1. Introduction
VANETs are wireless networks with roadside environments consisting of vehicles, cars, buses, and trucks. The storage device fixed on the vehicles in VANETs is the on-board unit (OBU) that is used to receive or transmit data, and the network is monitored by the roadside unit (RSU) [
1]. Communication is performed using short-range communication (DSRC) which helps communication between various vehicles that are random in nature. The RSU collects all types of information from the vehicles, such as traffic jams and warning messages etc. [
2]. It is essential to use high-quality and successful routing protocols to enhance performance [
3,
4,
5]. An Ad-Hoc network is a mobile node in wireless networks with well-established structure. VANETs are the new generation technique to enhance the intelligent transportation system by achieving effective communication among vehicles. Here vehicles are equipped with devices to transfer information, as well as to send or collect relevant data on movements in similar paths. To perform multi-hop data transmission, the methods used are topology-based approaches and position-based approaches. Recently, both these approaches have been used for traffic management in the network. Additionally, clustering is significantly used to meet the demands of QoS (Quality of service) in VANETs, such as low latency, high speed, and delay-tolerant services with high bandwidth and low power consumption [
6].
The suitable traditional routing protocols for VANETs are Ad-Hoc on-demand distance vector (AODV), dynamic source routing (DSR), destination-sequenced distance-vector (DSDV), etc. From earlier research, it has been proven that AODV is the best among the traditional routing protocols for effective path establishment to transfer data. In VANETs, communication links are intermittently disconnected, due to the huge mobility of vehicles, so, traditional routing protocols become ineffective for VANETs [
7,
8]. Recent research has included geographic location-based routing, map-based routing, location, route-based routing, and topography-based routing. In VANETs, high mobility in vehicles results in dynamic changes in the topology, reflected in rapid changes in channels and frequent handovers. For these reasons, analyzing and predicting vehicle trajectory are essential [
9].
In VANETs, the vehicles move freely from the source to the destination in a random manner with rapidly changing topology. The vehicles within the coverage area can exchange information directly. The vehicles outside the coverage area should transmit the data indirectly by adapting the multi-hop routing protocol. The dynamically varying network of each vehicle is accountable for the process of route discovery. By using clustering in VANETs, efficiency of routing can be increased. Clustering is defined as a technique of rearranging all the vehicles into small clusters, according to the area vicinity and the cluster head (CH). The CH is accountable for cluster management and other activities inside the clusters, such as routing table update, and route discovery. Vehicles other than CH are declared ordinary vehicles. The ordinary vehicles transmit packets to the CH. If the destination is inside the same cluster, then the CH would transfer the data to the destination, otherwise the data is transmitted to the RSUs. Thus, CH and RSUs participate in the process of control packets. In order to achieve better performance, VANETs routing overhead and power consumption have to be significantly reduced to protect the network from scalability issues in dense areas [
10].
Contribution of the Research
The contribution of the research is to improve the traffic management of dynamically varying VANET topology and also to reduce energy consumption and communication overhead.
In the cluster-based VANETs, in a maximum of the cases energy loss happens during the time a vehicle leaves a cluster and joins a new cluster. This process increases the congestion in the network, and this is reflected in an increase of communication overhead.
For this reason, a Traffic Management Unit (TMU), that helps to monitor the congestion, and a clustering model, which works to reduce the consumption of energy during the process of leaving and joining clusters is proposed in the Traffic-Aware Clustering-based Routing Protocol (TACRP).
Due to the accountable traffic management system, the delay and routing overhead in the network can be greatly reduced, which leads to improved network throughput and packet delivery ratio.
By using the concept of stable clusters, energy consumption is reduced, which leads to improved energy efficiency of the network. Likewise, the proposed method helps to improve the overall performance of the dynamically varying VANET network.
The organization of the paper is as follows. In
Section 2, the earlier related works of traffic and cluster-based VANET networks, and their merits and demerits, are discussed. In
Section 3, the AODV routing protocol is elaborated on. In
Section 4, the proposed Traffic-Aware Clustering-based Routing Protocol (TACRP) is discussed. In
Section 5, the performance evaluation and results are discussed. In
Section 6, the conclusion is given, with the future direction of the research.
2. Related Works
In Ref. [
11] a new approach was presented to address the drawbacks in VANETs, such as lack of energy efficiency, delays, security issues, and bandwidth problems. So as so to improve the performance of these parameters, optimal RSU placement was proposed, centered on the Memetic-based RSU (M-RSU) placement algorithm. With the help of this algorithm network communication delay was reduced and communication delay increased which led to improvement in the efficiency of the VANETs. Additionally, a Distributed ML (DML)-based Intrusion Detection System (IDS) was used to improve the overall performance of the network. However, the network produced moderate throughput.
In Ref. [
12] a novel approach to improve the packet delivery ratio (PDR) and reduce the delay of VANETs was presented, which used Efficient Clustering V2V Routing Based on Particle Swarm Optimization (PSO). The results packet delivery ratio (PDR) improved by 20% and the delay was reduced by up to 47%. The network, however, failed to achieve high throughput and efficiency.
In Ref. [
13] a design to improve efficiency and flexibility, called Novel Routing and Hybrid based Clustering Scheme (NRHCS) for VANETs, was introduced, based on cluster formation and cluster head election re-clustering. In the end, it achieved high efficiency, but, due to various activities, the overhead and delay were high.
In Ref. [
14] a promising technique was developed, that was based on a clustering approach, to improve the performance of vehicular communication, called the Efficient Cluster Head Selection (ECHS) scheme. This method produced a high lifetime, low packet loss and delay, and low overheads. However, it failed to achieve high throughput, which meant it was not suitable for huge dynamically-varying networks.
In Ref. [
15], to improve the overall performance of VANETs, an efficient communication pattern for VANETs was suggested, which was based on a Moth-Flame Optimization (MFO) scheme-based clustering approach called AMONET. Here bio-inspired algorithms were used for the process of optimized cluster head selection, which made the system more reliable and efficient in communication. The overall performance achieved by the network was good. However, it might create more overhead when applied to a network with a huge number of dynamic vehicles.
In Ref. [
16] a cluster-based model was proposed to improve the efficiency, scalability and lifetime of VANETs, called a fuzzy logic-based clustering control scheme. It is a context-aware scheme with multi-criteria decision making, mainly fuzzy, used for the rank calculation of multi-attribute candidates to select the CH in the optimal way. This method reduced the energy consumption in the network which led to improving the network efficiency and lifetime. However, the method increased the routing overhead which led to an increase in delay in communication.
In Ref. [
17] a clustering-based Vehicular Ad-hoc Network (VANET), in which a dual-slot transmission scheme for intra-cluster interference suppression with a graph-based algorithm was proposed. In general, this method produced moderate results with respect to delay and energy. On the other hand, the packet delivery ratio achieved by this approach was low.
In Ref. [
18] a Multi-channel Clustering-based Congestion Control algorithm to reduce congestion in the network was proposed. It is an infrastructure-independent clustering method to mitigate network congestion. Here, the overall performance improved by reducing the power consumption where control information overhead was reduced. However, this method failed to achieve high throughput and delivery ratio.
In Ref. [
19] a method to reduce delay, called Traffic Differentiated Clustering Routing (TDCR) mechanism, was introduced. The core idea of this method is a centralized one-hop clustering approach with a data delivery optimization method. From the simulation evaluation the proposed work achieved low delay and overhead. However, the throughput and bandwidth utility was poor.
In Ref. [
20] a CNN-based clustered routing protocol, mainly used to reduce delay and communication costs, and to improve network interoperability, was presented. For hybrid communication-based network transmission the concept mainly focused on inter-cluster transmissions. The parameters which produced better performance using this concept were delay, data delivery ratio and traffic. The major drawback was that it failed to reduce the overhead produced during the process of communication that led to more energy consumption.
In Ref. [
21] the issues created during continuous transmission were addressed. An efficient cluster-based resource management was proposed to improve the performance of VANETs in terms of packet received ratio and throughput. This method achieved high throughput, and packet received ratio, but it also produced high overhead.
In Ref. [
22] an approach to reduce the broadcast overhead, called a clustering technique for Reduced Broadcast Overhead Scheme for Emergency Message Dissemination, was presented. This method improved the performance of the network in terms of end-to-end delay and message reliability. However, it failed to achieve high throughput.
In Ref. [
23], the author Pablo characterized the connectivity–throughput tradeoff faced by clusters of vehicles and proposed a cluster-based multi-homing model that offered high performance to improve the overall performance of VANETs. However, this system achieved only moderate results.
In Ref. [
24], a method to improve the packet delivery ratio and to reduce the end-to-end delay, called adaptive jumping multi-objective firefly algorithm and integrated cluster based forwarding mechanism, was introduced. With the help of clustering and multi-objective optimizations this work achieved high overall performance but, on the other hand, it produced high overhead.
In Refs. [
25,
26], a new MAC/NET with Updated Genetic Algorithm, was introduced. This used a Cross Layer Approach (MNUG-CLA), which was a combination of MAC layer and network layer, designed to improve the efficiency of VANETs. Here a new neighbor discovery protocol, multi-channel MAC model and an updated GA algorithm were used. This model provided better results, in terms of energy efficiency and successive packet transmission, but it failed to achieve high throughput with reduced overhead.
Table 1 is a summary of closely related works.
The baseline methods which are used in the comparison of the proposed TACRP routing protocol are Novel Routing and Hybrid based Clustering Scheme (NRHCS) [
13] and Efficient Cluster Head Selection (ECHS) [
14]. In the case of NRHCS, CH selection and effective re-clustering are done at the initial stage of cluster formation. Through this method, the energy consumption of the network is reduced. The algorithm is designed to support both highway and urban scenarios. This method produces high throughput, low congestion, and high coverage area, but, due to the dense population, this method generates more control overhead that directly reduces the packet delivery ratio of the network. So, it is essential in the design that both congestion and overhead be concentrated and reduced. Next, the ECHS method, in which clustering is performed in both a centralized and distributed manner and perfect distribution of clusters is guaranteed. An effective gateway model is presented with cluster formation based on speed limits. Through this method, the system achieves low loss, overhead, and delay. However, the efficiency is moderate and when the system is applied to high speed the efficiency is simultaneously reduced. So, it is essential to design a prototype which concentrates on reducing both the overhead and consumption of power.
3. AODV Routing Protocol for VANETs
In general, VANETs are networks with huge mobility. Due to the characteristics of VANETs various issues are created, such as routing, congestion, quality of service, and movement in vehicle nodes. In order to achieve an efficient path during the process of communication between the sender to receiver routing, protocols are introduced which are classified into reactive, proactive and hybrid routing protocols [
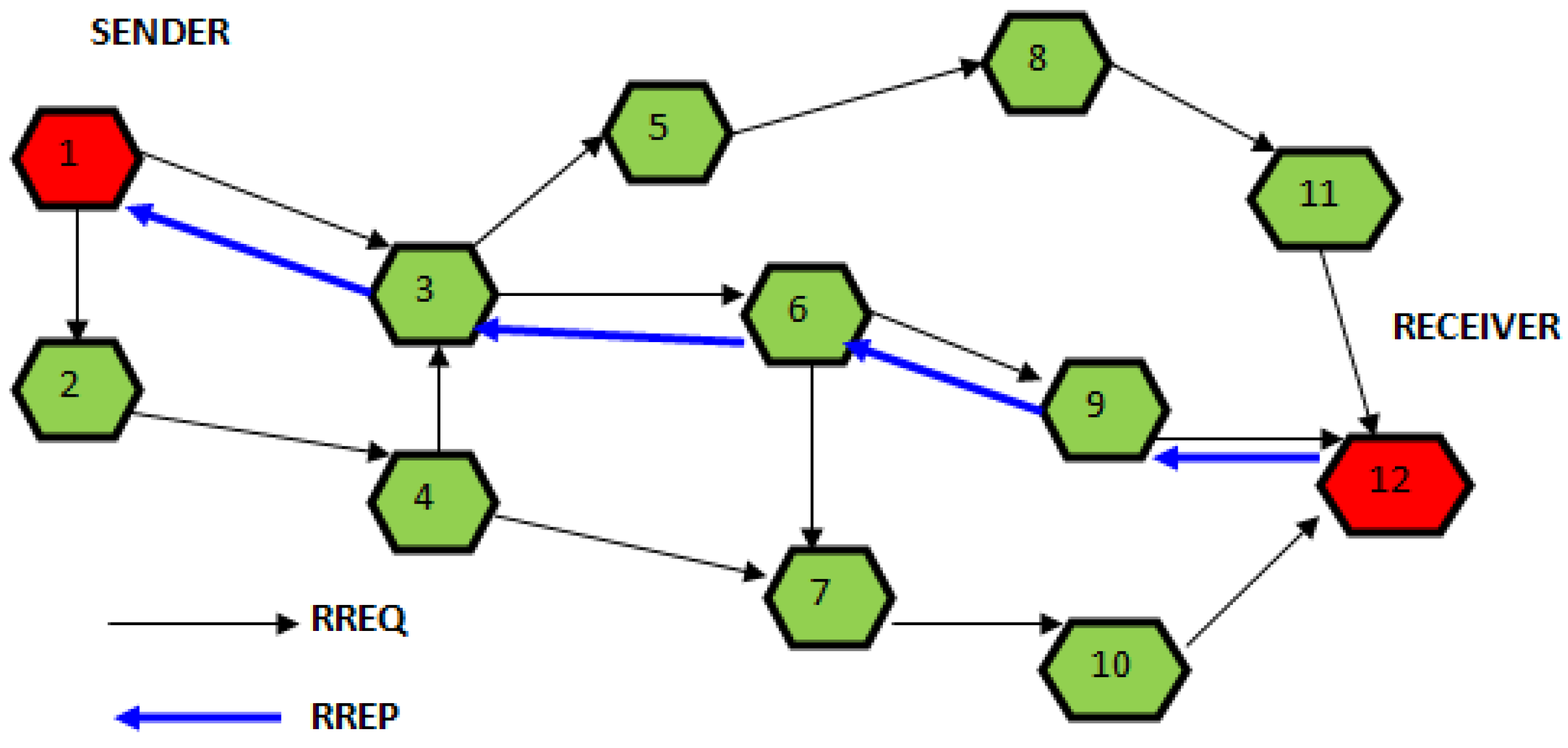
27]. AODV is one of the reactive types, and stands for Ad-Hoc On-Demand Distance Vector. The features of this protocol are that it can provide unicast, multicast, and broadcast communications. To perform the action of route discovery, a route request (RREQ) message is transmitted from the sender, then, after the receiver receives the RREQ message the receiver transmits a route reply (RREP) message. The other messages are route error message (RERR) and hello message (HELLO) for route maintenance [
28].
From
Figure 1, it can be seen that the sender previously transmitted the RREQ message before transmitting the actual message. Any neighbor hop which is in the path towards the receiver responds with the RREP message and then rebroadcasts the RREQ to the next hop to reach the receiver. Once the RREQ is received by the destination it replies by transmitting the RREP to the sender. Only after receiving the RREP from the receiver, does the sender node initiate the data transmission. In case link failure occurs at that time, the corresponding node reports the RERR message to the sender and repeats the route discovery process [
29]. The best path is selected by the sender using the hop count and sequence number, which has to be the shortest and most reliable. AODV initiates the route establishment only at the time the sender wants to transfer the data packets. During the process of data transmission, the sender transmits the RREQ for connection. The hop nodes store and then transmit the RREQ towards the receiver. All the entries which are used for the process are erased after some time. In case route failures occur, the RERR message is transmitted to the sender node to recreate a new path to the receiver.
4. Traffic-Aware Clustering-Based Routing Protocol (TACRP)
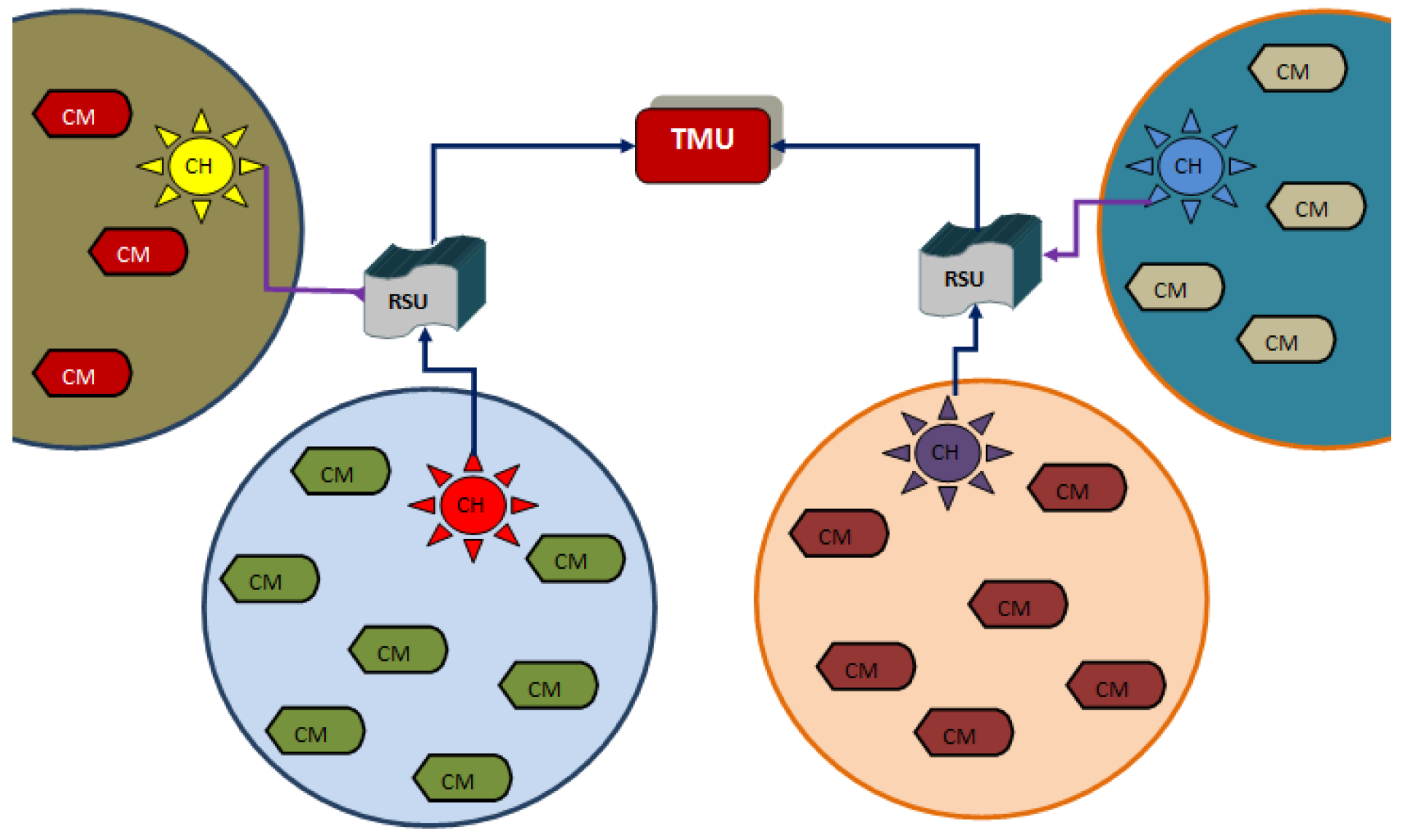
The TACRP protocol was mainly developed to improve traffic management in VANETs. The systematic framework is shown in
Figure 2. It mainly includes the Cluster Head (CH), Cluster Members (CMs), Road Side Units (RSUs) and Traffic Management Unit (TMU). The complete process of the TACRP protocol is elaborated below.
4.1. Road Side Unit (RSU)
The RSU is located to ensure high-quality communication among the vehicles in highly congested areas of the network. RSUs are interconnected to vehicles by wireless links and equipped with sensors for communication. The RSU collects the location information and traffic network pattern of the vehicles and shares the details with the TMU. Here, the vehicles are grouped into clusters that are controlled by a CH, that performs the process of data aggregation, intra-cluster communication with the CMs, and inter-cluster communication with other CHs or RSUs [
20].
4.2. Traffic Management Unit
The Traffic Management Unit (TMU) takes control of the whole network, mainly providing route plans. It collects certain information, for instance, present position of vehicles and their target place, as well as the vehicle density at various routes. According to the vehicle information, a certain number of vehicles in a particular location are grouped into clusters. Vehicle selection for each cluster is based on priority, where the highest priority is given to emergency vehicles, then to passenger and goods vehicles. Each cluster is managed by its cluster head (CH). A group of clusters at a particular location is monitored by the RSU. The TMU is the controlling authority, which gathers the vehicles information from the RSU and then process the data [
30]. The TMU collects the information from the RSU about the vehicles and the vehicular information and then processes it. By using the information, the vehicles are ranked. Vehicles are clustered according to area. The following data are collected from the vehicles by the CH for the process of clustering: vehicle type, as per priority, traveling speed of the vehicle, ranging from 0 to 90 Km/h, and residual energy of the vehicle and its address. The vehicles are grouped according to the destination point. Vehicles having the same destination location occupy the highest priority.
The path selection process from source to destination is maintained by the TMU which conducts an analysis of the vehicle density of all the roads. Once the process of clustering path selection has started, paths are chosen based on priority, less congestion, optimal and less dense roads to the destination. In most cases, vehicles with the same priority select the same path to reach the destination during the process of communication.
4.3. Cluster Head (CH) Selection
Clusters are structured according to the vehicle’s location, direction, speed, priority, and energy. Each cluster embraces one special quality of the CH selection. The CH intends to maintain the interest of the vehicles in the respective cluster. If the CH receives any message, it checks the willingness of the vehicle to receive the message. If the vehicle is not willing to receive the message, then it is transmitted to the RSU. To enhance the process of CH selection, weight-based clustering is initiated, and, thereby, every vehicle measures its weight. The vehicle with maximum weight has the highest priority to become a CH. The sequential process for the selection of CH is given below. The final parameters which are elected for the process of CH selection are distance, residual energy, and threshold energy. The mathematical expression for the selection of CH according to the weights is shown below:
where,
is the weighting factor for the clustering process which satisfies the condition,
,
is the distance between vehicles A to B,
is the residual energy of vehicle A and
is the threshold energy of the vehicles A and B.
Distance Calculation: The average distance between vehicles A and B is computed based on the mathematical expression shown below [
31]:
where
represents the relative position of vehicles A and B,
n represents the average vehicle in the path and
N represents the neighbor count at each time instance.
Residual Energy Calculation: The residual energy of the vehicle is measured according to the distance, which is based on the position of the vehicle and speed. The mathematical expression is shown below:
where, the residual energy vehicle A is calculated and
is represented as the directional edge of the segment.
Threshold Energy Calculation: The mathematical expression for the calculation of threshold energy is given below:
where,
indicate the calculation of energy consumption during the process of transmission and data aggregation,
indicates the active vehicle in the path and
represents the optimum number of clusters and is expressed as below:
where,
indicates the parameter used to illustrate the energy consumption in multi path network,
indicates the coverage area of the sensing region and
indicates the average distance among vehicles A and B. These are all the major parameters that which are considered for the selection of CH.
4.4. Vehicle Leaving the Cluster
VANET is a network with a dynamically moving topology. It means that vehicles in clusters get periodical replacement according to vehicle mobility. If the vehicle CM wants to leave the present cluster it has to send a request message to the neighbor CH. After getting the approval the leaving CM gets disconnected and then joins the new cluster [
20]. The CH needs to find a replacement as soon as possible. Then the routing table gets updated according to the degree of connectivity. Consequently, the CM with maximum connectivity is chosen as the next CH member. Then the CH rebuilds the cluster to achieve the maximum number of CMs in a decentralized manner. So, the CM which leaves a cluster transmits the leaving message to the corresponding CH and the other CM vehicles in the cluster and then the routing table gets updated. The leaving CM resets its CH’s ID to null to communicate with the new CH.
4.5. Vehicle Joining the New Cluster
The New cluster head transmits the request message to the available CM at that time. At the same time, CM also transmit the request message to join a new cluster if necessary. So, automatically the new CH approves the request to fill the space. At the same time, the CM of the past cluster empties its CH ID. The new ID is also given to the CM which is ready to join the new cluster. Then the CH updates its routing table and transmits the data.
4.6. Updating the CH
During the process of updating CH, each CM vehicle measures and transmits its weight value to the corresponding CH. If any of the CM nodes maintain a weight value which is higher than the present CH then, automatically, the CM with the maximum weight value is chosen as the new CH. The calculation of cluster updating weight value is measured using parameters such as buffer size of the CM, speed, and node degree [
32]. The mathematical expression for the calculation of this weight value is shown below:
where,
indicates the vehicle buffer in free space value,
indicates the vehicle buffer initial value, D and
are the distance of the vehicles and maximum distance the cluster can cover,
indicates the vehicle neighbor node and maximum vehicles present in the coverage area,
are the weight factors where
. The mathematical expression used for the calculation of
is shown below:
where,
indicates the vehicle transmission range,
indicates the vehicle length and
indicates the number of lanes.
4.7. Inter-CH Communication
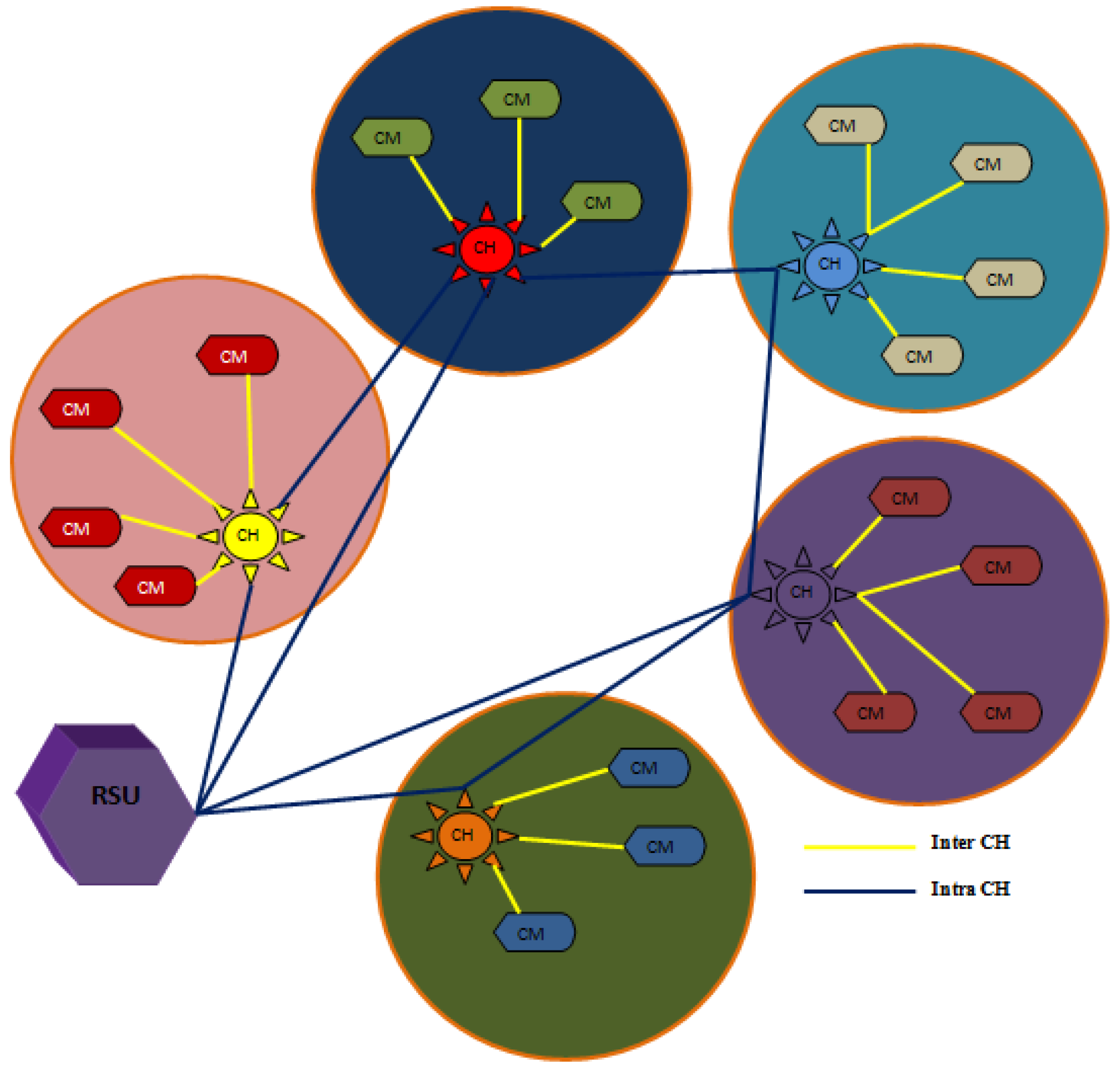
The idea of LEACH protocol is used for the process of inter-cluster communication and is recreated according to the network model [
33]. At the initial stage, CH is an election and then clusters are created. The CH collects the data from the CM vehicles and then transmits it to other CHs and to the RSUs according to availability. The inter-CH communication is described in
Figure 3. In order to reduce the network overhead, the CH merges similar information by consolidating several data into one. The process of inter-CH communication is sequentially explained below.
The TMU initiates the new rounds in a periodical manner, for each round it gets increments of the round number. The CH is chosen according to the above-mentioned calculations. The CH used in the network is 0 to 1 in numbers. After the election of the CH, it transmits the request message to the vehicles in its coverage area. The CH present in the coverage area of the vehicles receives the reply message from the vehicles. After receiving the confirmation from the CH the vehicles become cluster members CMs. CM vehicles forward sensed data to respective CHs. Then the CHs aggregate the collected information from the CMs. Finally, the data are transmitted to the RSUs/CHs. The RSUs, in turn, forward the data to the TMUs. The same process is repeated in all the rounds until the end of the communication.
5. Performance Evaluation
The results calculated by the TACRP-based traffic management are described in this section. To analyze the betterment of the TACRP routing protocol the results are compared with earlier works, such as the Efficient Cluster Head Selection (ECHS) scheme [
14] and Novel Routing and Hybrid based Clustering Scheme (NRHCS) [
13]. The TACRP routing protocol is examined based on performance using four parameters, such as energy efficiency, network throughput, end-to-end delay, packet delivery ratio, packet loss, and overhead. The mathematical expressions for the calculation of these parameters are shown below.
The packet delivery ratio is defined as the ratio of the quantity of packets received by the destination to the total amount of sent packets from the source.
Throughput is defined as the ratio of the number of received messages from the destination at each instant of time.
End to end delay is defined as the delay time that is produced during the process of communication among the vehicles for the entire transmission.
Packet loss ratio is defined as the amount of packets lost during the process of data transmission between the source and the destination.
Communication overhead is the summation of overall forwarded messages in terms of transmission rate, direct broadcast, indirect broadcast, and shared messages:
Energy efficiency is termed the residual energy of the network and is the calculation of the remaining energy at the end of the data transmission between the vehicles for the entire network:
5.1. Experimental Setup
The simulation of the proposed TACRP routing protocol was done in the NS2 simulator as well as the PC, where certain configurations were included, such as 4 GB RAM, (Fiat Chrysler Automobiles in Stellantis), Windows 10 OS (from Microsoft) in Redmond Washington, and the Intel I3 processor (Samsung in Suwon-si, south Korea). Network Simulation 2 (NS2) was based on two languages as frond end language OTCL (Object Tool Command Language), back and C++. To check the animator view of the constructed network, a NAM (Network Animator) window was used. With the help of the trace file, the outcome of the network was measured. The simulation input parameters are described in
Table 2.
5.2. Evaluation Scenario
For the process of performance analysis, two scenarios were taken. Firstly, parameters such as energy efficiency, throughput, packet delivery ratio, end-to-end delay, packet loss, and network overhead were calculated with varying numbers of vehicles with a vehicle coverage area of 200 m and with a static speed of 50 Km/h. The values were calculated and the performance analyzed. Secondly, parameters such as cluster head efficiency, cluster member efficiency, and average cluster number were calculated with varying vehicle speeds, with a static number of vehicles and with a vehicle coverage area of 200 m. The values were calculated and the results compared with the ECHS and NRHCS protocols.
5.3. Network Performance Based on a Number of Vehicles
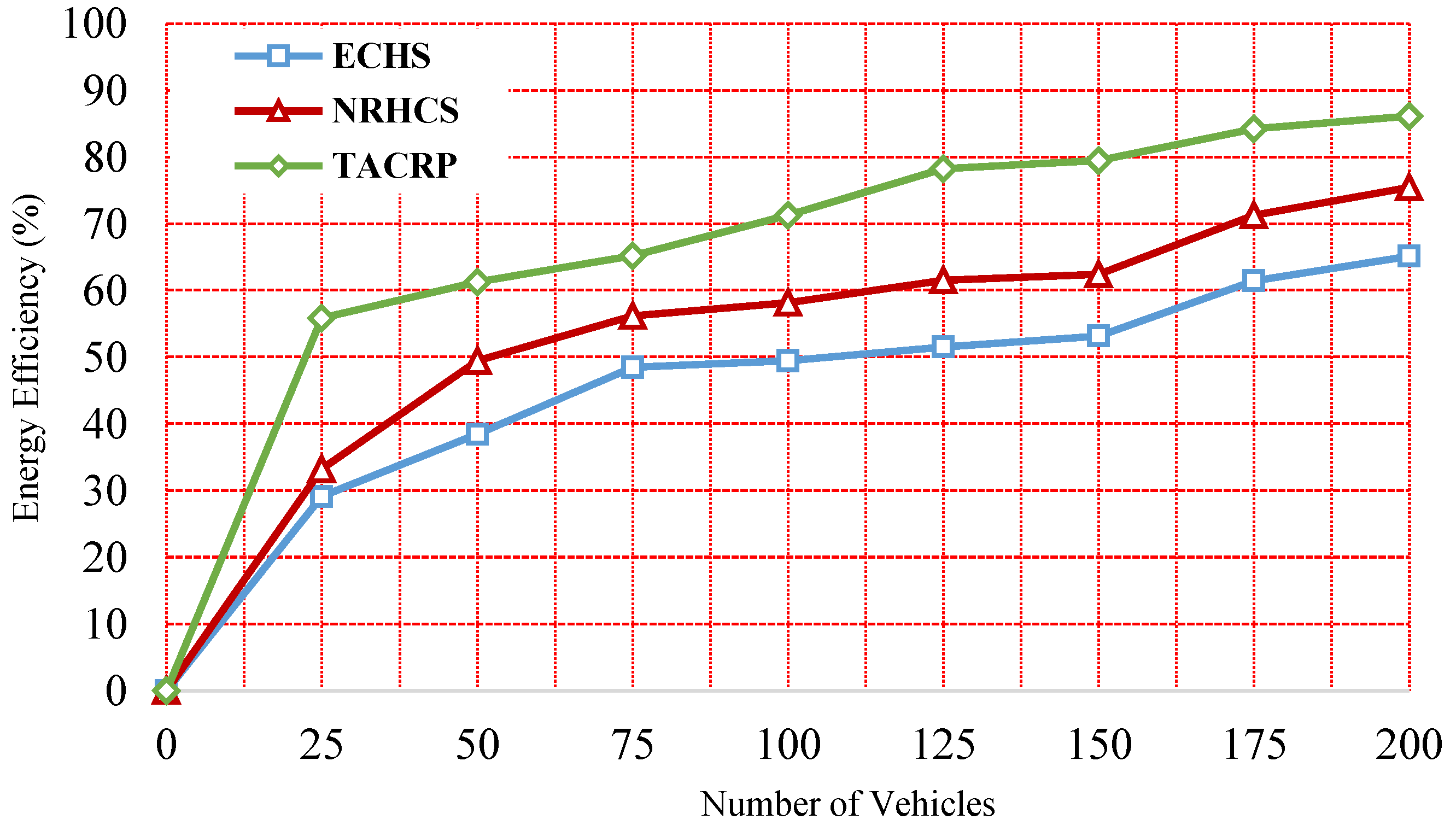
Figure 4 shows the energy efficiency when the numbers of vehicles were varied and where the coverage area of the vehicles was 200 m with a speed of 50 Km/h. The proposed TACRP protocol achieved the expected results because the energy efficiency achieved was more than 85%, which was very complicated in the huge mobility-based dynamically varying network. The energy efficiency of the earlier works, such as ECHS and NRHCS, were 65.13% and 75.46%, respectively, whereas the proposed TACRP protocol achieved up to 86.14%. This was achieved with the help of the traffic-aware clustering model. In the traffic-aware clustering model, clustering is done in an effective manner. In earlier research, energy is consumed during the process of vehicles leaving the cluster and joining into a new cluster, and, hence, it is dynamic in nature and change of cluster happens frequently. That is the reason the energy consumption was high in the earlier works, which was reflected in reduction of efficiency. The efficiency achieved by the ECHS was nearly 65% and by the NRHCS nearly 75%. In the proposed TACRP protocol, vehicle traffic is properly managed. Vehicles leaving the cluster and then joining other clusters are processed in a systematic way, which leads to reduction in energy consumption and is reflected in an increase of energy efficiency. So, the energy efficiency achieved by the proposed TACRP protocol reached up to 86%.
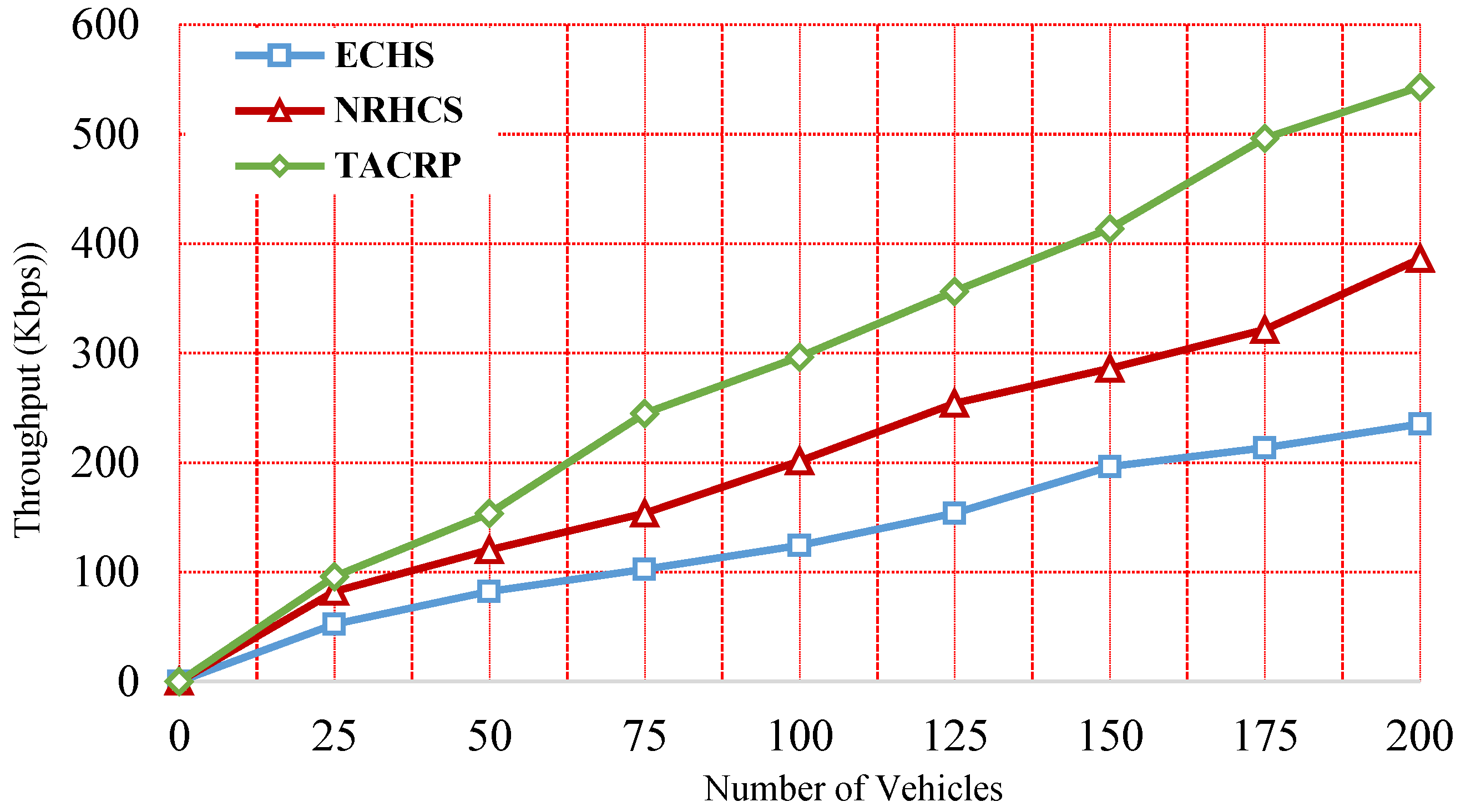
Figure 5 shows the throughput calculation with a varying number of vehicles where the coverage area of the vehicles was 200 m with a speed of 50 Km/h. The network throughput achieved by the proposed TACRP protocol was 543.16 Kbps, whereas the earlier ECHS and NRHCS were 235.14 Kbps and 386.14 Kbps, respectively. The proposed TACRP protocol produced a throughput which was around 150 to 200 Kbps more than the earlier works. This performance was achieved because of the usage of traffic management in the proposed work. The routing overhead was greatly reduced during the process of communication in the proposed model. As the results showed, it enabled the achievement of high throughput at the end of the simulation.
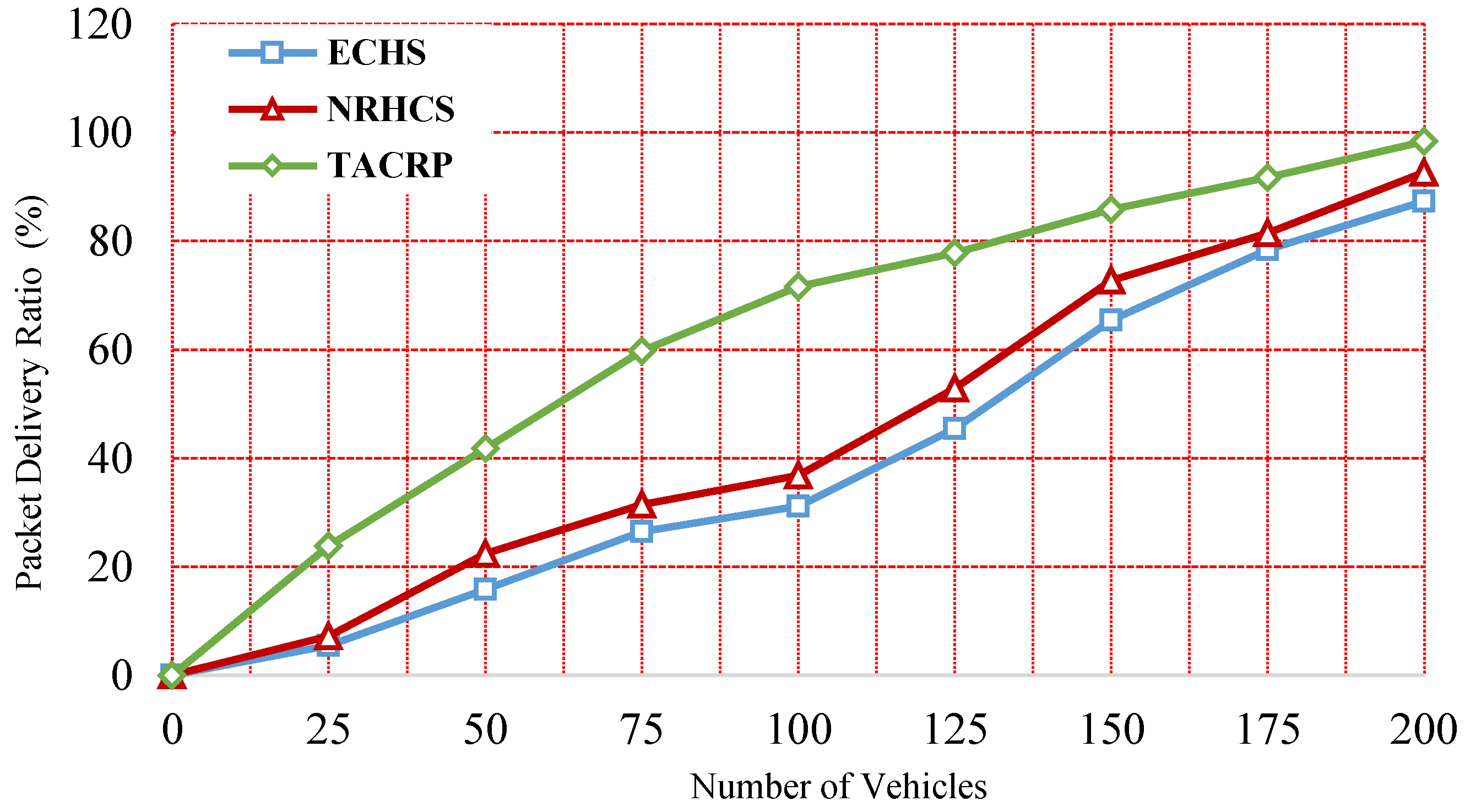
Figure 6 shows the packet delivery ratio calculation with a varying number of vehicles where the coverage area of the vehicle was 200 m with a speed 50 Km/h. The proposed routing protocol achieved a maximum packet delivery ratio of 98.37% because of concentrating on the traffic and energy modules. As a result, network overhead and delay were greatly reduced. The ECHS and NRHCS produced up to 87.35% and 92.67%, respectively. Due to the proper traffic management system in the proposed TACRP protocol, the congestion in the network was greatly reduced so that the packet loss reduced, which was reflected in in the improvement of the packet delivery ratio in the proposed TACRP protocol. For that reason, the packet delivery ratio of the proposed work reached nearly 98%.
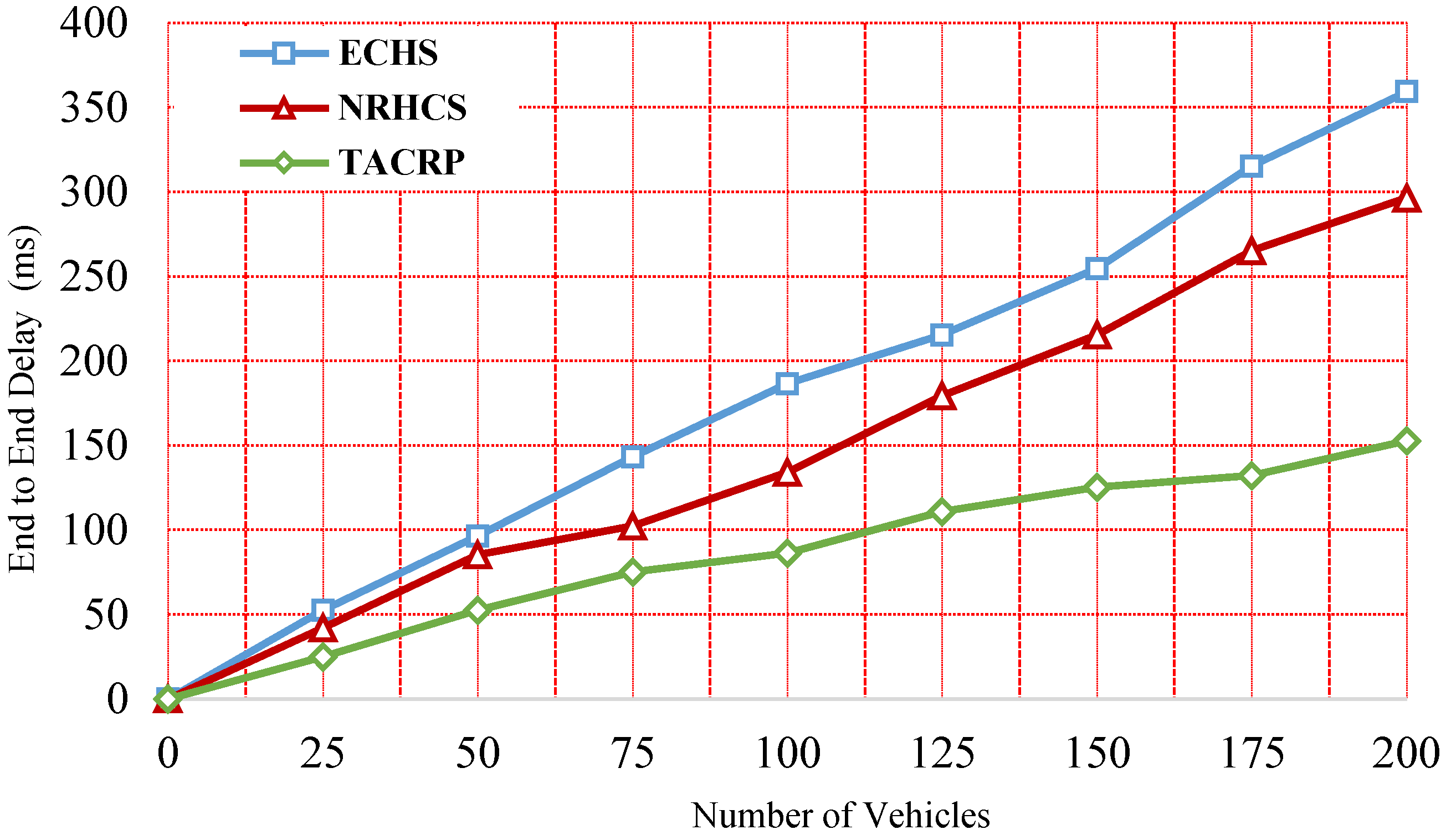
Figure 7 shows the end-to-end delay calculation of the network with a varying number of vehicles where the coverage area of the vehicle was 200 m with a speed 50 Km/h. The end-to-end delay achieved by the proposed TACRP protocol was 152.71 ms, whereas for ECHS and NRHCS it was 359.14 ms and 296.47 ms, respectively. The major concentration of the proposed TACRP protocol was traffic management in the highly dynamic VANETs. The traffic-aware clustering-based routing protocol monitored traffic and properly controlled the traffic, which led to reduction of the end-to-end delay in the proposed TACRP protocol. As a result, the proposed protocol caused a drop in delay to around 200 ms to 150 ms lower than the earlier comparisons.
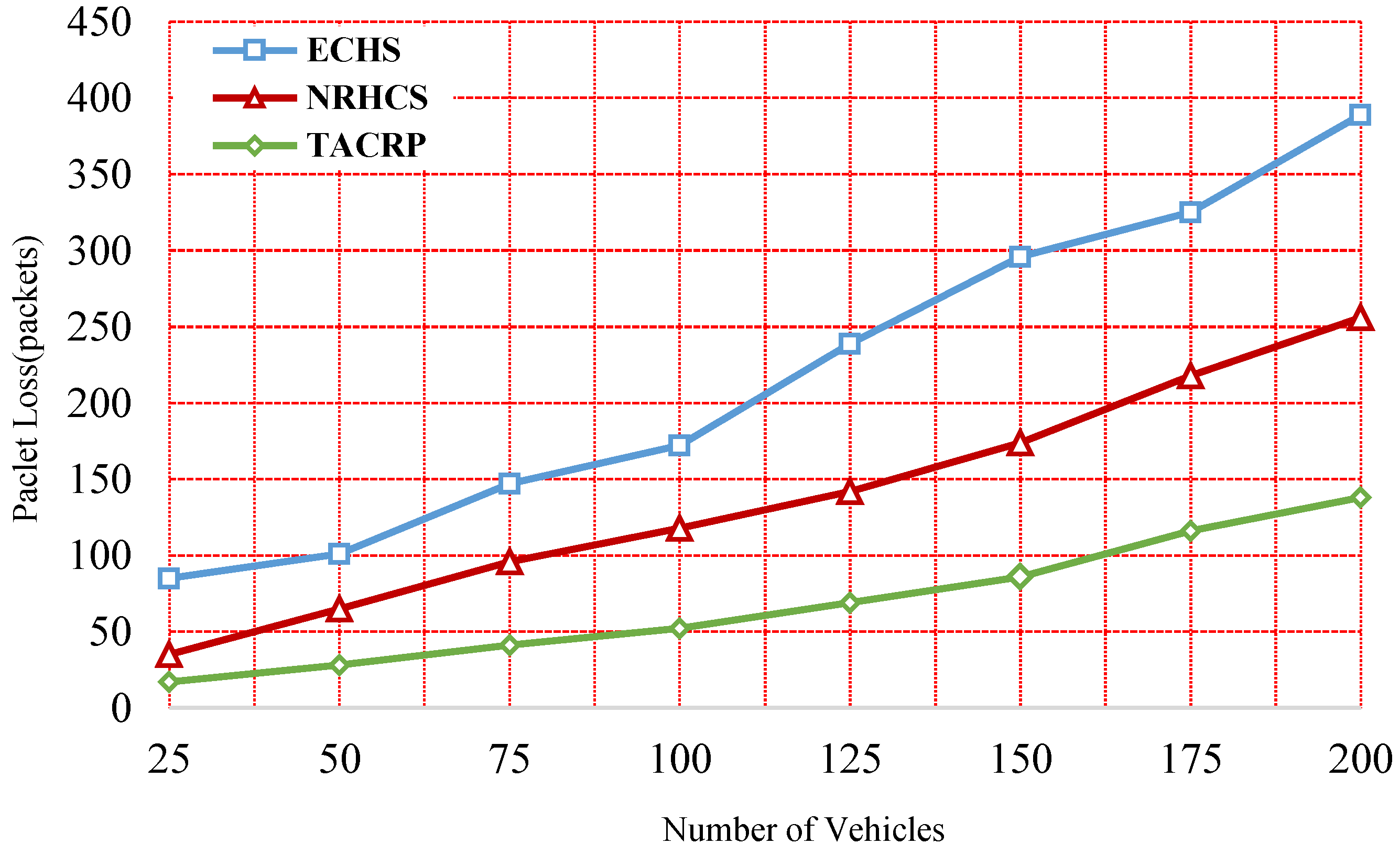
Figure 8 demonstrates the calculation of the packet loss with a varying number of vehicles where the coverage area of the network was 200 m with a speed 50 Km/h. The packet loss of the proposed TACRP protocol was only 138 packets for the entire transmission while ECHS and NRHCS protocols produced up to 389 packets and 256 packets, respectively. Due to the traffic management in the proposed TACRP protocol congestion was highly concentrated and controlled. During the process of communication on behalf of low congestion, packets were transmitted from the source to the destination in an elegant way so that the packet loss was very low.
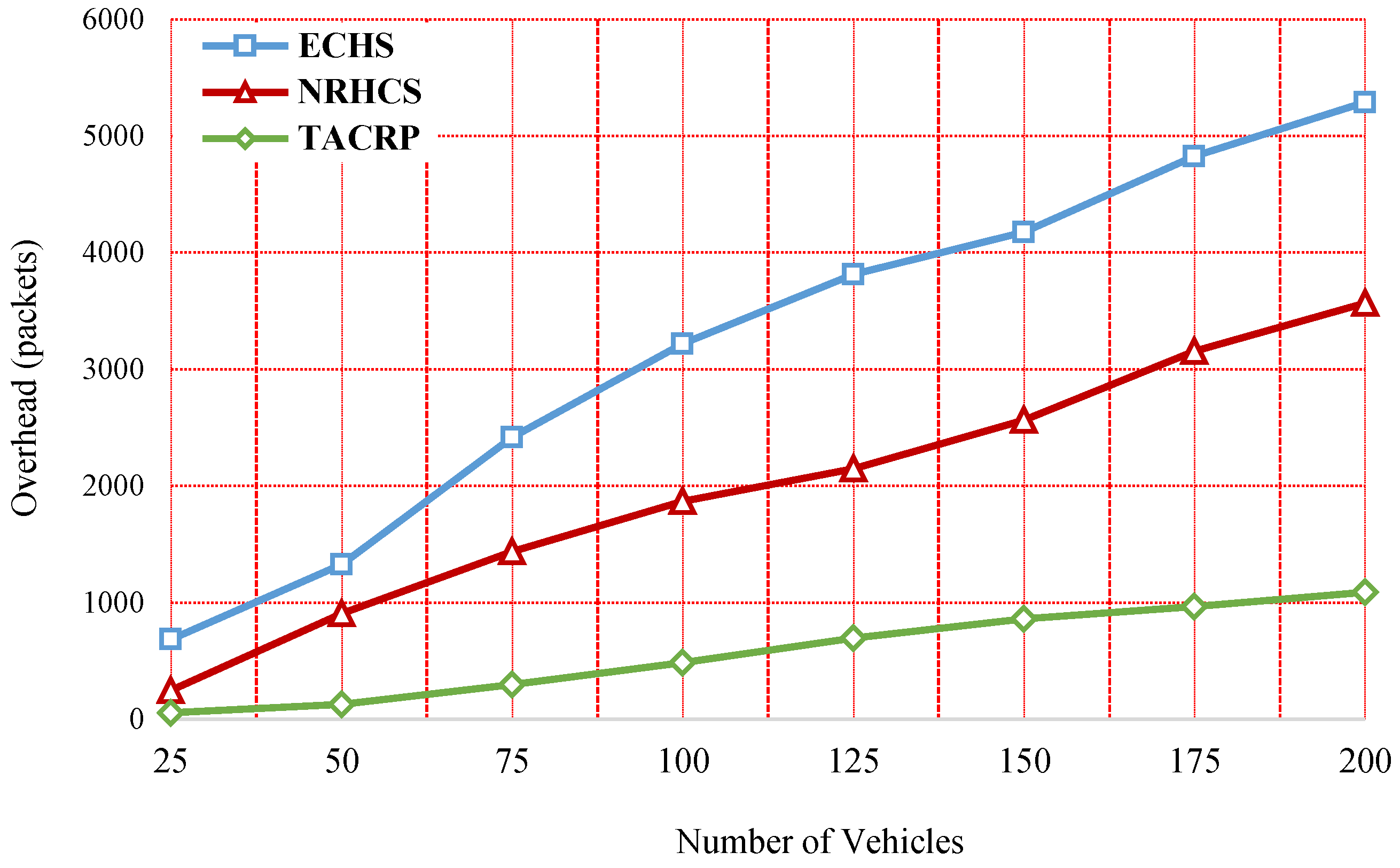
Figure 9 demonstrates the calculation of the network overhead with varying number of vehicles where the coverage area of the network was 200 m with speed 50 Km/h. The overhead of the proposed TACRP protocol was 1089 packets for the entire transmission, while the ECHS and NRHCS protocols produced up to 5289 packets and 3567 packets, respectively. High congestion was the major reason for the generation of the overhead in the network. In the proposed TACRP protocol congestion was reduced, reflected in the reduction of the overhead in the network.
Results Discussion Based on a Number of Vehicles
The overall performance detail of the network is given in
Table 3 and
Table 4. From the results, it is understood that the proposed TACRP routing protocol outperformed the earlier works, such as the ECHS and NRHCS protocols. These results were achieved due to the introduction of a traffic management unit in the VANETs. It monitored the entire traffic of the network even if it contained huge traffic. Additionally, the clustering technique was used and it included the principle of a vehicle leaving the cluster, a vehicle joining the cluster, cluster updates, and inter-cluster communication. Due to the introduction of these techniques, traffic management was greatly enhanced, reflected in the performance analysis. The parameters that were concentrated in the performance analysis were the calculations of energy efficiency, network throughput, packet delivery ratio and end-to-end delay of the network.
The proposed method mainly concentrated on network traffic improvement and energy consumption reduction. In order to reduce the energy consumption of the network, the clustering technique was used. The efficiency of the proposed TACRP routing protocol reached up to 86% which was 10% to 20% higher than the earlier works of ECHS and NRHCS protocols. Due to the improved traffic management system the overhead and delay of the network reduced which provided a way to transfer more data in a specific time, leading to reaching maximum throughput during the process of communication in the network. Hence the proposed TACRP routing protocol reached up to 543.16 Kbps, which was 200 Kbps to 300 Kbps higher than the earlier works of ECHS and NRHCS protocols. In the proposed model, network throughput was maximized and also the delay was low so the packet delivery ratio measured at the end of the simulation was 98.37% which was 5% to 10% higher than the earlier works of ECHS and NRHCS protocols. Finally, due to the use of an improved traffic management system, the data was transmitted from the source to the destination sequentially at the predefined time with a very low delay compared with the earlier works. Hence, the delay produced by the proposed method was 152.71 ms, whereas the ECHS and NRHCS protocol produced up to 359.14 ms and 296.47 ms, which was 150 ms to 200 ms higher than the proposed TACRP routing protocol. The overall performance achieved by the proposed TACRP routing protocol is higher than the earlier works like ECHS and NRHCS protocols in terms of efficiency, throughput and delivery ratio with very low network delay.
5.4. Network Performance Based on Dynamic Speed of Vehicles
The following parameters for speed of vehicles were concentrated on in the parameter analysis: average CH efficiency, average CM efficiency and average cluster numbers. The average CH efficiency was defined as the subtraction of the consumed energy of the CH to the initial energy of the CH. Similarly, average CM efficiency was the subtraction of the consumed energy to the initial energy of the CH. Both calculations were mathematically performed using Equation (13).
The parameters were calculated with a static number of vehicles, with a vehicle count of 200 vehicles with various speeds of vehicles from 0 to 90 Km/h and a transmission range of 200 m.
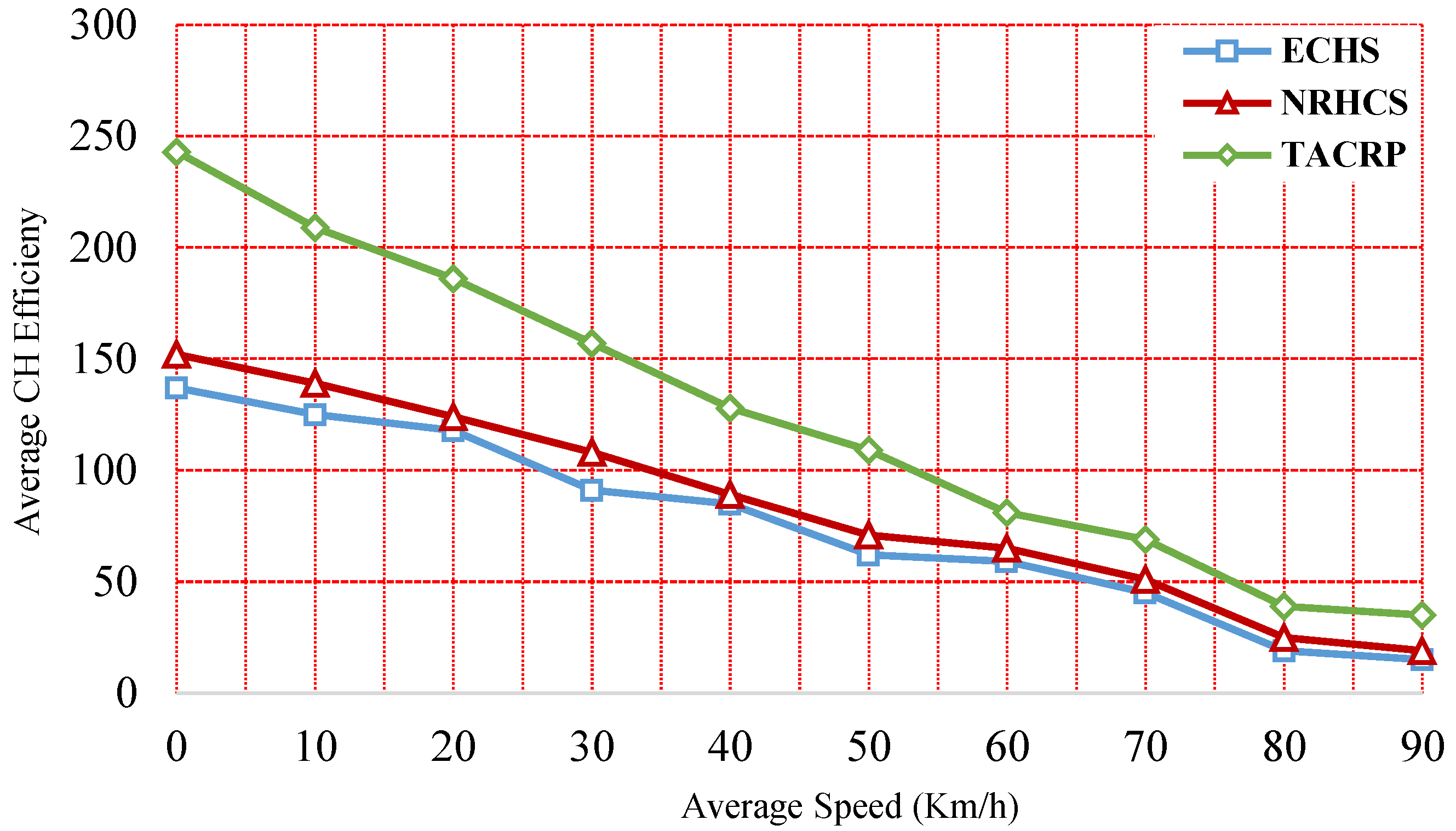
Figure 10 shows the calculation of the average CH efficiency of the proposed TACRP protocol and is compared with the earlier protocols, such as ECHS and NRHCS. The results showed that the increase in speed gradually reduced the efficiency of the CH when it was applied to the VANETs with huge mobility.
Table 5 shows the values of the cluster head energy efficiency calculation of the proposed TACRP protocol, and the ECHS and NRHCS protocols.
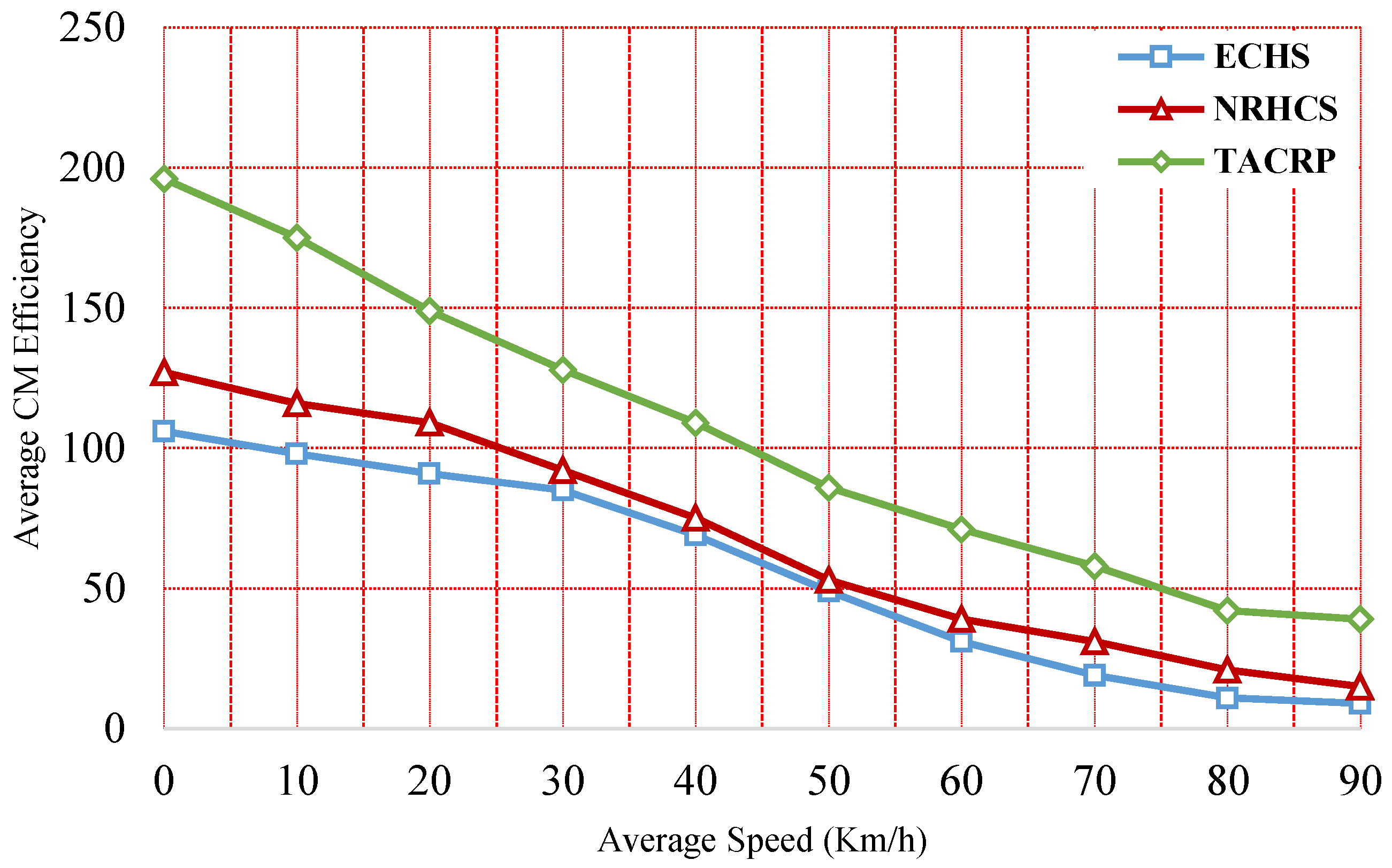
Figure 11 shows the calculation of the average CM efficiency of the proposed TACRP protocol and is compared with the earlier protocols, such as ECHS and NRHCS. The results showed that the increase in speed gradually reduced the efficiency of the CM when it was applied to the VANETs with huge mobility.
Table 5 shows the values of the cluster member energy efficiency calculation of the proposed TACRP protocol, and the ECHS, and NRHCS protocol.
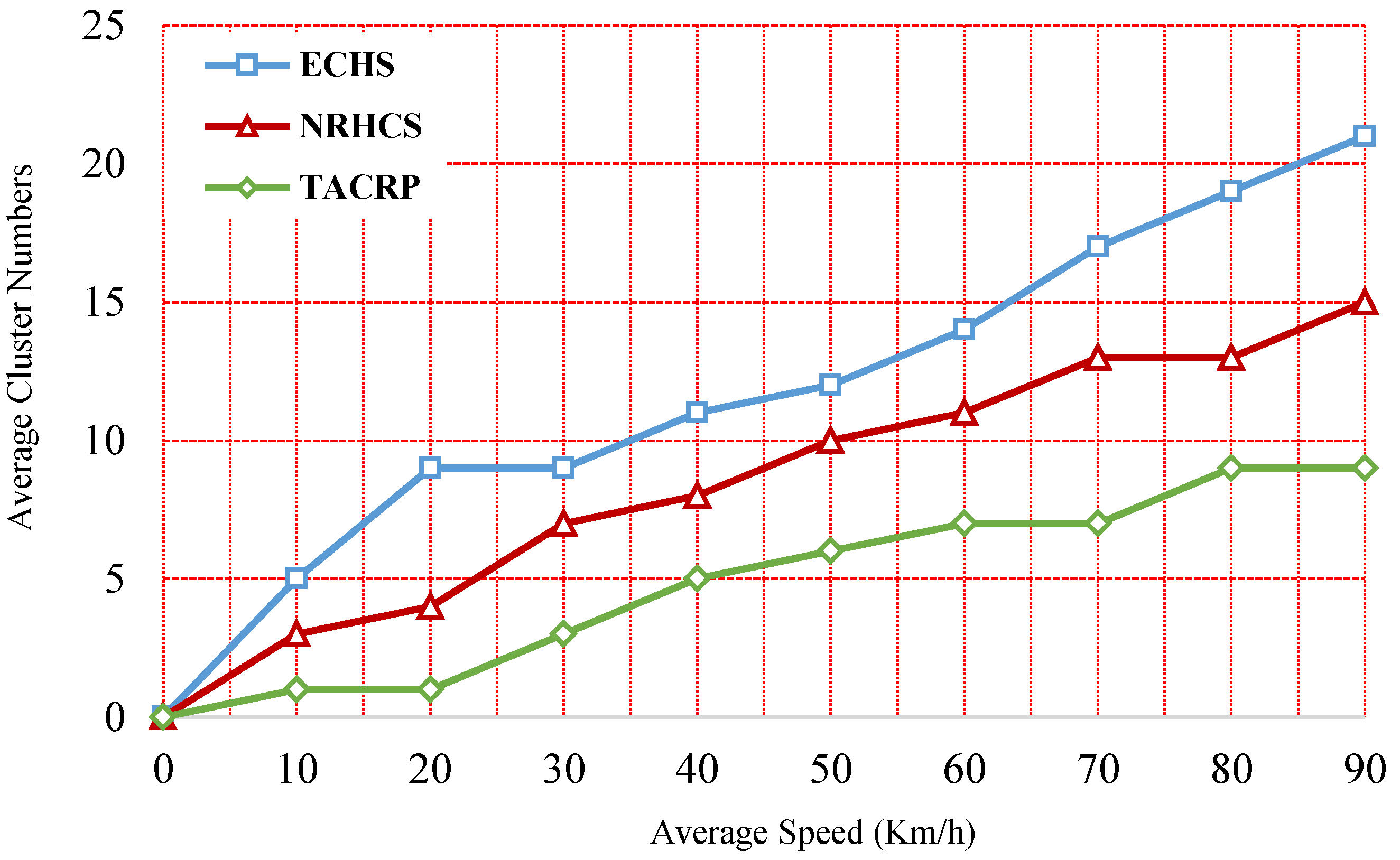
In
Figure 12 the calculation of the average cluster number of the proposed TACRP protocol and other comparison protocols are given with speed varying between 0 to 90 Km/h and a transmission range of 200 m. Here, the performance of the proposed TACRP protocol is compared with the earlier protocols such as the ECHS and NRHCS protocols. In
Table 4, the values of the average number of clusters created for 200 vehicles with a speed of 0 to 90 Km/h are given. In comparison to the ECHS and NRHCS protocols the proposed TACRP protocol created a lower number of clusters, which meant that each cluster could cover more CM and area. This could reduce the energy consumption of the network, reflected in efficiency enhancement.
Results Discussion Based on a Number of Vehicles
The parameters which were concentrated on, based on speed, were the average energy of the CH, the average energy of the CM and the average cluster numbers of the network. These parameters were calculated using the proposed TACRP protocol and it was compared with the earlier works, such as ECHS and NRHCS protocol. The major drawback in the earlier works were low throughput and packet delivery ratios with more consumed energy. Hence, the VANETs with more mobility during the process of transmission experienced more energy consumption. To overcome this in the proposed TACRP protocol the traffic was controlled and monitored frequently so that we could achieve more efficiency. The network efficiency was evaluated by calculating the average CH and CM efficiency. The CH and CM efficiencies were high when compared with the earlier ECHS and NRHCS protocols. CH efficiency was calculated in the speed range of 0 to 90 Km/h, where the efficiency varied from 243 to 35 s for the TACRP protocol. For the earlier ECHS and NRHCS protocols the CH efficiency ranged from 137 s to 15 s and 152 s to 19 s, respectively. CM efficiency of the proposed TACRP protocol varied from 196 s to 39 s, where the earlier ECHS and NRHCS protocols ranged from 106 s to 9 s and 127 s to 15 s, respectively. The values are given in
Table 4. The average cluster number counts, according to the variable speed, were calculated. For the TACRP protocol for a given speed, its ranged from 1 to 9 and for the earlier ECHS and NRHCS protocols it ranged from 5 to 21 and 3 to 15, respectively.
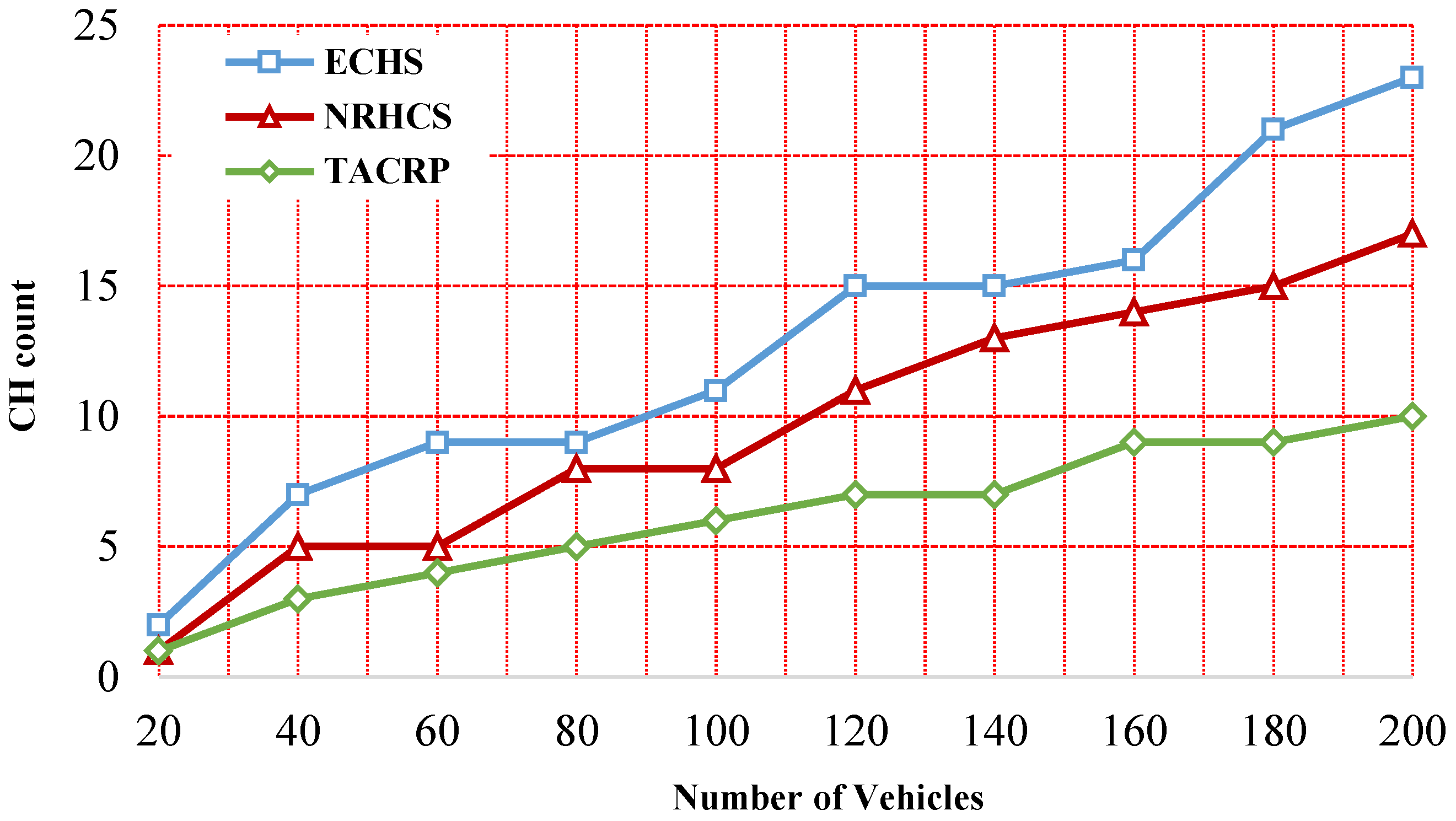
In
Figure 13, the CH, allocated according to the number of vehicles, was measured. From the figure, it is understood that the number of CH count reduced for the vehicles in the proposed method when compared with the earlier approaches.
6. Conclusions and Future Work
In this paper, we developed a new traffic management model, called Traffic-Aware Clustering-based Routing Protocol (TACRP), for large-scale and dynamic VANETs. The traffic management unit (TMU) is introduced in the protocol to control the entire network traffic, which includes the mobility information, neighborhood details of vehicles, RSUs’ information, and cluster management. Intra-cluster communication and traffic management are controlled by the cluster head (CH) and the CH is directed by the TMU. The TMU separates vehicles of similar speeds and directions so that cluster reliability is increased. Communication links become stable and, during communication links, failures and retransmissions are reduced, which leads to improved energy efficiency in the network. The performance of the TACRP routing protocol was compared with earlier works, notably the ECHS and NRHCS protocols, in terms of energy efficiency, network throughput, packet delivery ratio, and end-to-end delay of the network. The TACRP routing protocol showed superior performance in the comparative analysis which was achieved using the construction of a traffic management unit and stable clusters in the dynamically varying VANET topography. In future research, analyzing the performance of the proposed TACRP routing protocol with more multifaceted situations and other VANET challenges will be conducted.


 and
and 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}