Abstract
Light detection and ranging (LiDAR) sensors are critical for autonomous vehicles that require unparalleled depth sensing. However, traditional LiDAR designs face significant challenges, including high costs and bulky configurations, limiting scalability and mass-market adoption. By uniquely combining patent and scientometric analysis, this study screened 188 recent LiDAR patents from a dataset of more than two million patents, uncovering strategies to enhance capability and reduce production costs. The key findings highlight the growing emphasis on solid-state architectures, modular designs, and integrated manufacturing processes as pathways to scalable and efficient LiDAR solutions. These insights bridge the gap between scientific advancements and practical implementation, providing stakeholders with a clear understanding of the technological landscape and emerging trends. By identifying future directions and actionable opportunities, this work supports the development of next-generation LiDAR systems, fostering innovation and enabling broader adoption across autonomous vehicles and other sectors.
1. Introduction
Autonomous vehicles and other robotic systems depend on precise environmental sensing to navigate safely and efficiently, necessitating a balance between performance and cost. Light detection and ranging (LiDAR) technology plays the crucial role of measuring distances to objects through laser pulses and their reflections to create real-time 3D maps of the environment [1]. In many scenarios, LiDAR sensors offer superior resolution and depth accuracy compared with cameras [2]. While cameras are more cost-effective, they lack LiDAR’s depth-sensing capabilities [3], especially in low-light or dynamically changing environments [4]. However, current LiDAR systems face critical challenges. These sensors are expensive, bulky, and mechanically complex [5]. They require high energy for signal processing [6] and multiple or rotating sensors to achieve 360-degree coverage [7]. These constraints hinder the scalability of LiDAR for adoption in mass-market systems such as autonomous vehicles.
The increasing prevalence of autonomous systems has intensified the demand for compact, affordable, and reliable LiDAR solutions [8]. Traditional designs that rely on moving parts such as mirrors and motors suffer from low power efficiency, inconsistent signal quality, and high maintenance needs [9]. These challenges exacerbate their cost disadvantage relative to cameras [10]. While recent advancements in solid-state and compact configurations have addressed some issues [11], the tradeoff between cost and performance persists, limiting widespread adoption [12].
The goal of this study is to systematically analyze recent LiDAR patents, tailored to autonomous vehicle applications, to identify innovations addressing challenges such as cost, size, and capability. Previous studies have explored various facets of LiDAR development, ranging from hardware miniaturization to algorithmic fusion with camera systems. However, most of those studies focused on academic or laboratory settings without assessing their commercial readiness or adoption trajectory. In contrast, this study is unique in applying a systematic patent and scientometric analysis to uncover not only technological innovations but also their alignment with market trends and cost–performance tradeoffs. This approach enables a forward-looking understanding of practical, scalable solutions, distinguishing this work from prior literature that often lacks an industry-oriented lens.
The contributions of this work are as follows:
- 1.
- Problem Analysis: An in-depth exploration of technical barriers in current LiDAR systems, focusing on cost, size, capability, and operational efficiency.
- 2.
- Solution Landscape: A thematic categorization of innovations in cost/size reduction, field-of-view (FOV) enhancement, signal quality improvement, and beam steering.
- 3.
- Comparative Evaluation: An assessment of how these solutions address specific challenges, highlighting the most impactful techniques and their implications.
- 4.
- Future Directions: Suggestions for advancing LiDAR development, identifying gaps, and proposing areas for further research and innovation.
To systematically reveal the development trends and technical characteristics of LiDAR technologies, this study systematically screened recent patents. The author categorized them into thematic innovation domains and quantified their technical features. The scientometric approach aimed to uncover temporal patterns, prominent contributors, collaboration structures, and emerging trends. This methodological framework provided a structured pathway to identify critical technological developments and their alignment with industry priorities.
The rest of this paper proceeds as follows: Section 2 reviews the literature on LiDAR technologies with a focus on their utility and challenges. Section 3 presents the methodology developed for the combined systematic patent and scientometric analysis, including the research questions they address. Section 4 presents the results of the analysis in terms of the temporal and categorical themes revealed, plus a detailed comparative evaluation of specific patents within each category. Section 5 discusses the key findings, future directions, and limitations of this study. Section 6 concludes this research and reviews its contributions.
2. Literature Review
Recent years have seen rapid advances in LiDAR technology, particularly as autonomous systems demand better environmental awareness and real-time 3D sensing capabilities [13]. This section organizes prior work across four thematic domains: technological advancements, market demands, prevailing challenges, and emerging solutions.
2.1. Technological Advancements
LiDAR systems are now categorized by scanning mechanisms (mechanical vs. solid-state) [14], operational platforms (airborne, terrestrial, mobile) [15], and light modulation techniques [16]. Time-of-flight (ToF) systems measure distances by calculating the time laser pulses take to return after reflecting from an object [17]. On the other hand, frequency-modulated continuous wave (FMCW) systems analyze frequency shifts to determine both distance and velocity, offering higher sensitivity and improved dynamic object tracking [18]. These advances have expanded LiDAR’s utility in applications requiring precise depth measurement and situational awareness, particularly in the motion planning [19] and parking of autonomous systems [20]. Solid-state innovations such as MEMS mirrors [21], optical phased arrays (OPAs) [22], and flash LiDAR offer greater durability and miniaturization [23].
2.2. Market Demands
The increasing push for cost-effective [24], reliable, and scalable sensor solutions [25] has come from sectors such as autonomous vehicles, robotics, and smart infrastructure. These applications demand compact sensors [26] with wide field-of-view (FOV) [27], high resolution, and low power consumption [28].
2.3. Challenges
Despite progress, challenges persist. Issues such as mechanical complexity, high cost, energy consumption, limited FOV, and environmental adaptability continue to constrain widespread adoption [29]. Eye safety regulations also limit power levels for some laser types, further complicating design.
2.4. Proposed Solutions
Academic research has proposed solutions such as single-photon detectors, sensor fusion with cameras, and deep learning-based signal processing [29]. However, most of these are evaluated in controlled environments and not yet widely reflected in commercially adopted designs.
This study addresses a gap in the current literature by evaluating innovations directly from the patent landscape, offering insights into commercially feasible approaches that tackle these enduring issues. That is, unlike traditional reviews that emphasize academic research and experimental results, this patent analysis applied big data analytical methods to highlight industry trends, providing actionable insights into the evolution of LiDAR technology. Furthermore, by thematically categorizing innovations into distinct technical domains, this study offers a comprehensive understanding of how LiDAR advancements are shaping the future of autonomous systems.
3. Methodology
Figure 1 illustrates the methodological workflow developed for the multifaceted patent analysis.
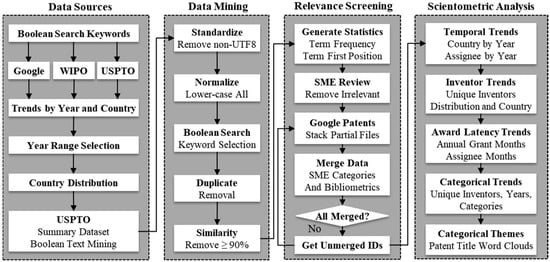
Figure 1.
The staged workflow developed for the multifaceted analysis.
The main stages of the workflow include evaluating data sources, data mining, topic relevance screening by a subject matter expert (SME), thematic categorization, and scientometric analysis with cross-sectional visualizations of trends. The subsections that follow provide a detailed description of each stage in this workflow.
3.1. Data Sources
The workflow utilized four patent data sources: the Google Patents (GP) search engine [30], the World Intellectual Property Organization (WIPO) search tool (PATENTSCOPE) [31], the United States Patent and Trademark Office (USPTO) search tool [32], and the USPTO patent summary dataset [33]. The rationale for using these multiple sources was to ensure broad coverage and cross-validation of results, particularly to mitigate the limitations of any single database. The GP search engine scans the full text of patents from around the world. PATENTSCOPE searches databases from participating national and regional patent offices around the world. The USPTO search tool searches USPTO-issued patents that includes priority filings by foreign organizations seeking to protect their intellectual property in U.S. markets. The USPTO patent summary dataset contains monthly summaries of all issued patents. These summaries utilize SMEs to capture the core problem and solution of the invention, providing a complementary alternative to patent descriptions that rely heavily on legal jargon. Unfortunately, the patent summaries contain only the patent number and a summary text, lacking other information such as titles, assignees, and dates.
The Boolean search strategy was grounded in domain-specific terminology to identify patents relevant to cost-sensitive LiDAR sensor designs tailored for autonomous vehicle environments. The “AND” keyword set—[“lidar”, “vehicle”, “distance”, “cost”]—captured core technical and application-related aspects. The wildcard character ‘*’ is used to capture variations of the word. The “OR” keyword set—[“autonomous”, “driverless”, “driver-less”, “self-driving”]—reflected commonly used descriptors of self-navigating systems, thereby expanding the scope to capture a variety of linguistic representations. To ensure data representativeness and completeness, the workflow included all results from 2018 through 2024 across the three search engines, recognizing that 2018 marked a sharp increase in LiDAR patent activity. Table 1 lists the search commands and number of hits for each data source.

Table 1.
Search engines, their tailored search commands, and the results.
The USPTO search resulted in 524 patents, with 368 of those having the same family identifier (FID), which are groups of related patents. The FID is a unique identifier assigned to a group of patents that share the same basic invention or technology, even if they have different patent numbers. The Python (version 3.13.2) script found 867 patent summaries based on the Boolean keyword search. The larger number of matches relative to the USPTO search engine reflected that the former could not search titles for the keyword “lidar” whereas the latter could, thus effectively narrowing the search.
Figure 2a,b plots the results from the GP and WIPO search engines, respectively. The horizontal axis labels the intellectual property office of the country or region. PCT indicates the international patent applications granted under the Patent Cooperation Treaty. EPO indicates the patent applications granted by the European Patent Office. The WIPO results include only countries that shared their national or regional data with the organization. It is apparent that WIPO provides a fair representation of patents issued by the USPTO, PTC, and the EPO. However, the WIPO data significantly underrepresent patents issued by other offices, particularly China. Both GP and WIPO produced a comparable result for USPTO of 931 and 978, respectively.
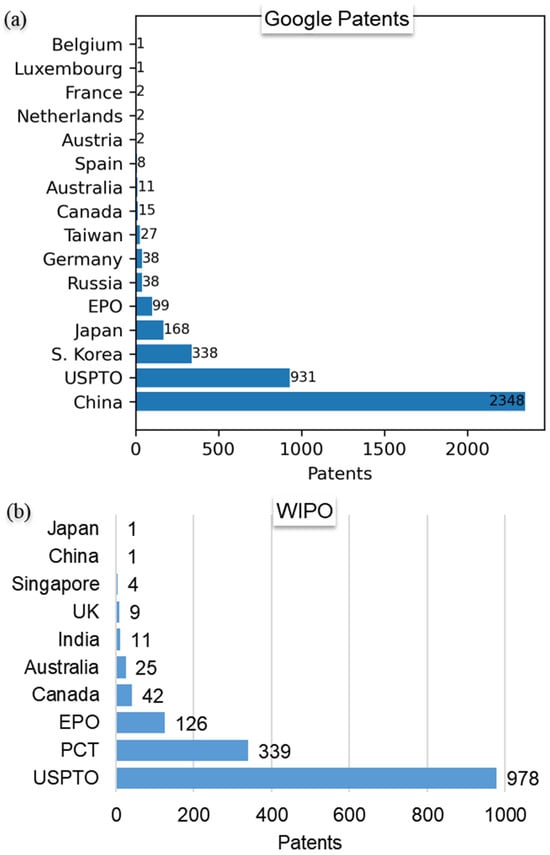
Figure 2.
Results from the (a) Google Patents and (b) WIPO search engines.
A further examination of the GP data subset of patents issued by the China patent office revealed that they contained many international filings, particularly from organizations in the United States. Unfortunately, the assignee names were not in English, making that subset incompatible with the workflow. In addition to U.S. assignees, the USPTO grants also included patents filed by organizations headquartered in other countries, including China, South Korea, Japan, and European countries. These patents typically claimed priority dates from filings at non-USPTO patent offices. Figure 3 plots the assignee countries of the USPTO search results, revealing that more than 31% were outside the U.S. It is important to note that this figure represents only the assignee country distribution within the USPTO-granted patents identified by the search criteria. It does not reflect the total number of LiDAR-related patents filed globally but rather those from both domestic and international organizations that sought protection in the U.S. market. This finding reflects that foreign countries tend to file their most valuable patents for protection in the lucrative U.S. markets. Given that the WIPO results showed USPTO patents dominated, and that the USPTO patents included a significant number of important filings from non-U.S. countries, particularly China, it served as a balanced sample of worldwide innovations in LiDAR development.
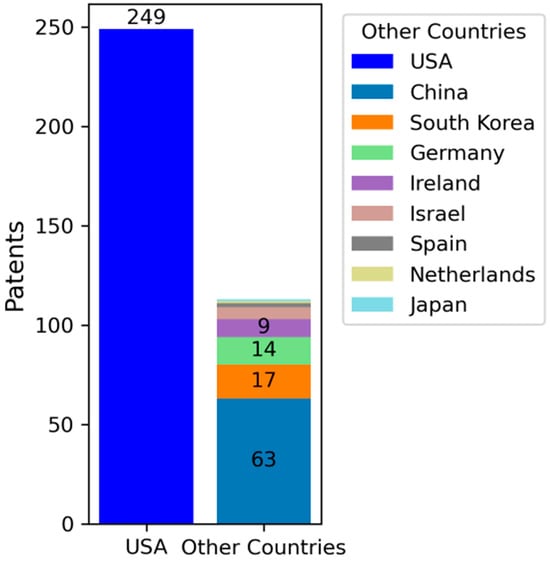
Figure 3.
Assignee country for the USPTO patent search results.
3.2. Data Mining
The workflow conducted a multi-step data cleaning process. A Python script first filtered for documents containing all “AND” keywords, followed by those containing at least one “OR” keyword. The workflow removed duplicate entries and discarded highly similar summaries with over 90% content match. The author then manually reviewed all remaining documents to assess actual relevance beyond keyword occurrence, excluding those unrelated to LiDAR sensor designs. To enhance analytical depth, the screening process prioritized patents that demonstrated unique technical approaches, integration readiness, or applicability across multiple LiDAR use cases. These are factors often associated with high-impact inventions. This prioritization ensured that the subsequent evaluation focused on the most influential developments within the dataset. The resulting dataset consisted of 188 patents deemed highly relevant to the study objectives and suitable for scientometric analysis.
Table 2 shows the results of mining the USPTO summary dataset and refining them to discern unique and relevant patents. The Python script processed more than two million patent summaries and found 867 patents matching the search criteria. Of those, removing duplicates and summaries that were more than 90% similar resulted in 736 patents for further scrutiny. Adding statistics for the frequency and position of the “AND” keywords helped to prioritize screening. That is, highly relevant documents tended to be associated with “AND” keywords having a high frequency and early position in the text.
Table 2.
USPTO patent summary data extraction and refinement.
Unlike the USPTO patent summaries, the document information list from the GP and WIPO searches lacked patent abstracts or descriptions. However, the list contained patent titles, the names of assignees and inventors, filing dates, and publication dates. Hence, the workflow merged the summaries of the relevant patents with their bibliometric information obtained from the GP search engine. As shown in the workflow diagram, this was an iterative process because the GP downloads tended to miss patents when given long lists of patent numbers to retrieve. After the merging in each iteration, the author identified any unmerged patents and repeated the GP search until finding all the patents.
3.3. Scientometric Analysis
Scientometric analysis refers to the analysis of patterns in the scientific literature through quantitative methods [34]. This study leveraged patent data to assess innovation trends, collaborations, and research impact. The scientometric analysis sought to answer the following research questions about LiDAR patent trends, with the figures addressing them forward referenced in parentheses:
- 1.
- What is the annual patent award trend and how did those distribute among U.S.-based and foreign-based assignee countries? (Figure 4)
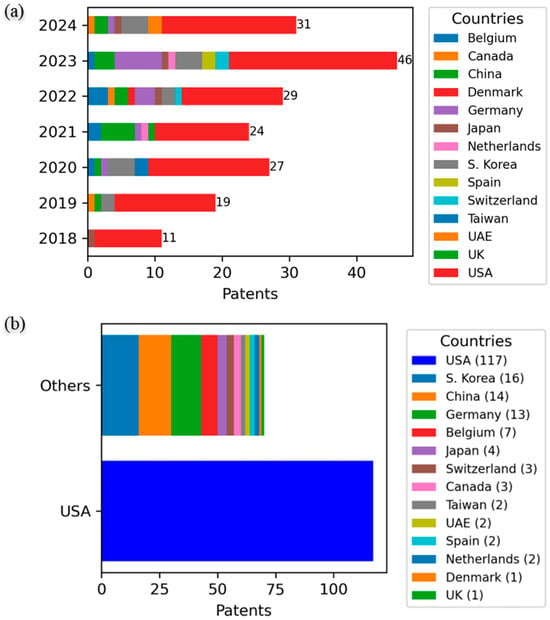 Figure 4. Number of relevant patents by (a) year and (b) assignee country (see legend).
Figure 4. Number of relevant patents by (a) year and (b) assignee country (see legend). - 2.
- What is the average number of inventors per patent and how is that distributed? (Figure 8a)
- 3.
- How does the number of unique inventors on U.S.-based assignee patents compare with the aggregate of non-U.S. assignees? (Figure 8b)
- 4.
- What is the typical timing from filing to patent grant, how is that latency distributed, and were there any annual trends in that latency? (Figure 9)
- 5.
- Who were the top assignees based on the number of patent awards, and what is their annual trend? (Figure 10)
- 6.
- Were there significant differences in the filing to grant timing for the top assignees? (Figure 11)
- 7.
- Which thematic categories had the most patent activity, and were there any notable differences in their average award latency? (Figure 12)
- 8.
- Which thematic categories did the top assignees focus on? (Figure 13)
- 9.
- What was the annual trend in patents awarded across the distinct thematic categories? (Figure 14)
- 10.
- How did the number of inventors vary across thematic categories? (Figure 14)
Overall, this methodology aimed to provide insights into the dynamic landscape of technological progress in LiDAR development by identifying patterns of activity, key contributors, and emerging areas of focus.
4. Results
The subsections that follow present the results of the analysis in terms of the temporal trends and assignee countries, thematic categorization, comparative evaluation of selected patents within each category, and the scientometric outcome addressing the research questions posed earlier in the methodological section.
4.1. Temporal Trends
Figure 4 shows the distribution of the final tally of patents by (a) year and (b) assignee countries. The trend in Figure 4a shows a steady increase in the number of issued patents with a peak in 2023. In answering the first research question (RQ 1), Figure 4b shows that grants to U.S.-based assignees accounted for 62.6% of the patents, with grants to assignees from other countries accounting for the rest. Of those, assignees in South Korea, China, and Germany dominated.
An interesting trend is that there was a steady annual increase in the share of patents awarded to non-U.S. assignees. The share was 9% in 2018 and grew at an annual average pace of 10%, peaking at 48% in 2022. This result highlights an increasing balance of the global representation of patent assignees in the USPTO database.
4.2. Thematic Clustering
Figure 5 is a term co-occurrence network produced by the VOSviewer software (version 1.6.20) to visualize document clusters based on common technical themes [35]. The figure reveals key relationships and thematic clusters within the analyzed LiDAR patent corpus. These clusters both informed and validated the technical classification.
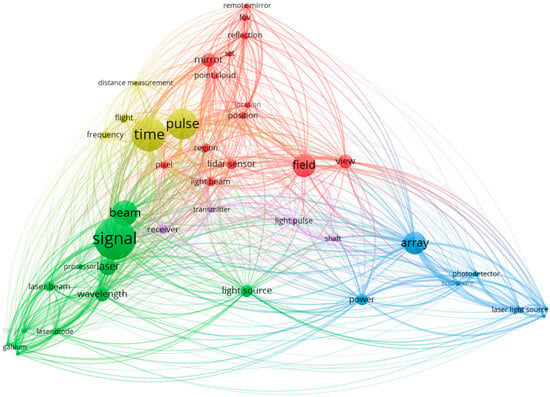
Figure 5.
Co-occurrence network of terms within the corpus.
The bubble size reflects the term frequency across the entire corpus. The thickness of lines that connect terms reflect their relative co-occurrence frequency in the corpus. The colors represent thematic clusters based on term co-occurrence. These distinct clusters represent core concepts such as “beam” and “signal” (green), “array” and “power” (blue), “field” and “view” (red), and “time” and “pulse” (yellow). These clusters suggest thematic priorities, including beam shaping, signal processing, and optimization of light arrays. Key insights include the centrality of “time” and “pulse”, highlighting their importance in the ToF measurement approach. Additionally, the link between “array” and “power” suggests innovations focusing on photodetector arrays and energy efficiency, vital for autonomous vehicle integration. The interconnectedness of “field” and “view” reflects ongoing improvements in FOV expansion and spatial resolution, essential for autonomous navigation. This network also reveals a convergence of themes aimed at performance optimization, miniaturization, and scalability for future LiDAR applications.
After diligently reviewing all the relevant patents in greater detail, and with insights from the term co-occurrence network, the author grouped the patents into the following five thematic categories: beam generation, beam steering, FOV enhancement, signal quality, and cost/size reduction. As observed, the clusters do have some overlap. Nevertheless, the classification reflects the primary goal of an invention. For example, combining the outgoing and incoming optical pathways to reduce misalignment also led to improving the quality of the return signal while also reducing both size and cost due to the design simplification.
Figure 6 is a word cloud of patent titles within each thematic category, providing further validation of the themes identified. The word clouds highlight characteristic bigrams within each thematic cluster. The font sizes reflect the relative frequency of the bigrams. These visualizations complement the term co-occurrence network in validating the quality of the thematic classification. The “Beam Generation” cluster emphasizes special types of semiconductor-compatible lasers like “gallium nitrogen” to simultaneously provide illumination and sensing functionalities. The “Beam Steering” cluster emphasizes advancements like “dynamic scan” and “phased array”, signifying efforts to improve scanning flexibility and resolution. In “Signal Quality”, terms such as “multiple pulse” and “adaptive receiver” point to improvements in data acquisition and noise reduction. The “Cost/Size Reduction” cluster, with terms like “rotating compact” and “integrated illumination”, highlights miniaturization and integration efforts that are critical for commercial scalability in autonomous vehicles.
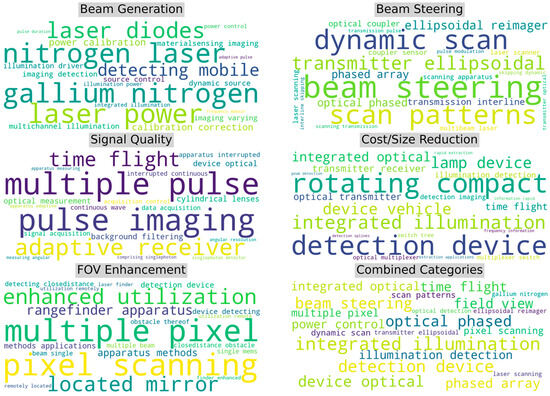
Figure 6.
Word cloud of the most frequent bigrams for documents within each category.
The “FOV Enhancement” cluster focuses on “multiple pixel” and “pixel scanning”, reflecting inventions to increase spatial awareness. FOV refers to the observable area a LiDAR system can cover. Enhancing the FOV involves expanding this area to improve spatial awareness and eliminate blind spots.
Figure 7 illustrates the frequency distribution of the top 10 bigrams across categories, quantifying the word cloud with a complementary view of their distributions. The “Beam Steering” and “FOV Enhancement” categories display step-like distributions, where the top terms like “beam steering” and “multiple pixel” dominate, indicating a concentrated focus on these critical functionalities. In contrast, “Beam Generation” and “Signal Quality” show more uniform distributions, suggesting a broader range of terms and diverse research efforts in improving laser sources and signal processing.
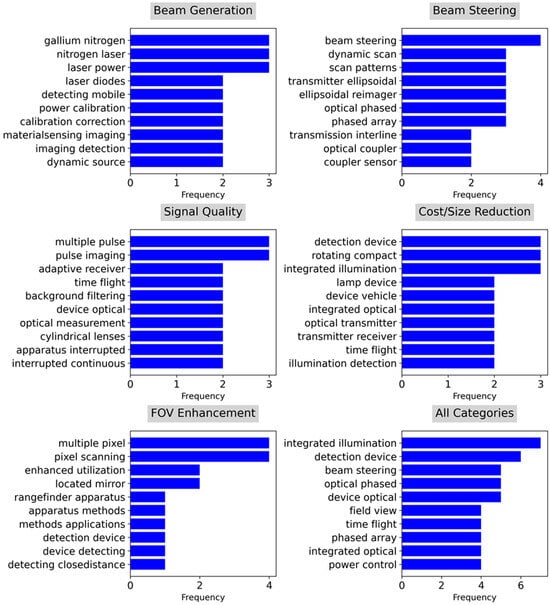
Figure 7.
Distribution of the top 10 bigrams for documents within each category.
The “Cost/Size Reduction” category features a more balanced distribution, with top terms like “detection device”, “rotating compact”, and “integrated illumination”, reflecting efforts in miniaturization and integration. The distribution of the aggregated “All Categories” emphasizes terms such as “integrated illumination” and “detection device”, reinforcing the significance of integration and compact designs for LiDAR’s commercial viability in autonomous vehicles. Collectively, these patterns highlight the evolving priorities in addressing the technological and economic challenges of LiDAR development.
4.3. Comparative Evaluation
The author selected the patents highlighted in this section not only for their thematic relevance but also for their novelty, technical maturity, and commercial potential. This selection distinguishes high-impact innovations from more incremental filings.
4.3.1. Beam Generation
Table 3 summarizes distinct beam generation solutions selected from patents in this category.
Table 3.
Sample of patents in the beam generation category.
These patents reflect diverse, adaptive approaches to controlling laser output characteristics, each aimed at enhancing performance across specific operational contexts. Feedback-driven mechanisms, such as those adjusting pulse duration or repetition rates based on real-time data, improve power efficiency, detection precision, and adaptation to varying environmental conditions. Some systems dynamically optimize pulse patterns and charge profiles to manage energy use and reduce heat, maintaining high point cloud density without unnecessary resolution. Advanced materials, like gallium-nitrogen laser diodes, enable both illumination and high-resolution mapping through wavelength conversion and beam shaping for autonomous sensing and communication functions. Polarization techniques, gate delays, and phase-coded modulations further refine performance by mitigating interference, enhancing resolution, and increasing signal-to-noise ratios across extended ranges.
Other inventions in this category employ non-uniform sampling or orthogonal code sequences to prioritize distant targets and allow high-resolution depth estimation with simpler receiver architectures. Frequency-modulated systems and optical grating arrays enhance road surface analysis by detecting anomalies via power-distance profiles. Collectively, these innovations showcase a trend toward precision-controlled laser outputs that optimize power use, improve target resolution, and enhance the adaptability of LiDAR sensors in complex and dynamic environments. These findings suggest that the industry increasingly prioritizes adaptive, software-defined light emission methods to handle diverse operating environments without increasing system complexity. Such trends support the development of energy-efficient, high-resolution systems suitable for integration into mass-market autonomous platforms.
4.3.2. Beam Steering
Table 4 summarizes distinct beam steering solutions sampled from patents in this category. These patents exhibit a broad array of methods focused on enhancing scanning precision, adaptability, and efficiency. Some systems use dynamically controlled mirrors and selective scan patterns like interline skipping or Lissajous scanning to concentrate on critical regions, offering high-resolution adaptability in complex environments. Innovations employing digital micro-mirror devices and spatial light modulators enable patterned light emission without mechanical parts, which also reduces size, maintenance, and power requirements.
Table 4.
Sample of patents in the beam steering category.
OPAs are solid-state beam steering devices that use the interference of light waves emitted from multiple emitters to control the direction of the output beam electronically, without mechanical movement. That is, OPAs, integrated with wavelength-tunable controls and diffraction elements, allow precise, electronic beam steering while minimizing physical components. Systems using novel optics, such as variable angle multi-facet polygons, rotating prisms, and ellipsoidal mirrors, provide multi-angle or omni-directional scanning, enhancing spatial coverage with minimal structural complexity. Additionally, planar photonic structures, including Luneburg lenses and scattering waveguides, enable 360-degree coverage with low energy consumption.
Advanced configurations, such as dual MEMS mirrors and closed-loop feedback-controlled arrays, allow real-time adjustments for optimal range and reduced latency. Collectively, these approaches exemplify a move toward versatile, reliable, and high-resolution LiDAR systems optimized for dynamic and application-specific environmental demands. The widespread use of solid-state beam steering techniques highlights a shift toward maintenance-free LiDAR systems that can meet automotive durability standards. This trend indicates a growing readiness for commercial deployment in harsh and unpredictable environments.
4.3.3. FOV Enhancement
Table 5 summarizes distinct FOV enhancement solutions sampled from the patents in this category. These patents demonstrate varied approaches aimed at broadening coverage, improving resolution, and enabling adaptability in complex and dynamic environments. Systems leveraging remote mirrors within the FOV allow for indirect reflection-based 3D ranging, effectively expanding coverage in obstructed regions and enhancing blind-spot detection. Modular and distributed LiDAR setups employ strategically positioned or remotely relayed LiDAR units to achieve comprehensive 360-degree coverage. Some have overlap control and real-time recalibration for redundancy and adaptability. Techniques such as planar and pixelated light modulators, combined with phase modulation and non-mechanical components, deliver a wide, adjustable FOV with high frame rates and minimal alignment needs. Some systems deploy multi-channel configurations with co-located light sources and scanning mirrors to increase sampling density and expand FOV.
Table 5.
Sample of patents in the FOV enhancement category.
Additionally, optical innovations like planar Luneburg lenses enable wide-angle beam steering in compact formats, while coherent fiber optic bundles relay reflections from remote FOVs to centralized detectors, enhancing coverage and imaging continuity across varied scenarios. These innovations reflect the industry’s demand for panoramic awareness without relying on physically rotating sensors. The use of modular and distributed architectures also implies flexibility in system design, enabling manufacturers to tailor configurations to specific vehicle types and use cases. Together, these innovations contribute to adaptive LiDAR performance that enhances environmental awareness and responsiveness.
4.3.4. Signal Quality
Table 6 summarizes distinct signal quality solutions sampled from the patents in this category. These patents aim to improve detection accuracy, reduce noise, and enhance signal robustness across diverse environments.
Table 6.
Sample of patents in the signal quality category.
Some systems employ adaptive photodetector arrays that selectively activate pixel subsets to minimize noise, extend dynamic range, and enhance precision. Techniques like multi-pulse encoding with diverse coding schemes, such as time and amplitude diversity, help mitigate crosstalk and external noise, ensuring reliable distance measurements, particularly in noisy settings. Synchronization of pulse generation and acquisition, often through unified pulse triggers and dual timing modules, enables precise ToF estimation with minimal alignment complexity. Additionally, DC coupling, temperature-adjusted biasing, and channel multiplexing streamline analog-to-digital conversion, reducing power requirements while maintaining signal consistency.
Integrated designs place illumination, detection, and signal processing on single boards with shared optical paths, minimizing alignment challenges and optimizing point cloud density. Methods using high-frequency phase-shifted range-gating and single-photon detectors offer fine-tuned timing control, enhancing long-range detection capabilities. Calibration methods that leverage natural surfaces like walls and floors, as well as active/passive measurement combinations, help maintain alignment accuracy over time. These inventions further refine signal integrity with low-pass filtering, adaptive bin widths in histograms, and selective segment prioritization, facilitating real-time processing and decision-making. Together, these innovations reflect advancements in signal processing and quality control, essential for the reliable, high-resolution operation of LiDAR across varied applications. The consistent emphasis on encoding, synchronization, and noise suppression reflects the need for reliable data acquisition in real-world driving conditions. These solutions help improve the dependability of LiDAR data for safety-critical tasks such as object detection and collision avoidance.
4.3.5. Cost/Size Reduction
Table 7 summarizes distinct solutions for reducing cost or size, sampled from the patents in this category.
Table 7.
Sample of patents in the cost/size reduction category.
These patents introduce innovative methods to simplify design, reduce manufacturing complexity, and streamline integration for scalable production. These solutions also overlap with some beam generation, beam steering, FOV enhancement, and signal quality enhancement techniques that also contribute to cost/size reduction. However, the dominant aim of these patents was to reduce cost and/or size. A common approach integrates illumination sources, detectors, and processing electronics onto a single substrate or circuit board, optimizing optical paths and enhancing alignment to lower costs and reduce form factors.
Many systems in this category employ vertical-cavity surface-emitting laser (VCSEL) emitters that are compatible with complementary metal oxide semiconductor (CMOS), and single photon avalanche diode (SPAD) detectors. These technologies enable compact designs, improve reliability, and lower production costs by consolidating measurement functions. Wireless power transfer, rotating circuit boards, and optical communication components further eliminate traditional mechanical parts like conductive slip rings and rotating assemblies, reducing wear and simplifying assembly. OPAs and frequency modulation techniques provide solid-state, wide-angle scanning without moving parts, achieving high-resolution 360-degree views while maintaining minimal size and power demands.
Methods using multiplexed optical paths, wavelength division multiplexing, and shared optical pathways integrated with vehicle lighting reduce component count and streamline installation. For example, integrating LiDAR functionality within vehicle headlamps or windshields utilizes existing automotive components, allowing concealed, cost-effective sensing without compromising aesthetics or requiring additional mounting space. Additionally, simplified detector arrays, luminescent waveguides, and efficient signal encoding techniques support high-resolution 3D mapping with minimal hardware requirements. These strategies contribute to LiDAR systems that are compact, reliable, and economically viable, enhancing the feasibility of high-performance autonomous sensing in consumer and commercial applications. The convergence of integration strategies and CMOS-compatible designs demonstrates a maturing trend toward affordable, compact LiDAR units. These innovations are likely to accelerate OEM adoption by lowering production costs and simplifying supply chain logistics for advanced driver-assistance systems (ADAS) and fully autonomous vehicles.
4.4. Scientometric Insights
Figure 8 provides insights into the distribution of inventors contributing to LiDAR patents, segmented by collaboration size and assignee countries. In answering RQ 2, Figure 8a highlights the distribution of inventors per patent, where the average collaboration size was three inventors. Most patents involve two to four inventors, indicating moderately sized research teams, while fewer patents have larger teams of up to ten inventors, suggesting that more extensive collaborations are less common in this domain. Figure 8b shows the distribution of unique inventors across assignee countries, with the United States accounting for the largest share. South Korea, Germany, and China followed with significant inventor contributions. It is important to note that this inventor distribution reflects unique contributors to the USPTO-granted patents identified in this study and does not represent a global count of inventors across all patent offices. In answering RQ 3, the aggregate of unique inventors for non-U.S. assignee countries was comparable with that of U.S.-based assignees. This demonstrates the USPTO dataset reflects a global thrust in LiDAR innovation.
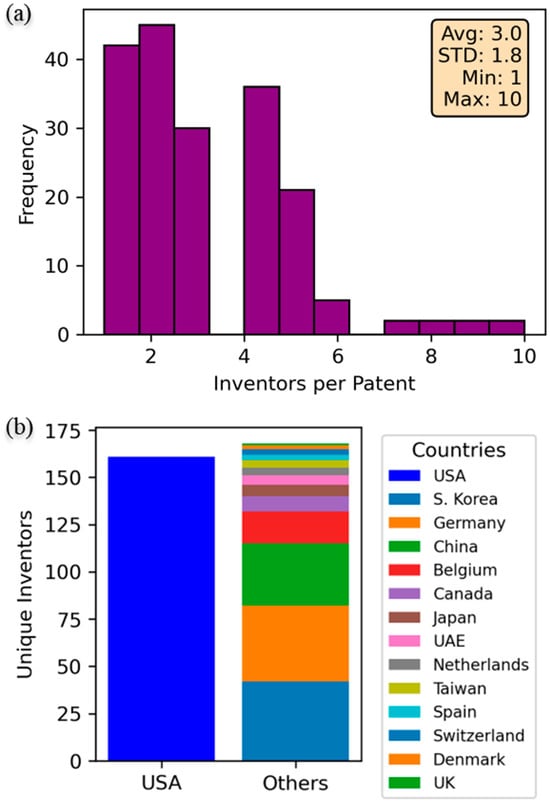
Figure 8.
Bibliometrics insights on (a) the number of unique inventors in the domain and (b) their distribution among assignee countries.
In answering RQ 4, Figure 9 provides a detailed analysis of patent grant latency, examining the time spans between key stages of the patent process for LiDAR technologies. Figure 9a shows the durations from disclosure to filing, with an average of 17.3 months. The distribution skewed toward shorter periods suggests that companies file most patents within two years of disclosure. Figure 9b displays the time from filing to grant, averaging 32.6 months. The distribution peaks between 20 and 40 months, indicating a typical grant process duration, though some patents take longer.
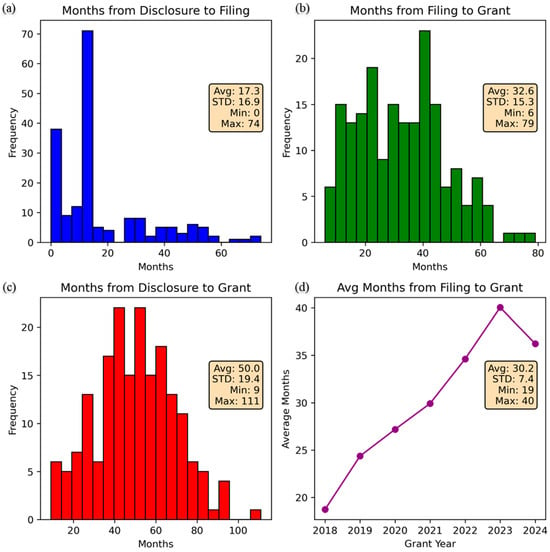
Figure 9.
Bibliometric insights into patent grant latenc. (a) Months from Disclosure to Filing, (b) Months from Filing to Grant, (c) Months from Disclosure to Grant, (d) Avg Months from Filing to Grant.
Figure 9c combines the timelines, illustrating the total time from disclosure to grant, averaging 50 months. The peak occurs around 40 to 60 months, showing a consistent trend of extended timelines in securing patent rights. Figure 9d trends the average months from filing to grant by grant year, showing an upward trajectory from 2018 to 2023, peaking at 40 months. This increase suggests growing complexity, scrutiny, or lack of resources in the patent examination process, reflecting the competitive and evolving nature of LiDAR technology. These metrics highlight the spread of both efficiency and bottlenecks in the innovation pipeline.
In answering RQ 5, Figure 10 illustrates the temporal distribution of patent awards among the top 10 assignees in LiDAR technology from 2018 to 2024. Velodyne leads consistently in patent activity, peaking in 2023 with six patents, highlighting its dominance and commitment to innovation in LiDAR systems. Aeye, Inc. shows notable activity early in the timeline but tapering off later. Other key players, such as Ouster, Inc. and Baidu, exhibit steady activity over time, reflecting sustained research and development efforts. Emerging assignees include Hyundai and Kyocera SLD Laser, which have recently gained prominence. The presence of academic institutions, such as MIT, demonstrates the role of foundational research in advancing LiDAR applications. This temporal pattern highlights both established leaders and growing diversification in LiDAR innovation, pointing to a dynamic and competitive field with significant commercial and academic collaboration.
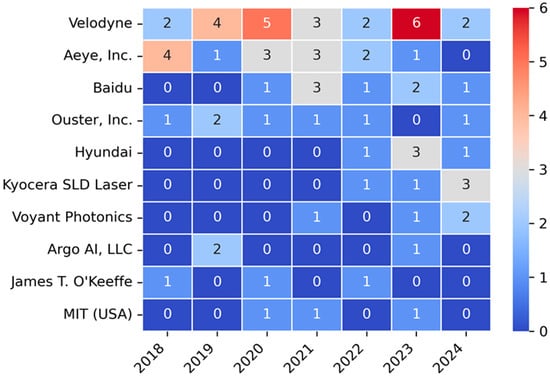
Figure 10.
Top 10 assignees and temporal pattern of awards.
In answering RQ 6, Figure 11 provides an analysis of the top 15 patent assignees by volume and their average filing-to-grant latency. Figure 11a ranks Velodyne as the top assignee with more than 20 patents, followed by Aeye, Inc., Baidu, and Ouster, Inc. Figure 11b examines the average latency from filing to grant for these top 15 assignees. As the top assignee, Velodyne also exhibits one of the shortest average latencies, suggesting streamlined patent approval processes due to a combination of experience, efficient documentation processes, prior art familiarity, and focused resources. In contrast, Baidu and Microvision, Inc. show the longest latency, exceeding 40 months, which may indicate greater complexity or other challenges. This dual analysis reveals the interplay between innovation intensity and patenting efficiency across global industry leaders in LiDAR technologies.
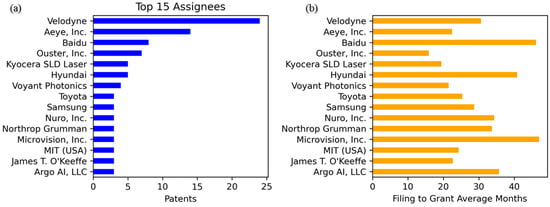
Figure 11.
Top 15 assignees and their average latency to patent awards. (a) Top 15 Assignees, (b) Filing to Grant Average Months.
In answering RQ 7, Figure 12 compares the volume of patents and the average filing-to-grant latency across the thematic categories, providing insights into the focus and efficiency of innovation efforts. Figure 12a reveals “Cost/Size Reduction” as the leading category, reflecting a strong emphasis on reducing the footprint and production costs of LiDAR systems to enable scalability. “Signal Quality” and “Beam Generation” also show substantial patent activity, underlining efforts to enhance performance and reliability.
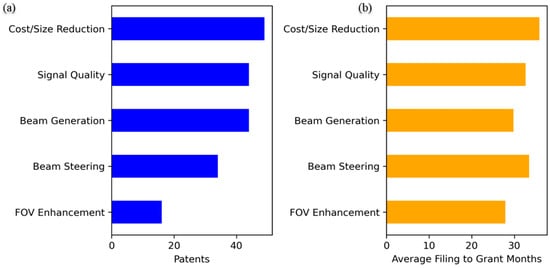
Figure 12.
Patent volume and grant latency by technical categories. (a) the volume of patents, (b) the average filing-to-grant latency across the thematic categories.
In contrast, “FOV Enhancement” has the lowest patent volume, indicating less emphasis in expanding the FOV. Figure 12b shows average filing-to-grant latency by category. All categories exhibit comparable latencies around 30 months, with “Cost/Size Reduction” and “Beam Steering” slightly longer. This consistency indicates uniformity in the examination processes across categories.
In answering RQ 8, Figure 13 illustrates the patent activity focus of the top 10 assignees across the thematic categories. Velodyne shows patent awards across multiple categories, with notable emphasis on signal quality and beam generation. Kyocera also focused on beam generation. In contrast, Aeye, Inc. emphasized beam steering developments, highlighting a targeted effort in enhancing LiDAR adaptability for dynamic environments. Other companies, such as Baidu and Ouster, Inc., demonstrated a focus on cost/size reduction. These patterns indicate a diverse landscape of innovation across organizations and categories.
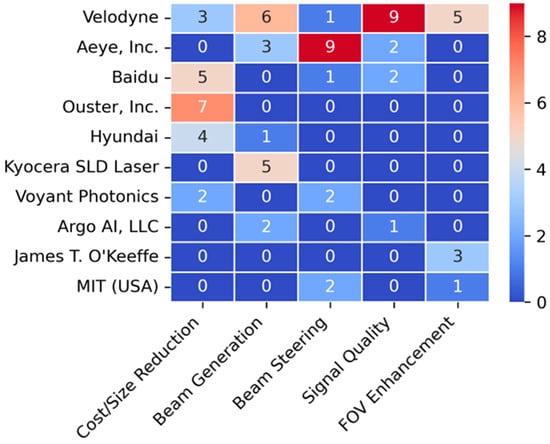
Figure 13.
Assignee activity focus by inventory category.
Figure 14 provides a comprehensive scientometric analysis of LiDAR thematic categories. Figure 14a reveals that “Beam Generation”, “Cost/Size Reduction”, and “Signal Quality” involved the highest numbers of unique inventors, suggesting strong collaborative and multidisciplinary efforts. Figure 14b highlights the proportional relationship between patent volume and inventor participation, with “Cost/Size Reduction” suggesting a strong resource emphasis and “FOV Enhancement” having the lowest activity and participation. In answering RQ 9, Figure 14c tracks the temporal evolution of the awarded patents, showing a sharp increase in “Cost/Size Reduction” from 2022 onward, while other categories maintain steady trends. In answering RQ 10, Figure 14d compares the number of inventors across categories, with ANOVA analysis results indicating statistically significant differences (p = 0.04), highlighting varying levels of collaboration intensity. Collectively, these insights emphasize a focus on innovation to address cost efficiency and signal quality, aligning with the practical demands of autonomous vehicle applications.
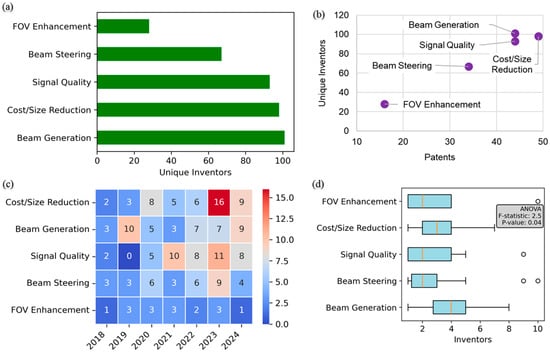
Figure 14.
Scientometric analysis across categories covering (a) unique inventors, (b) emphasis, (c) award trends, and (d) collaborations.
5. Discussions
5.1. Technological Implications by Innovation Category
The diverse range of challenges addressed in LiDAR patents over recent years highlights key barriers in optimizing performance, cost, and reliability across varied autonomous vehicle applications. Many traditional systems struggle with adaptive power management, leading to inefficiencies in dynamic environments. High-power requirements and heat generation in systems aiming for high-resolution 3D mapping are common problems, impacting both operational efficiency and longevity. Additionally, latency and interference in distance measurements, particularly in multi-sensor environments, reduce reliability in applications like autonomous navigation. Advanced LiDAR systems face difficulties with eye safety and interference control, especially in automotive settings, due to the regulatory constraints on the output power of commonly used wavelengths. Also, limitations in component integration, such as complex and costly assemblies of multiple sensors, impede scalability and make mass deployment challenging.
Solutions to these issues vary by category, addressing cost, size, signal quality, FOV enhancement, and beam steering. Cost and size reduction innovations focus on integrating illumination sources, detectors, and signal processing on single substrates or circuit boards, reducing the need for separate, bulky components and enabling miniaturization without compromising performance. Methods such as adaptive photodetector arrays, efficient signal encoding techniques using phased arrays, remote mirrors, and strategic sensor placements can expand coverage and improve resolution without increasing the complexity or cost of traditional mechanical scanning systems. These innovations help LiDAR systems overcome limitations in handling blind spots and dynamically changing environments, particularly for autonomous vehicles that require comprehensive 360-degree awareness in real time.
Signal quality improvements address issues of noise, crosstalk, and signal distortion, which are especially problematic in high-speed or high-noise settings. Advanced encoding methods, such as multi-pulse sequences with amplitude and time diversity, reduce interference and enhance noise rejection, while adaptive bias control and channel multiplexing optimize power usage and signal consistency. For long-range applications, innovations in temperature-compensated power supplies and time-to-digital conversion circuits ensure stable signal acquisition, even under varied environmental conditions. Additionally, integrated calibration systems that use natural surfaces as reference points improve accuracy and reduce the need for costly, static calibration setups.
In the area of beam steering, solid-state optical phased arrays and micro-mirror devices have replaced bulky rotating parts, offering precise control with reduced power demands and mechanical wear. This shift addresses the limitations of traditional LiDAR systems, which rely heavily on moving components that are prone to mechanical failure, particularly in harsh or high-vibration environments. Electronically steered beams allow for more versatile scan patterns, enhancing resolution and adaptability in complex terrains or rapidly changing conditions. Similarly, adaptive beam shaping and divergence control enable LiDAR systems to focus on specific objects within the FOV, ensuring efficient energy use and improved accuracy in detecting small or spatially distributed targets, such as bicycles.
Overall, these innovative solutions represent a robust response to the varied challenges faced by LiDAR systems. By addressing specific technical limitations in power efficiency, signal clarity, FOV, size, and cost, these advancements collectively pave the way for more scalable, resilient, and high-performing LiDAR applications. These findings reinforce the alignment between emerging patent activity and industry needs for durability, cost-efficiency, and real-time adaptability.
The thematic clustering in the results reflects distinct R&D priorities, such as power-efficient beam generation and solid-state steering, which directly address commercial deployment constraints in automotive and robotics sectors. The integration of these diverse solutions enhances the practicality of LiDAR technology, facilitating its adoption in a broader range of consumer and commercial autonomous systems while supporting the pursuit of high-resolution, real-time environmental sensing.
5.2. Targeted Future Research Opportunities and Market Alignment
Future LiDAR developments should focus on integrating advancements across multiple domains to address persistent challenges while expanding their applicability. A key direction involves leveraging material science innovations, such as advanced semiconductors and photonics, to enhance beam generation efficiency and reduce production costs. Modular designs that consolidate beam steering, signal processing, and power management into compact, solid-state architectures can further enable scalable manufacturing and deployment in diverse autonomous systems. Additionally, research into adaptive algorithms for dynamic FOV adjustments and real-time signal optimization can improve performance in unpredictable environments, such as urban navigation or adverse weather conditions. Collaborative efforts between academia and industry could drive breakthroughs in miniaturization, eye-safe operation, and energy efficiency, aligning LiDAR capabilities with the demands of consumer and commercial markets.
Future work should prioritize the co-design of LiDAR systems with integrated automotive subsystems, such as headlamps or ADAS modules, to simplify implementation and reduce production complexity. The continued miniaturization of solid-state components will benefit from collaboration between photonics researchers and manufacturers specializing in CMOS-compatible devices.
In parallel, adaptive signal processing techniques identified in recent patents suggest that future research should focus on environment-aware algorithms that dynamically adjust sensing parameters in response to scene context. These solutions can support the next generation of urban mobility platforms, where dynamic lighting, weather, and obstacle density vary widely.
Market trends show increasing investment in modular LiDAR units for aerial and ground-based robotics. Hence, research efforts should also explore scalable architectures that support plug-and-play modularity, reducing time to market for diverse autonomous systems. Collaboration with Tier-1 suppliers could accelerate the translation of such modular designs into mass-produced components.
5.3. Commercialization Considerations and Recommendations
To improve commercial readiness, future work should benchmark leading innovations against industry-specific performance indicators such as cost per channel, mean time between failures (MTBF), and field-of-view-to-size ratio. Additionally, system-level integration studies, particularly for in-vehicle packaging and power optimization, would help translate promising concepts into deployable LiDAR products.
5.4. Limitations
This study focuses exclusively on analyzing patents related to LiDAR technologies, providing insights into commercial innovations and their real-world applications. However, it does not incorporate experimental validation or direct performance benchmarking of the technologies discussed. This omission aligns with this study’s objective of evaluating the innovation landscape rather than conducting empirical testing, which would require specialized setups and access to proprietary designs. Additionally, while the patent review captures a broad range of technical advancements, it does not delve into the economic feasibility or market adoption rates of these innovations, as such analyses fall outside the methodological scope. Future work could address these areas by combining patent data with market analyses and experimental evaluations, offering a more comprehensive perspective on LiDAR’s evolution and its readiness for diverse applications. This expanded scope would enrich understanding while building on the foundation established in this study.
6. Conclusions
This study systematically reviewed recent patents to evaluate advancements in LiDAR technology, focusing on critical challenges such as cost, size, range, and capability. By thematically categorizing innovations into the thematic areas of beam generation, beam steering, field-of-view enhancement, signal quality improvement, and cost/size reduction, the analysis provided a comprehensive and comparative overview of emerging solutions. The findings demonstrate that LiDAR development has made significant progress in addressing traditional barriers, with innovations in solid-state designs, adaptive signal processing, and integrated manufacturing paving the way for more scalable and efficient systems.
The results highlight the importance of multidisciplinary efforts in enhancing LiDAR performance and reliability for autonomous vehicle applications. This study also highlighted the growing role of global collaboration, as evident from the increasing geographic diversity of assignees in the patent landscape. These trends reflect an industry-wide shift toward miniaturization, cost efficiency, and broader functionality, which are critical for the mass adoption of LiDAR in consumer and commercial markets.
Looking ahead, LiDAR innovations are poised to support market expansion beyond automotive applications. Key commercial opportunities include integration into delivery drones, autonomous agricultural machinery, infrastructure inspection systems, and smart city traffic management platforms. These sectors demand compact, high-resolution sensors that can operate reliably in diverse environments, directly aligning with the technical trends identified in this study. Moreover, the emergence of software-defined LiDAR and modular hardware configurations enables easier integration with edge computing systems, facilitating real-time analytics and decision-making in decentralized environments. As a result, LiDAR is increasingly positioned as a core sensing technology in the broader landscape of Industry 4.0 and multi-modal autonomy.
The contributions of this work extend beyond technological assessment by offering actionable insights into the pathways for future LiDAR innovation. By identifying remaining gaps, such as improving environmental adaptability and reducing detection latency, this study provides a foundation for targeted research and development. Moreover, the methodology employed in this patent-based review presents a replicable framework for analyzing technological advancements in other domains. Overall, this study advances current knowledge by bridging the gap between scientific innovation and practical implementation. The insights provided here will support stakeholders in navigating the evolving LiDAR landscape, fostering the development of next-generation autonomous systems while enabling broader applications across industries.
Funding
This research received funding from the United States Department of Transportation, Center for Transformative Infrastructure Preservation and Sustainability (CTIPS), Funding Number 69A3552348308.
Data Availability Statement
This article includes the data presented in this study.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Li, Y.; Zhao, X.; Schwertfeger, S. Detection and Utilization of Reflections in LiDAR Scans Through Plane Optimization and Plane SLAM. Sensors 2024, 24, 4794. [Google Scholar] [CrossRef] [PubMed]
- Tan, Z.; Zhang, X.; Teng, S.; Wang, L.; Gao, F. A Review of Deep Learning-Based LiDAR and Camera Extrinsic Calibration. Sensors 2024, 24, 3878. [Google Scholar] [CrossRef]
- Naich, A.Y.; Carrión, J.R. LiDAR-based Intensity-aware Outdoor 3D Object Detection. Sensors 2024, 24, 2942. [Google Scholar] [CrossRef] [PubMed]
- Peng, H.; Zhao, Z.; Wang, L. A Review of Dynamic Object Filtering in SLAM Based on 3D LiDAR. Sensors 2024, 24, 645. [Google Scholar] [CrossRef] [PubMed]
- Roriz, R.; Silva, H.; Dias, F.; Gomes, T. A Survey on Data Compression Techniques for Automotive LiDAR Point Clouds. Sensors 2024, 24, 3185. [Google Scholar] [CrossRef]
- Qian, X.; Jiang, W.; Deen, M.J. Single Photon Detectors for Automotive LiDAR Applications: State-of-the-Art and Research Challenges. IEEE J. Sel. Top. Quantum Electron. 2023, 30, 1–20. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Hsu, C.P.; Li, B.; Solano-Rivas, B.; Gohil, A.R.; Chan, P.H.; Moore, A.D.; Donzella, V. A Review and Perspective on Optical Phased Array for Automotive LiDAR. IEEE J. Sel. Top. Quantum Electron. 2020, 27, 1–16. [Google Scholar] [CrossRef]
- Atalar, O.; Van Laer, R.; Safavi-Naeini, A.H.; Arbabian, A. Longitudinal Piezoelectric Resonant Photoelastic Modulator for Efficient Intensity Modulation At Megahertz Frequencies. Nat. Commun. 2022, 13, 1526. [Google Scholar] [CrossRef]
- De Silva, V.; Roche, J.; Kondoz, A. Robust Fusion of LiDAR and Wide-angle Camera Data for Autonomous Mobile Robots. Sensors 2018, 18, 2730. [Google Scholar] [CrossRef]
- Bo, L.; Bin, Z.; Yun, J.; Songhua, W.; Guang, W. Special Issue on Innovation and Application of LiDAR. Opto-Electron. Eng. 2024, 51, 240076-1–240076-4. [Google Scholar]
- Rinchi, O.; Ghazzai, H.; Alsharoa, A.; Massoud, Y. Lidar Technology for Human Activity Recognition: Outlooks and Challenges. IEEE Internet Things Mag. 2023, 6, 143–150. [Google Scholar] [CrossRef]
- Yin, H.; Xu, X.; Lu, S.; Chen, X.; Xiong, R.; Shen, S.; Stachniss, C.; Wang, Y. A Survey on Global Lidar Localization: Challenges, Advances and Open Problems. Int. J. Comput. Vis. 2024, 132, 3139–3171. [Google Scholar] [CrossRef]
- Li, W.; Shi, T.; Wang, R.; Yang, J.; Ma, Z.; Zhang, W.; Fu, H.; Guo, P. Advances in LiDAR Hardware Technology: Focus on Elastic LiDAR for Solid Target Scanning. Sensors 2024, 24, 7268. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Nanlal, C.; Liu, Y. Reliable LiDAR-based Ship Detection and Tracking for Autonomous Surface Vehicles in Busy Maritime Environments. Ocean Eng. 2024, 312, 119288. [Google Scholar] [CrossRef]
- Zhao, X.; Xia, H.; Zhou, F. NWSP: A Novel Indicator for Ocean–Land Interface Extraction Using Bathymetric LiDAR. IEEE J. Ocean. Eng. 2024, 49, 1472–1487. [Google Scholar] [CrossRef]
- Boretti, A. Perspective on Single-photon LiDAR Systems. Microw. Opt. Technol. Lett. 2024, 66, e33918. [Google Scholar] [CrossRef]
- Pan, H.; Chen, Z.; Chen, L.; Hong, H. Major Technical Barriers and A High-precision Distance Measurement Method for Frequency Modulated Continuous Wave LiDAR. Opt. Lasers Eng. 2024, 183, 108494. [Google Scholar] [CrossRef]
- Aung, N.H.H.; Sangwongngam, P.; Jintamethasawat, R.; Shah, S.; Wuttisittikulkij, L. Review of LiDAR-based 3D Object Detection Via Deep Learning Approaches Towards Robust Connected and Autonomous Vehicles. IEEE Trans. Intell. Veh. Early Access 2024, 1–23. [Google Scholar] [CrossRef]
- Bu, D.; Jiang, F.; Ku, Y.; Kong, W.; Luo, Y.; Wang, Y. A Priori Map-Based Automated Valet Parking with Accurate Adjustment Ability for Automatic Charging. Int. J. Veh. Des. 2021, 87, 120–145. [Google Scholar] [CrossRef]
- Gong, S.; Shi, C.; Zhang, H.; Lu, H.; Zeng, Z.; Chen, X. RSS-LIWOM: Rotating Solid-state LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping. Remote Sens. 2023, 15, 4040. [Google Scholar] [CrossRef]
- Li, Y.; Zhong, W.; Lu, Y. Calibration of Multi-sensor Fusion for Autonomous Vehicle System. Int. J. Veh. Des. 2023, 91, 248–262. [Google Scholar] [CrossRef]
- Li, Z.; Han, Y.; Wu, L.; Zang, Z.; Dai, M.; Set, S.; Yamashita, S.; Li, Q.; Fu, H. Towards An Ultrafast 3D Imaging Scanning LiDAR System: A Review. Photonics Res. 2024, 12, 1709–1729. [Google Scholar] [CrossRef]
- Thakur, A.; Mishra, S.K. An In-depth Evaluation of Deep Learning-enabled Adaptive Approaches for Detecting Obstacles using Sensor-fused Data in Autonomous Vehicles. Eng. Appl. Artif. Intell. 2024, 133, 108550. [Google Scholar] [CrossRef]
- Zhang, C.; Li, H.; Liang, D. Antireflective Vertical-cavity Surface-emitting Laser for LiDAR. Nat. Commun. 2024, 15, 1105. [Google Scholar] [CrossRef]
- Xu, H.; Yu, W.; Zhang, Q.; Yan, J.; Yuan, H. Hierarchical Fusion Based High Precision SLAM for Solid-state Lidar. Meas. Sci. Technol. 2024, 35, 055102. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, J. Vehicle-mounted Imaging Lidar with Nonuniform Distribution of Instantaneous Field of View. Opt. Laser Technol. 2023, 169, 110063. [Google Scholar] [CrossRef]
- Pipicelli, M.; Gimelli, A.; Sessa, B.; De Nola, F.; Toscano, G.; Di Blasio, G. Architecture and Potential of Connected and Autonomous Vehicles. Vehicles 2024, 6, 275–304. [Google Scholar] [CrossRef]
- Shanmugam, K.; Rana, M.E.; Hong, F.T.Y. Autonomous Intelligent Vehicles: Impact, Current Market, Future Trends, Challenges, and Limitations. In Optimized Computational Intelligence Driven Decision-Making: Theory, Application and Challenges; Tripathy, H.K., Mishra, S., Balamurugan, M.R.S., Mishra, S., Eds.; Scrivener Publishing LLC: Beverly, MA, USA, 2024; pp. 173–194. [Google Scholar]
- Google. Google Patents. Available online: http://patents.google.com (accessed on 22 November 2024).
- WIPO. PATENTSCOPE, World Intellectual Property Organization (WIPO). Available online: https://patentscope.wipo.int/search/en/search.jsf (accessed on 20 November 2024).
- USPTO. Patent Public Search, United States Patent and Trademark Office (USPTO). Available online: https://www.uspto.gov/patents/search/patent-public-search (accessed on 22 November 2024).
- USPTO. Data Download Tables, U.S. Patent and Trademark Office (USPTO). Available online: https://patentsview.org/download/brf_sum_text (accessed on 2 October 2024).
- Yigitcanlar, T.; Senadheera, S.; Marasinghe, R.; Bibri, S.E.; Sanchez, T.; Cugurullo, F.; Sieber, R. Intelligence and the Local Government: A Five-Decade Scientometric Analysis on the Evolution, State-of-the-Art, and Emerging Trends. Cities 2024, 152, 105151. [Google Scholar] [CrossRef]
- Eck, N.J.V.; Waltman, L.V. Leiden University. Available online: https://www.vosviewer.com/ (accessed on 30 June 2024).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).