In this section, we present the graphs of the system’s key variables, obtained from the best solutions of the GWO method, to demonstrate compliance with all constraints. Other optimization methods are not analyzed, as the proposed GWO approach achieved the best results in both operation modes: grid-connected and standalone.
5.4.1. On-Grid Mode
This section details the impact on voltage, current, power, and SoC achieved through the smart operation of DERs using the GWO method in the microgrid’s on-grid mode.
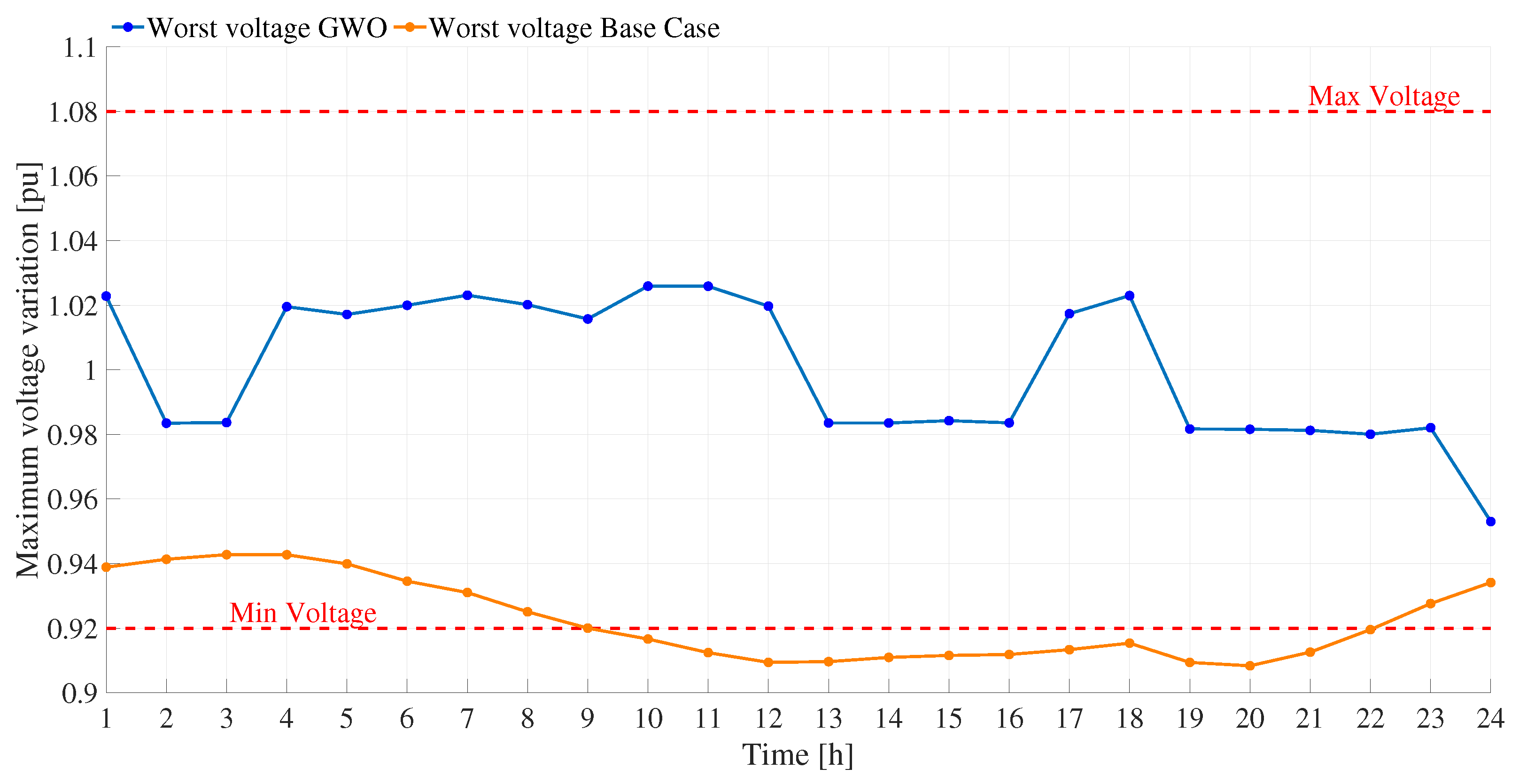
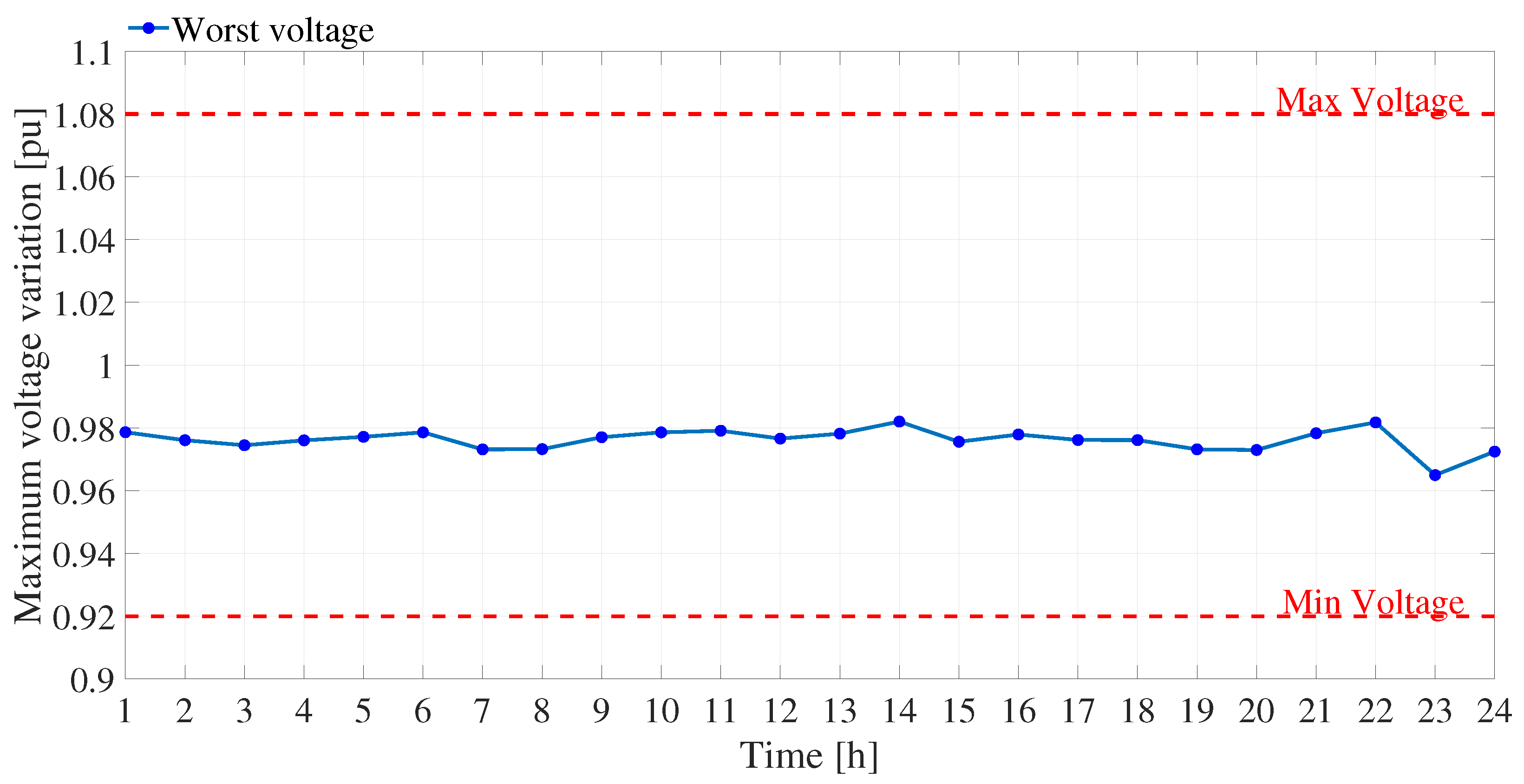
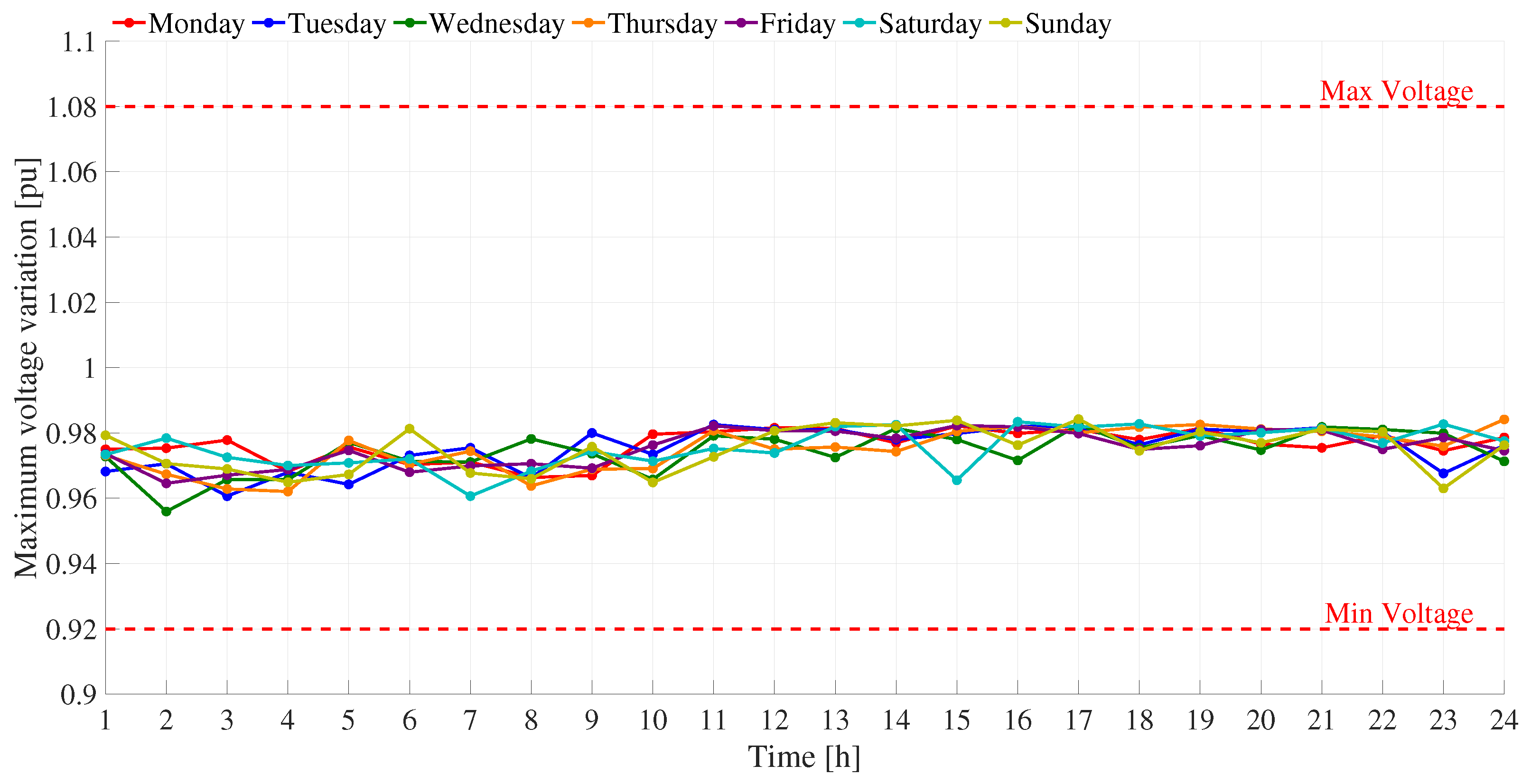
Figure 12 presents the worst nodal voltage at each analyzed time period
h, representing the maximum voltage variation in the system. The figure compares the voltage profiles obtained for the base case, without DER generation, and for the best solution provided by the proposed GWO-based optimization strategy. In the base case, the voltage levels violate the operational limits imposed for the microgrid, highlighting the inadequacy of the system without the support of distributed energy resources. In contrast, the solution obtained through the proposed GWO methodology maintains all voltage levels within the specified limits across the entire network and achieves an average voltage improvement of 8.47%. The analysis confirms that the GWO method consistently ensures compliance with the assigned voltage limits throughout the entire operating horizon. These results demonstrate that the proposed GWO-based strategy not only achieves the lowest operational costs compared to the other evaluated methodologies but also significantly enhances voltage stability in the microgrid.
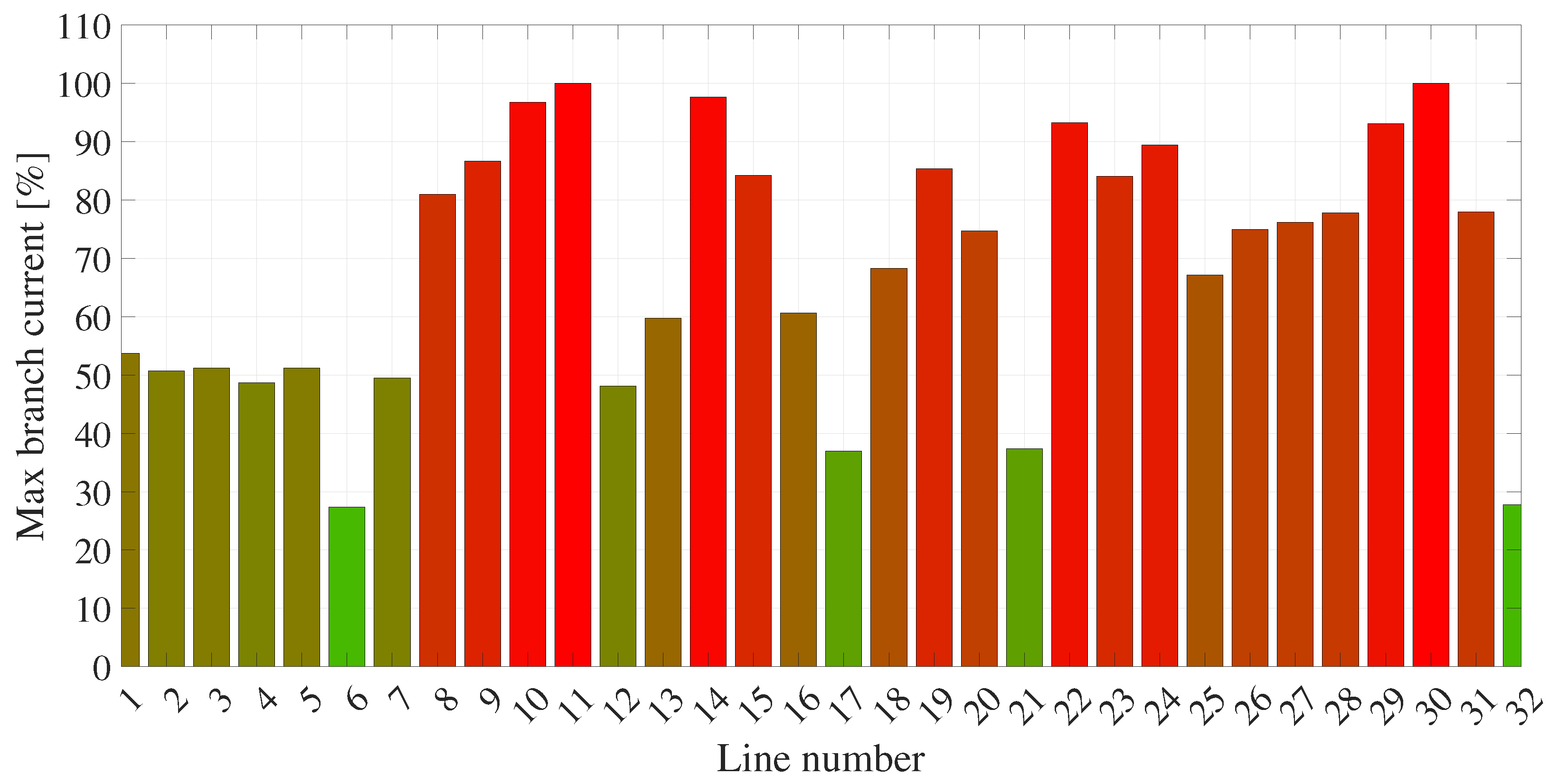
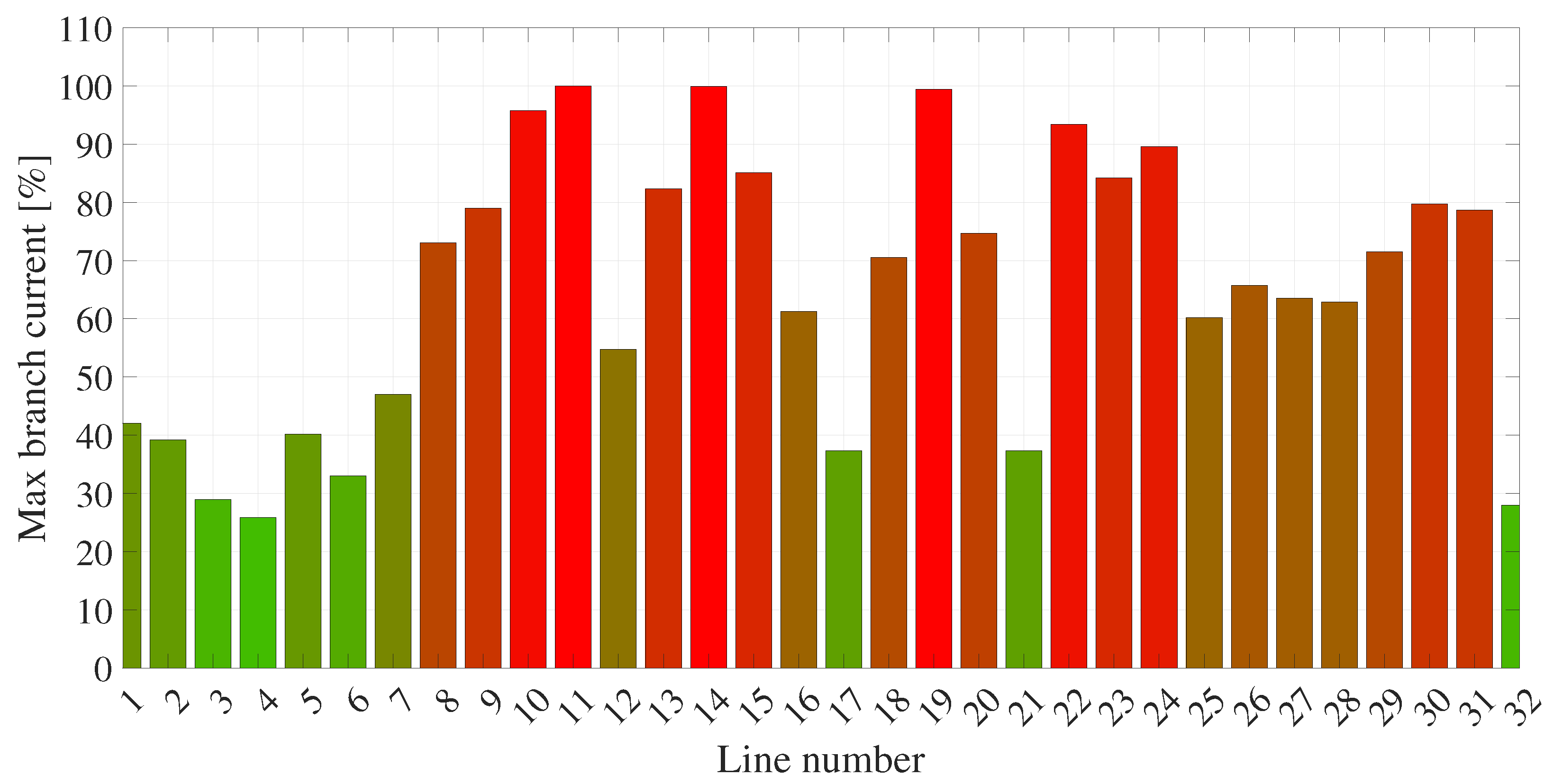
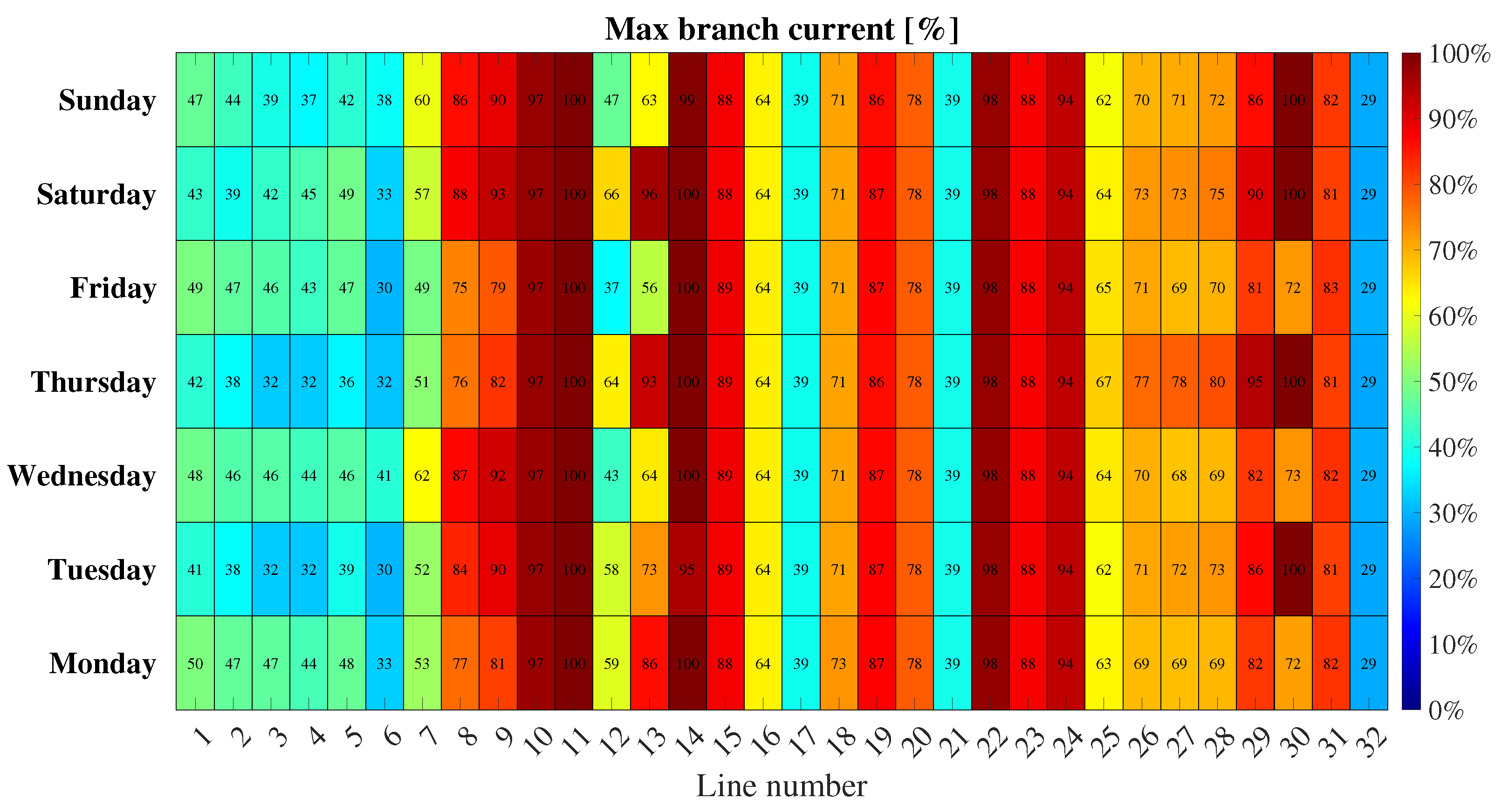
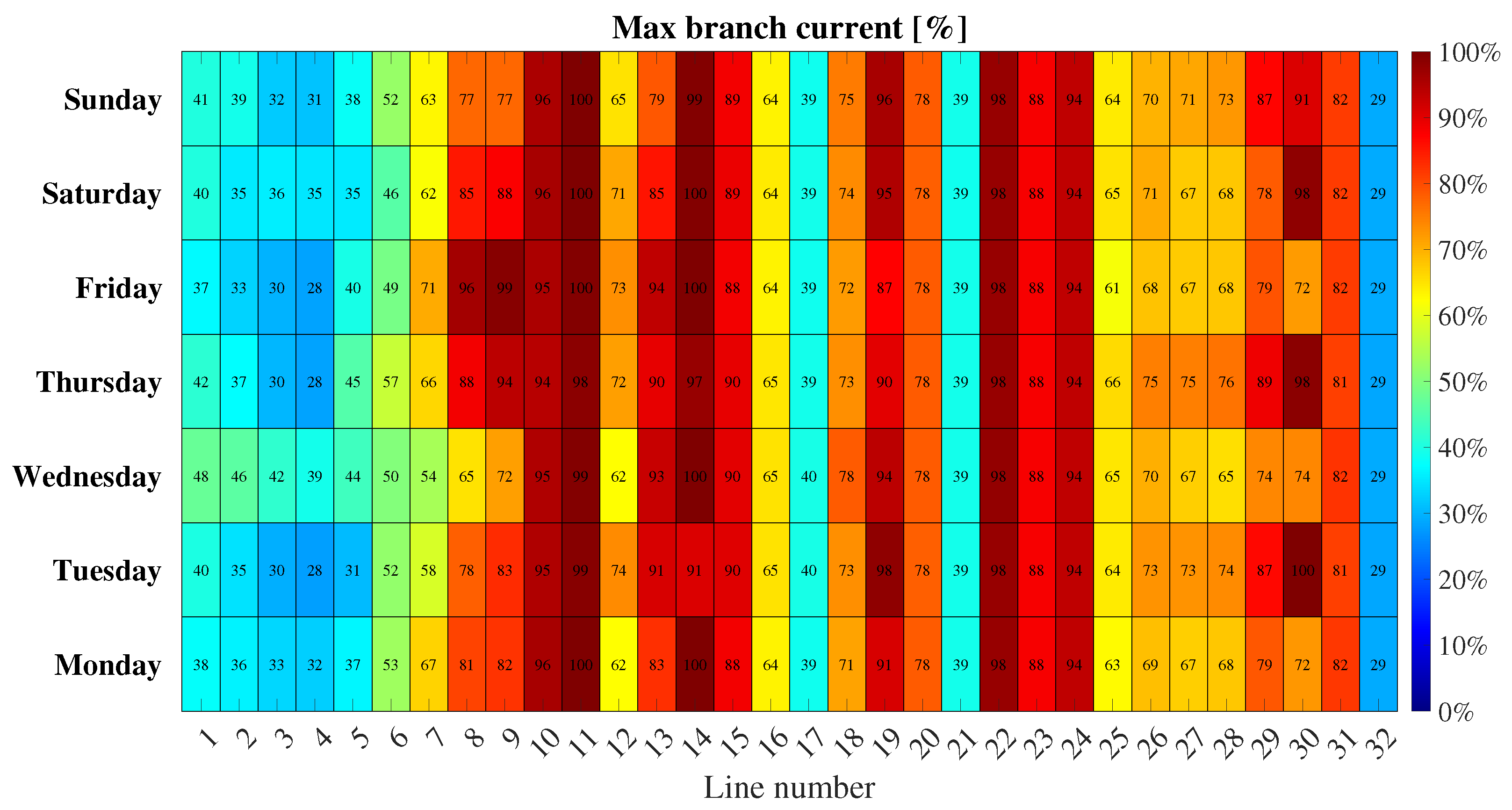
For the maximum line current level across all branches of the AC microgrid,
Figure 13 demonstrates that all branches comply with the predefined maximum current limits. The values remain between 0% and below 100%, ensuring that the proposed methodology effectively maintains current within permissible limits.
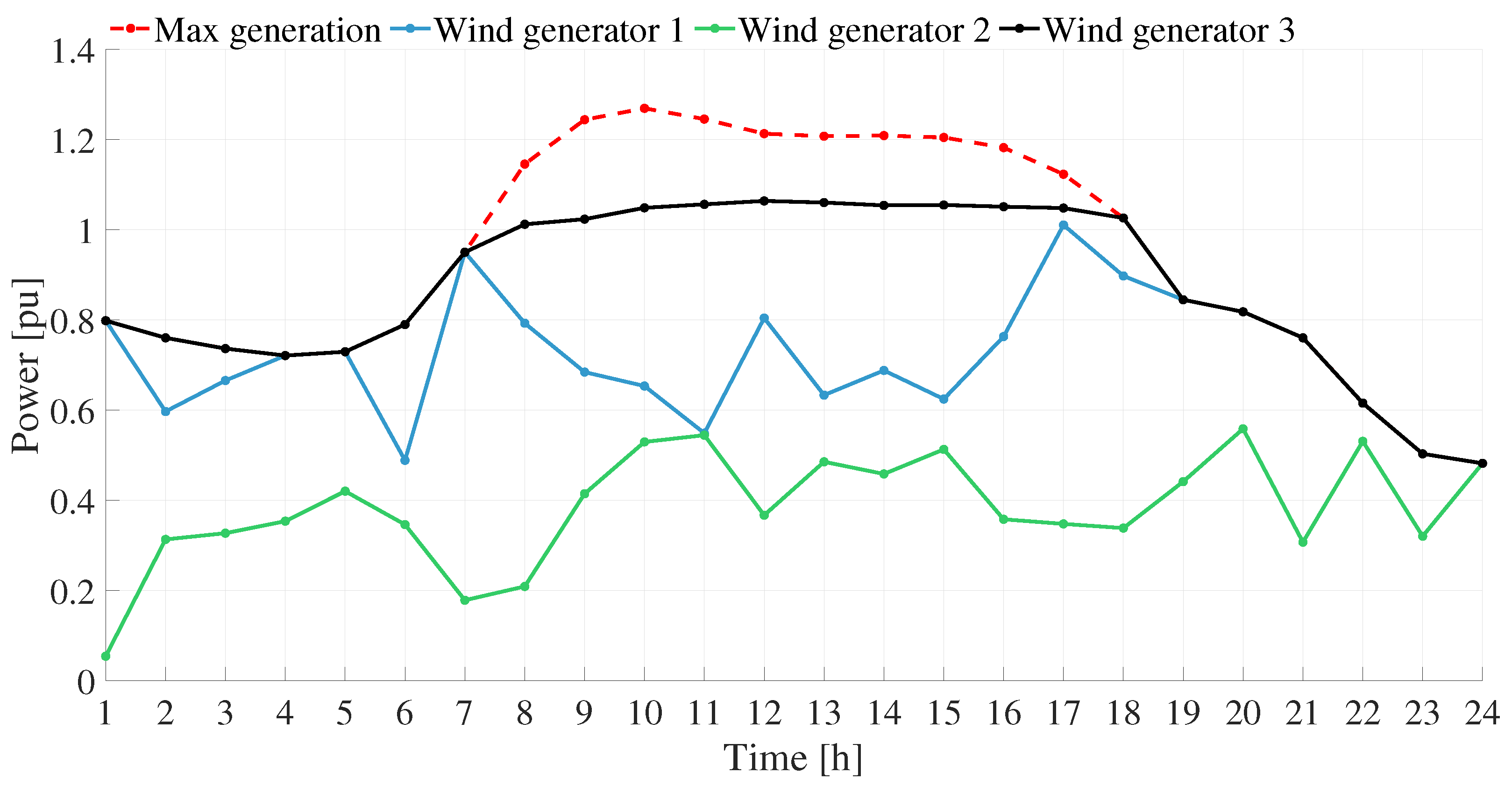
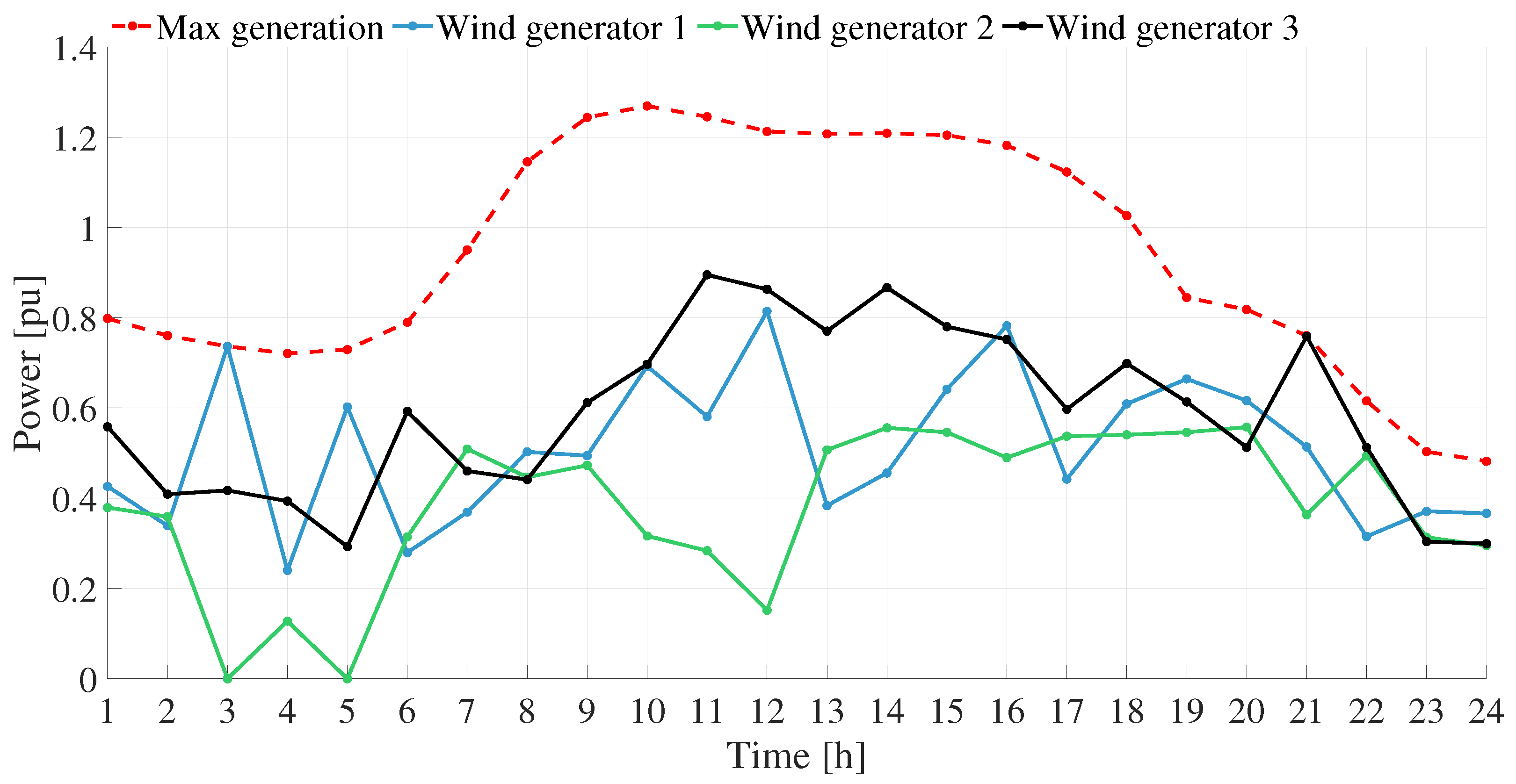
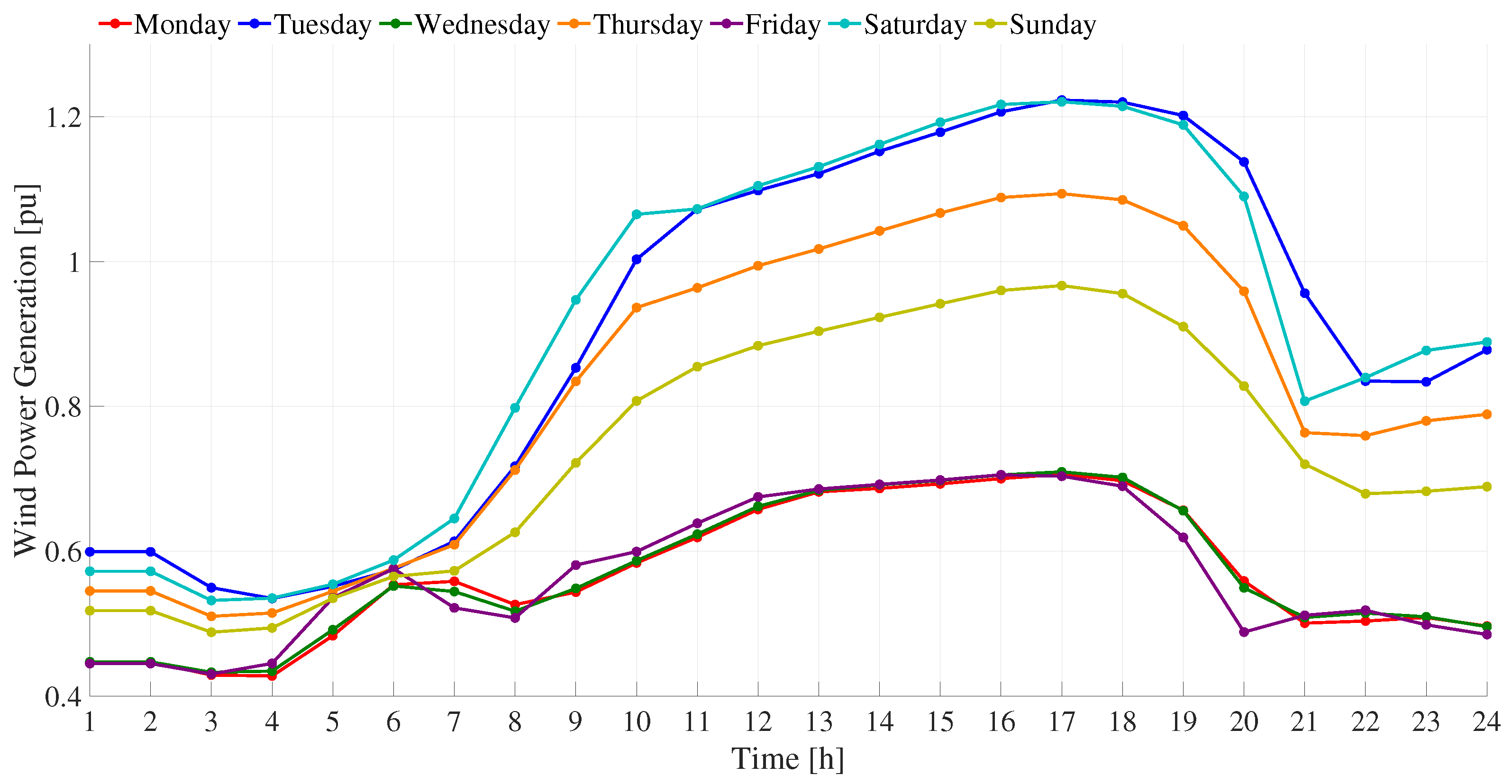
Figure 14 shows the power injected by the WGs during the operating day in on-grid mode. It can be observed that none of the WGs exceed their maximum generation value. The output of each generator varies according to its local wind profile, reflecting the distributed nature of the resource and its influence on system operation.
Between hours 1 and 6, the three WGs exhibit low and fluctuating output, remaining below 0.8 p.u. This period corresponds to low system demand and reduced energy costs, facilitating the charging of BESSs 1 and 3 without significant reliance on wind generation. During this time, WG 3 operates under maximum power point conditions, as its location within the network allows it to exploit the available wind potential fully.
From hours 7 to 12, wind power increases notably. WG 3 reaches stable values close to its upper generation limit, while WG 1 and WG 2 provide moderate but variable outputs. This period coincides with rising demand and energy costs, and the total wind contribution approaches the system’s maximum wind capacity. The increased availability of renewable energy supports the discharge of BESS units and reduces the need for reactive support from D-STATCOMs. However, not all the available wind power is injected into the grid, as the dynamics between generation and demand within the microgrid prevent full utilization of this upper level, reflecting the limitations imposed by local load profiles and operational constraints.
During hours 13 to 18, WG 3 maintains a high and stable output, playing a leading role in sustaining the supply during peak demand. WG 2 and WG 3 continue operating with moderate variability, complementing the overall generation, while WG 1 increases the power level injection. This behavior is consistent with the full discharge of BESSs 1 and 3 and the active operation of D-STATCOM 1 to maintain voltage stability.
In the evening period (19–24), WG 1 and WG 2 show increased fluctuation, while WG 3 gradually reduces its output as wind conditions decline. The total wind power contribution decreases, aligning with a drop in demand and energy prices. During this interval, BESS 2 charges in preparation for the next day, while other units remain inactive or operate minimally.
The behavior of the wind generators directly influences the operational planning of the energy storage systems and support devices. Their hourly generation patterns determine optimal charging and discharging periods, contribute to maintaining voltage levels, and influence energy cost dynamics. The coordinated response of all distributed resources ensures the technical and economic efficiency of the microgrid.
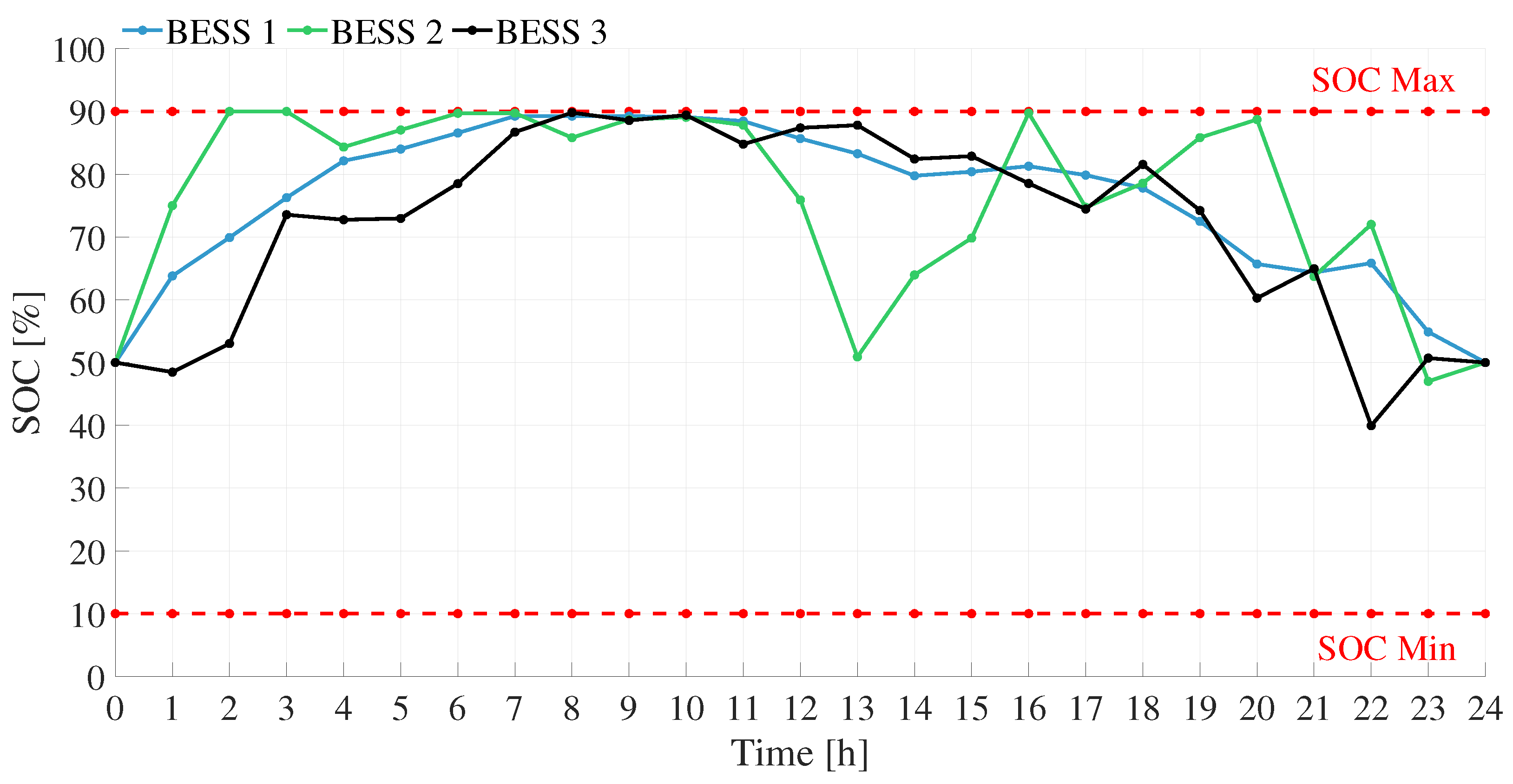
Figure 15 shows the batteries’ state of charge throughout the operating day in on-grid mode. Following IEEE recommendations [
36], the initial SoC and final SoC are set to 50%. During the operating period, none of the established SoC limits are exceeded. This figure shows the state of charge evolution for the three battery energy storage systems (BESS 1, BESS 2, and BESS 3) over 24 h. This behavior is directly correlated with the trends in demand, renewable generation, and variable energy cost, as shown in
Figure 7. The operational strategy follows a coordinated dispatch aligned with the system’s economic and technical conditions.
During the early hours (1–6 h), BESS 1 and BESS 3 rapidly increased their SoC, taking advantage of a low-demand, low-cost, and low-generation scenario. These systems were charged strategically during off-peak hours when energy is cheaper and easier to store. In contrast, BESS 2 maintained a low and stable SoC, remaining inactive in this interval to not increase the total operational cost of the microgrid.
Between hours 7 and 11, when demand and generation peaked, BESS 1 and BESS 3 reached maximum SoC levels and initiated discharge operations. This was executed to inject energy into the system at times of higher cost and higher demand, contributing to load support and cost reduction. BESS 2, however, remained at a low SoC, still not entering into operation.
From hours 12 to 17, the strategy focused on maximizing energy contribution during a period of sustained high demand and elevated energy costs. BESS 1 and BESS 3 actively discharged energy, reaching SoC levels close to the minimum thresholds defined in the model. In contrast, BESS 2 remained in standby mode, conserving its stored energy for a later time window.
At the beginning of the evening (18–21 h), BESS 1 and BESS 3 reached their minimum SoC levels, while BESS 2 began to charge aggressively due to the simultaneous decrease in both generation and energy cost. This recharging occurred during a period of lower demand, reflecting a strategic operational shift to prepare BESS 2 either for the final hours of the current cycle or for early operation the next day.
Finally, during hours 22 to 24, BESS 2 discharged part of its stored energy to support the system under low-generation nighttime conditions. However, as established by the energy management strategy, it did not discharge below the 50% SoC threshold, to comply with the initial energy condition required for the following day. Meanwhile, BESS 1 and BESS 3 remained idle until hour 23, when they began charging in response to the low energy cost. Both systems charged up to the 50% SoC limit defined in the model, ensuring sufficient reserves to initiate operations effectively the next day.
This staggered and coordinated operation among the three BESS units ensures system balance, cost optimization, and effective use of renewable generation. Each storage system operates in different time windows based on its roles and the dynamic conditions of the system.
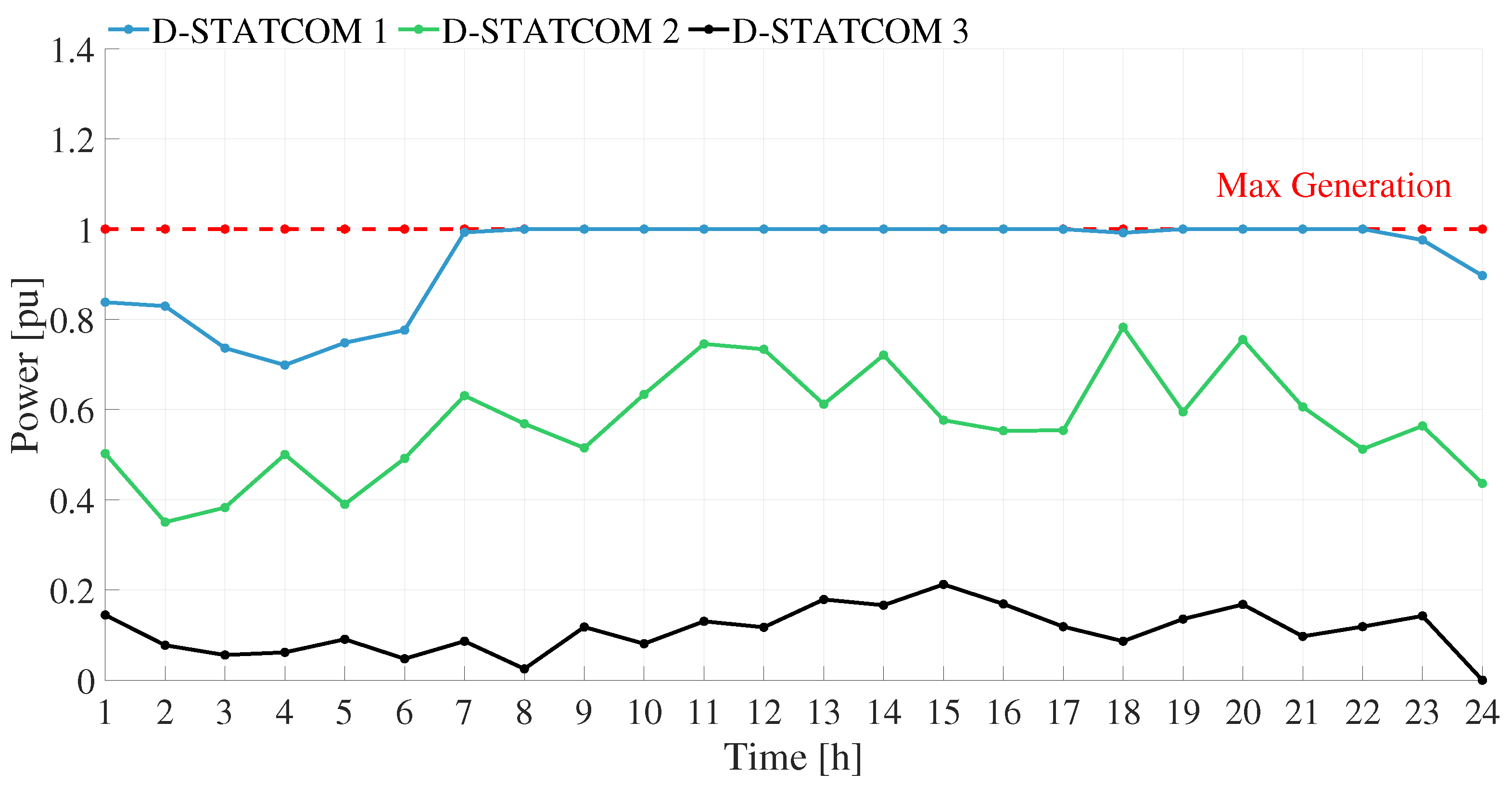
Figure 16 shows the power injected by the D-STATCOMs during the operating day in on-grid mode. All units operate within their predefined power limits (not exceeding 1.0 p.u.), ensuring that voltage regulation and line loading constraints are respected throughout the 24 h cycle.
Between hours 1 and 6, D-STATCOM 1 and D-STATCOM 2 operate at power levels ranging from 35% to 83% of their nominal capacity, while D-STATCOM 3 maintains minimal output. This behavior corresponds to a low and stable demand period, during which voltage regulation requirements are reduced and localized compensation is sufficient to maintain system stability. Notably, D-STATCOM 1, located at the most critical node (node 5) regarding voltage regulation, exhibits the highest compensation levels among the three units, confirming that its placement responds to a higher local need for reactive power support.
From 7 to 12 h, D-STATCOM 1 reaches its maximum output (1.0 p.u.), contributing significantly to voltage control, especially during increasing load and rising energy costs. D-STATCOM 2 also increases its output following load and generation patterns, while D-STATCOM 3 maintains a low but consistent operation.
During 13 to 18 h, demand and cost remain high, and D-STATCOM 1 continues operating near maximum levels. D-STATCOM 2 exhibits a fluctuating pattern, adapting to localized voltage needs, while D-STATCOM 3 contributes modestly. The coordination with the BESS discharge during these hours is evident, as both systems contribute to grid support.
Between 19 and 24 h, the outputs of all D-STATCOMs decrease progressively, aligned with the drop in demand and energy cost. D-STATCOM 2 shows an operational peak near hour 20, likely responding to localized loading effects, while D-STATCOMs 1 and 3 gradually reduce their injection.
The D-STATCOMs operated within their nominal limits throughout the cycle, demonstrating technically adequate performance. However, the observed dynamics revealed that, although they performed as efficiently as possible, their size and location within the network directly influenced their operational scheme. Their activation patterns were driven by load distribution, each device’s specific location and capacity, and the need to maintain voltage levels and line loading within permissible limits. This behavior is directly influenced by the operation of distributed generation, the coordinated charging and discharging of battery storage systems, and the hourly evolution of demand. The interaction among these DERs demonstrates that their combined operation must be analyzed as a correlated system, where the performance of each component affects and complements the others to ensure overall grid stability and optimal operation.
5.4.2. Off-Grid Case
In this subsection, the behavior of all power devices is analyzed, along with the voltage and current constraints associated with microgrid operation.
Figure 17 displays the maximum voltage variation across the system’s nodes over 24 h, operating in off-grid mode. Notably, at no point do the recorded voltages exceed the predefined limits.
Regarding
Figure 18, the maximum ampacity of the lines during the operating day in off-grid mode is depicted. It is important to note that, under no circumstances, do the lines exceed their maximum capacity limit.
Figure 19 displays the power supplied by the WGs during the operating day in off-grid mode. It is highlighted that none of the WGs surpass their maximum generation capacity.
In islanded mode, the wind generators exhibit a more irregular operating profile and lower utilization of their maximum generation potential, as observed in
Figure 19. During hours 1 to 6, all three generators operate at low power levels with high variability. WG 2, in particular, shows near-zero output at several points. This behavior reflects not only fluctuating wind conditions at each generator’s location but also the operational constraints of the islanded mode, which lacks the flexibility of a main grid to absorb surplus energy.
Between hours 7 and 12, although the available wind potential reaches its peak (as indicated by the “Max generation” curve), the actual output of the generators remains well below this maximum. WG 3 achieves relatively stable generation, while WG 1 and WG 2 continue to operate intermittently. The mismatch between generation and demand prevents full utilization of wind resources, as the microgrid must maintain instantaneous power balance without external support.
From hours 13 to 18, generation levels stabilize slightly. WG 3 maintains high output, while WG 1 and WG 2 show moderate contributions with continued fluctuations. This period coincides with peak demand, and the generators operate in coordination to meet system needs, though their output is still limited by technical and locational constraints.
In the final hours of the day (19 to 24), overall wind generation decreases. The decline in wind availability and lower demand levels lead to reduced output from all generators. WG 2 again drops to minimal values, while WG 1 and WG 3 operate near their lower generation levels.
This behavior highlights the operational limitations of wind generation in isolated microgrids. The absence of grid support restricts the ability to absorb surplus energy, resulting in the underutilization of renewable resources. Compared to the grid-connected mode, where wind generators maintain more stable and higher outputs, the islanded scenario reveals the importance of strategic energy storage deployment to buffer variability and enable efficient use of distributed generation.
Regarding
Figure 20, the state SoC of the system’s batteries during the operating day in off-grid mode is illustrated. An initial and final SoC of
is assumed. Throughout the operating period, it is evident that none of the defined SoC limits are exceeded.
Figure 20 presents the state of charge profiles of the three battery energy storage systems (BESSs) operating in islanded mode. All units begin the day at 50% SoC, as defined by the system’s energy management policy, and it is evident that none of the defined SoC limits are exceeded. Throughout the first hours (1–6 h), BESS 1 and BESS 3 increase their charge rapidly, reaching values close to the maximum threshold (90%), while BESS 3 follows a more gradual charging pattern.
Between hours 7 and 12, all BESS units maintain high and stable SoC levels, with no significant discharge events. This reflects a conservative operational strategy aimed at preserving energy reserves, considering the system operates without external backup.
During hours 13 to 20, a progressive discharge is observed in BESS 1 and BESS 3, while BESS 2 undergoes a deeper discharge followed by a charging phase, contributing to the dynamic balance of the microgrid and taking advantage of the available renewable energy. Despite these variations, none of the units reach the minimum SoC limit. The strategy prioritizes maintaining sufficient stored energy to face potential fluctuations in demand and renewable generation. Finally, during the last hours of the day (21–24 h), a slight reduction in SoC is observed, and all BESS units reach the target level of 50%, ensuring readiness for the following day’s operating conditions.
In comparison,
Figure 15 shows the SoC behavior of the same BESS units under grid-connected conditions. In this case, the batteries exhibit a more dynamic profile. BESS 1 and BESS 3 charge during low-demand, low-cost periods and discharge fully during peak hours, even reaching the minimum SoC limit. BESS 2 operates later in the day, charging strategically in the evening and ending the cycle at 50%.
The key difference between both modes lies in the presence of a variable energy cost signal in the grid-connected scenario. This economic reference allows for a more flexible and optimized use of storage resources, enabling deeper discharges and better alignment with system needs. In contrast, islanded mode requires greater operational caution. The absence of price signals forces the system to rely solely on technical variables, such as demand, generation, and SoC, for decision-making, which reduces responsiveness and increases operational complexity.
Figure 21 shows the hourly power injection of the three D-STATCOMs under islanded operation. In this mode, the three units operate below their nominal capacity at all times, with fluctuating outputs that respond to local voltage regulation needs. D-STATCOM 1 and D-STATCOM 2 exhibit higher variability, with power levels generally between 0.25 and 0.83 p.u., while D-STATCOM 3 operates with lower and more stable outputs, consistently below 0.4 p.u.
This behavior reflects the localized and demand-dependent nature of voltage support in the absence of grid coupling. Without external regulation, each D-STATCOM adapts dynamically to maintain voltage stability and manage line loading based on the operating conditions of its respective node.
In comparison, under grid-connected conditions (
Figure 16), D-STATCOM activation is more structured and aligned with system-wide power flows and reactive compensation strategies. In that case, the control scheme allows better coordination between D-STATCOMs and other distributed energy resources, optimizing their use during high-load or high-cost periods.
The islanded scenario reveals the increased complexity of maintaining voltage profiles without centralized coordination. It also highlights the importance of strategic placement and sizing of D-STATCOM units, as their effectiveness is more dependent on local conditions in the absence of grid support.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}