1. Introduction
The introduction of vehicle automation is linked to various benefits, such as increase in overall safety, increase in fuel and transport efficiency, and reduction in road congestion [
1]. Vehicle automation is not limited to the automotive domain in terms of passenger cars. Fleet managers might also profit, especially regarding higher fuel efficiency and therefore a reduction in overall emissions and incurred costs. In highly automated driving (HAD), the driver does not have to monitor the system anymore [
2]. Instead, the system will prompt a takeover request if it is not able to handle the current traffic situation. The driver is able to engage in other non-driving-related tasks. In the domain of truck driving, truck drivers are supposed to engage in vocational tasks, such as completing delivery documents or engaging in vocational training [
3,
4,
5].
Vehicle automation also comes with a variety of possible downsides. In HAD, the driver is excluded from the driver vehicle control loop. A phenomenon known as out-of-the-loop-unfamiliarity (OOFTLU) may occur, leaving: “[…] operators of automated systems handicapped in their ability to take over manual operations in the event of automation failure” [
6]. A loss of skills and situational awareness, as well as a shift from active to passive information processing, are just a few factors negatively influencing the driver’s ability to take over the driving task again. Another psychological phenomenon closely related to HAD is inappropriate trust ratings about the system’s capabilities and limitations, with drivers either mistrusting or overtrusting the automated system [
7,
8]. Incomplete and incorrect mental models about the HAD system further negatively influence the driver–automation interaction [
8,
9,
10].
Research has already engaged in the investigation of ideal takeover times [
11,
12,
13,
14,
15,
16]. Results show that takeover times depend on various aspects, such as the overall driver state (fatigue, drowsiness, vigilance [
17,
18,
19]), the prevailing traffic situation (complexity, traffic density [
16,
20,
21]) as well as engagement in, and characteristics of, non-driving-related tasks [
13,
22]. Interruptability of non-driving-related tasks is furthermore influenced by the amount of physical effort that is necessary to turn away from the secondary task [
23]. Findings from literature regarding the execution of non-driving-related tasks vary. While some studies have reported negative effects of non-driving-related tasks before an occurring takeover situation [
15,
20,
24], others have reported positive effects of non-driving-related tasks on the takeover performance [
25]. Gold et al. [
15] noted that most results from literature were derived from controlled experiments, only varying in a limited number of independent variables and excluding possible combinatory effects. Hence, Gold et al. [
15] proposed a quantitative approach for modeling the takeover performance of level 3 automated vehicles. Results suggested that the prevailing time budget, traffic density, and learning effects affected takeover performance the most. Non-driving-related tasks and driver age seemed to have less influence on takeover performance [
15].
So far, most research in the area of HAD has been conducted on passenger cars. The profession of truck driving cannot be easily compared with regular car driving [
26]. Driving hours are longer, and the overall pressure on drivers is higher due to a general shortage of drivers and time constraints (e.g., just-in-time delivery) [
27,
28]. Therefore, conducted research might be taken as a first insight but cannot be transferred to the domain of truck driving.
Research on HAD in passenger cars has investigated the ideal human–machine interface (HMI) strategy. Providing feedback to the driver about the systems intentions and objectives is one of the most important factors when it comes to HMI design for automated driving [
10,
29]. Stockert et al. [
30] and Beller et al. [
31] took a closer look at how additional information in the form of system uncertainty information (ACC) influenced the driver–automation interaction. Study results showed that the inclusion of system uncertainty information positively enhanced the interaction in terms of trust and acceptance. Körber et al. [
32] evaluated whether providing an additional explanation for a takeover request in automated driving influenced trust in automation and acceptance. Results revealed that an additional explanation for a takeover request did not influence trust or acceptance but increased the perceived understanding of the system. Creating a deeper understanding about the automated systems capabilities and limitations by adding more detailed information might enable a higher controllability on behalf of the driver when it comes to takeover situations. Controllability is defined as the “likelihood that the driver can cope with driving situations including ADAS (Advanced Driver Assistance Systems)-assisted driving, system limits, and system failures” ([
33], p.5).
In a larger scope of expert workshops and user studies, Richardson et al. [
3,
26,
34] developed an HMI strategy for highly automated truck driving following the user-centered design process DIN EN ISO 9241-210 [
35]. The approach consisted of four phases and incorporated the understanding and specification of context of use, specification of user requirements, creation and development of design solutions, and product evaluation. All four steps followed an iterative approach, meaning that every phase was passed through several times until the ideal solution that fit user needs and requirements was found. All phases could be addressed individually with different qualitative and quantitative approaches (e.g., expert or user evaluation). Richardson et al. [
3] collected specific context information for HMI design for HAD with an online questionnaire and a semi-structured interview with truck drivers and fleet managers [
3]. Specific user requirements were gathered using focus groups and a driving simulator study with users [
26]. Based on the context information and specific user requirements found, scribbles, paper prototypes, and video prototypes were built and iteratively evaluated with experts [
3,
34]. Richardson et al. [
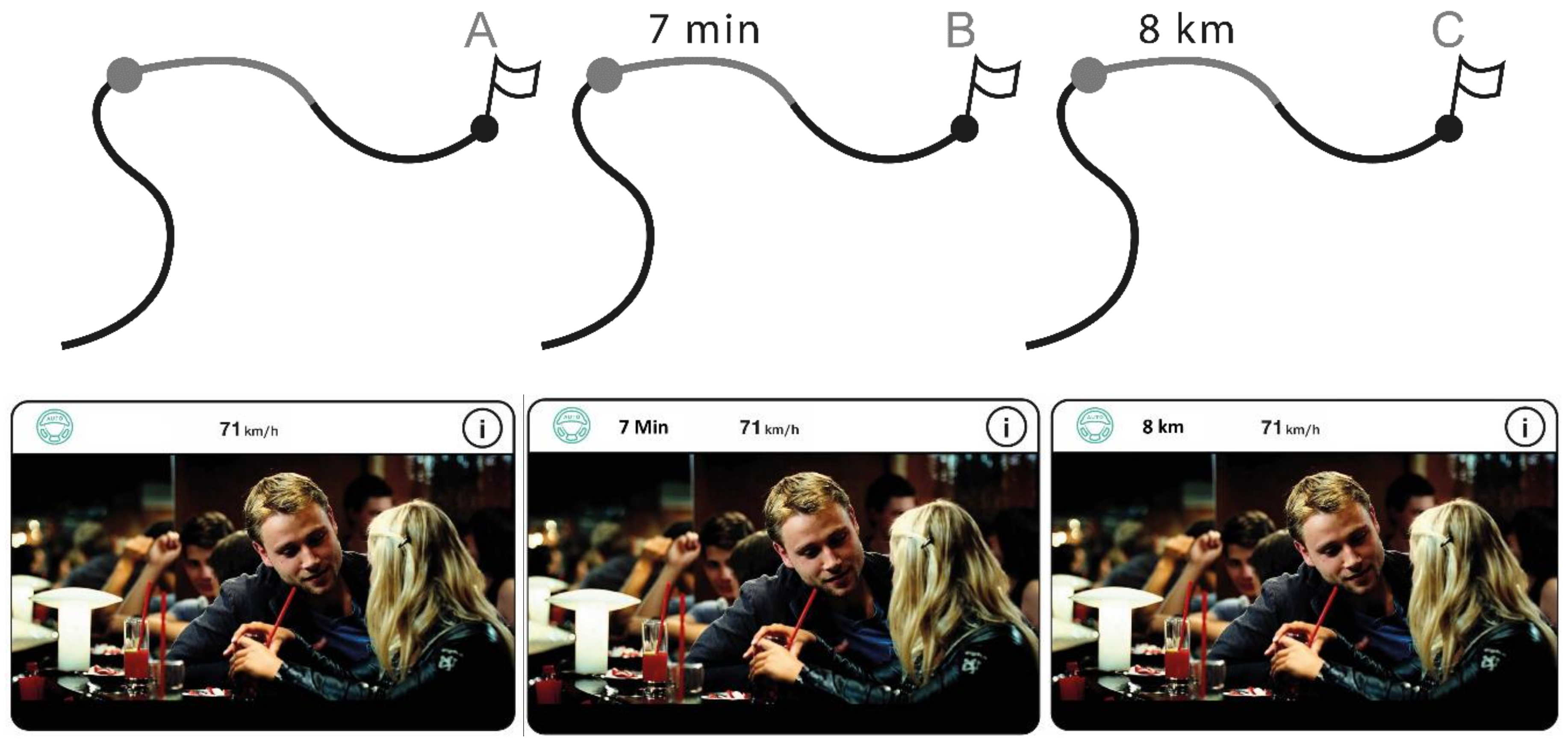
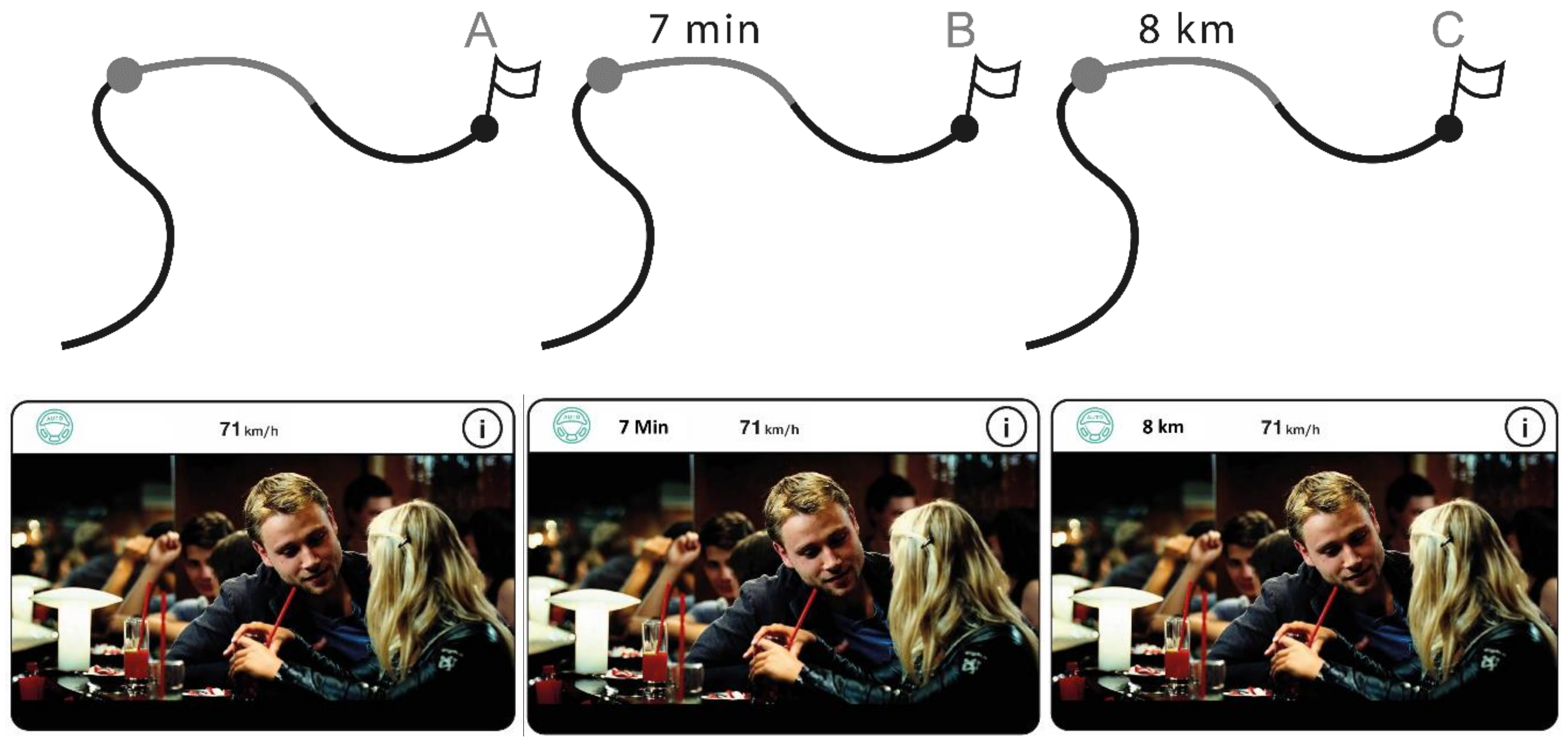
34] reported a multimodal HMI concept that incorporated several elements, such as a LED bar below the windshield, a head-up display (HUD), an instrument cluster (IC), augmented reality (AR) elements in the front screen, and a combined central information (CID) and entertainment display.
In the last expert evaluation conducted [
34], the question of whether information about the remaining time until a takeover occurs should or should not be presented could not be answered. Furthermore, experts were not sure which presentational format (time- or distance-based) should be used to communicate the remaining time (e.g., “Please take over in 10 s” vs. “Please take over in 220 m”).
5. Discussion
In this study, the effect of presenting additional information to drivers during highly automated driving was investigated. Furthermore, the influence of the presentational format of information presented (time-based vs. distance-based) was evaluated.
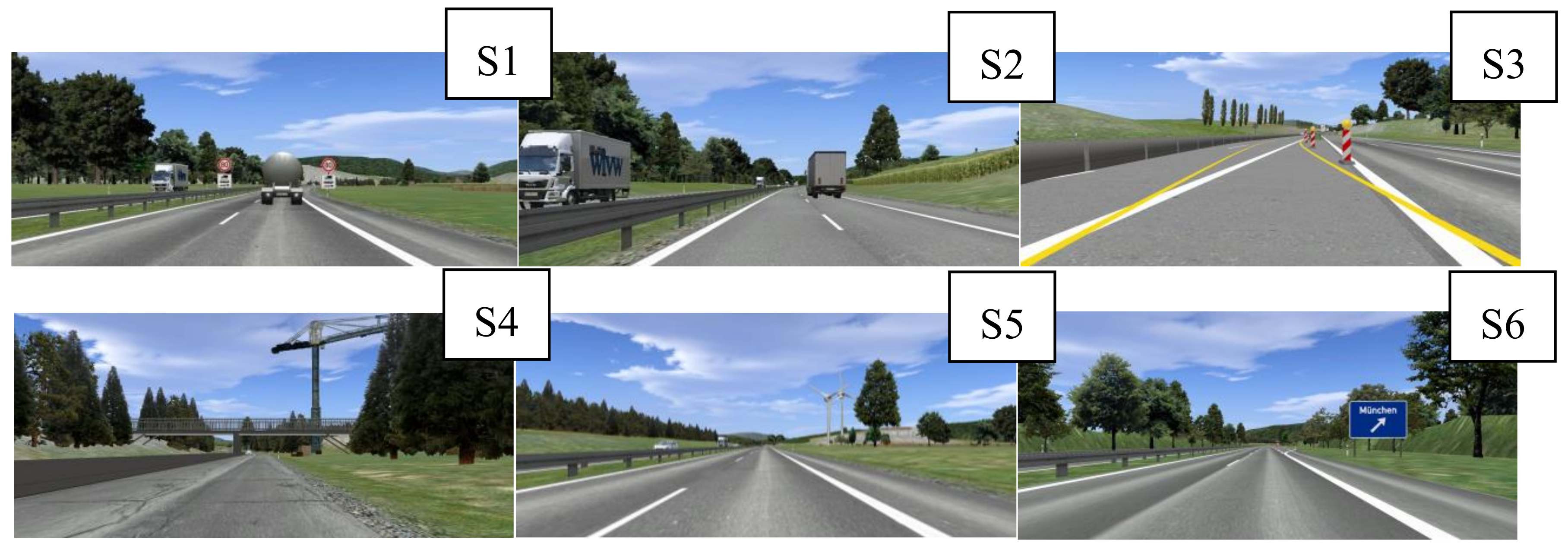
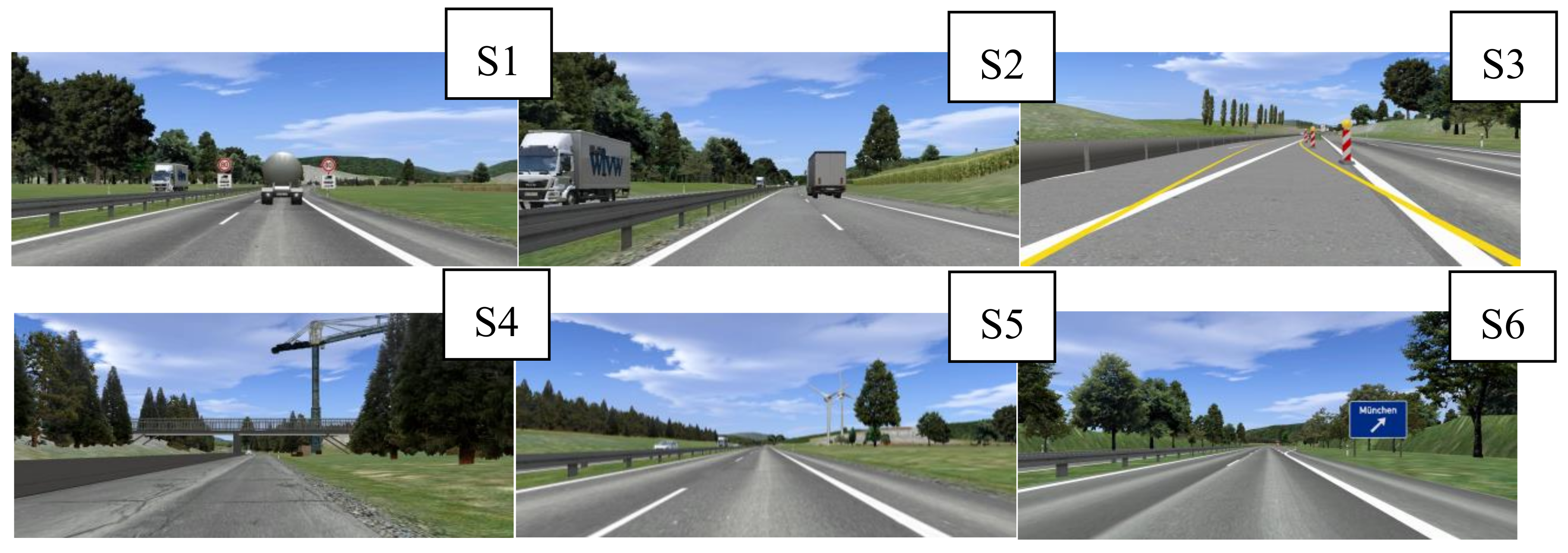
The experimental setup consisted of three consecutive highway drives with a level 3 automated truck, including engagement in a non-driving-related task (reading). The participants encountered six different traffic situations: Situation 1 and 2 were noncritical situations that could be managed by the automated driving system. Situation 3 to 6 represented critical situations that required a takeover by the driver. Due to the abilities of automated systems, a 60 s warning phase could be prompted by the system for situation 3 and 6. Situation 4 and 5 prompted short 10 s takeover phases.
The research questions asked whether the presentation of additional information influenced the driver–automation interaction in terms of an improvement regarding the objective criteria (Q1). Furthermore, the study examined if the presentational format of additional information (time vs. distance-based) affected the interaction (Q2).
Evaluation of acceptance descriptively showed good ratings for all three concepts, indicating that the basic layout of the HMI was useful and satisfying. Descriptive analysis further revealed higher ratings for both subscales usefulness and satisfying for concepts B and C. Inferential statistics could find a significant effect for all pairwise comparisons, with participants favoring concept C. The calculation of effect sizes also showed that relevant effects were prevailing and strongly supported the assumption that concepts offering more information influence the driver–automation interaction in terms of acceptance in a positive way. Results showed that additional information (distance-based) positively influenced the overall perceived usefulness.
Results regarding the satisfying scale showed that participants were more satisfied if additional (time-based or distance-based) information were presented.
These findings were supported by the workload assessment (DALI), showing that the more detailed concepts led to a lower workload in the seven subscales. Descriptively, concept A scored the highest on all workload subscales. In terms of reducing situational stress in HAD, participants rated concept C (distance-based) as creating the least stress. The presentation of additional information positively influenced the completion of non-driving-related tasks, especially in the distance-based presentational format.
Controllability ratings substantiated the findings. All three concept alternatives achieved low controllability ratings. The upper limit of <7 was not reached. Concepts offering additional information reached inferential significance. The calculation of effect sizes showed that additional information (distance-based) was able to positively influence the driver–automation interaction in terms of controllability.
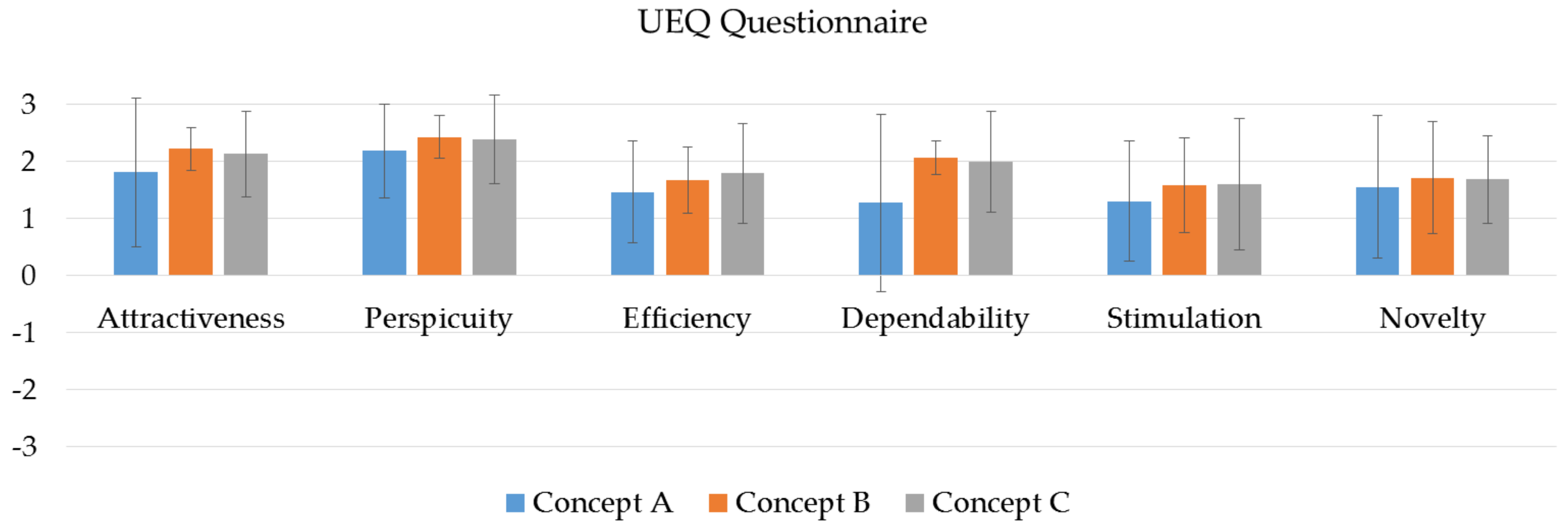
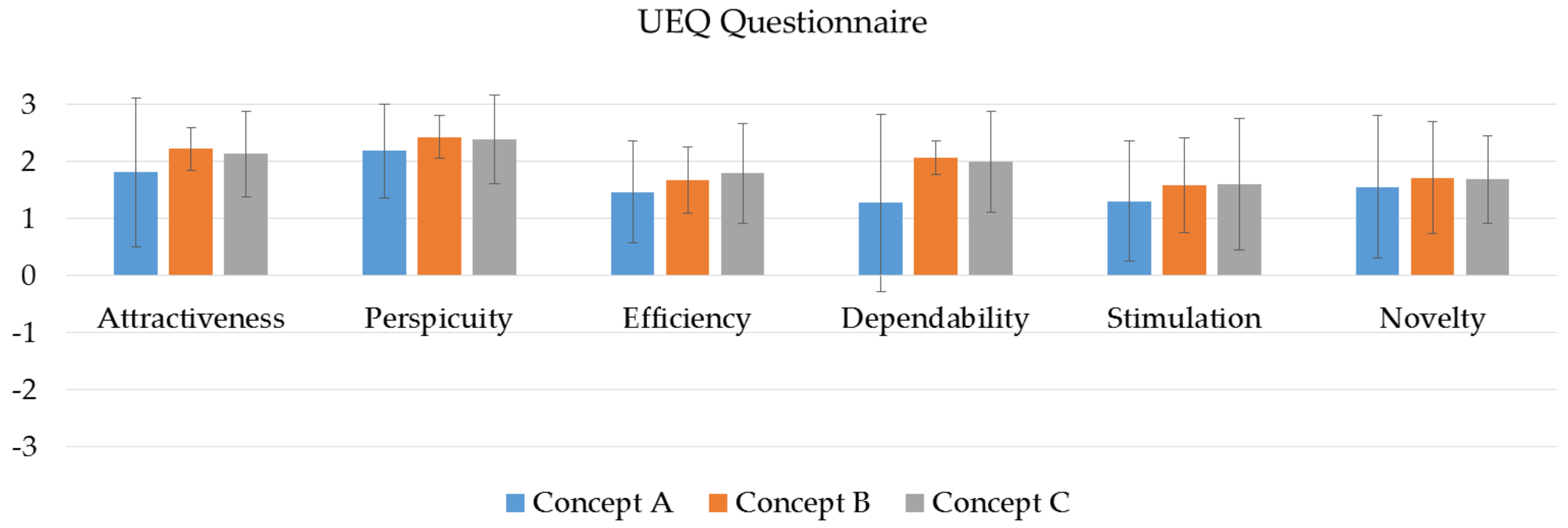
The results obtained from the UEQ showed high ratings for concept B and C for all subscales, with all values being located above 1.5. Concept A, which offered only limited information, descriptively scored below 1.5 for the subscales efficiency, perspicuity, and stimulation. The dimension perspicuity, which enables the driver to understand the system and its actions, evoked high ratings for all three concepts. This led to the conclusion that the basic HMI designed was able to safely apply HAD. Regarding the subscales dependability and efficiency, concept A scored the lowest. The results obtained for concepts B and C showed that additional information was able to positively enhance the system’s dependability and efficiency.
Participants’ qualitative comments reflected the found results, indicating that participants preferred the HMI concept with additional information, with the distance-based concept being favored. This might be due to the fact that professional truck drivers generally spend more time on the road dealing with distance-based information. Thus, truck drivers might be able to better interpret and get more information out of distance-based information compared to car drivers.
Literature in the area of automated truck driving is sparse, and comparisons with research in the area of passenger cars have its limitations. The results of this study nevertheless reflect the trend that HMI concepts for automated driving benefit from additional information, which explains the automated systems behavior in more detail (e.g., system uncertainty [
30,
31], reason why a takeover occurred [
32]). The findings furthermore strengthen the fact that system feedback plays an important role when it comes to system understanding and usability of automated systems.
Some limitations of this study need to be noted. The assessment of affinity for technology revealed high overall technological affinity in the sample size. This might have influenced participants’ acceptance and usability ratings towards a more positive evaluation, thus lowering the potential for generalization. Another limitation relates to the assessment of takeover quality. Due to the scenario design, participants’ takeover reaction was limited to the deactivation of the system, continuing straight ahead on the motorway. Only in situation 3 (construction site) participants had to follow the new yellow lane markings; a lane change was not required. Video recordings and experimental protocols were prepared for each participant for the assessment of takeover quality. Retrospective analysis showed that driving errors and accidents occurred in the construction site scenario independent of the HMI concept driven. Subsequent inquiry revealed vagueness of the simulator steering system. This might have led to inappropriate steering interventions.
Takeover response times were not recorded in this study. The existing literature has already tried to investigate the ideal takeover time and indicated that takeover time depends on various factors. Hence, a 60 and 10 s time frame was chosen for the underlying study. All participants were able to take over the driving task in the proposed time period, tending to take over the driving task immediately after the takeover request had been prompted, irrespective of the remaining time left.
For the calculation of inferential statistics, nonparametric tests were chosen. Due to the conservative alignment of the tests, it might be that not all effects could be found. Therefore, effect sizes were calculated to reveal whether a relevant effect was prevailing. Another limitation lies in the chosen experimental design, with all participants rating all three HMI concepts. Concept alternatives and test drives were fully randomized, but learning processes might still have occurred, influencing participants’ evaluation.




{kind=link}
{kind=link}
{kind=link}
{kind=link}