information: corrective feedback
| ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mulders, M. Vocational Training in Virtual Reality: A Case Study Using the 4C/ID Model. Multimodal Technol. Interact. 2022, 6, 49. https://doi.org/10.3390/mti6070049
Mulders M. Vocational Training in Virtual Reality: A Case Study Using the 4C/ID Model. Multimodal Technologies and Interaction. 2022; 6(7):49. https://doi.org/10.3390/mti6070049
Chicago/Turabian StyleMulders, Miriam. 2022. "Vocational Training in Virtual Reality: A Case Study Using the 4C/ID Model" Multimodal Technologies and Interaction 6, no. 7: 49. https://doi.org/10.3390/mti6070049
APA StyleMulders, M. (2022). Vocational Training in Virtual Reality: A Case Study Using the 4C/ID Model. Multimodal Technologies and Interaction, 6(7), 49. https://doi.org/10.3390/mti6070049