


Modeling Riding and Stopping Behaviors at Motorcycle Box Intersections: A Case Study in Chiang Mai City, Thailand
 ,
,
Abstract
1. Introduction
2. Literature Review
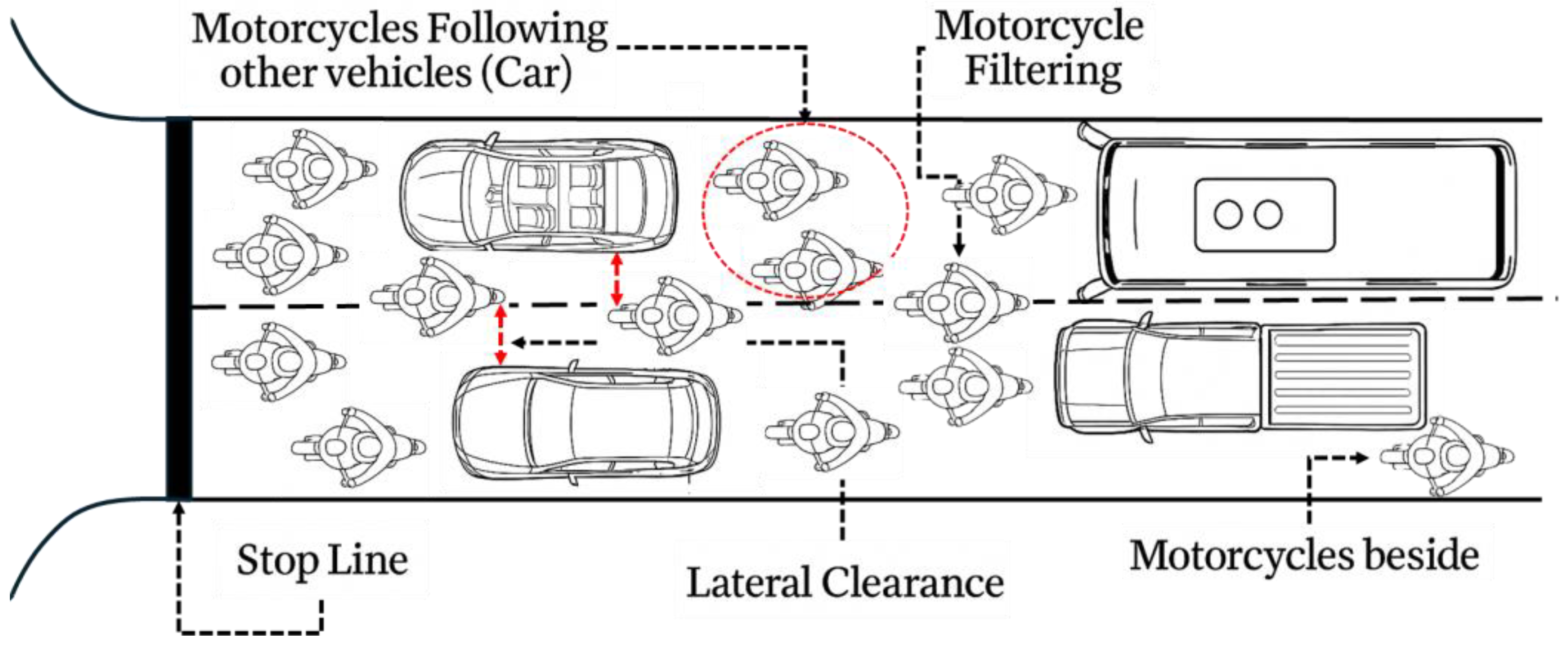
2.1. Motorcycle Box Intersection
2.2. Stopping Behavior at Intersections
2.3. Entropy Analysis in Traffic and Behavior Modeling
3. Methodology
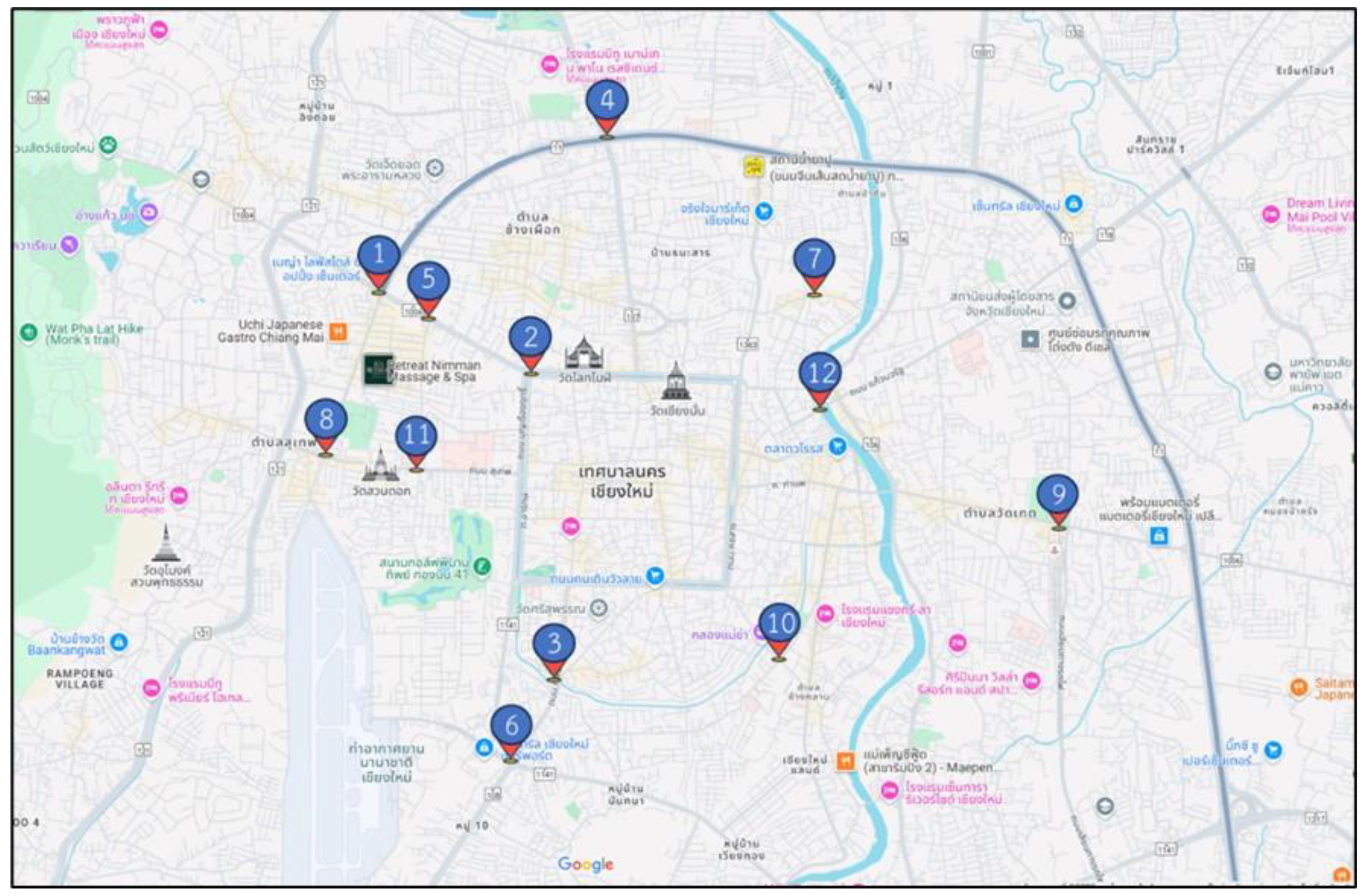
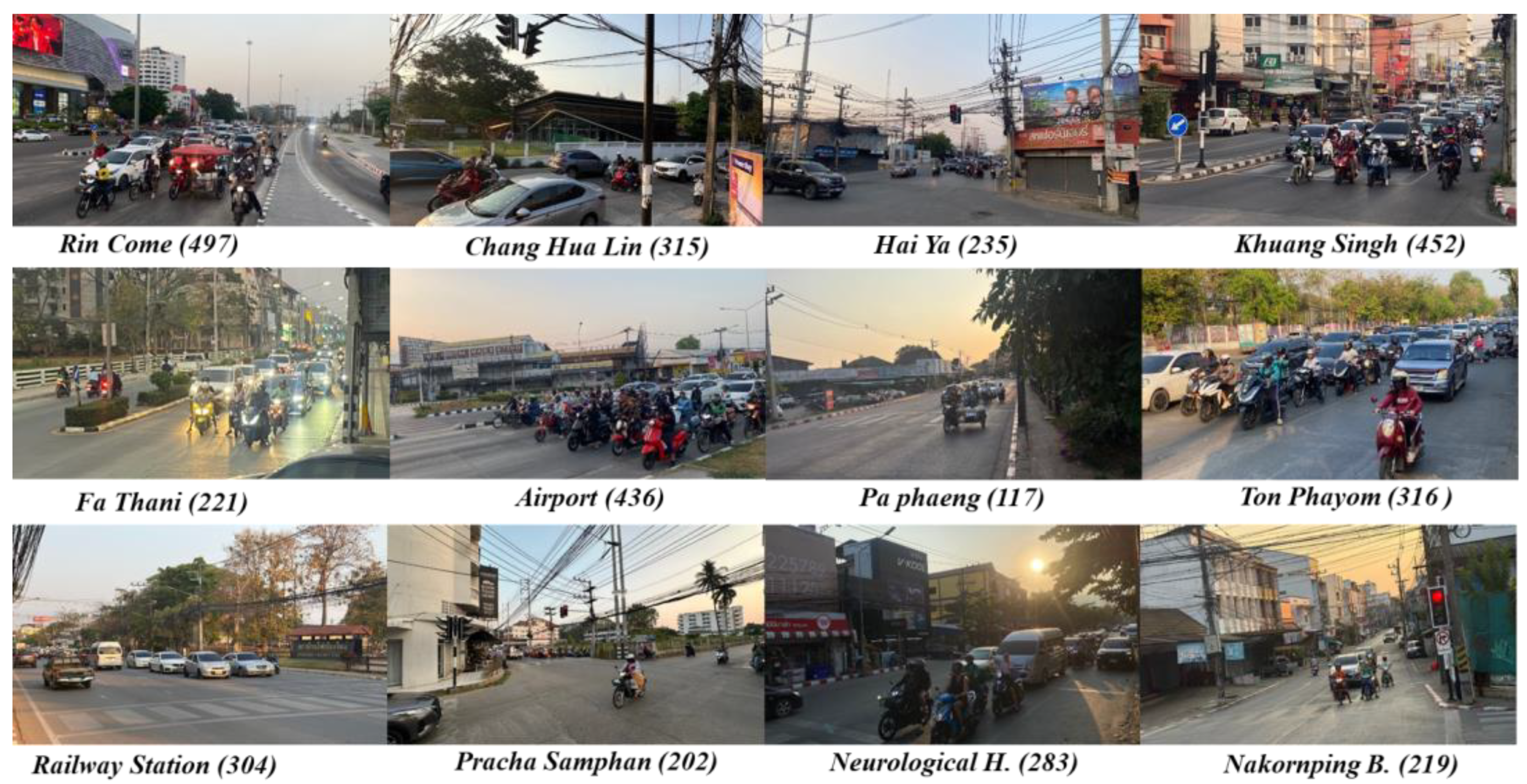
3.1. Data Collection
3.2. Microscopic Traffic Simulation Model Development
- Characteristics of Intersections
- Lane width
- Traffic signal configuration
- The size of the motorcycle box
- Parameters for motorcycle box base model
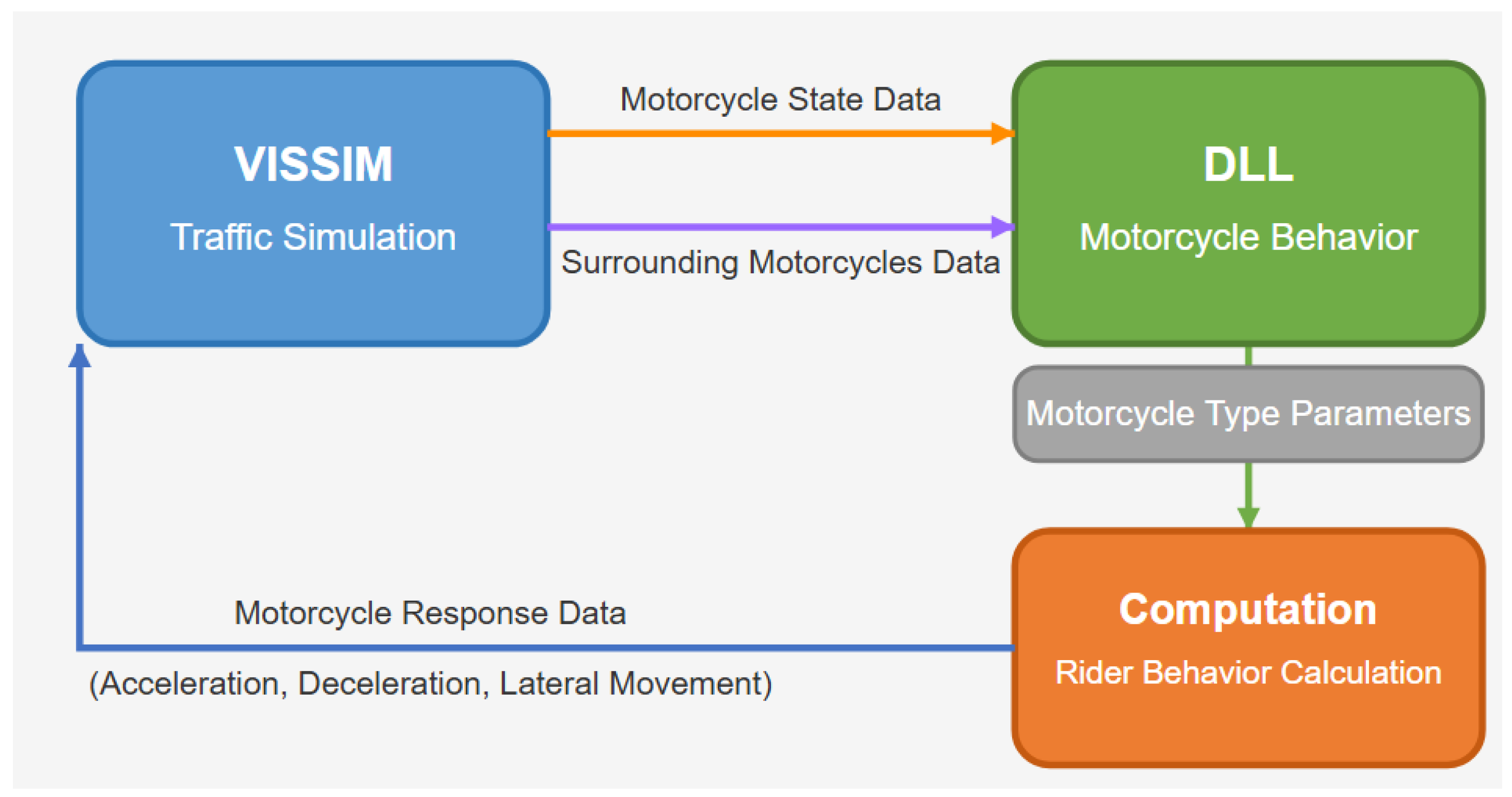
3.3. Traffic Simulation with Motorcycle External Driver Model (MC-EDM)
4. Model Calibration and Validation
4.1. Model Calibration and Validation on Stopping and Filtering Behaviors
- Two-lane intersection (Phrachasamphan intersection): The lateral position entropy from the field data was 1.014. The MC-EDM model gave a value of 1.052 (deviation +3.75%), while the base Vissim model showed a deviation as high as +34.32%.
- Four-lane intersection (Rincome intersection): The lateral position entropy from the field data was 1.142. The MC-EDM model gave a value of 1.187 (deviation +3.94%), while the base Vissim model showed a deviation of up to +19.44%.
- Six-lane intersection (railway station intersection): The lateral position entropy from the field data was 1.075. The MC-EDM model gave a value of 1.128 (deviation +4.93%), while the base Vissim model showed a deviation as high as +37.95%.
- Two-lane intersection (Phrachasamphan intersection): The field data had a 65.7% motorcycle filtering rate, while the MC-EDM model gave 63.8% (deviation −2.89%).
- Four-lane intersection (Rincome intersection): The field data had a 75.3% motorcycle filtering rate, while the MC-EDM model gave 73.5% (deviation −2.89%).
- Six-lane intersection (railway station intersection): The field data had a 65.7% motorcycle filtering rate, while the MC-EDM model gave 63.8% (deviation −2.89%).
4.2. Spatial-Temporal Visualization of Vehicle Movement Patterns
5. Results and Discussion
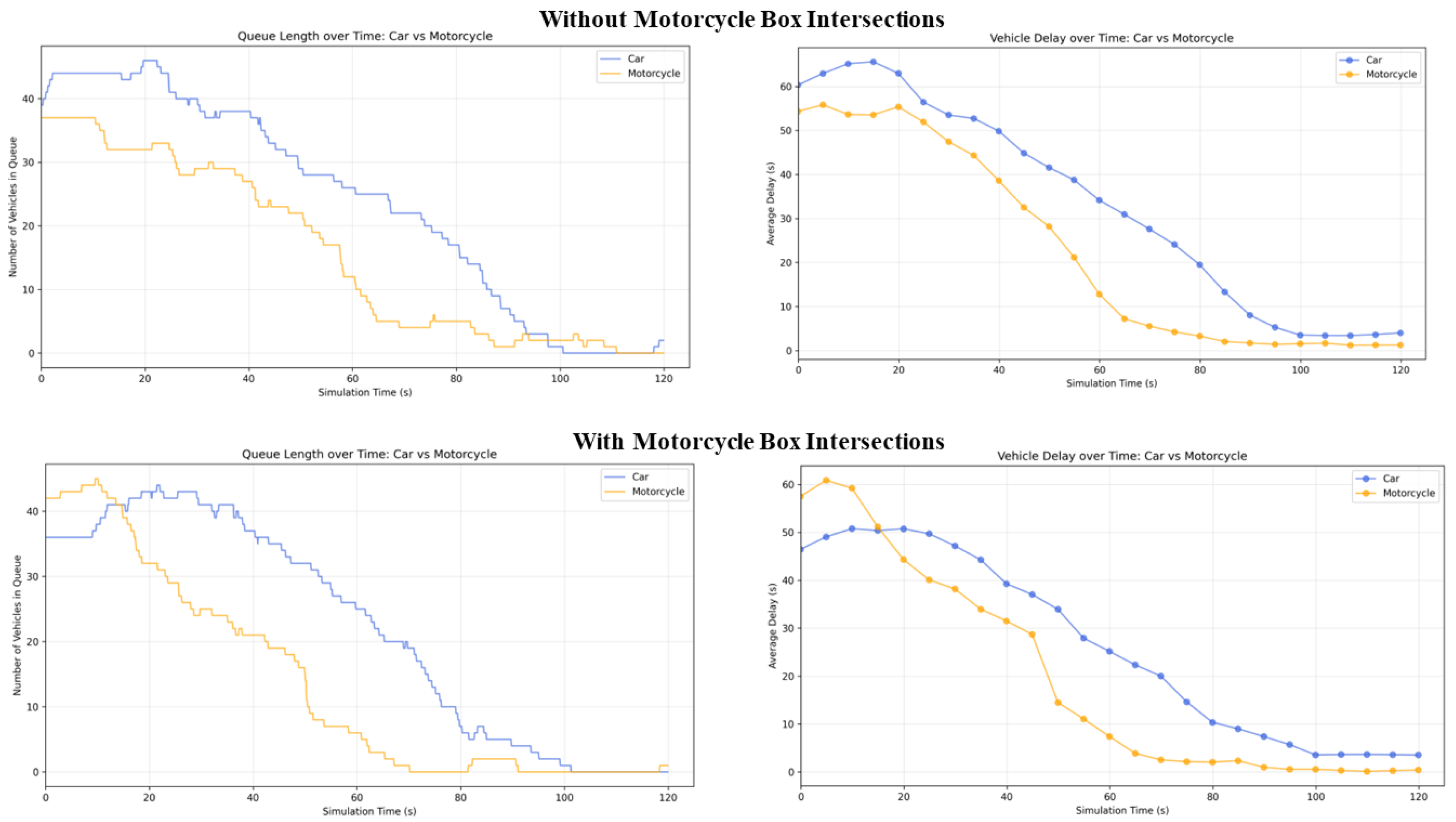
5.1. Flow Rate and Filtering Rate
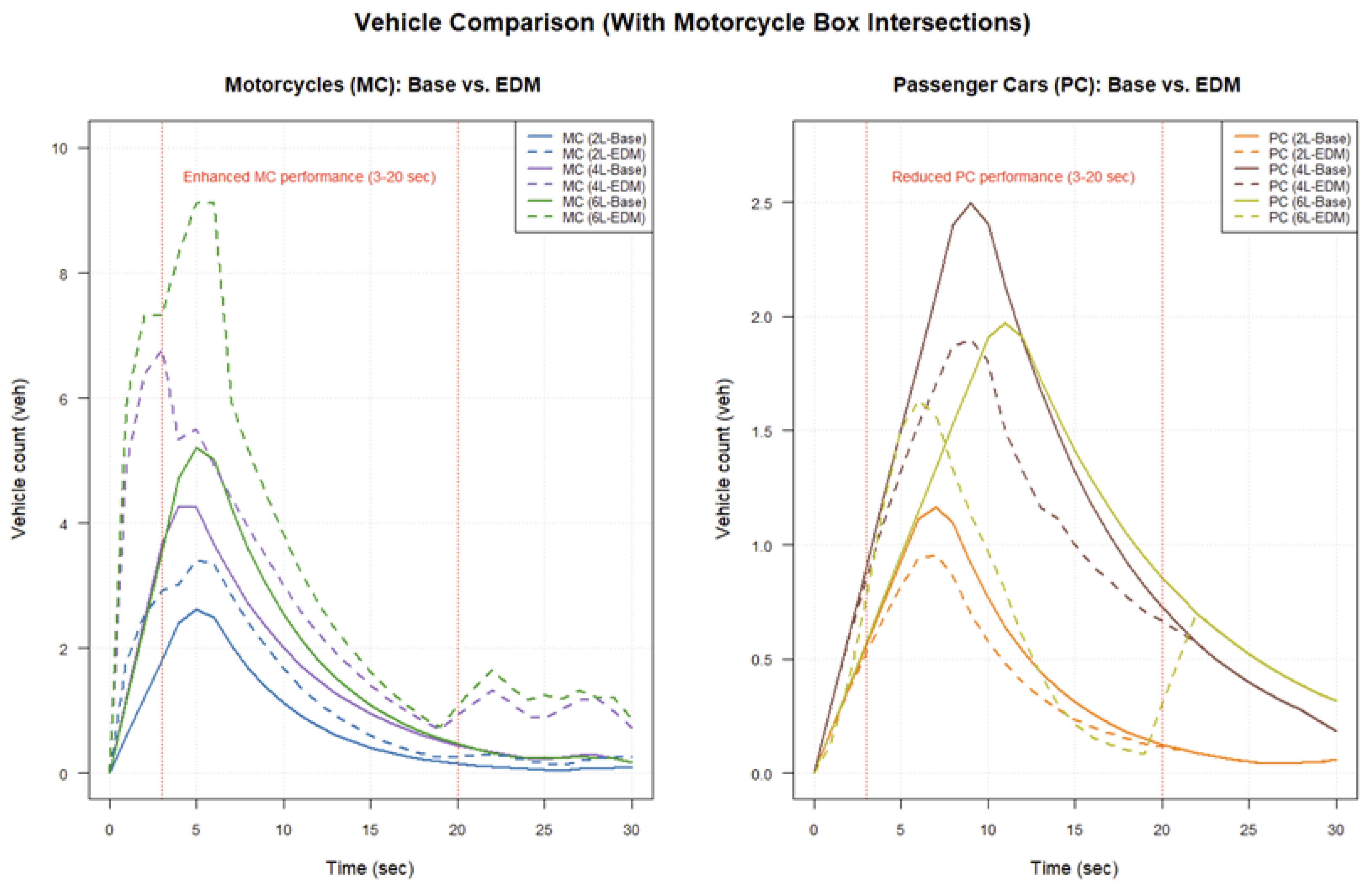
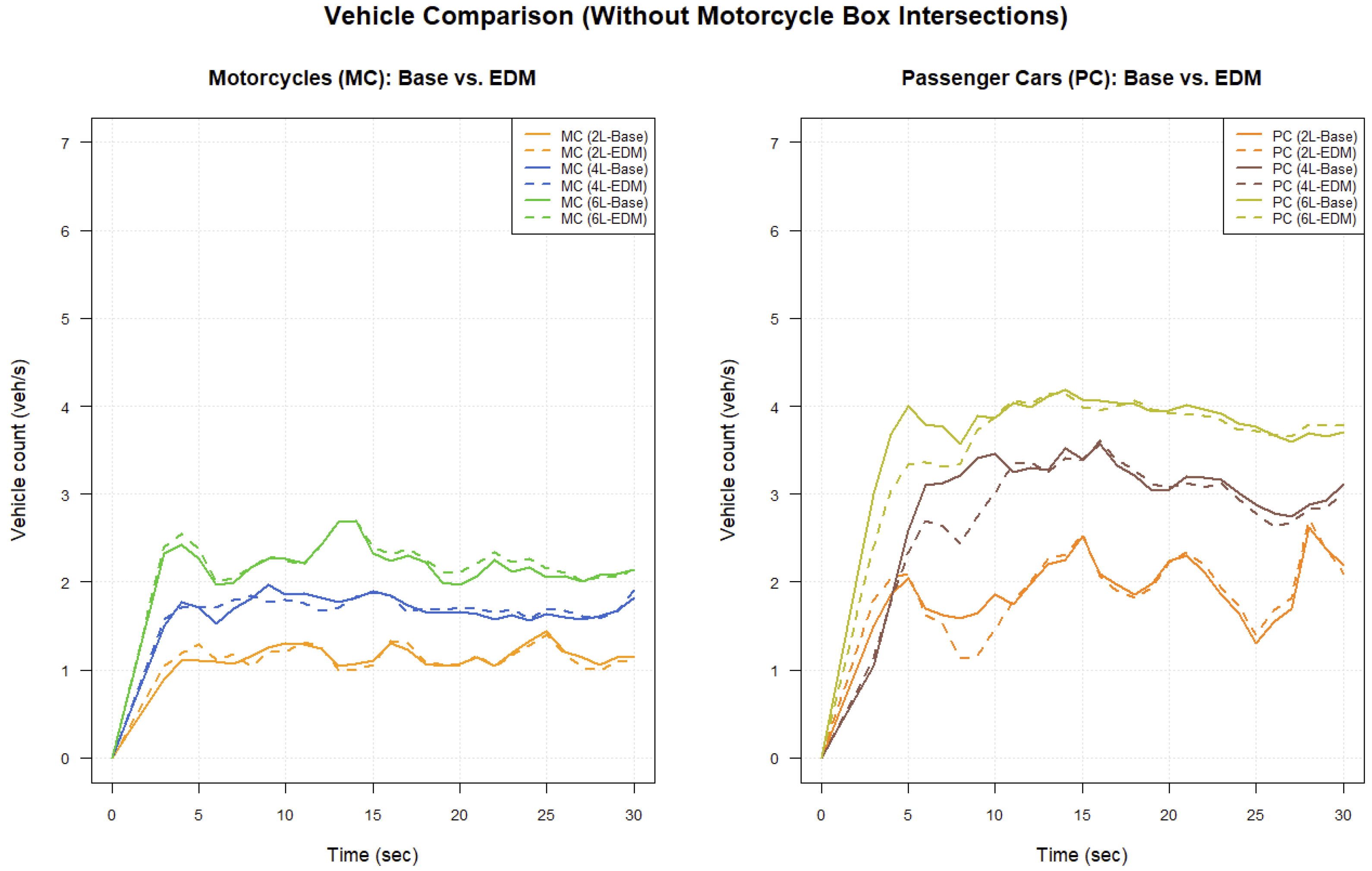
5.2. Traffic Flow Analysis
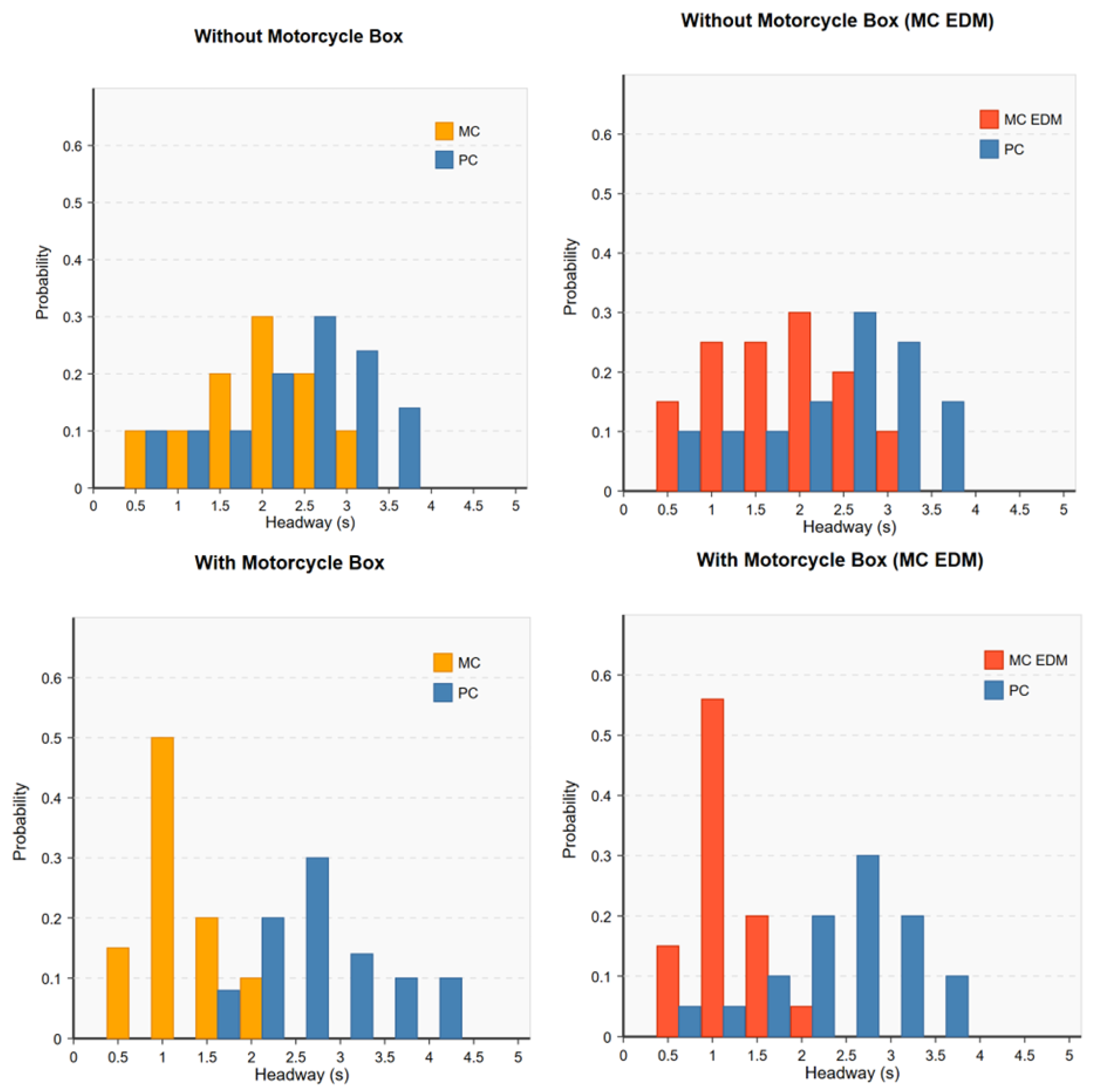
5.3. Headway Distribution
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
| Algorithm A1: Motorcycle Filtering Behavior Model. |
| 1: procedure MOTORCYCLE_FILTERING_MODEL (m, T, I) 2: /* Initialize key parameters */ 3: v ← m.velocity 4: x ← m.position 5: d_i ← distance(x, nearest_signal(I)) 6: s ← s1 // Initial strategy: NORMAL 7: 8: /* Strategy selection based on traffic conditions */ 9: if d_i < d_threshold and v < v_threshold then 10: x_f ← estimate_queue_front(x, T, d_i) 11: if (x_f − x) < d_f then 12: s ← s3 // FRONT_SEEKING 13: else if late_arrival(m, T) then 14: s ← s2 // AGGRESSIVE 15: end if 16: end if 17: 18: /* Space identification process */ 19: G ← ∅ // Empty set of potential gaps 20: for each vehicle v ∈ neighborhood(T, x, d_max) do 21: g ← find_gap_near(v, T) 22: if g.width > (w_m + 2·δ_s + v·k_v) then 23: g.ρ ← ρ(g, x_f, d_i) // Calculate priority 24: if g.leads_to_intersection then 25: g.ρ ← g.ρ + ρ_i 26: end if 27: G ← G ∪ {g} 28: end if 29: end for 30: 31: g* ← arg max_{g∈G} g.ρ // Select highest priority gap 32: if g* exists and safety(g*, v) then 33: if ¬m.filtering then 34: /* Start filtering process */ 35: m.filtering ← true 36: m.stage ← φ1 // Initial stage: PREPARATION 37: end if 38: 39: /* Update parameters based on filtering stage */ 40: if m.stage = φ1 then 41: p ← (g*.x − x)/(g*.x − x0) // Progress ratio 42: m.λ_target ← g*.λ·(α1 + β1·p) 43: m.v_desired ← f_v(v, s, φ1) 44: if p > p_threshold then m.stage ← φ2 end if 45: 46: else if m.stage = φ2 then 47: m.λ_target ← g*.λ·min(λ_max, α2 + β2·p) 48: m.v_desired ← f_v(v, s, φ2) 49: if x ≥ g*.x then m.stage ← φ3 end if 50: 51: else if m.stage = φ3 then 52: m.θ_target ← θ_road + (m.θ − θ_road)·γ 53: if |m.λ–m.λ_target| < ε then 54: m.filtering ← false 55: end if 56: end if 57: 58: /* Calculate final control parameters */ 59: Δθ ← f_θ(m.λ, m.λ_target, v) 60: m.θ ← θ_road + min(max(Δθ, −θ_max), θ_max) 61: m.indicator ← direction(g*.side) 62: end if 63: 64: return m with updated parameters 65: end procedure |
References
- Iamtrakul, P.; Chayphong, S.; Klaylee, J. Foreign Tourist Behavior and Perception of Motorcycle Accident Risk in Chiang Mai, Thailand. Lowl. Technol. Int. 2019, 21, 187–196. [Google Scholar]
- Minh, C.; Sano, K.; Matsumoto, S. Maneuvers of motorcycles in queues at signalized intersections. J. Adv. Transp. 2012, 46, 39–53. [Google Scholar] [CrossRef]
- Damani, J.; Vedagiri, P. Safety of motorised two wheelers in mixed traffic conditions: Literature review of risk factors. J. Traffic Transp. Eng. 2021, 8, 35–56. [Google Scholar] [CrossRef]
- Promraksa, T.; Satiennam, T.; Satiennam, W.; Kaewwichian, P.; Kronprasert, N. Factors Influencing Stopping Locations of Motorcycle Riders on Signalized Urban Intersection Approaches. Sustainability 2022, 14, 15236. [Google Scholar] [CrossRef]
- Mulyadi, A.M.; Sihombing, A.V.R.; Hendrawan, H.; Marpaung, E.; Malisan, J.; Arianto, D.; Mardiana, T.S.; Puriningsih, F.S.; Subaryata; Siregar, N. A.M.; et al. Effect of Traffic Lights Countdown Timer and Motorcycle Lanes as an Approach to the Red Box for Motorcycles in Bali Island. Infrastructures 2022, 7, 127. [Google Scholar] [CrossRef]
- Bonela, S.R.; Kadali, B.R. Examining the effect of vehicle type on right-turn crossing conflicts of minor road traffic at unsignalized T-intersections. IATSS Res. 2023, 47, 545–556. [Google Scholar] [CrossRef]
- Abdul Manan, M.M. Motorcycles entering from access points and merging with traffic on primary roads in Malaysia: Behavioral and road environment influence on the occurrence of traffic conflicts. Accid. Anal. Prev. 2014, 70, 301–313. [Google Scholar] [CrossRef]
- Dill, J.; Monsere, C.M.; McNeil, N. Evaluation of bike boxes at signalized intersections. Accid. Anal. Prev. 2012, 44, 126–134. [Google Scholar] [CrossRef]
- Retting, R.; Van Houten, R. Safety benefits of advance stop lines at signalized intersections: Results of a field evaluation. ITE J. (Inst. Transp. Eng.) 2000, 70, 47–49. [Google Scholar]
- León, F.J.; Pérez-Pulido, M.; Mogollón-Alaguna, O.; Salas-Rondón, M. Effectiveness of the advanced stop line for motorcycles in Bucaramanga validated by means of a logistic regression model. Aibi Res. Manag. Eng. J. 2025, 13, 44–51. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, H.; Ben-Akiva, M.; Jha, M. Microscopic Traffic Simulation: Models and Application. In Simulation Approaches in Transportation Analysis: Recent Advances and Challenges; Springer: Boston, MA, USA, 2005; Volume 31, pp. 99–130. [Google Scholar]
- Zhao, J.; Knoop, V.L.; Wang, M. Microscopic Traffic Modeling Inside Intersections: Interactions Between Drivers. Transp. Sci. 2023, 57, 135–155. [Google Scholar] [CrossRef]
- Wall, G.T.; Davies, D.G.; Crabtree, M. Capacity Implications of Advanced Stop Lines for Cyclists. TRL Rep. 2003, 585, 46. [Google Scholar]
- Ramli, W.N.S.; Ishak, S.; Najwa, F. A study on advance stop line for motorcyclists at signalised intersection in Malaysia. Adv. Transp. Logist. Res. 2021, 3, 861–868. [Google Scholar]
- Hsu, C.-K.; Lee, T.-C.; Wong, K. Kinematic Characterization of Risky Riding Behavior of On-Demand Food-Delivery Motorcyclists in Taiwan. Transp. Res. Rec. J. Transp. Res. Board 2023, 2677, 036119812311688. [Google Scholar] [CrossRef]
- Hsu, C.-K.; Lee, T.-C.; Io Wong, K. Time is money: Effects of time-sensitive incentive on risky driving among on-demand food-delivery motorcyclists in Taiwan. Saf. Sci. 2024, 176, 106549. [Google Scholar] [CrossRef]
- Kwangsukstith, S.; Surawattanasakul, V.; Mahakkanukrauh, C.; Panumasvivat, J.; Sirikul, W.; Kitro, A.; Siviroj, P. Major injuries and associated factors in traffic accidents among motorcycle food delivery riders during the COVID-19 pandemic in Thailand. Heliyon 2024, 10, e39032. [Google Scholar] [CrossRef]
- Molo, M.; Changsan, S.; Madares, L.; Changkwanyeun, R.; Wattanasoei, S.; Vittaporn, S.; Khamnuan, P.; Pongpan, S.; Pooseesod, K.; Saita, S. A decision tree model for traffic accident prediction among food delivery riders in Thailand. Epidemiol. Health 2024, 46, e2024095. [Google Scholar] [CrossRef]
- Prakobkarn, P.; Luangwilai, T.; Prempree, P.; Kunno, J. Prevalence of motorcycle accidents among food delivery drivers and its relation to knowledge, attitudes, and practices in urban areas in Bangkok, Thailand. PLoS ONE 2024, 19, e0303310. [Google Scholar] [CrossRef]
- Sanghatawatana, P.; Liang, J.; Kaewkluengklom, R.; Chalermpong, S. Analysis of Risky Driving Behaviors and Self-Reporting Incidents Among Different Types of Motorcycle Drivers in Bangkok. SSRN 2023. [Google Scholar] [CrossRef]
- McPherson, C.; Eady, J.; Daff, M.; Wigan, M. Road Space Initiatives for Motorcycles; SB18859 Part B; SKM: Melbourne, Australia, 2010. [Google Scholar]
- Allen, D.; Bygrave, S.; Harper, H. Behaviour at Cycle Advanced Stop Lines; PPR240; TRL Limited: Crowthorne, UK, 2005. [Google Scholar]
- Atkins Services. Advanced Stop Line Variations Research Study; 503 1271; Atkins: London, UK, 2006. [Google Scholar]
- Asaithambi, G.; Sivanandan, R. Microscopic Simulation for Modeling Exclusive Stopping Space for Motorcycles under Non-lane Based Mixed Traffic Conditions. Eur. Transp. Trasp. Eur. 2015, 57, 1–13. [Google Scholar]
- Santamariña-Rubio, E.; Pérez, K. Methods to evaluate the effectiveness of advanced stop lines for motorcycles in improving road safety. MethodsX 2021, 8, 101267. [Google Scholar] [CrossRef] [PubMed]
- Le, T.Q.; Asih Nurhidayati, Z. A Study of Motorcycle Lane Design in Some Asian Countries. Procedia Eng. 2016, 142, 291–297. [Google Scholar] [CrossRef]
- Yue, W.; Li, C.; Chen, Y.; Duan, P.; Mao, G. What is the Root Cause of Congestion in Urban Traffic Networks: Road Infrastructure or Signal Control? IEEE Trans. Intell. Transp. Syst. 2022, 23, 8662–8679. [Google Scholar] [CrossRef]
- Kronprasert, N.; Sutheerakul, C.; Satiennam, T.; Luathep, P. Intersection Safety Assessment Using Video-Based Traffic Conflict Analysis: The Case Study of Thailand. Sustainability 2021, 13, 12722. [Google Scholar] [CrossRef]
- Muttart, J.W.; Peck, L.R.; Guderian, S.; Bartlett, W.; Ton, L.P.; Kauderer, C.; Fisher, D.L.; Manning, J.E. Glancing and Stopping Behavior of Motorcyclists and Car Drivers at Intersections. Transp. Res. Rec. 2011, 2265, 81–88. [Google Scholar] [CrossRef]
- Mohd Zulkiffli, N.S.; Ho, J.S.; Hamidun, R.; Roslan, A.; Nemmang, M.S.; Mhd Yunin, N.A.; Syed Tajul Arif, S.T.M.; Harun, N.Z. Motorcyclists’ Stopping Position at 4-Legged Signalised Intersections. Construction 2023, 3, 163–171. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Kosun, C.; Ozdemir, S. An Entropy-Based Analysis of Lane Changing Behavior: An Interactive Approach. Traffic Inj. Prev. 2016, 18, 441–447. [Google Scholar] [CrossRef]
- Shao, Y.; Han, X.; Wu, H.; Claudel, G.C. Evaluating Signalization and Channelization Selections at Intersections Based on an Entropy Method. Entropy 2019, 21, 808. [Google Scholar] [CrossRef]
- Huang, P.; Ding, H.; Chen, H. An entropy-based model for quantifying multi-dimensional traffic scenario complexity. IET Intell. Transp. Syst. 2024, 18, 1289–1305. [Google Scholar] [CrossRef]
- Sui, X.; Zhang, Y. Entropy-based Traffic Congestion Propagation Pattern Mining with GPS Data. In Proceedings of the 2021 IEEE 6th International Conference on Big Data Analytics (ICBDA), Xiamen, China, 5–8 March 2021; IEEE: New York, NY, USA, 2021; pp. 128–132. [Google Scholar]
- Owais, M.; Abulwafa, O.; Abbas, Y. When to Decide to Convert a Roundabout to a Signalized Intersection: Simulation Approach for Case Studies in Jeddah and Al-Madinah. Arab. J. Sci. Eng. 2020, 45, 7897–7914. [Google Scholar] [CrossRef]
- Owais, M.; El Sayed, M.A. Red light crossing violations modelling using deep learning and variance-based sensitivity analysis. Expert Syst. Appl. 2025, 267, 126258. [Google Scholar] [CrossRef]
- Department of Rural Roads. Guidelines for Bicycle and Motorcycle Priority Areas at Signalized Intersections (Bike Box); Bureau of Road Safety, Department of Rural Roads: Bangkok, Thailand, 2020. [Google Scholar]
- Department of Highways. Guidelines for the Development of Bicycle Facilities; Bureau of Road Safety, Department of Highways: Bangkok, Thailand, 2015. [Google Scholar]
- Sutandi, A.; Siregar, D. Evaluation of Exclusive Stopping Space for Motorcycle at Signalized Intersections in Large Cities in Indonesia. MATEC Web Conf. 2017, 103, 08007. [Google Scholar] [CrossRef]
- Mulyadi, A.M.; Amelia, S. Influence of red motorcycle box to the traffic conflict and traffic flow at the Ahmad Yani-Laswi signalized intersection. In Proceeding of the 16th International Conference Road Safety on Four Continents (RS4C 2013), Beijing, China, 15–17 May 2013; Statens väg-och transportforskningsinstitut: Linköping, Sweden, 2013. [Google Scholar]
- Mulyadi, A.M. Red Box Motorcycle Evaluation at Signalized Intersection in Denpasar Bali. J. East. Asia Soc. Transp. Stud. 2019, 13, 1966–1982. [Google Scholar]
- Madsen, T.K.O.; Charlotte, T.; Vingaard, O.A.; Tove, H.; Lahrmann, H. Advanced stop boxes and their effect on traffic conflict rates between cyclists and turning vehicles. J. Transp. Saf. Secur. 2022, 14, 1731–1749. [Google Scholar] [CrossRef]
- Kariyana, M.; Suthanaya, P.; Wedagama, D.; Ariawan, I.M.A.; Dissanayake, D. The influence of motorcycle behavior on saturation flow rate at signalized intersections with and without exclusive stopping space for motorcycle (ESSM). IOP Conf. Ser. Earth Environ. Sci. 2021, 673, 012020. [Google Scholar] [CrossRef]
- Lin, Y.; Liu, Y.; Tang, L.; Zheng, S.; Chen, B.; Yang, H. Bicycle Crossing Design and Signal Control Optimization for the Symmetric Intersection. In Proceeding of the 2021 6th International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 22–24 October 2021; IEEE: New York, NY, USA, 2021; pp. 406–414. [Google Scholar]
- Pasakorn, K.; Thaned, S.; Wichuda, S.; Pathompong, S. Evaluation Study on Start-up Lost Time Reduction of Exclusive Stopping Space for Motorcycle at Signalized Intersections. KKU Res. J. 2021, 22. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Intersection | Lane Width (m) | No. of Lanes | Left-Turn Lane? | Cycle Length (s) | Motorcycle Box? | Speed (km/h) | Median? | Lane-Filtering Rates (%) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Rincome | 3.2 | 5 | Yes | 260 | Yes | 12.4 | Yes | 75.3 |
| 2 | Chang Hua Lin | 3.4 | 2 | No | 150 | No | 15.2 | No | 84.6 |
| 3 | Hai Ya | 3.4 | 3 | Yes | 80 | Yes | 12.9 | Yes | 82.5 |
| 4 | Khuang Singh | 4.5 | 3 | No | 380 | Yes | 17.6 | No | 70.1 |
| 5 | Fa Thani | 3.2 | 2 | Yes | 115 | Yes | 16 | Yes | 84.2 |
| 6 | Airport | 3.2 | 4 | No | 200 | No | 20.3 | No | 85.8 |
| 7 | Pa Phaeng | 2.9 | 3 | Yes | 105 | Yes | 16.1 | Yes | 65.1 |
| 8 | Ton Phayom | 3.5 | 3 | No | 225 | No | 12.7 | No | 86.9 |
| 9 | Railway Station | 2.6 | 3 | No | 300 | Yes | 13.5 | No | 82.6 |
| 10 | Pracha Samphan | 3.9 | 1 | No | 60 | No | 14.2 | No | 65.7 |
| 11 | Neurological H. | 2.5 | 3 | Yes | 125 | Yes | 12.7 | Yes | 60.4 |
| 12 | Nakornping B. | 2.4 | 2 | Yes | 120 | Yes | 17.6 | Yes | 31.1 |
| Measure | Field Data | Base Model | MC-EDM Model | ||
|---|---|---|---|---|---|
| Value | %Difference | Result | Deviation (%) | ||
| Vehicle Count (veh/h) | 689 | 658 | −4.50% | 685 | −0.58% |
| Motorcycle (veh/h/lane) | 263 | 239 | −6.61% | 261 | −0.55% |
| Car (veh/h/lane) | 326 | 319 | −2.15% | 324 | −0.61% |
| Avg. Speed (km/h) | 14.2 | 15.8 | 11.27% | 14.5 | 2.11% |
| MC Filtering Rate (%) | 65.7 | 58.3 | −11.26% | 63.8 | −2.89% |
| Lateral Position Entropy | 1.014 | 1.362 | 34.32% | 1.052 | 3.75% |
| RMSE (Vehicle Trajectory) | – | 2.74 | – | 0.92 | – |
| Measure | Field Data | Base Model | MC-EDM Model | ||
|---|---|---|---|---|---|
| Value | %Difference | Result | Deviation (%) | ||
| Vehicle Count (veh/h) | 1628 | 1571 | −3.50% | 1620 | −0.49% |
| Motorcycle (veh/h/lane) | 312 | 303 | −2.88% | 301 | −3.53% |
| Car (veh/h/lane) | 526 | 513 | −2.47% | 507 | −3.61% |
| Avg. Speed (km/h) | 16.2 | 15.1 | −6.79% | 15.3 | −5.56% |
| MC Filtering Rate (%) | 75.3 | 66.8 | −11.29% | 73.5 | −2.39% |
| Lateral Position Entropy | 1.142 | 1.364 | 19.44% | 1.187 | 3.94% |
| RMSE (Vehicle Trajectory) | – | 3.82 | – | 1.18 | – |
| Measure | Field Data | Base Model | MC-EDM Model | ||
|---|---|---|---|---|---|
| Value | %Difference | Value | %Difference | ||
| Vehicle Count (veh/h) | 1955 | 1872 | −4.25% | 1903 | −2.66% |
| Motorcycle (veh/h/lane) | 425 | 391 | −8.00% | 404 | −4.94% |
| Car (veh/h/lane) | 616 | 566 | −8.12% | 587 | −4.71% |
| Avg. Speed (km/h) | 14.5 | 15.8 | 8.97% | 14.9 | 2.76% |
| MC Filtering Rate (%) | 82.6 | 65.2 | −21.07% | 78.3 | −5.21% |
| Lateral Position Entropy | 1.075 | 1.483 | 37.95% | 1.128 | 4.93% |
| RMSE (Vehicle Trajectory) | – | 3.58 | – | 1.05 | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wichitphongsa, W.; Kronprasert, N.; Zaw, M.S.; Pisetsit, P.; Satiennam, T. Modeling Riding and Stopping Behaviors at Motorcycle Box Intersections: A Case Study in Chiang Mai City, Thailand. Infrastructures 2025, 10, 97. https://doi.org/10.3390/infrastructures10040097
Wichitphongsa W, Kronprasert N, Zaw MS, Pisetsit P, Satiennam T. Modeling Riding and Stopping Behaviors at Motorcycle Box Intersections: A Case Study in Chiang Mai City, Thailand. Infrastructures. 2025; 10(4):97. https://doi.org/10.3390/infrastructures10040097
Chicago/Turabian StyleWichitphongsa, Wachira, Nopadon Kronprasert, Moe Sandi Zaw, Pongthep Pisetsit, and Thaned Satiennam. 2025. "Modeling Riding and Stopping Behaviors at Motorcycle Box Intersections: A Case Study in Chiang Mai City, Thailand" Infrastructures 10, no. 4: 97. https://doi.org/10.3390/infrastructures10040097
APA StyleWichitphongsa, W., Kronprasert, N., Zaw, M. S., Pisetsit, P., & Satiennam, T. (2025). Modeling Riding and Stopping Behaviors at Motorcycle Box Intersections: A Case Study in Chiang Mai City, Thailand. Infrastructures, 10(4), 97. https://doi.org/10.3390/infrastructures10040097