
Back-Support Exoskeleton Control Strategy for Pulling Activities: Design and Preliminary Evaluation

 , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. Biomechanics of Pulling
1.2. Rationale for Assisting Pulling
2. Materials and Methods
2.1. Control Strategy
2.2. Experimental Design and Metrics
2.2.1. Experimental Design
- without the exoskeleton: no-exo;
- with the exoskeleton controlled with the pulling strategy defined in Equation (1), which will be referred to as exo.
2.2.2. Metrics
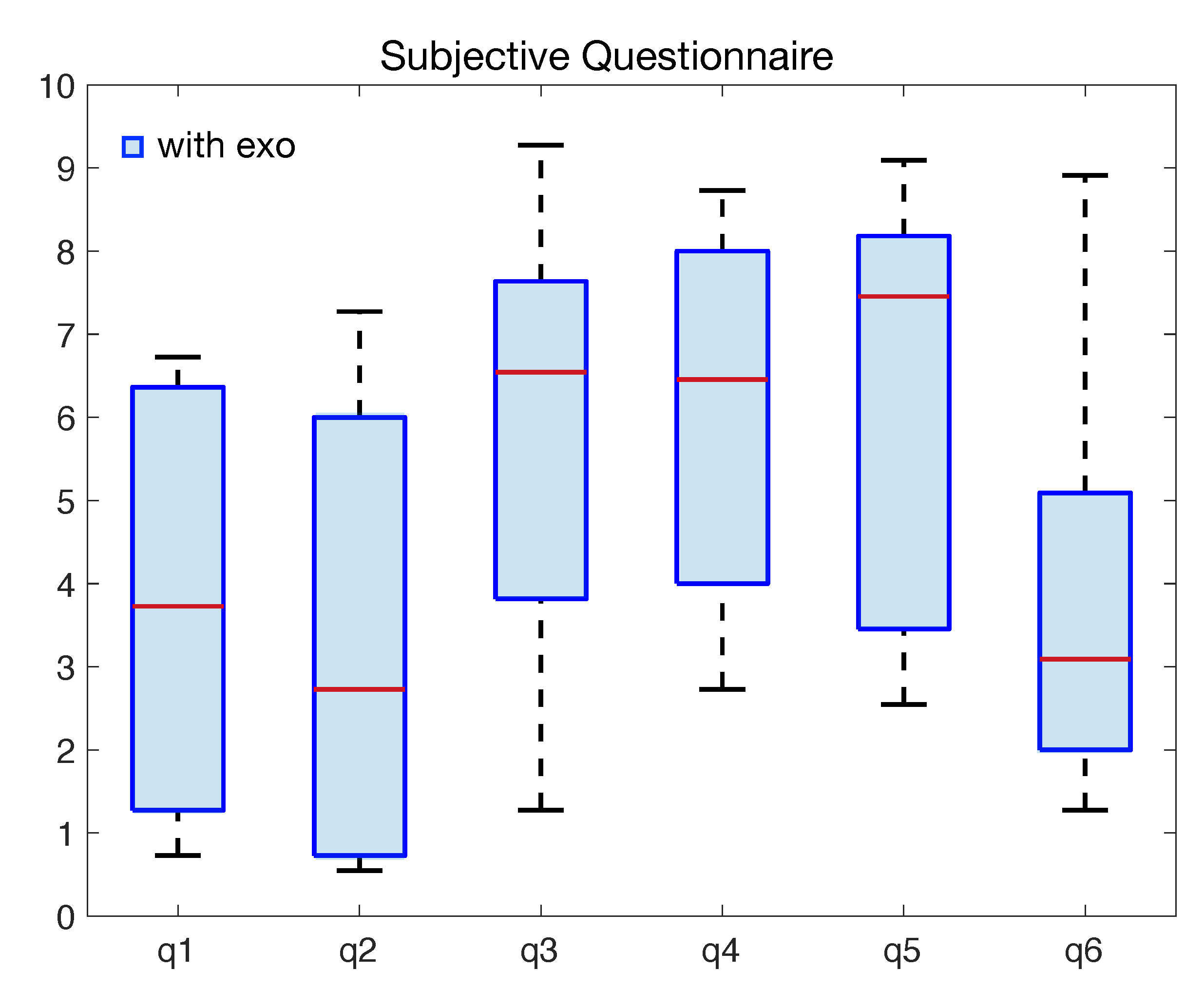
- (q1) The level of assistance is too high.
- (q2) I had to work against the assistance to accomplish my task.
- (q3) I feel the exoskeleton helps me to perform the task.
- (q4) I feel that the exoskeleton assistance is comfortable during the execution of the task.
- (q5) I find it easy and intuitive to operate the exoskeleton.
- (q6) I feel that my work performance is lower when using the exoskeleton (e.g., I work slower).
3. Results
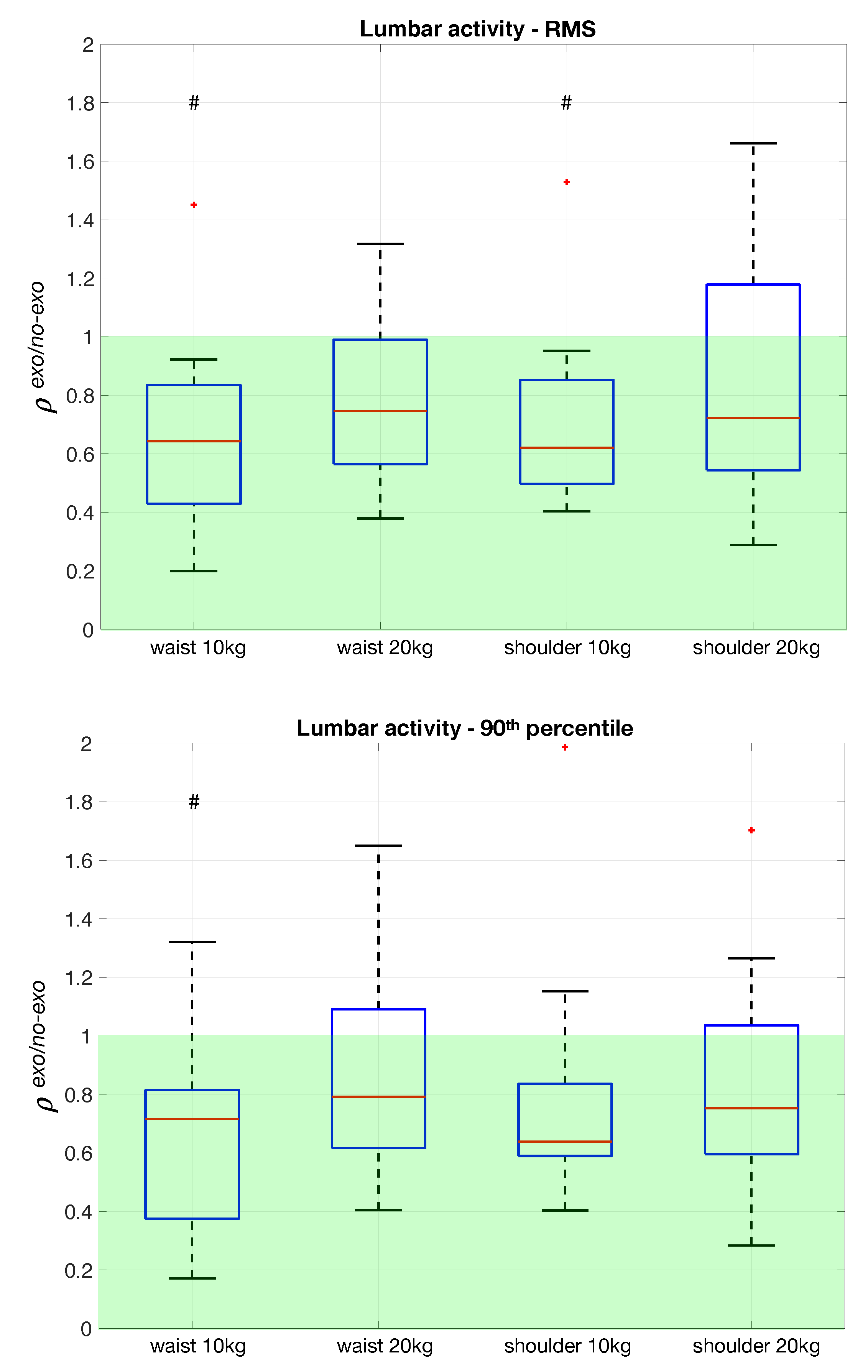
3.1. Muscle Activity
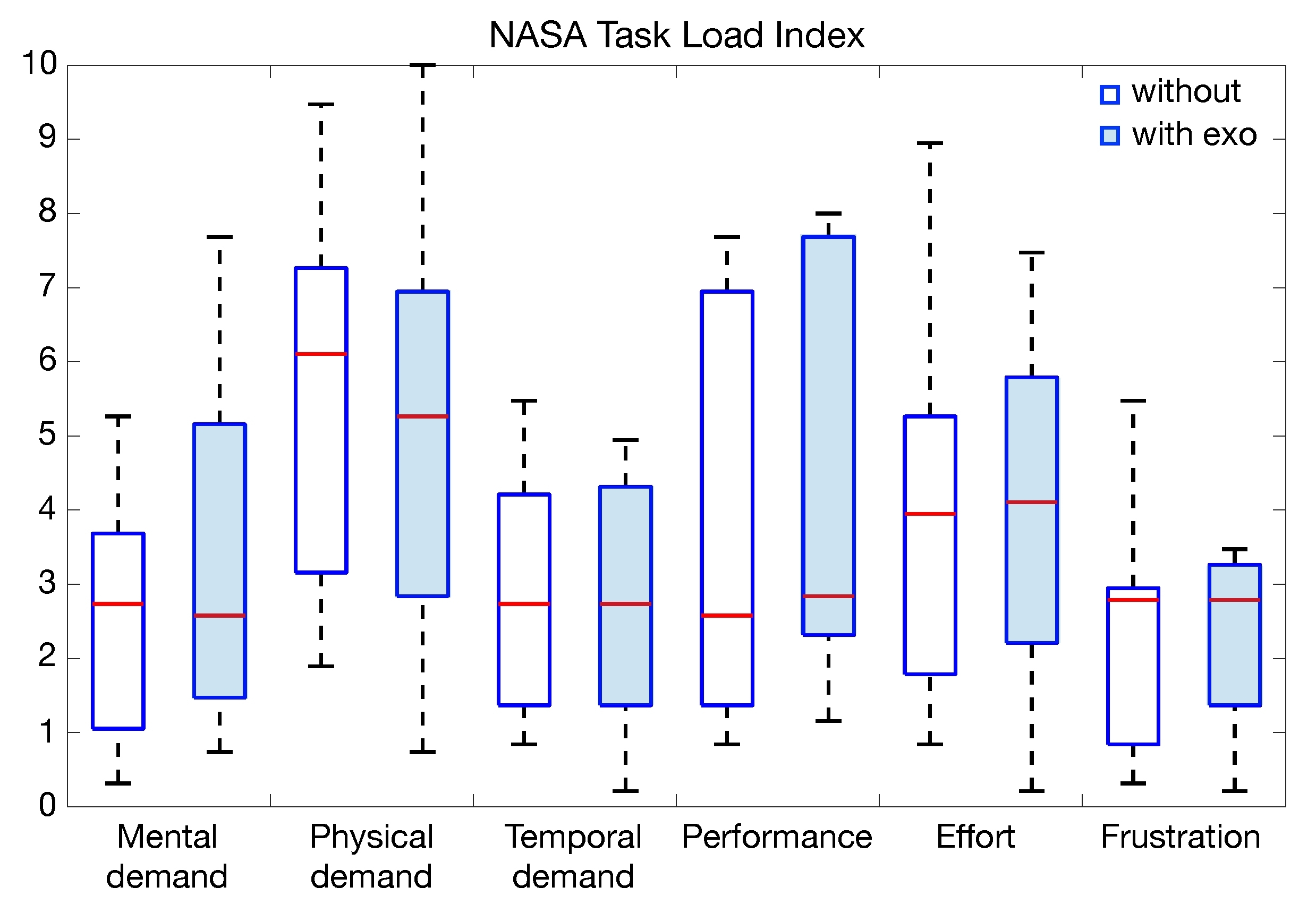
3.2. Subjective Measurements
4. Discussion
4.1. Effects of the Assistance on Muscle Activity and Subjective Measurements
4.2. Practical Implications
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Argubi-Wollesen, A.; Wollesen, B.; Leitner, M.; Mattes, K. Human body mechanics of pushing and pulling: Analyzing the factors of task-related strain on the musculoskeletal system. Saf. Health Work 2017, 8, 11–18. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S. Upper body push-pull strength of normal young adults in sagittal plane at three heights. Int. J. Ind. Ergon. 1995, 15, 427–436. [Google Scholar] [CrossRef]
- Schibye, B.; Søgaard, K.; Martinsen, D.; Klausen, K. Mechanical load on the low back and shoulders during pushing and pulling of two-wheeled waste containers compared with lifting and carrying of bags and bins. Clin. Biomech. 2001, 16, 549–559. [Google Scholar] [CrossRef]
- Marras, W.S.; Lavender, S.A.; Leurgans, S.E.; Fathallah, F.A.; Ferguson, S.A.; Gary Allread, W.; Rajulu, S.L. Biomechanical risk factors for occupationally related low back disorders. Ergonomics 1995, 38, 377–410. [Google Scholar] [CrossRef]
- Marras, W.S.; Granata, K.P.; Davis, K.G.; Allread, W.G.; Jorgensen, M.J. Spine loading and probability of low back disorder risk as a function of box location on a pallet. Hum. Factors Ergon. Manuf. Serv. Ind. 1997, 7, 323–336. [Google Scholar] [CrossRef]
- Plouvier, S.; Renahy, E.; Chastang, J.; Bonenfant, S.; Leclerc, A. Biomechanical strains and low back disorders: Quantifying the effects of the number of years of exposure on various types of pain. Occup. Environ. Med. 2008, 65, 268–274. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yip, V.Y.B. New low back pain in nurses: Work activities, work stress and sedentary lifestyle. J. Adv. Nurs. 2004, 46, 430–440. [Google Scholar] [CrossRef]
- Klein, B.P.; Jensen, R.C.; Sanderson, L.M. Assessment of workers’ compensation claims for back strains/sprains. J. Occup. Environ. Med. 1984, 26, 443–448. [Google Scholar] [CrossRef]
- Hoozemans, M.J.M.; van Der Beek, A.J.; Fringsdresen, M.H.W.; van Dijk, F.J.H.; van der Woude, L.H.V. Pushing and pulling in relation to musculoskeletal disorders: A review of risk factors. Ergonomics 1998, 41, 757–781. [Google Scholar] [CrossRef]
- The National Institute for Occupational Safety and Health (NIOSH). Engineering Controls Database. Available online: https://www.cdc.gov/niosh/engcontrols/ecd/detail25.html (accessed on 16 November 2018).
- de Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [Green Version]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Monica, L.; Anastasi, S.; Caldwell, D.G.; Ortiz, J. Back-Support Exoskeletons for Occupational Use: An Overview of Technological Advances and Trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef] [Green Version]
- Kermavnar, T.; de Vries, A.W.; de Looze, M.P.; O’Sullivan, L.W. Effects of industrial back-support exoskeletons on body loading and user experience: An updated systematic review. Ergonomics 2020, 64, 685–711. [Google Scholar] [CrossRef]
- Lazzaroni, M.; Tabasi, A.; Toxiri, S.; Caldwell, D.G.; De Momi, E.; Dijk, W.; de Looze, M.P.; Kingma, I.; van Dieën, J.H.; Ortiz, J. Evaluation of an acceleration-based assistive strategy to control a back-support exoskeleton for manual material handling. Wearable Technol. 2020, 1, e9. [Google Scholar] [CrossRef]
- Koopman, A.S.; Näf, M.; Baltrusch, S.J.; Kingma, I.; Rodriguez-Guerrero, C.; Babič, J.; de Looze, M.P.; van Dieën, J.H. Biomechanical evaluation of a new passive back support exoskeleton. J. Biomech. 2020, 105, 109795. [Google Scholar] [CrossRef]
- Koopman, A.S.; Toxiri, S.; Power, V.; Kingma, I.; van Dieën, J.H.; Ortiz, J.; de Looze, M.P. The effect of control strategies for an active back-support exoskeleton on spine loading and kinematics during lifting. J. Biomech. 2019, 91, 14–22. [Google Scholar] [CrossRef] [Green Version]
- Alemi, M.M.; Geissinger, J.; Simon, A.A.; Chang, S.E.; Asbeck, A.T. A passive exoskeleton reduces peak and mean EMG during symmetric and asymmetric lifting. J. Electromyogr. Kinesiol. 2019, 47, 25–34. [Google Scholar] [CrossRef]
- Baltrusch, S.J.; van Dieën, J.H.; van Bennekom, C.A.M.; Houdijk, H. The effect of a passive trunk exoskeleton on functional performance in healthy individuals. Appl. Ergon. 2018, 72, 94–106. [Google Scholar] [CrossRef] [Green Version]
- Kazerooni, H.; Tung, W.; Pillai, M. Evaluation of Trunk-Supporting Exoskeleton. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications Sage CA: Los Angeles, CA, 2019; Volume 63, pp. 1080–1083. [Google Scholar]
- Lamers, E.P.; Yang, A.J.; Zelik, K.E. Feasibility of a biomechanically-assistive garment to reduce low back loading during leaning and lifting. IEEE Trans. Biomed. Eng. 2017, 65, 1674–1680. [Google Scholar] [PubMed]
- Näf, M.B.; Koopman, A.S.; Baltrusch, S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Passive back support exoskeleton improves range of motion using flexible beams. Front. Robot. AI 2018, 5, 72. [Google Scholar] [CrossRef] [Green Version]
- Poliero, T.; Lazzaroni, M.; Toxiri, S.; Di Natali, C.; Caldwell, D.G.; Ortiz, J. Applicability of an active back-support exoskeleton to carrying activities. Front. Robot. AI 2020, 7, 157. [Google Scholar] [CrossRef]
- Poliero, T.; Mancini, L.; Caldwell, D.G.; Ortiz, J. Enhancing Back-Support Exoskeleton Versatility based on Human Activity Recognition. In Proceedings of the 2019 Wearable Robotics Association Conference (WearRAcon), Scottsdale, AZ, USA, 26–28 March 2019; pp. 86–91. [Google Scholar]
- de Looze, M.P.; van Greuningen, K.; Rebel, J.; Kingma, I.; Kuijer, P.P.F.M. Force direction and physical load in dynamic pushing and pulling. Ergonomics 2000, 43, 377–390. [Google Scholar] [CrossRef]
- de Looze, M.P.; Stassen, A.R.A.; Markslag, A.M.T.; Borst, M.J.; Wooning, M.M.; Toussaint, H.M. Mechanical loading on the low back in three methods of refuse collecting. Ergonomics 1995, 38, 1993–2006. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.S.; Chaffin, D.B.; Herrin, G.D.; Waikar, A.M. Effect of handle height on lower-back loading in cart pushing and pulling. Appl. Ergon. 1991, 22, 117–123. [Google Scholar] [CrossRef] [Green Version]
- Hoozemans, M.J.M.; Kuijer, P.P.F.M.; Kingma, I.; van Dieën, J.H.; de Vries, W.H.K.; van der Woude, L.H.V.; Veeger, D.J.; van der Beek, A.J.; Frings-Dresen, M.H.W. Mechanical loading of the low back and shoulders during pushing and pulling activities. Ergonomics 2004, 47, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Weston, E.B.; Aurand, A.; Dufour, J.S.; Knapik, G.G.; Marras, W.S. Biomechanically determined hand force limits protecting the low back during occupational pushing and pulling tasks. Ergonomics 2018, 61, 853–865. [Google Scholar] [CrossRef] [PubMed]
- Jäger, M.; Sawatzki, K.; Glitsch, U.; Ellegast, R.; Ottersbach, H.J.; Schaub, K.; Franz, G.; Luttmann, A. Load on the lumbar spine of flight attendants during pushing and pulling trolleys aboard aircraft. Int. J. Ind. Ergon. 2007, 37, 863–876. [Google Scholar] [CrossRef]
- Lett, K.K.; McGill, S.M. Pushing and pulling: Personal mechanics influence spine loads. Ergonomics 2006, 49, 895–908. [Google Scholar] [CrossRef]
- Division of Biomedical, and Behavioral Science; National Institute for Occupational Safety and Health. In Work Practices Guide for Manual Lifting; Technical Paper No. 81-122; Division of Biomedical, and Behavioral Science: Washington, DC, USA, 1981.
- McGill, S.M. Low Back Disorders: Evidence-Based Prevention and Rehabilitation; Human Kinetics: Champaign, IL, USA, 2015. [Google Scholar]
- Toxiri, S.; Koopman, A.S.; Lazzaroni, M.; Ortiz, J.; Power, V.; de Looze, M.P.; O’Sullivan, L.W.; Caldwell, D.G. Rationale, Implementation and Evaluation of Assistive Strategies for an Active Back-Support Exoskeleton. Front. Robot. AI 2018, 5, 53. [Google Scholar] [CrossRef] [Green Version]
- Kingma, I.; Bosch, T.; Bruins, L.; Van Dieën, J.H. Foot positioning instruction, initial vertical load position and lifting technique: Effects on low back loading. Ergonomics 2004, 47, 1365–1385. [Google Scholar] [CrossRef] [Green Version]
- Bennett, A.I.; Todd, A.I.; Desai, S.D. Pushing and pulling, technique and load effects: An electromyographical study. Work 2011, 38, 291–299. [Google Scholar] [CrossRef]
- Kao, H.C.; Lin, C.J.; Lee, Y.H.; Chen, S.H. The effects of direction of exertion, path, and load placement in nursing cart pushing and pulling tasks: An electromyographical study. PLoS ONE 2015, 10, e0140792. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.H.; Lee, Y.H.; Lin, C.J. Effects of load position and force direction on back muscle loading in one-wheeled wheelbarrow tasks. Work 2015, 51, 113–119. [Google Scholar] [CrossRef]
- Sjøgaard, G.; Kiens, B.; Jørgensen, K.; Saltin, B. Intramuscular pressure, EMG and blood flow during low-level prolonged static contraction in man. Acta Physiol. Scand. 1986, 128, 475–484. [Google Scholar] [CrossRef]
- Jonsson, B. The static load component in muscle work. Eur. J. Appl. Physiol. Occup. Physiol. 1988, 57, 305–310. [Google Scholar] [CrossRef]
- Rohmert, W. Problems of determination of rest allowances Part 2: Determining rest allowances in different human tasks. Appl. Ergon. 1973, 4, 158–162. [Google Scholar] [CrossRef]
- Song, Y.W.; Chung, M.K. Quantitative assessment of trunk muscle coactivation in sub-maximal isometric exertion tasks. Int. J. Ind. Ergon. 2004, 34, 13–20. [Google Scholar] [CrossRef]
- Sposito, M.; Di Natali, C.; Toxiri, S.; Caldwell, D.G.; De Momi, E.; Ortiz, J. Exoskeleton kinematic design robustness: An assessment method to account for human variability. Wearable Technol. 2020, 1. [Google Scholar] [CrossRef]
- Snook, S.H.; Ciriello, V.M. The design of manual handling tasks: Revised tables of maximum acceptable weights and forces. Ergonomics 1991, 34, 1197–1213. [Google Scholar] [CrossRef]
- Di Natali, C.; Chini, G.; Toxiri, S.; Monica, L.; Anastasi, S.; Draicchio, F.; Caldwell, D.G.; Ortiz, J. Equivalent Weight: Connecting Exoskeleton Effectiveness with Ergonomic Risk during Manual Material Handling. Int. J. Environ. Res. Public Health 2021, 18, 2677. [Google Scholar] [CrossRef]
- Stegeman, D.; Hermens, H. Standards for surface electromyography: The European project Surface EMG for non-invasive assessment of muscles (SENIAM). Enschede Roessingh Res. Dev. 2007, 108–112. [Google Scholar]
- Drake, J.D.M.; Callaghan, J.P. Elimination of electrocardiogram contamination from electromyogram signals: An evaluation of currently used removal techniques. J. Electromyogr. Kinesiol. 2006, 16, 175–187. [Google Scholar] [CrossRef]
- Potvin, J.R.; Norman, R.W.; McGill, S.M. Mechanically corrected EMG for the continuous estimation of erector spinae muscle loading during repetitive lifting. Eur. J. Appl. Physiol. Occup. Physiol. 1996, 74, 119–132. [Google Scholar] [CrossRef] [PubMed]
- Halaki, M.; Ginn, K. Normalization of EMG signals: To normalize or not to normalize and what to normalize to? In Computational Intelligence in Electromyography Analysis—A Perspective on Current Applications and Future Challenges; IntechOpen: London, UK, 2012. [Google Scholar]
- McGill, S.M. Electromyographic activity of the abdominal and low back musculature during the generation of isometric and dynamic axial trunk torque: Implications for lumbar mechanics. J. Orthop. Res. 1991, 9, 91–103. [Google Scholar] [CrossRef]
- Vera-Garcia, F.J.; Moreside, J.M.; McGill, S.M. MVC techniques to normalize trunk muscle EMG in healthy women. J. Electromyogr. Kinesiol. 2010, 20, 10–16. [Google Scholar] [CrossRef] [PubMed]
- Jonsson, B. Measurement and evaluation of local muscular strain in the shoulder during constrained work. J. Hum. Ergol. 1982, 11, 73–88. [Google Scholar]
- Brereton, L.C.; McGill, S.M. Effects of physical fatigue and cognitive challenges on the potential for low back injury. Hum. Mov. Sci. 1999, 18, 839–857. [Google Scholar] [CrossRef]
- Adams, M.A.; Dolan, P. Spine biomechanics. J. Biomech. 2005, 38, 1972–1983. [Google Scholar] [CrossRef]
- Kersten, P.; Küçükdeveci, A.A.; Tennant, A. The use of the Visual Analogue Scale (VAS) in rehabilitation outcomes. J. Rehabil. Med. 2012, 44, 609. [Google Scholar] [CrossRef] [Green Version]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1988; Volume 52, pp. 139–183. [Google Scholar]
- Hara, H.; Sankai, Y. Development of HAL for lumbar support. In SCIS & ISIS SCIS & ISIS 2010, Japan; Japan Society for Fuzzy Theory and Intelligent Informatics: Fukuoka, Japan, 2010; pp. 416–421. [Google Scholar]
- German Bionic. German Bionic CRAY X. 2018. Available online: https://www.germanbionic.com (accessed on 29 June 2021).
- Ko, H.K.; Lee, S.W.; Koo, D.; Lee, I.; Hyun, D.J. Waist-assistive exoskeleton powered by a singular actuation mechanism for prevention of back-injury. Robot. Auton. Syst. 2018, 107, 1–9. [Google Scholar] [CrossRef]
- Waters, T.R.; Putz-Anderson, V.; Garg, A.; Fine, L.J. Revised NIOSH equation for the design and evaluation of manual lifting tasks. Ergonomics 1993, 36, 749–776. [Google Scholar] [CrossRef]
- Davis, K.G.; Jorgensen, M.J.; Marras, W.S. An investigation of perceived exertion via whole body exertion and direct muscle force indicators during the determination of the maximum acceptable weight of lift. Ergonomics 2000, 43, 143–159. [Google Scholar] [CrossRef] [PubMed]
- Jorgensen, M.J.; Davis, K.G.; Kirking, B.C.; Lewis, K.E.K.; Marras, W.S. Significance of biomechanical and physiological variables during the determination of maximum acceptable weight of lift. Ergonomics 1999, 42, 1216–1232. [Google Scholar] [CrossRef] [PubMed]
- Cafolla, D.; Chen, I.; Ceccarelli, M. An experimental characterization of human torso motion. Front. Mech. Eng. 2015, 10, 311–325. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Waist 10 kg | Waist 20 kg | Shoulder 10 kg | Shoulder 20 kg | |
|---|---|---|---|---|
| 9 | 8 | 9 | 6 | |
| 1 | 2 | 1 | 4 |
| Waist 10 kg | Waist 20 kg | Shoulder 10 kg | Shoulder 20 kg | |
|---|---|---|---|---|
| 8 | 7 | 8 | 6 | |
| 2 | 3 | 2 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazzaroni, M.; Poliero, T.; Sposito, M.; Toxiri, S.; Caldwell, D.G.; Di Natali, C.; Ortiz, J. Back-Support Exoskeleton Control Strategy for Pulling Activities: Design and Preliminary Evaluation. Designs 2021, 5, 39. https://doi.org/10.3390/designs5030039
Lazzaroni M, Poliero T, Sposito M, Toxiri S, Caldwell DG, Di Natali C, Ortiz J. Back-Support Exoskeleton Control Strategy for Pulling Activities: Design and Preliminary Evaluation. Designs. 2021; 5(3):39. https://doi.org/10.3390/designs5030039
Chicago/Turabian StyleLazzaroni, Maria, Tommaso Poliero, Matteo Sposito, Stefano Toxiri, Darwin G. Caldwell, Christian Di Natali, and Jesús Ortiz. 2021. "Back-Support Exoskeleton Control Strategy for Pulling Activities: Design and Preliminary Evaluation" Designs 5, no. 3: 39. https://doi.org/10.3390/designs5030039
APA StyleLazzaroni, M., Poliero, T., Sposito, M., Toxiri, S., Caldwell, D. G., Di Natali, C., & Ortiz, J. (2021). Back-Support Exoskeleton Control Strategy for Pulling Activities: Design and Preliminary Evaluation. Designs, 5(3), 39. https://doi.org/10.3390/designs5030039