
Development of a Network-Level Road Safety Assessment Procedure Based on Human Factors Principles



Abstract
1. Introduction
1.1. Network Safety Assessments
1.2. Human Factors
1.3. Research Objective and Overcoming the Gaps
- -
- During the first step of the procedure, the evaluation of Potentially Critical Locations (PCLs, see Section 2.2.2) was made without following a systematic procedure and was made only considering all different expectation-related aspects together (i.e., general expectations, punctual expectations, and visibility), with a high possibility of subjective judgments.
- -
- During the second step, the Human Factor Tool from PIARC [51] was used with only a few adjustments for the score calculation.
- -
- The procedure was applied to three road stretches.
- -
- Consider a systematic and automated process to ensure an objective and fast first screening of the PCLs. This assures the reduction in time required to analyze all the PCLs in the second step.
- -
- Improve the Human Factor Tool by introducing and modifying some requirements, developing guidelines for its application (achievable in the material attached to the paper), and developing a digital tool (in Excel) to expedite its application.
- -
- Apply the procedure to the already analyzed stretch (for a comparison of the results) and three new stretches.
2. Materials and Methods
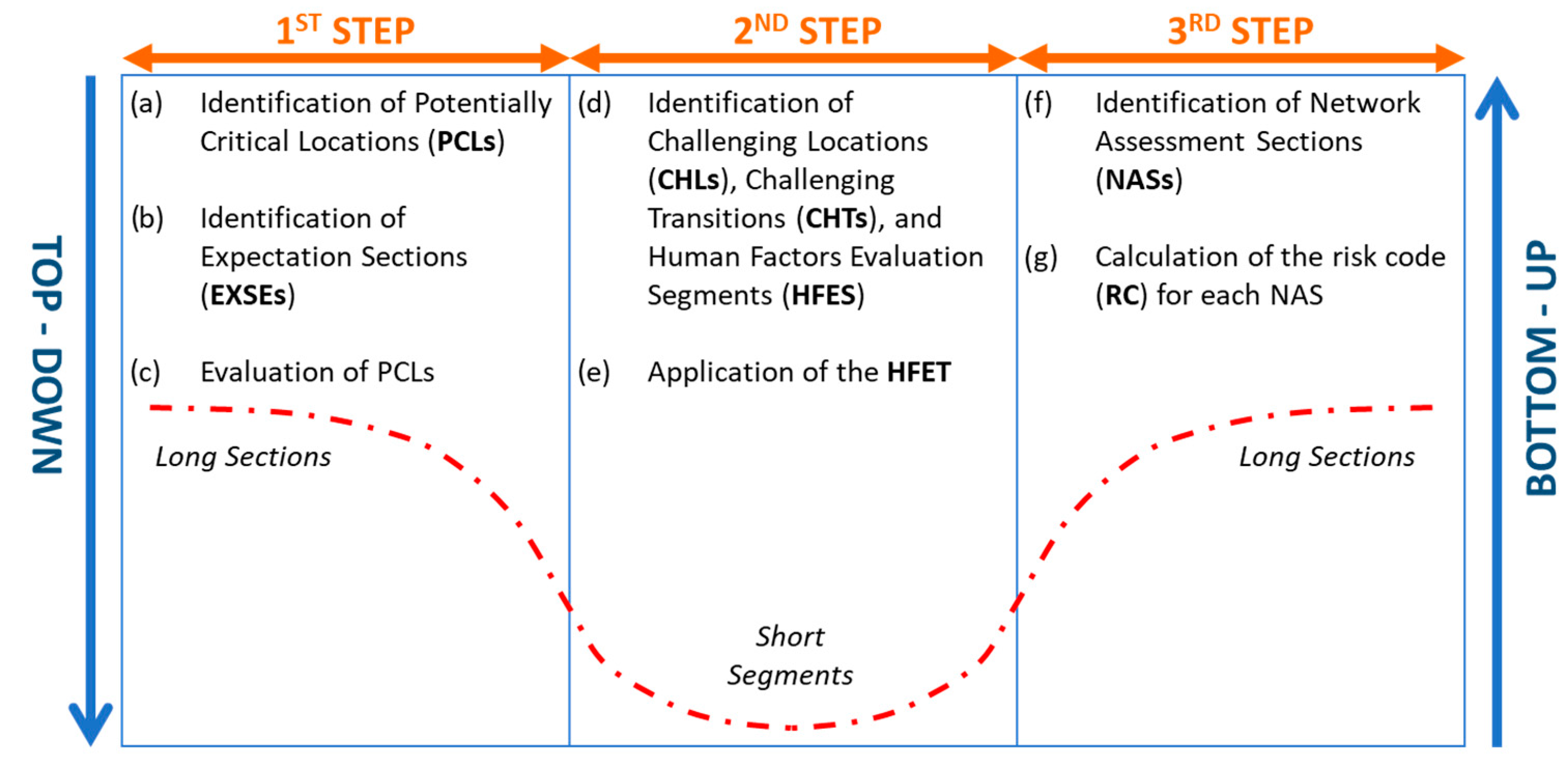
2.1. Structure of the Procedure
2.2. Step 1 of the Procedure
- -
- GEX: how the PCL is expected considering the EXSE to which it belongs (e.g., a pedestrian crossing cannot be expected within a forest where no buildings are visible);
- -
- VIS: evaluate if sufficient decision sight distance is present based on the expected speed and alertness that the driver is expected to have while driving that specific EXSE that includes the analyzed PCL (the driver needs more time to see, understand, and react to the pedestrian crossing considered in the previous example);
- -
- PEX: punctual expectations generated by the specific configuration of the road and the field of view close to the PCL; they are evaluated through fast visual inspection of the road by human factors experts. Contrary to GEX and VIS, which can be calculated, PEX is derived from the qualitative judgments of inspectors. For this reason, only two levels of risk are considered for PEX, which means: “some main issues are present” (high risk level) or “no or very low issues are present” (low risk level).
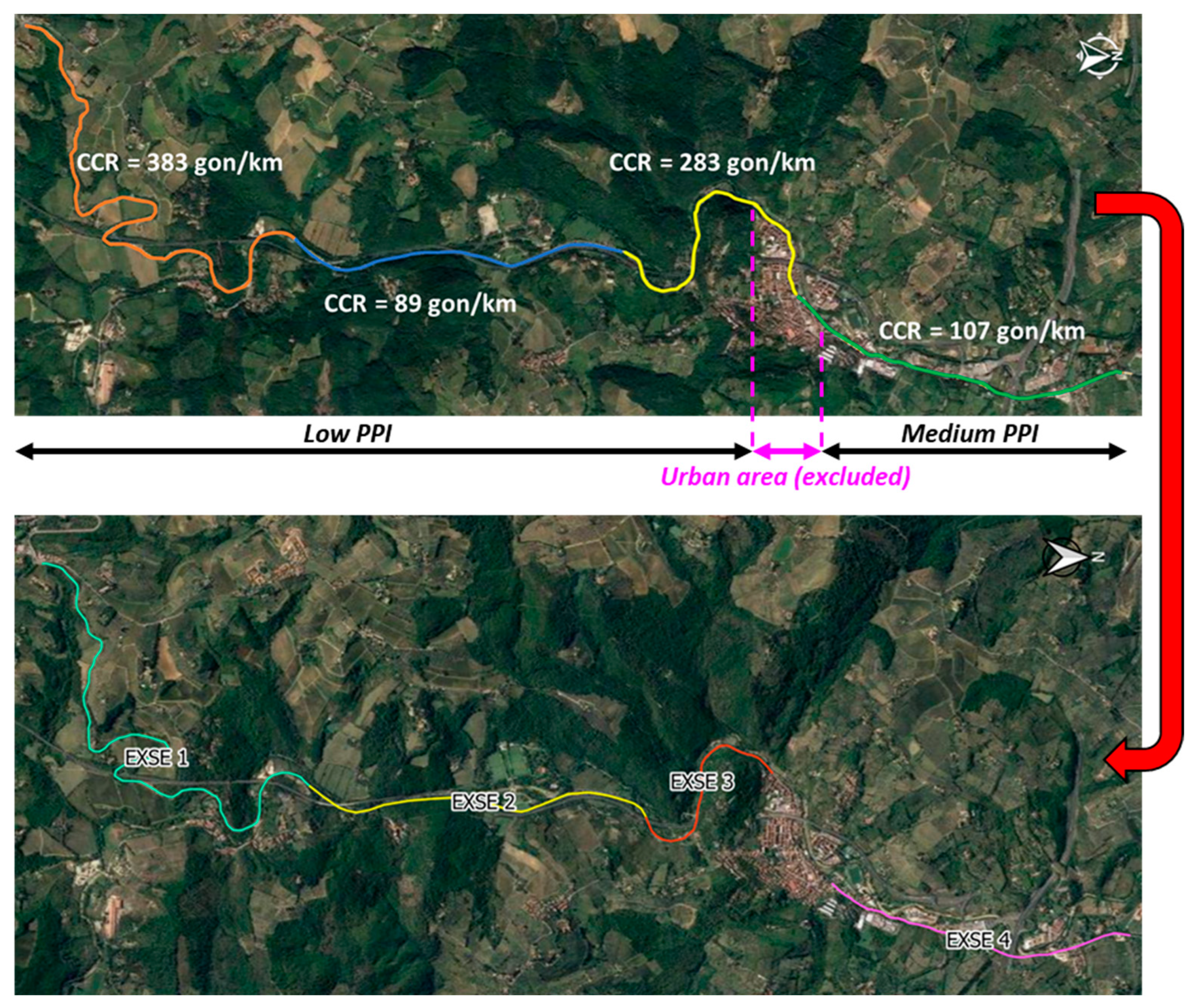
2.2.1. Identification of PCLs and EXSEs
- CCR = curvature change rate [gon/km];
- γi = angular change of the geometric element “i” [gon];
- Li = length of the geometric element “i” [km];
- n = number of geometric elements of the road section (tangents, circular curves, spirals) [-].
- High winding: CCR > 350 gon/km;
- Medium winding: 350 gon/km > CCR > 160 gon/km;
- Low winding: CCR < 160 gon/km.
- Low level: only rural areas can be considered at a low level. A low level means very few or no perceived possible interactions. The surrounding environment is almost natural, without any trace of anthropization, if not the road itself.
- Medium level: this level represents the upper level of rural areas. Such PPI is often representative of suburban areas, where the density of houses and commercial activities is reduced. Medium level can also address rural road stretches that pass through small villages or groups of houses along the road or which pass through an area with many driveways and at-grade intersections due to the presence of many activities and factories.
2.2.2. Evaluation of PCLs
GEX Evaluation
VIS Evaluation
- D2 = threshold distance between the medium and low VIS level [m];
- t2 = 6 for low alertness, 5 for medium alertness, and 4 for high alertness [s].
- D1 = threshold distance between the medium and high VIS level [m];
- t1 = 4 [s].
PEX Evaluation
2.3. Step 2 of the Procedure
- Identification of CHLs;
- Identification of CHTs and HFES;
- Application of the HFET.
2.3.1. Identification of CHLs
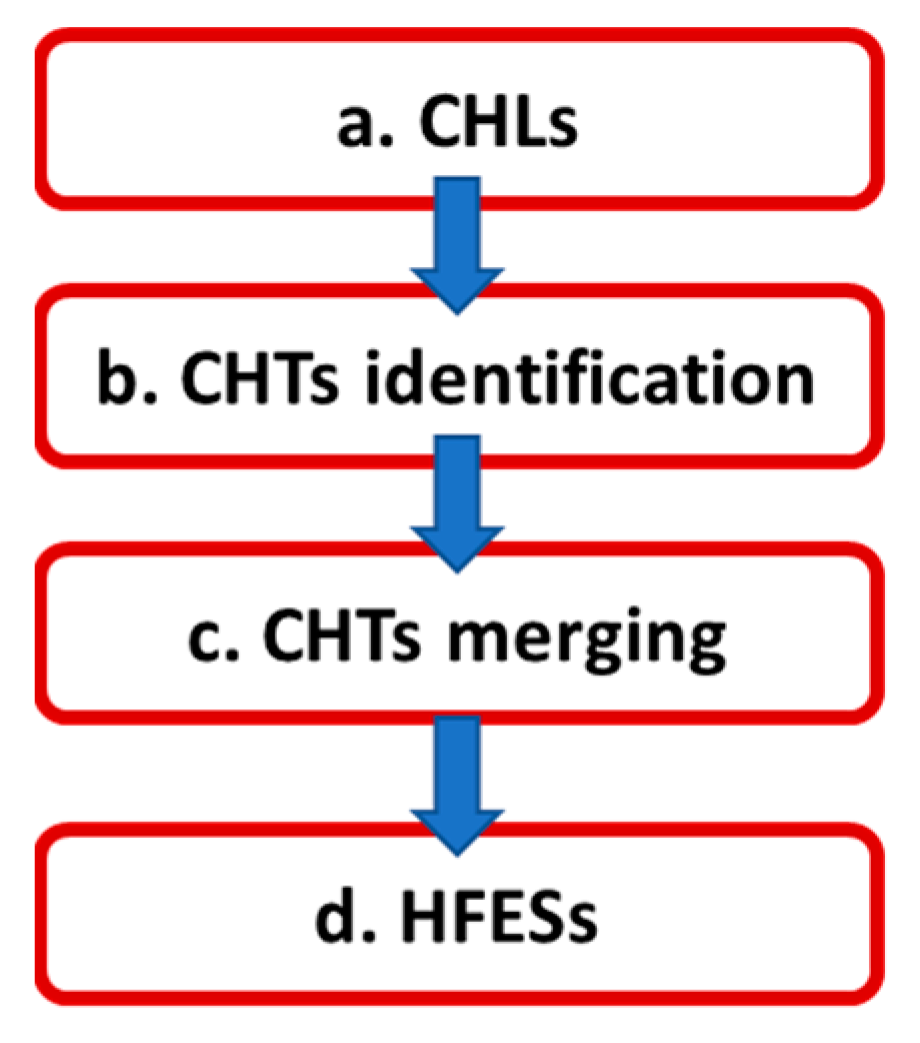
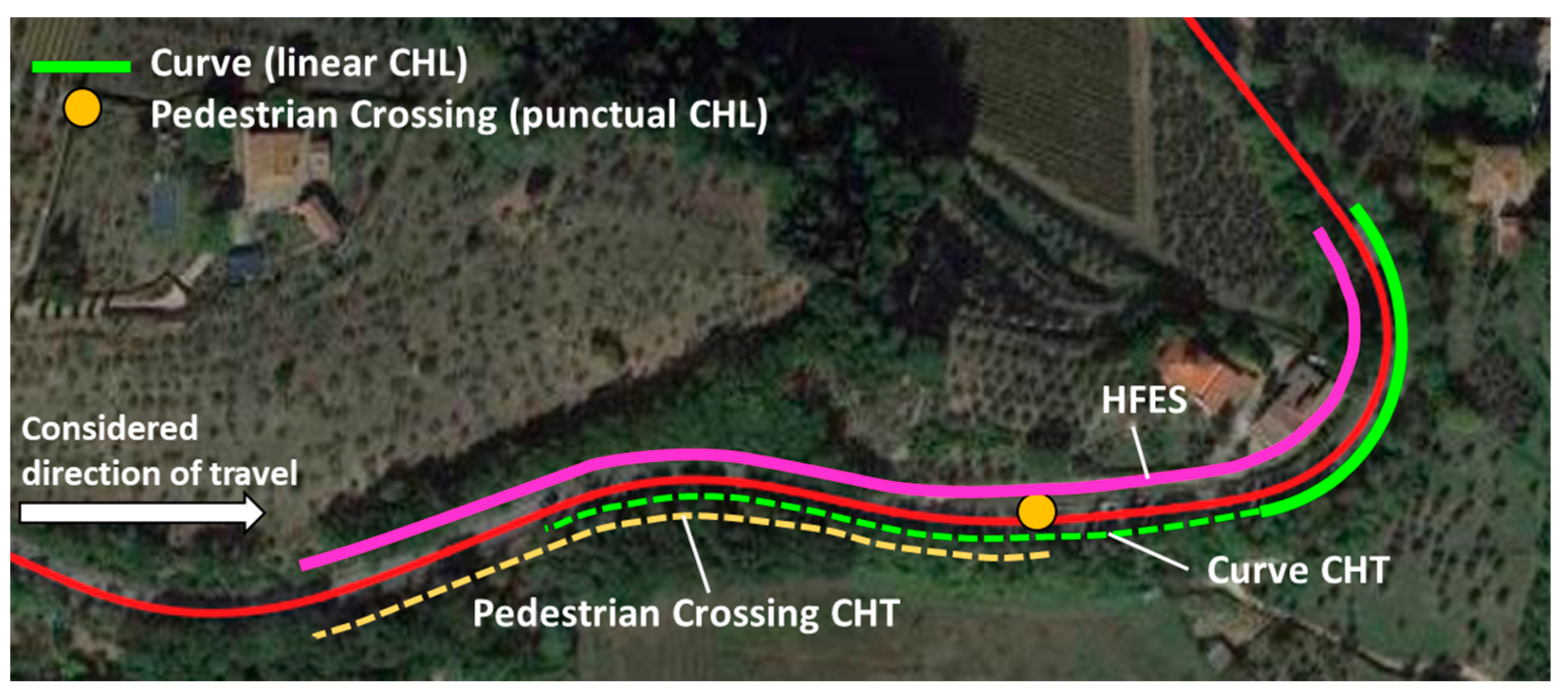
2.3.2. Identification of Challenging Transitions (CHTs) and Human Factors Evaluation Segments (HFESs)
- DCHT = distance traveled in 10–12 s [m];
- t3 = 10–12 [s].
2.3.3. Application of the Human Factors Evaluation Tool (HFET)
2.4. Step 3 of the Procedure
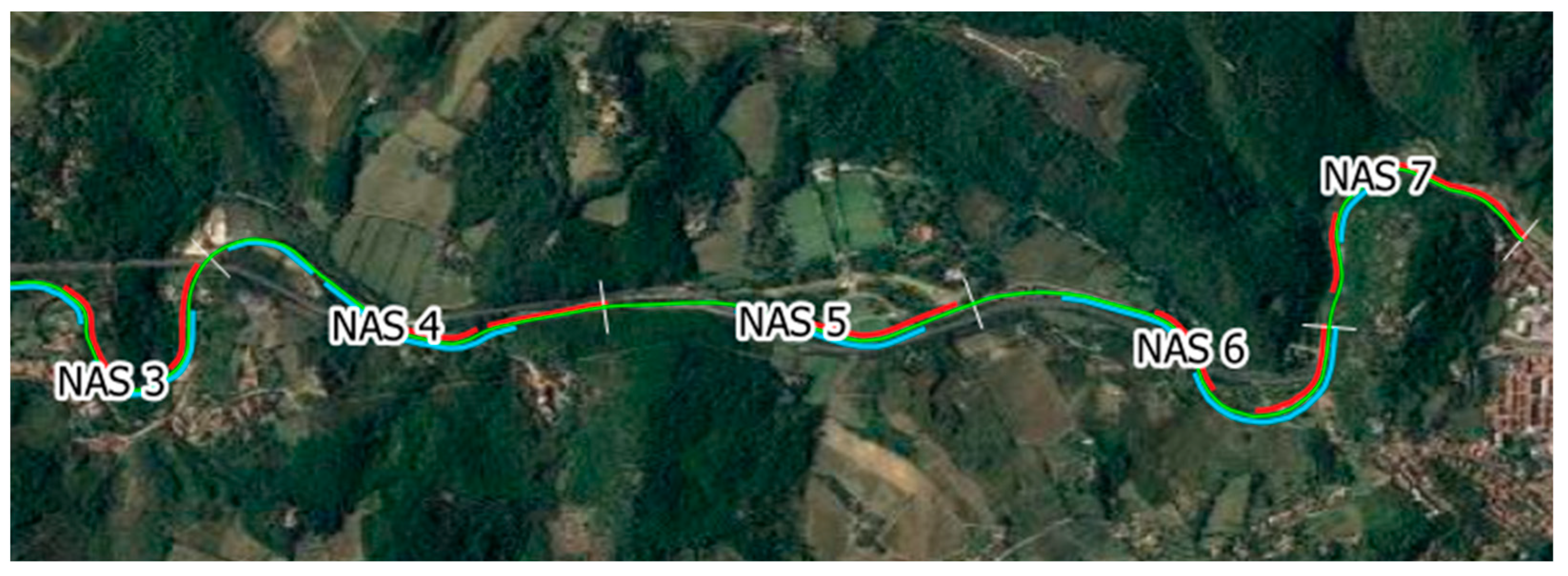
- Identification of NASs;
- Calculation of the Risk Code (RC) to assign to each NAS.
2.4.1. Identification of NASs
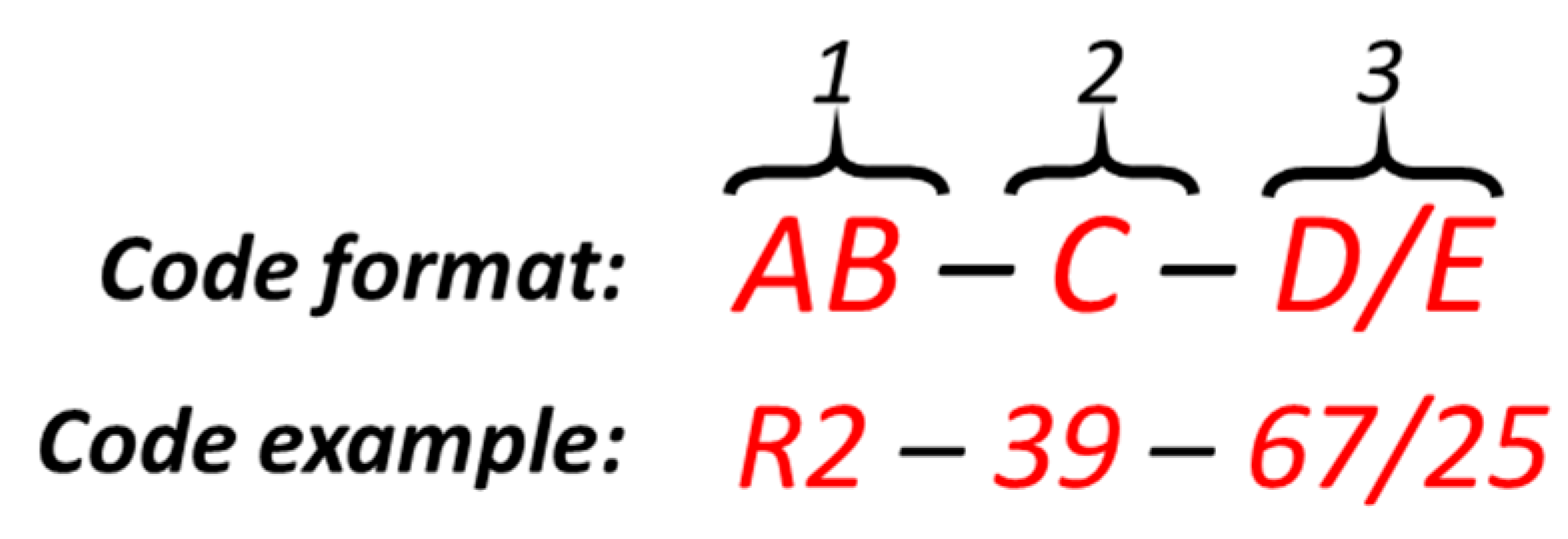
2.4.2. Calculation of the Risk Code (RC)
- A = letter representing the worst level of HFS present, including the HFS for each rule and the Total HFS (R = red, at least one score < 0.40 within the rules; Y = yellow, no red scores, and at least one score < 0.60 within the rules; G = green, all other results), for both directions;
- B = The number of results of level “A” (see before), considering the worst results of the HFSs for each rule and the Total HFS (min = 0, max = 4);
- C = The worst total result within the NAS;
- D = Weighted Average of the Total HFS and length of each HFES and INCS;
- E = Standard Deviations of the Total HFS of each HFES and INCS, considering the segment length.
- Very high risk: “AB” part of the code is equal to “R4”;
- High risk: “AB” part of the code is equal to “R2” or “R3”;
- Medium risk: “AB” part of the code is equal to “R1” or “Y4”;
- Low risk: all the remaining cases.
2.5. Validation of the Procedure
2.6. Repeatability
Calculation of the AR and AR levels
- AR = accident rate [accidents/(km × Mvehicles)];
- n = number of accidents in the analysis period [accidents];
- L = segment length [km];
- AADT = average annual daily traffic value in the analysis period [vehicles/day].
- ARi < ARmin = low risk level;
- ARmin < ARi < ARmax = medium risk level;
- ARi > ARmax = high risk level.
- K = constant of Poisson probability distribution function, taken as 1.282 (confidence interval of 90%) [58];
- ARm = the average accident rate of the analyzed site (e.g., road stretch) calculated with Equation (8).
- Mi = the exposure momentum calculated with (9) for section “i”.
- np = total number of accidents that occurred in the considered period “p”;
- t = total number of sections in the analyzed site;
- Li = length of the “i” section;
- AADTi,p = average annual daily traffic of section “i” in the whole considered period “p” (sum of the AADTi of each year).
2.7. Consistency
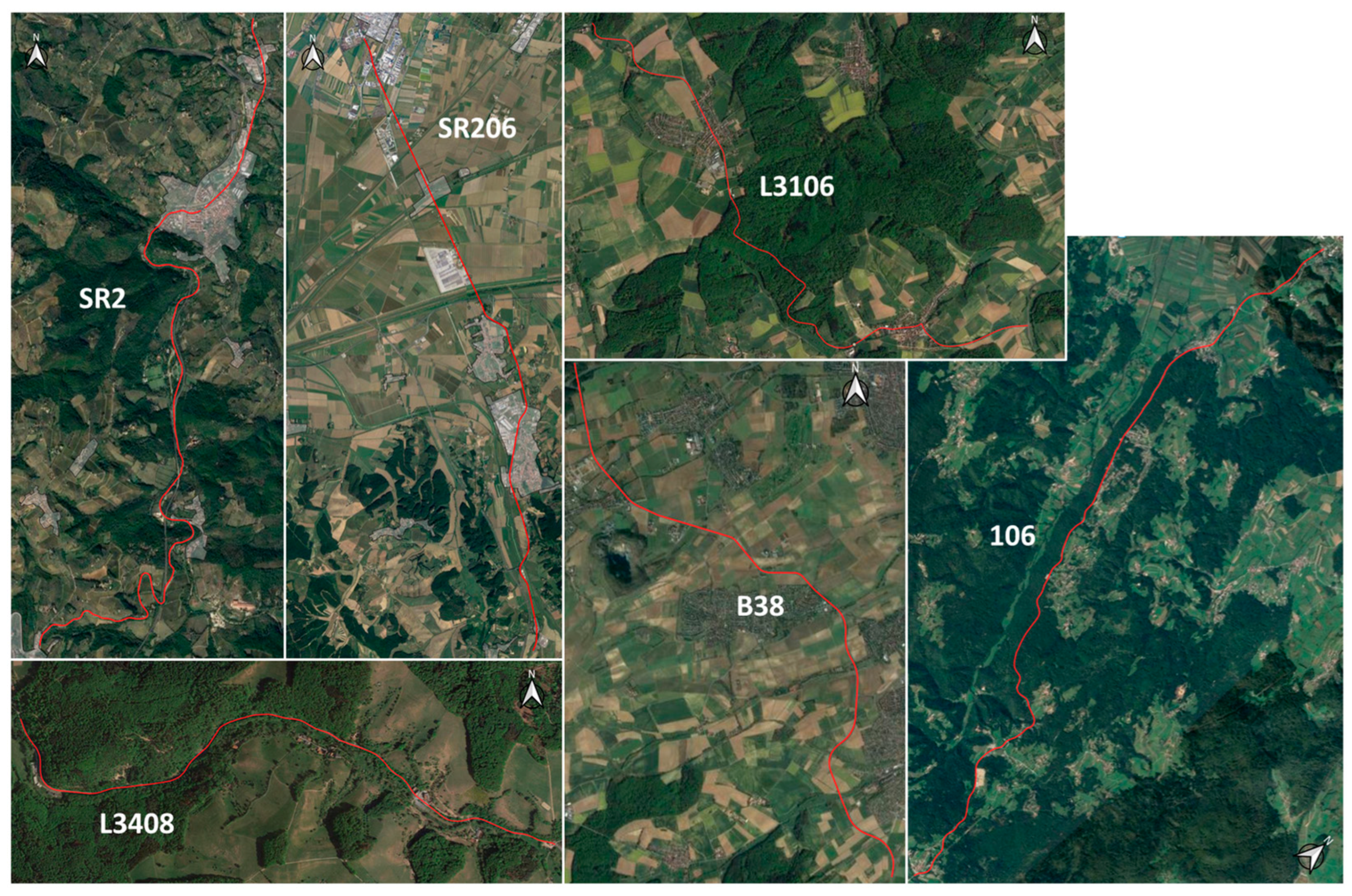
2.8. Test Roads
3. Results
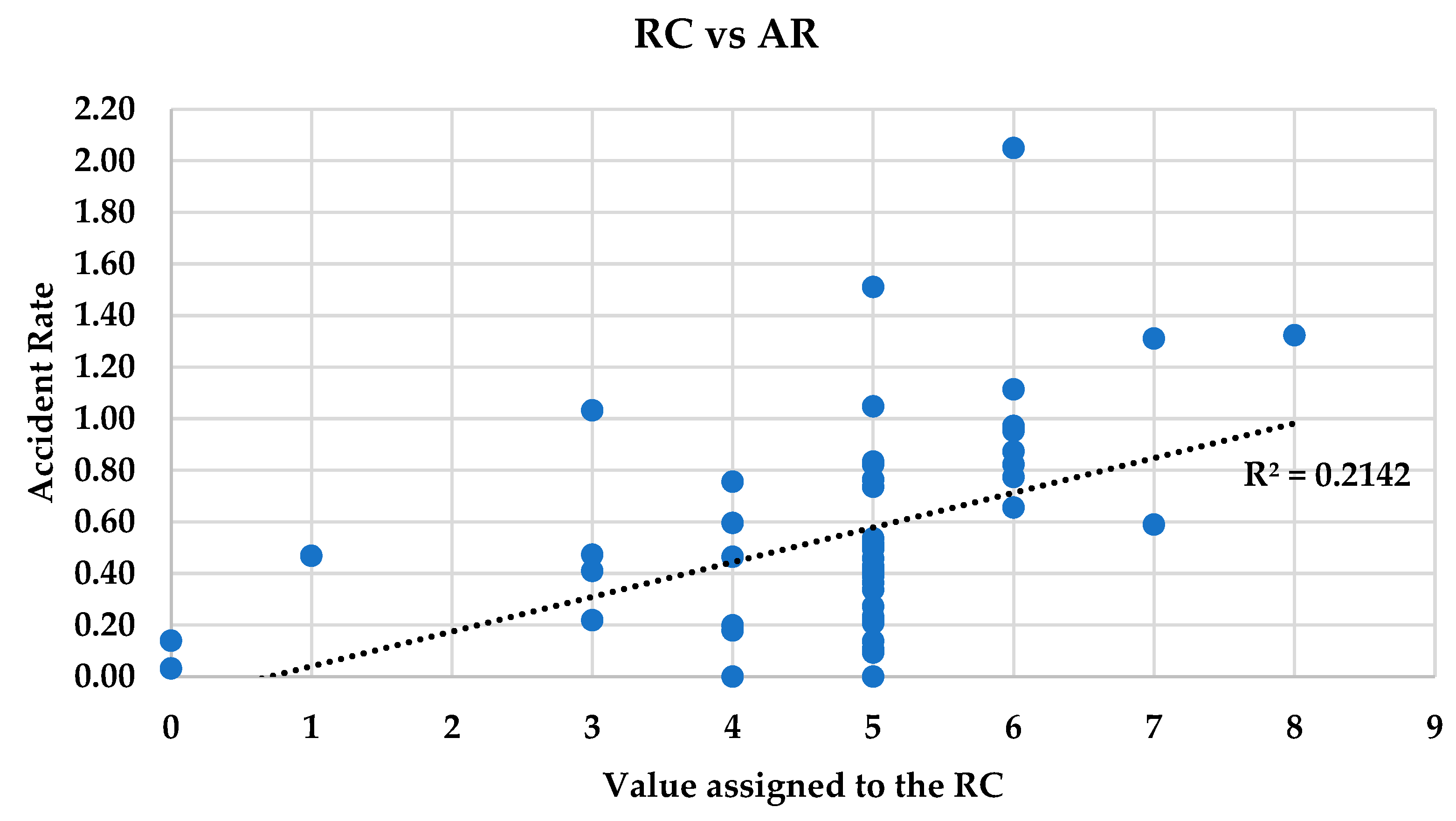
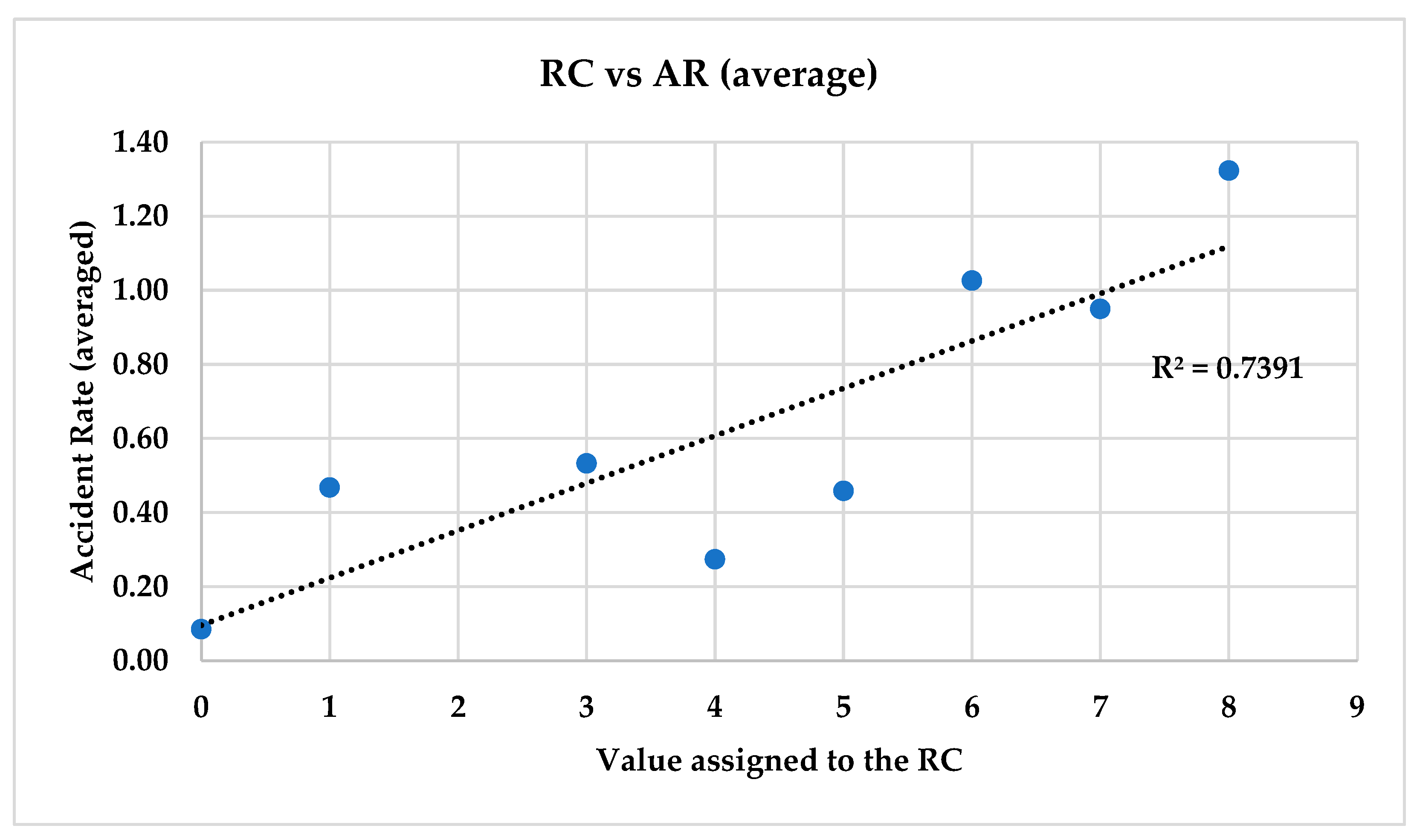
3.1. Main Results
- Freeman–Halton extension of Fisher’s test: p-value significance of 0.004 < 0.05; thus, the null hypothesis that the variables assume these risk levels by chance can be rejected;
- Kendall’W of 0.78, with a p-value of 0.001 < 0.05; thus, the null hypothesis that the variables assume this ranking by chance can be rejected.
3.2. Repeatability
3.3. Consistency
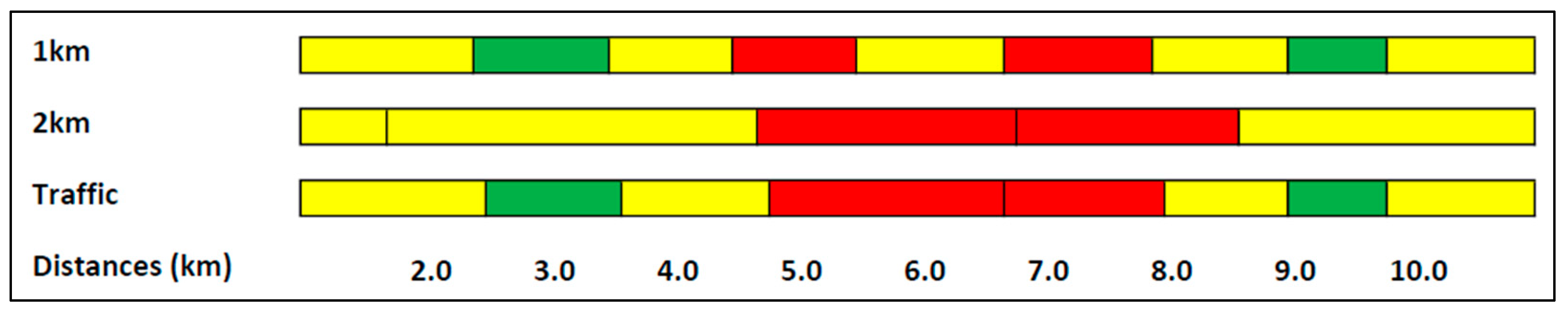
- NAS length is related to the HFESs. Sometimes, it is not easy to define short sections (e.g., 1 km), and sometimes, it is not easy to define longer sections (e.g., 2 km). For this reason, the results should be consistent, even if NASs sometimes have a length that differs much from the reference one.
- When a lack of traffic data is present or when traffic is constant for a long stretch, NAS defined, considering traffic, may become very long, missing much of its significance. This is the case of road SR2. In this case, even if traffic is chosen as a reference for NAS segmentation, it is suggested to consider a maximum section length (2 km is suggested).
- It has been confirmed that longer NASs are likely classified as riskier than shorter NASs because they may include more “red results” (high risk) from the HFESs. However, the choice of considering the most critical results within the section to provide the RC for the section has been made during the development of the procedure to ensure that the presence of high-risk HFESs is never hidden. This is very important; otherwise, some risky sections could be underestimated.
4. Discussions and Conclusions
- This research provides a validated instrument that analyzes the road using human factors. Such an instrument is innovative and highly required because most accidents occur because of human errors induced by the road.
- It has been found that it has a high capacity to identify dangerous locations. The comparison with accident-based analysis shows a good statistical correspondence between the results. An average of 56% of NASs were considered with the same risk level for both analyses. Considering only two levels, sections that require intervention (high risk) and sections that do not require intervention (low and medium risk), the concordance rises to 81%. Overall, statistical analysis also demonstrates that such concordance is significant.
- This procedure overcomes many of the segmentation issues that always burden road safety analysis. Those issues are very common in standard RSI analysis and accident-based analysis. This has been performed while considering different segmentations for different types of analysis (step 1, step 2, and step 3 of the procedure). In steps 1 and 2, the segmentation is linked to the specific issues that need to be analyzed, while in step 3, the segmentation is made while considering the most efficient way for road agencies to use the results on a network level.
- It is a proactive procedure because accident data are not required. Thus, it can be applied to those road stretches for which no accident data are available or when accident data are not reliable.
- It provides information about the specific risks of the road, aiding in the decision of possible interventions (in step 2, it provides a detailed analysis of the issues of the segment).
- It does not need much data, and the data needed can be easily found.
- It allows the definition of intervention priority. The calculated RC allows the identification of four levels of risk and the order of the NAS within those levels from the most critical to the least critical.
- It proves to be repeatable and easy to implement after short training courses. This has been proven by the application of the procedure from a different inspection team that was trained in human factors principles. The training course was a two-day course.
- Despite an overall good concordance between the results, some sections show differences in the evaluation. Thus, a detailed analysis of those sections must be carried out with detailed inspections and/or the accidents of the successive years monitored.
- Identifying EXSEs is a crucial task. The application of the procedure from a different inspection team shows that when longer sections of the road are considered, the PPI level can be ambiguous. Different evaluations of PPI are reflected in the evaluation of PCLs, both concerning GEXs and VISs. However, if an EXSE is judged as “medium” PPI instead of “low”, but the winding level is the same, the risk of missing information is moderate, and medium-level CHLs are likely missed. On the opposite, if the PPI is judged as “low” instead of “medium”, no information is missed, but more CHLs are identified with some additional computing time while applying the HFET.
- Subjective judgments of PEX. Even if references and short checklists have been provided to evaluate PEXs, the judgments are still subjective; thus, different results in the evaluation may occur. However, the procedure shows that those differences are few. Moreover, the choice of giving greater importance to the most critical result for evaluating HFESs and NASs allows for the reduction in error of PEX judgments in step 1. That is because very critical locations for PEX are likely identified by all inspectors. The main difference in the evaluations is related to locations around the “medium level” because they can be ambiguous, and the inspector cannot be sure if they must be selected or not.
- Limited sample for the study. Despite the overall good results, additional tests should be made considering additional road stretches and additional inspector groups.
- The procedure must be tested strongly against the inspector’s subjective judgments. Also, in this case, this research provides a first important step in that direction, but to be sure about the reliability and repeatability of the procedure, more inspectors should apply it to the same road (and also to others), and the results of the judgments should be compared.
- The procedure is consistent against different NAS segmentations when considering the capacity to identify the most critical section of the road. On the other hand, when very long sections are considered, the probability of section risk overestimation increases, thus reducing the consistency of the overall judgment. For these reasons, a maximum length of 2 km is suggested. This measure should be validated in subsequent experiments.
- It must be remembered that this procedure focuses on the identification of road stretches that are prone to cause accidents. Thus, it identifies those points of the road where an accident can likely occur. It does not consider the consequence of an accident; hence, it does not consider the severity of an accident. For this reason, to have a comprehensive analysis of all the safety aspects of the road, this procedure should be complementary to some others that can identify how severe the possible outcome could be.
- The procedure does not account for the influence of traffic; thus, it cannot provide an index of risk accounting for the number of vehicles traveling along the stretch. However, this is only a partial limitation. The proposed procedure has been developed to analyze the safety level of a road without considering traffic exposure. The results from the procedure identify the risk of a single vehicle driving along the road to incur an accident because road-induced driver behavior does not comply with the road characteristics. This value of risk is fixed for a specific road stretch based on its characteristics.
- The resources necessary to carry out the procedure on a network range. The application of the procedure requires time and trained inspectors. Fast analyses that consider only observed accidents are easier to implement.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Acronyms and Definitions
- Segment: a part of a road of short length (generally within 1 km), which is part of a section;
- Section: a part of a road of medium length (generally more than 1 km), which is part of a stretch;
- Stretch: a part of a road that spans several km.
| Term | Meaning |
| AADT | Annual Average Daily Traffic. |
| AR | Accident rate. |
| CHL | Challenging Location. CHLs are PCLs that are not clearly perceived by the driver, because of some problems concerning VIS, GEXs, and/or PEXs. The consequence is that the driver does not change his driving program, or tries to change it too late, causing hazardous maneuvers. |
| CHT | Challenging transition. This is the area preceding and including the CHL. |
| EXSE | Expectation Section. A road section where the driver has specific similar driving demands, like a curvy section with similar radii, or an interurban section with a logical consistency to its design elements and speed. At the same time, the roadside gives the driver a consistent impression that contributes to their overall impression of the road section. So, the driver will build up, subconsciously, a specific expectation of how the road alignment will develop and which driving program is appropriate. |
| GEX | General Expectations. Expectations the driver has about the road, derived from previous experience: both life experience (e.g., road type) and “last km” experience (based on the characteristics of the last km of the road traveled). |
| HFES | Human Factors Evaluation Segment. An HFES is composed of a sequence of consecutive and/or overlapping challenging transitions that are merged. |
| HFET | Human Factors Evaluation Tool. This allows us to evaluate the compliance of the road characteristics to the human factor demand. |
| HFS | Human Factors Score. The result, in percentage, of the application of the Human Factors Evaluation Tool. It is called the HFS both in the results of the First, Second, and Third Rule and the Sum of all the Rules. |
| INCS | Inconspicuous Segment. Part of a road section that is easy to drive and without any obvious design deficiencies or human factors deficiencies. It does not have to be evaluated with the Human Factors Evaluation Tool. |
| NAS | Network Assessment Section. This section is considered to provide the result of the procedure. The whole analyzed network will be divided into many NASs. NASs will be the element to which the road agency will refer to decide where to intervene. NASs may include many HFESs. |
| NSA | Network safety assessment. |
| PCL | Potentially critical location. Any area where drivers must adapt their driving program by changing their speed, braking, steering, or changing lanes. Normally they are junctions, intersections, stops for public transport, exits, driveways, curves, carriageway-width reductions, or pedestrian/cyclist crossings. |
| PEX | Punctual expectation. Expectations the driver has about the road, derived from the surrounding location: the punctual road image (and the Gestalt) creates specific expectations about the specific location. |
| PPI | Perception of possible interaction. This is a quantification of how the road layout shows possibilities for interactions with other road users (e.g., the presence of intersections, accesses, and pedestrian crossings). |
| RC | Risk code, which summarizes the outcomes of the application of the procedure for each NAS. |
| RSIs | Road safety inspections. |
| VE | Expected speed has been introduced to provide a range of possible speeds for an EXSE. Based on the EXSE’s characteristics it is expected that drivers traveling the EXSE will hold a speed within the range of the VE. |
| VIS | Visibility. When the VIS term is used, it means the available sight distance between the driver and the PCL, which allows the driver to see, perceive, and understand the PCL. |
References
- WHO. Global Status Report on Road Safety 2018. 2019. Available online: https://www.who.int/publications/i/item/9789241565684 (accessed on 7 January 2024).
- Elvik, R. Assessment and Applicability of Road Safety Management Evaluation Tools: Current Practice and State-of-the-Art in Europe; TØI Report 1113/2010; Institute of Transportation Economics, Norwegian Centre for Transport Research: Oslo, Norway, 2010; ISBN 978-82-480-1171-2. [Google Scholar]
- FHWA-SA-16-038; Reliability of Safety Management Methods Diagnosis. U.S. Department of Transportation: Washington, DC, USA, 2016.
- European Parliament and European Council, Directive 2008/96/CE of the European Parliament and of the Council of 19 November 2008 on road infrastructure safety management, amended by Directive (EU) 2019/1936; European Union: Brussels, Belgium, 2019.
- PIARC. Road Accident Investigation-Guidelines for Road Engineers. pp. 1–51. 2013. Available online: https://www.piarc.org/en/order-library/19593-en-Road (accessed on 7 January 2024).
- AASHTO. Highway Safety Manual, 1st ed.; American Association of State Highway Transportation Professionals: Washington, DC, USA, 2010. [Google Scholar]
- Sacchi, E.; Persaud, B.; Bassani, M. Assessing international transferability of highway safety manual crash prediction algorithm and its components. Transp. Res. Rec. 2012, 2279, 90–98. [Google Scholar] [CrossRef]
- La Torre, F.; Domenichini, L.; Corsi, F.; Fanfani, F. Transferability of the Highway Safety Manual Freeway Model to the Italian Motorway Network. Transp. Res. Rec. J. Transp. Res. Board 2014, 2435, 61–71. [Google Scholar] [CrossRef]
- La Torre, F.; Domenichini, L.; Branzi, V.; Meocci, M.; Paliotto, A.; Tanzi, N. Transferability of the highway safety manual freeway model to EU countries. Accid. Anal. Prev. 2022, 178, 106852. [Google Scholar] [CrossRef]
- Cafiso, S.; La Cava, G.; Montella, A. Safety Index for Evaluation of Two-Lane Rural Highways. Transp. Res. Rec. J. Transp. Res. Board 2007, 2019, 136–145. [Google Scholar] [CrossRef]
- Erieba, O.; Pappalardo, G.; Hassan, A.; Said, D.; Cafiso, S. Assessment of the transferability of European road safety inspection procedures and risk index model to Egypt. Ain. Shams Eng. J. 2024, 15, 102502. [Google Scholar] [CrossRef]
- Cafiso, S.D.; La Cava, G.; Montella, A.; Pappalardo, G. A Procedure to Improve Safety Inspections Effectiveness and Reliability on Rural Two–Lane Highways. Balt. J. Road Bridge Eng. 2006, 1, 143–150. Available online: https://bjrbe-journals.rtu.lv/article/view/1822-427X.2006.3.143%E2%80%93150 (accessed on 7 January 2024).
- Cafiso, S.D.; Kiec, M.; Pappalardo, G. Innovative methods for improving the effectiveness of road safety inspection. In Proceedings of the VI International Symposium of Transport and Communications, New Horizons, Doboj, Bosnia and Herzegovina, 17–18 November 2017. [Google Scholar]
- Derras, A.; Amara, K.; Oulha, R. Application of the IRAP Method Combined with GIS to Improve Road Safety on New Highway Projects in Algeria. Period. Polytech. Transp. Eng. 2022, 50, 414–425. [Google Scholar] [CrossRef]
- 2011. Available online: www.eurorap.org (accessed on 7 January 2024).
- iRAP. iRAP Methodology Fact Sheets–iRAP. Available online: https://irap.org/methodology/ (accessed on 7 January 2024).
- Jurewicz, C.; Steinmetz, L.; Turner, B.; Cammack, M. Australian National Risk Assessment Model, vol. AP-R451-14. Sydney NSW 2000 Australia: Austroads Ltd. Level 9, 287 Elizabeth Street. 2014. Available online: www.austroads.com.au (accessed on 7 January 2024).
- European Commission. Network Wide Road Safety Assessment Methodology and Implementation Handbook; Publications Office of the European Union: Brussels, Belgium, 2023.
- Shah, S.A.R.; Brijs, T.; Ahmad, N.; Pirdavani, A.; Shen, Y.; Basheer, M.A. Road Safety Risk Evaluation Using GIS-Based Data Envelopment Analysis—Artificial Neural Networks Approach. Appl. Sci. 2017, 7, 886. [Google Scholar] [CrossRef]
- De Luca, M. A comparison between prediction power of artificial neural networks and multivariate analysis in road safety management. Transport 2017, 32, 379–385. [Google Scholar] [CrossRef]
- Singh, G.; Pal, M.; Yadav, Y.; Singla, T. Deep neural network-based predictive modeling of road accidents. Neural Comput. Appl. 2020, 32, 12417–12426. [Google Scholar] [CrossRef]
- Aichinger, C.; Nitsche, P.; Stütz, R.; Harnisch, M. Using Low-cost Smartphone Sensor Data for Locating Crash Risk Spots in a Road Network. Transp. Res. Procedia 2016, 14, 2015–2024. [Google Scholar] [CrossRef]
- Hu, Y.; Li, Y.; Yuan, C.; Huang, H. Modeling conflict risk with real-time traffic data for road safety assessment: A copula-based joint approach. Transp. Saf. Environ. 2022, 4, tdac017. [Google Scholar] [CrossRef]
- Llopis-Castelló, D.; Bella, F.; Camacho-Torregrosa, F.J.; García, A. New Consistency Model Based on Inertial Operating Speed Profiles for Road Safety Evaluation. J. Transp. Eng. A Syst. 2018, 144, 04018006. [Google Scholar] [CrossRef]
- Cafiso, S.; Di Graziano, A.; Pappalardo, G. Safety Inspection and Management Tools for Low-Volume Road Network. Transp. Res. Rec. 2015, 2472, 134–141. [Google Scholar] [CrossRef]
- Montella, A.; Mauriello, F. Procedure for ranking unsignalized rural intersections for safety improvement. Transp. Res. Rec. 2012, 2318, 75–82. [Google Scholar] [CrossRef]
- Fancello, G.; Carta, M.; Fadda, P. Road intersections ranking for road safety improvement: Comparative analysis of multi-criteria decision making methods. Transp. Policy 2019, 80, 188–196. [Google Scholar] [CrossRef]
- Treat John, R.; Tumbas, N.S.; McDonald Stephen, T.; Shinar, D.; Hume, R.D.; Mayer, R.E.; Stansifer, R.L.; Castellan, N.J. Tri-Level Study of the Causes of Traffic Accidents: Final Report Volume II: Special Analyses; Indiana University: Bloomington, IN, USA, 1979. [Google Scholar]
- Birth, S.; Demgensky, B.; Sieber, G. Relationship between Human Factors and the Likelihood of Single-Vehicle Crashes on Dutch motorways; Report for Rijkswaterstaat Dienst Verkeer en Scheepvaart: Utrecht, The Netherlands, 2015. [Google Scholar]
- Theeuwes, J. Sampling information from the road environment. In Human Factors for Highway Engineers; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Čičković, M. Influence of Human Behaviour on Geometric Road Design. Transp. Res. Procedia 2016, 14, 4364–4373. [Google Scholar] [CrossRef][Green Version]
- Perco, P. Desirable length of spiral curves for two-lane rural roads. Transp. Res. Rec. 2006, 1961, 1–8. [Google Scholar] [CrossRef]
- Calvi, A. A Study on Driving Performance Along Horizontal Curves of Rural Roads. J. Transp. Saf. Secur. 2015, 7, 243–267. [Google Scholar] [CrossRef]
- McGee, H.W. Decision Sight Distance for Highway Design and Traffic Control Requirements. Transp. Res. Rec. 1979, 736, 11–13. Available online: http://www.safetylit.org/citations/index.php?fuseaction=citations.viewdetails&citationIds[]=citjournalarticle_484334_38 (accessed on 29 December 2023).
- Domenichini, L.; Branzi, V.; Meocci, M. Virtual testing of speed reduction schemes on urban collector roads. Accid. Anal. Prev. 2018, 110, 38–51. [Google Scholar] [CrossRef]
- Recarte, M.A.; Nunes, L.M. Mental Workload While Driving: Effects on Visual Search, Discrimination, and Decision Making. J. Exp. Psychol. Appl. 2003, 9, 119–137. [Google Scholar] [CrossRef]
- Yanko, M.R.; Spalek, T.M. Route familiarity breeds inattention: A driving simulator study. Accid. Anal. Prev. 2013, 57, 80–86. [Google Scholar] [CrossRef]
- Intini, P.; Berloco, N.; Colonna, P.; Ranieri, V.; Ryeng, E. Exploring the relationships between drivers’ familiarity and two-lane rural road accidents. A multi-level study. Accid. Anal. Prev. 2017, 111, 280–296. [Google Scholar] [CrossRef]
- Ben-Bassat, T.; Shinar, D. Effect of shoulder width, guardrail and roadway geometry on driver perception and behavior. Accid. Anal. Prev. 2011, 43, 2142–2152. [Google Scholar] [CrossRef]
- Domenichini, L.; La Torre, F.; Branzi, V.; Nocentini, A. Speed behaviour in work zone crossovers. A driving simulator study. Accid. Anal. Prev. 2017, 98, 10–24. [Google Scholar] [CrossRef] [PubMed]
- Van Geem, C.; Charman, S.; Ahern, A.; Anund, A.; Sjögren, L. Speed Adaptation Control by Self-Explaining Roads (Space) Self-Explaining Roads. In Proceedings of the 16th International Conference Road Safety on Four Continents, Beijing, China, 15–17 May 2013. [Google Scholar]
- Theeuwes, J. Self-explaining roads: What does visual cognition tell us about designing safer roads? Cogn. Res. Princ. Implic. 2021, 6, 15. [Google Scholar] [CrossRef] [PubMed]
- Theeuwes, J.; Godthelp, H. Self-Explaining Roads; Elsevier: Amsterdam, The Netherlands, 1995; Volume 19, pp. 217–225. [Google Scholar]
- Theeuwes, J.; Menskunde, T.N.O.T. Self-Explaining Roads: Subjective Categorisation of Road Environments. Vision in Vehicles VI, p. 279. 1998. Available online: https://repository.tudelft.nl/islandora/object/uuid%3Aee8c24e3-0066-4dc9-9272-ecff7ffe8fcd (accessed on 7 January 2024).
- Campbell, J.L.; Lichty, M.G.; Brown, J.L.; Richard, C.M.; Graving, J.S.; Graham, J.; O’Laughlin, M.; Torbic, D.; Harwood, D. Human Factors Guidelines for Road Systems, 2nd ed.; Transportation Research Board: Washington, DC, USA, 2012. [Google Scholar] [CrossRef]
- PIARC. Human Factors Guidelines for a Safer Man-Road Interface. p. 78p. 2016. Available online: http://www.piarc.org/en/order-library/25370-en-Human (accessed on 7 January 2024).
- Cafiso, S.; D’Agostino, C.; Persaud, B. Investigating the influence of segmentation in estimating safety performance functions for roadway sections. J. Traffic Transp. Eng. 2018, 5, 129–136. [Google Scholar] [CrossRef]
- Elagamy, S.R.; El-Badawy, S.M.; Shwaly, S.A.; Zidan, Z.M.; Shahdah, U.E. Segmentation effect on the transferability of international safety performance functions for rural roads in Egypt. Safety 2020, 6, 1–24. [Google Scholar] [CrossRef]
- Paliotto, A.; Meocci, M.; Branzi, V. Application of an Innovative Network Wide Road Safety Assessment Procedure Based on Human Factors; Springer: Cham, Switzerland, 2022; pp. 493–510. [Google Scholar] [CrossRef]
- Paliotto, A. Development of a Human Factors Evaluation Procedure for Network-Wide Road Safety Assessments. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2023. [Google Scholar] [CrossRef]
- PIARC. Road Safety Evaluation Based on Human Factors Method; World Road Association (PIARC): Paris, France, 2019. [Google Scholar]
- AASHTO. A Policy on Geometric Design of Highways and Streets, 7th ed.; 2018. Available online: www.transportation.org (accessed on 7 January 2024).
- M. delle Infrastrutture e dei Trasporti and M. delle Infrastrutture e dei Trasporti, “Bozza di ‘Norme per la classificazione funzionale delle strade esistenti’-Allegato 2”; Ministry of Infrastructure and Transport: Piazzale di Porta Pia, Rome, 2003.
- Fisher, R.A. On the Interpretation of χ2 from Contingency Tables, and the Calculation of P. J. R. Stat. Soc. 1922, 85, 87. [Google Scholar] [CrossRef]
- Freeman, G.H.; Halton, J.H. Note on exact treatment of contingency, goodness of fit and other problems of significance. Biometrika 1951, 38, 141–149. [Google Scholar] [CrossRef] [PubMed]
- Kendall, M.G.; Smith, B.B. The Problem of ‘m’ Rankings. Ann. Math. Stat. 1939, 10, 275–287. [Google Scholar] [CrossRef]
- Norden, M.; Orlansky, J.; Jacobs, H. Application of statistical quality-control techniques to analysis of highway-accident data. Highw. Res. Board Bull. 1956, 117, 17–31. [Google Scholar]
- Falconetti, N. Sviluppo di un modello di previsione dell’incidentalità stradale nel contesto italiano. Ph.D. Thesis, Università Degli Studi di Trieste, Trieste, Italy, 2012. [Google Scholar]
- PIARC. Human Factors in Road Design. In Review of Design Standards in Nine Countries; PIARC: Paris, France, 2012; pp. 1–212. [Google Scholar]
- PIARC. Catalogue of Design Safety Problems and Potential Countermeasures. p. 169. 2009. Available online: https://www.piarc.org/en/order-library/6458-en-PIARC (accessed on 7 January 2024).
- Birth, S. Expert Psychological Report: Psychological Preconditions for Fly-Over Junctions; Ministry of Infrastructure and Regional Development: Potsdam, Germany, 2004.
- Elliott, M.A.; McColl, V.; Kennedy, J.V. Road Design Measures to Reduce Drivers’ Speed via ‘Psychological’ Processes: A Literature Review. 2003. Available online: http://strathprints.strath.ac.uk/20278/ (accessed on 7 January 2024).
- Lauckner, M. Influence of Basic Environmental Characteristics on Driving Speed; Technische Universität Berlin: Berlin, German, 2016. [Google Scholar]
- Birth, S. Human Factors Design Features Supporting Space Perception. In Proceedings of the 4th International Conference on Safer Road Infrastructure, Prague, Czech Republic, 14–17 April 2009. [Google Scholar]
- Green, M. Roadway Human Factors: From Science To Application; Lawyers & Judges Publishing Company: Tucson, AZ, USA, 2017. [Google Scholar]
- Birth, S.; Sieber, G.; Staadt, H. Strassenplanung und Strassenbau mit Human Factors. Ein Leitfaden; Ministerium für Infrastruktur und Raumordnung: Potsdam, Germany, 2004. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti. Decreto Ministeriale ‘Norme Funzionali e Geometriche per la Costruzione Delle Intersezioni Stradali; Italian Ministry of Transportation Decreto Ministeriale: Rome, Italy, 2006.
- Alexander, G.; Lunenfeld, H. Driver Expectancy in Highway Design and Traffic Operations. In NHTSA Technical Report; U.S. Department of Transportation, Federal Highway Administration Office of Traffic Operations: Washington, DC, USA, 1986; pp. 37–39. [Google Scholar]
- C. I. Team et al., “Optical Illusions on Roads and Measures for Their Reduction,” 2013, Collaboration Research Project for Visual Illusion and Mathematical Sciences, Meiji Institute for Advanced Study of Mathematical Sciences, 4-21-1 Nakano, Nakano-ku, Tokyo 164-8525 Japan. Available online: http://compillusion.mims.meiji.ac.jp/pdf/roadillusions_eng.pdf (accessed on 8 February 2024).
- PIARC. Setting Credible Speed Limits Case Studies Report; PIARC: Paris, France, 2019. [Google Scholar]
- PIARC. Road Safety Inspection Guidelines for Safety Checks of Existing Roads. p. 83. 2012. Available online: https://www.piarc.org/en/order-library/18265-en-Road (accessed on 7 January 2024).
- Ministero Delle Infrastrutture e dei Trasporti. Decreto Ministeriale ‘Norme Funzionali e Geometriche per la Costruzione Delle Strade; Italian Ministry of Transportation Decreto Ministeriale: Rome, Italy, 2001.
- Forschungsgesellschaft für Straßen-und Verkehrswesen. Richtlinien für die Anlage von Straßen: RAS; Arbeitgruppe Straßenentwurf: Köln, Germany, 1995. [Google Scholar]
- Lamm, R.; Psarianos, B.; Mailaender, T. Highway Design and Traffic Safety Engineering Handbook; McGraw-Hill: New York, NY, USA, 1999; pp. 137–171. [Google Scholar]
- Lamm, R.; Psarianos, B.; Cafiso, S. Safety Evaluation Process for Two-Lane Rural Roads: A 10-Year Review. Transp. Res. Rec. J. Transp. Res. Board 2002, 1796, 51–59. [Google Scholar] [CrossRef]
- United Nations. Economic Commission for Europe. Transport Division. Convention on Road Signs and Signals of 1968: European Agreement Supplementing the Convention and Protocol on Road Markings, Additional to the European Agreement. p. 276. 2007. Available online: https://digitallibrary.un.org/record/623006 (accessed on 28 December 2023).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Category | Winding | PPI | VE | Alertness |
|---|---|---|---|---|
| Rural highway | H | M | M (50–80 km/h) | H |
| Rural highway | H | L | M (50–80 km/h) | M |
| Rural highway | M | M | M (50–80 km/h) | M |
| Rural highway | M | L | H (80–100 km/h) | L |
| Rural highway | L | M | M (50–80 km/h) | M |
| Rural highway | L | L | H (80–100 km/h) | L |
| PCLs Type | PCLs | Winding/PPI Level (H = High, M = Medium, L = Low) | |||||
|---|---|---|---|---|---|---|---|
| L/L | L/M | M/L | M/M | H/L | H/M | ||
| Curve | Curve0 | L | L | L | L | L | L |
| Curve10 | H | H | L | L | L | L | |
| Curve20 | H | H | M | M | M | L | |
| At-grade intersection | Roundabout | M | L | M | L | M | L |
| Signalized | H | H | H | H | H | H | |
| with priority | L | L | L | L | L | L | |
| without priority | H | H | H | H | H | H | |
| Crossing | Pedestrian Crossing | H | M | H | M | H | M |
| Cyclist Crossing | H | M | H | M | H | M | |
| Driveway | Minor residential | L | L | L | L | L | L |
| Major residential | M | L | H | M | H | M | |
| Minor commercial | L | L | L | L | L | L | |
| Major Commercial | M | M | H | M | H | H | |
| Stopping area | Parking lots | H | H | H | H | H | H |
| Lay-by | L | L | L | L | M | M | |
| Bus stop | L | L | L | L | L | L | |
| Railway level crossing | With mobile bar | M | M | H | H | H | H |
| Without mobile bar | H | H | H | H | H | H | |
| Lane change | Added/removed lane | M | H | H | H | H | H |
| Diverging lane | H | H | H | H | H | H | |
| VE Level | VE [km/h] | Max (VE) [km/h] | Min (VE) [km/h] | D2 (6 s) [m] | D2 (5 s) [m] | D2 (4 s) [m] | D1 [m] |
|---|---|---|---|---|---|---|---|
| H | 80–100 | 100 | 80 | 170 | 140 | 112 | 90 |
| M | 50–80 | 80 | 50 | 135 | 112 | 90 | 56 |
| DENSITY AND SHAPE OF THE FIELD OF VIEW |
| The monotony of road section and surroundings |
| Long/far visible approaching sections before CHL |
| ELEMENTS IN THE LATERAL ROADSIDE ENVIRONMENT SUPPORT OPTIMAL LANE-KEEPING |
| Structures above the road |
| Presence of eye-catching objects |
| Illusion-free optical guidance |
| Carriageway width changes are well-delineated |
| Roadside objects appear to be vertical |
| Curve’s framing |
| DEPTH OF FIELD VIEW |
| Dominant eye-catching objects support the detection of the challenging location |
| Presence of optical illusion |
| The course of the road is visible |
| Combination | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VIS | L | M | H | L | M | H | L | M | H | L | M | H | L | M | H | L | M | H |
| GEX | H | H | H | M | M | M | L | L | L | H | H | H | M | M | M | L | L | L |
| PEX | H | H | H | H | H | H | H | H | H | L | L | L | L | L | L | L | L | L |
| Results | X | X | X | X | X | X | - | X | X | - | X | X | - | - | X | - | - | - |
| VE Level | VE [km/h] | Max (VE)-10 [km/h] | Distance (12 s) [m] | Distance (10 s) [m] |
|---|---|---|---|---|
| H | 80–100 | 90 | 300 | 250 |
| M | 50–80 | 70 | 233 | 194 |
| Priority | A | B | C | D | E |
|---|---|---|---|---|---|
| Higher | R | High value | Low value | Low value | High dispersion |
| Lower | G | Low value | High value | High value | Low dispersion |
| Road | Name | Length [km] | AADT [veh. /day] | RC | RC Risk Level | RC Rank | AR * | AR Risk Level | AR Rank |
|---|---|---|---|---|---|---|---|---|---|
| SR2 | NAS 2 | 1.950 | 4247 | R4-34-51/25 | Very High | 1 | 1.32 | High | 3 |
| B38 | NAS 6 | 1.200 | 10,456 | R3-38-74/28 | High | 2 | 1.31 | High | 4 |
| SR2 | NAS 10 | 1.500 | 12,395 | R3-40-74/29 | High | 3 | 0.59 | Medium | 20 |
| 106 | NAS 14 | 1.200 | 8369 | R2-39-73/29 | High | 4 | 0.87 | High | 10 |
| L3106 | NAS 3 | 1.250 | 1783 | R2-41-68/26 | High | 5 | 2.05 | High | 1 |
| 106 | NAS 7 | 1.000 | 8369 | R2-41-80/26 | High | 6 | 1.11 | High | 5 |
| L3106 | NAS 6 | 1.140 | 2922 | R2-42-58/22 | High | 7 | 0.82 | Medium | 12 |
| 106 | NAS 10 | 1.100 | 8369 | R2-42-72/28 | High | 8 | 0.95 | High | 9 |
| 106 | NAS 6 | 1.100 | 8369 | R2-43-54/20 | High | 9 | 0.77 | High | 14 |
| 106 | NAS 2 | 1.300 | 8369 | R2-44-60/23 | High | 10 | 0.65 | Medium | 18 |
| B38 | NAS 4 | 1.000 | 14,098 | R2-45-73/27 | High | 11 | 0.97 | High | 8 |
| SR206 | NAS 5 | 1.300 | 11,799 | R1-40-54/23 | Medium | 12 | 0.43 | Medium | 29 |
| SR2 | NAS 6 | 1.250 | 4247 | R1-40-64/28 | Medium | 13 | 0.21 | Medium | 43 |
| B38 | NAS 5 | 1.200 | 10,179 | R1-40-68/26 | Medium | 14 | 0.82 | High | 13 |
| L3106 | NAS 1 | 0.800 | 3024 | R1-40-70/26 | Medium | 15 | 1.51 | High | 2 |
| L3408 | NAS 2 | 1.410 | 3311 | R1-41-67/25 | Medium | 16 | 0.39 | Medium | 34 |
| 106 | NAS 13 | 1.200 | 8369 | R1-41-73/27 | Medium | 17 | 0.76 | High | 15 |
| L3408 | NAS 1 | 1.500 | 3311 | R1-41-77/25 | Medium | 18 | 0.74 | Medium | 17 |
| SR206 | NAS 1 | 1.300 | 11,799 | R1-41-79/26 | Medium | 19 | 0.21 | Low | 41 |
| SR206 | NAS 10 | 1.050 | 11,799 | R1-41-80/27 | Medium | 20 | 0.40 | Medium | 33 |
| SR206 | NAS 7 | 1.100 | 11,799 | R1-42-50/20 | Medium | 21 | 0.21 | Low | 42 |
| SR2 | NAS 3 | 0.950 | 4247 | R1-42-63/27 | Medium | 22 | 0.27 | Medium | 38 |
| 106 | NAS 9 | 1.000 | 8369 | R1-42-68/29 | Medium | 23 | 1.05 | High | 6 |
| L3106 | NAS 4 | 1.250 | 1783 | R1-42-73/25 | Medium | 24 | 0.41 | Medium | 31 |
| 106 | NAS 12 | 1.100 | 8369 | R1-43-71/27 | Medium | 25 | 0.83 | High | 11 |
| 106 | NAS 15 | 0.900 | 8369 | R1-43-74/28 | Medium | 26 | 0.36 | Medium | 36 |
| SR2 | NAS 9 | 0.750 | 12,395 | R1-43-74/26 | Medium | 27 | 0.41 | Medium | 30 |
| SR206 | NAS 2 | 1.350 | 11,799 | R1-44-55/20 | Medium | 28 | 0.14 | Low | 47 |
| SR2 | NAS 4 | 1.150 | 4247 | R1-44-70/26 | Medium | 29 | 0.34 | Medium | 37 |
| B38 | NAS 9 | 1.190 | 12,021 | R1-44-73/25 | Medium | 30 | 0.51 | Medium | 23 |
| SR206 | NAS 12 | 1.100 | 15,335 | R1-44-84/25 | Medium | 31 | 0.39 | Medium | 35 |
| SR2 | NAS 5 | 1.000 | 4247 | R1-45-76/26 | Medium | 32 | 0.52 | Medium | 22 |
| SR206 | NAS 9 | 1.000 | 11,799 | R1-46-73/27 | Medium | 33 | 0.09 | Low | 49 |
| SR2 | NAS 7 | 0.900 | 4247 | R1-46-74/26 | Medium | 34 | 0.00 | Low | 52 |
| SR206 | NAS 4 | 1.000 | 11,799 | R1-46-93/18 | Medium | 35 | 0.23 | Low | 39 |
| 106 | NAS 1 | 1.000 | 8369 | R1-47-82/22 | Medium | 36 | 0.46 | Medium | 28 |
| 106 | NAS 8 | 1.100 | 8369 | R1-47-87/22 | Medium | 37 | 0.54 | Medium | 21 |
| SR2 | NAS 1 | 1.200 | 4247 | R1-47-92/18 | Medium | 38 | 0.11 | Low | 48 |
| B38 | NAS 3 | 1.000 | 11,078 | R1-64-93/14 | Medium | 39 | 0.49 | Medium | 24 |
| L3106 | NAS 2 | 0.800 | 3024 | Y4-42-71/25 | Medium | 40 | 0.00 | Low | 53 |
| SR206 | NAS 6 | 1.100 | 11,799 | Y4-43-76/27 | Medium | 41 | 0.00 | Low | 54 |
| 106 | NAS 3 | 1.300 | 8369 | Y4-45-74/26 | Medium | 42 | 0.76 | High | 16 |
| B38 | NAS 7 | 1.100 | 10,732 | Y4-46-81/25 | Medium | 43 | 0.46 | Medium | 27 |
| B38 | NAS 1 | 1.300 | 7068 | Y4-47-81/23 | Medium | 44 | 0.20 | Medium | 44 |
| L3106 | NAS 5 | 1.050 | 2922 | Y4-47-84/22 | Medium | 45 | 0.60 | Medium | 19 |
| SR206 | NAS 13 | 1.200 | 15,335 | Y4-47-94/16 | Medium | 46 | 0.18 | Low | 45 |
| SR206 | NAS 3 | 0.950 | 11,799 | Y4-48-90/20 | Medium | 47 | 0.00 | Low | 51 |
| 106 | NAS 11 | 0.800 | 8369 | Y3-52-73/22 | Low | 48 | 0.41 | Medium | 32 |
| 106 | NAS 4 | 1.200 | 8369 | Y3-53-93/17 | Low | 49 | 0.22 | Low | 40 |
| B38 | NAS 8 | 0.700 | 11,377 | Y3-57-79/21 | Low | 50 | 1.03 | High | 7 |
| B38 | NAS 2 | 1.200 | 8058 | Y3-58-75/20 | Low | 51 | 0.47 | Medium | 25 |
| 106 | NAS 5 | 0.700 | 8369 | Y1-61-94/14 | Low | 52 | 0.47 | Medium | 26 |
| SR206 | NAS 11 | 1.150 | 15,335 | G4-100-100/00 | Low | 53 | 0.03 | Low | 50 |
| SR206 | NAS 8 | 1.000 | 11,799 | G4-100-100/00 | Low | 54 | 0.14 | Low | 46 |
| Contingency Table | Accident Rate | ||||
|---|---|---|---|---|---|
| Low | Medium | High | Tot. | ||
| Proposed procedure | Low | 3 | 3 | 1 | 7 |
| Medium | 11 | 19 | 6 | 36 | |
| High | 0 | 3 | 8 | 11 | |
| Tot. | 14 | 25 | 15 | 54 | |
| Code | Associated Value |
|---|---|
| R4 | 8 |
| R3 | 7 |
| R2 | 6 |
| R1 | 5 |
| Y4 | 4 |
| Y3 | 3 |
| Y2 | 2 |
| Y1 | 1 |
| Z4 | 0 |
| Name | AADT [Veh. /Day] | Team 1 | Team 2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Length [km] | RC | RC Risk Level | RC Rank | Length [km] | RC | RC Risk Level | RC Rank | ||
| NAS 1 | 4247 | 1.200 | R1-47-92/18 | Medium | 9 | 1.100 | R1-51-72/21 | Medium | 8 |
| NAS 2 | 4247 | 1.950 | R4-34-51/25 | Very High | 1 | 1.750 | R4-34-56/26 | Very High | 1 |
| NAS 3 | 4247 | 0.950 | R1-42-63/27 | Medium | 4 | 0.900 | R1-45-69/26 | Medium | 6 |
| NAS 4 | 4247 | 1.150 | R1-44-70/26 | Medium | 6 | 0.950 | R1-45-61/24 | Medium | 4 |
| NAS 5 | 4247 | 1.000 | R1-45-76/26 | Medium | 7 | 1.100 | R1-47-67/23 | Medium | 7 |
| NAS 6 | 4247 | 1.250 | R1-40-64/28 | Medium | 3 | 1.330 | R1-42-73/26 | Medium | 3 |
| NAS 7 | 4247 | 0.900 | R1-46-74/26 | Medium | 8 | 1.230 | R1-45-62/22 | Medium | 5 |
| NAS 9 | 12,395 | 0.750 | R1-43-74/26 | Medium | 5 | 0.750 | Y4-52-72/23 | Medium | 9 |
| NAS 10 | 12,395 | 1.500 | R3-40-74/29 | High | 2 | 1.100 | R3-36-58/25 | High | 2 |
| Previous Version | Actual Version | ||||||
|---|---|---|---|---|---|---|---|
| Road | Name | Length [km] | RC | Risk Level | Length [km] | RC | Risk Level |
| SR2 | NAS 2 | 1.950 | R4-34-54/24 | Very High | 1.950 | R4-34-51/25 | Very High |
| B38 | NAS 6 | 1.200 | R3-38-71/28 | High | 1.200 | R3-38-74/28 | High |
| SR2 | NAS 10 | 1.250 | R3-41-75/28 | High | 1.500 | R3-40-74/29 | High |
| 106 | NAS 14 | 1.200 | R2-35-72/30 | High | 1.200 | R2-39-73/29 | High |
| 106 | NAS 7 | 1.000 | R2-41-80/26 | High | 1.000 | R2-41-80/26 | High |
| 106 | NAS 10 | 1.100 | R2-42-72/28 | High | 1.100 | R2-42-72/28 | High |
| 106 | NAS 6 | 1.100 | R2-43-54/20 | High | 1.100 | R2-43-54/20 | High |
| 106 | NAS 2 | 1.300 | R2-44-60/23 | High | 1.300 | R2-44-60/23 | High |
| B38 | NAS 4 | 1.000 | R1-45-74/26 | Medium | 1.000 | R2-45-73/27 | High |
| SR2 | NAS 6 | 1.250 | R1-46-72/22 | Medium | 1.250 | R1-40-64/28 | Medium |
| B38 | NAS 5 | 1.200 | R1-40-68/25 | Medium | 1.200 | R1-40-68/26 | Medium |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paliotto, A.; Meocci, M. Development of a Network-Level Road Safety Assessment Procedure Based on Human Factors Principles. Infrastructures 2024, 9, 35. https://doi.org/10.3390/infrastructures9020035
Paliotto A, Meocci M. Development of a Network-Level Road Safety Assessment Procedure Based on Human Factors Principles. Infrastructures. 2024; 9(2):35. https://doi.org/10.3390/infrastructures9020035
Chicago/Turabian StylePaliotto, Andrea, and Monica Meocci. 2024. "Development of a Network-Level Road Safety Assessment Procedure Based on Human Factors Principles" Infrastructures 9, no. 2: 35. https://doi.org/10.3390/infrastructures9020035
APA StylePaliotto, A., & Meocci, M. (2024). Development of a Network-Level Road Safety Assessment Procedure Based on Human Factors Principles. Infrastructures, 9(2), 35. https://doi.org/10.3390/infrastructures9020035