

Flexible Synthetic Inertia Optimization in Modern Power Systems




Abstract
1. Introduction
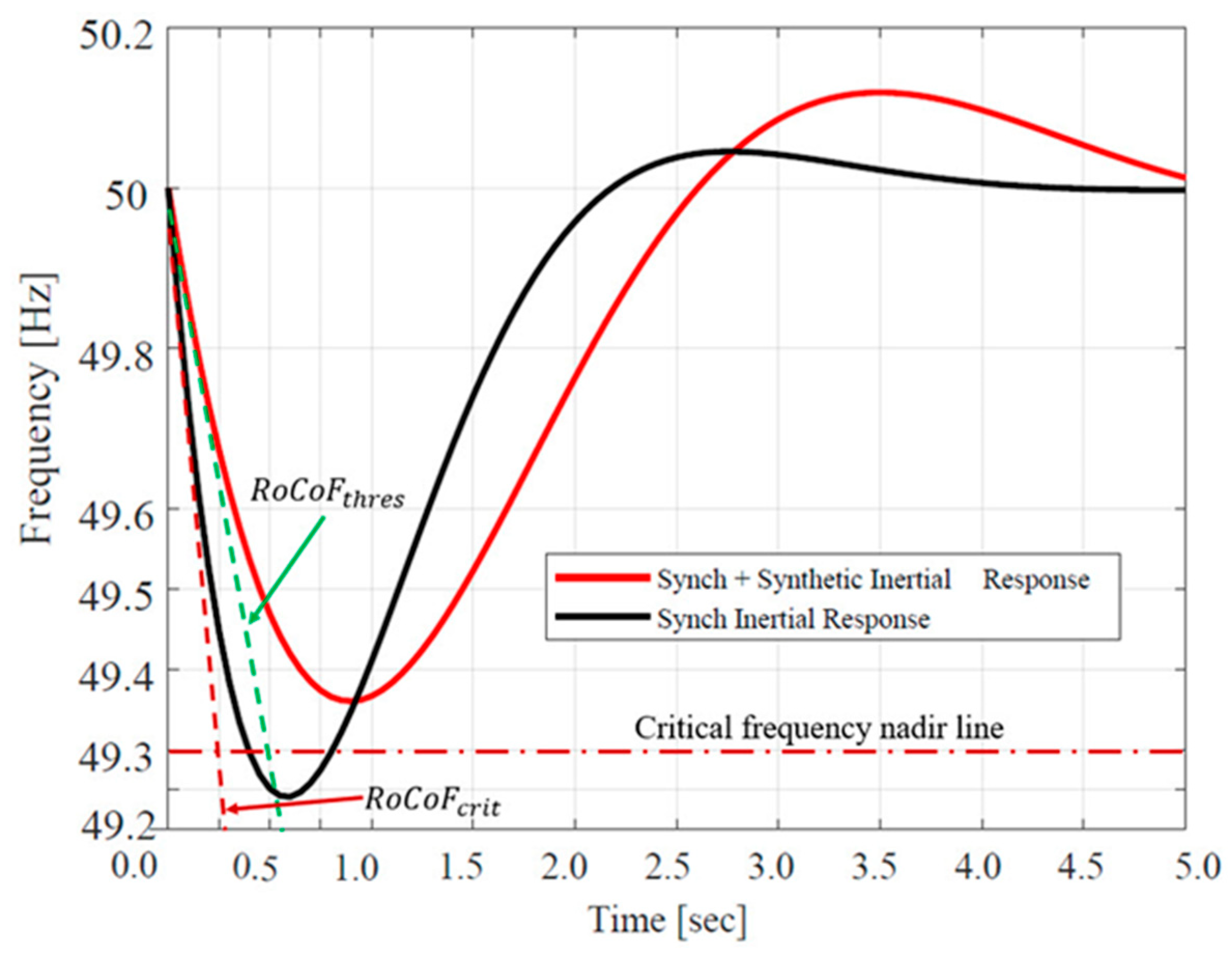
- RoCoFs and frequency nadir are improved due to optimal SI activation following a contingency event in the network.
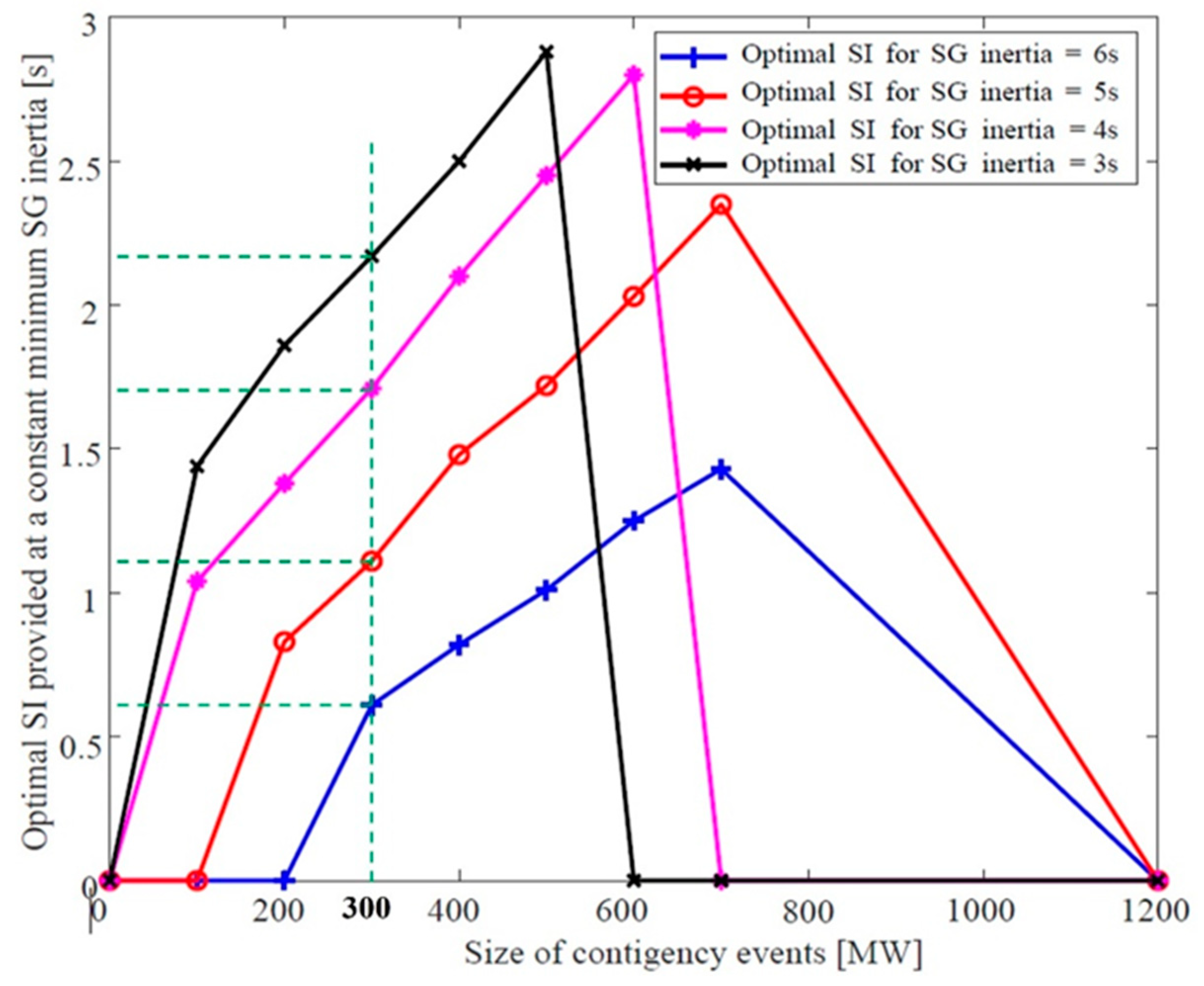
- The best values of SI are provided at the given minimum value of SG inertia at the optimal cost.
- SI flexibility is assured depending on the values of minimum SG inertia and the contingency severity.
2. Materials and Methods
2.1. Problem Formulation for Optimal Synthetic Inertia Provision in Power Systems
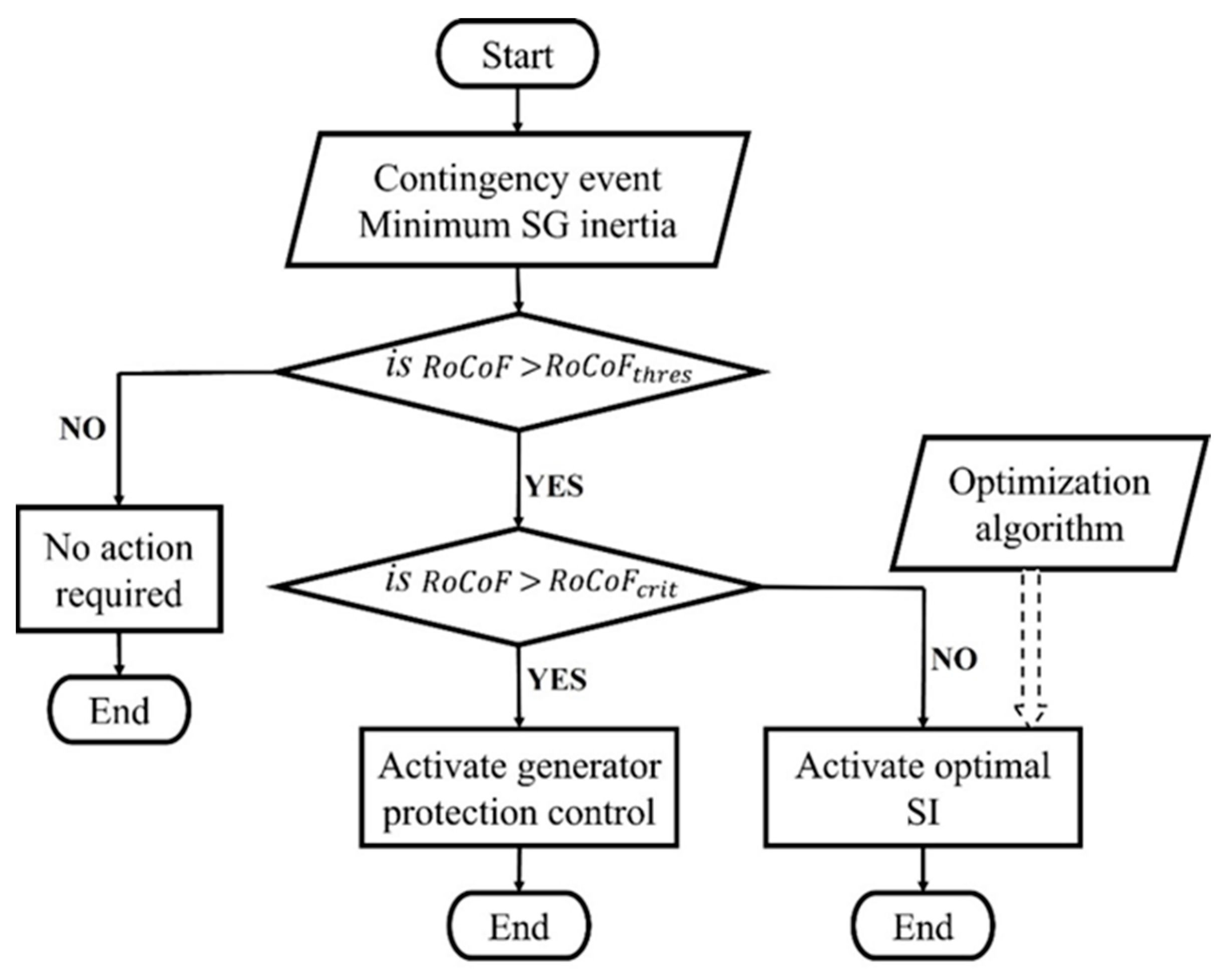
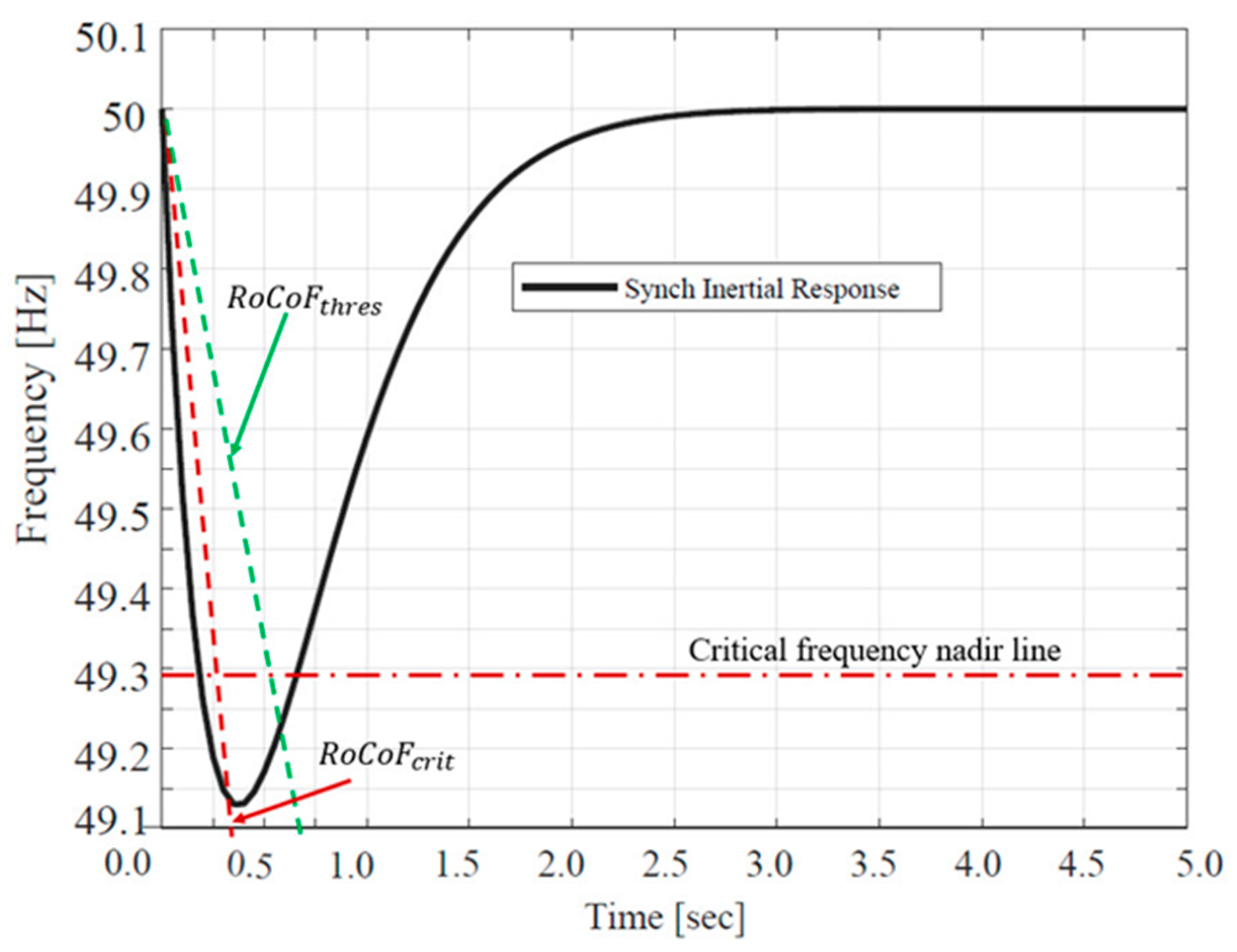
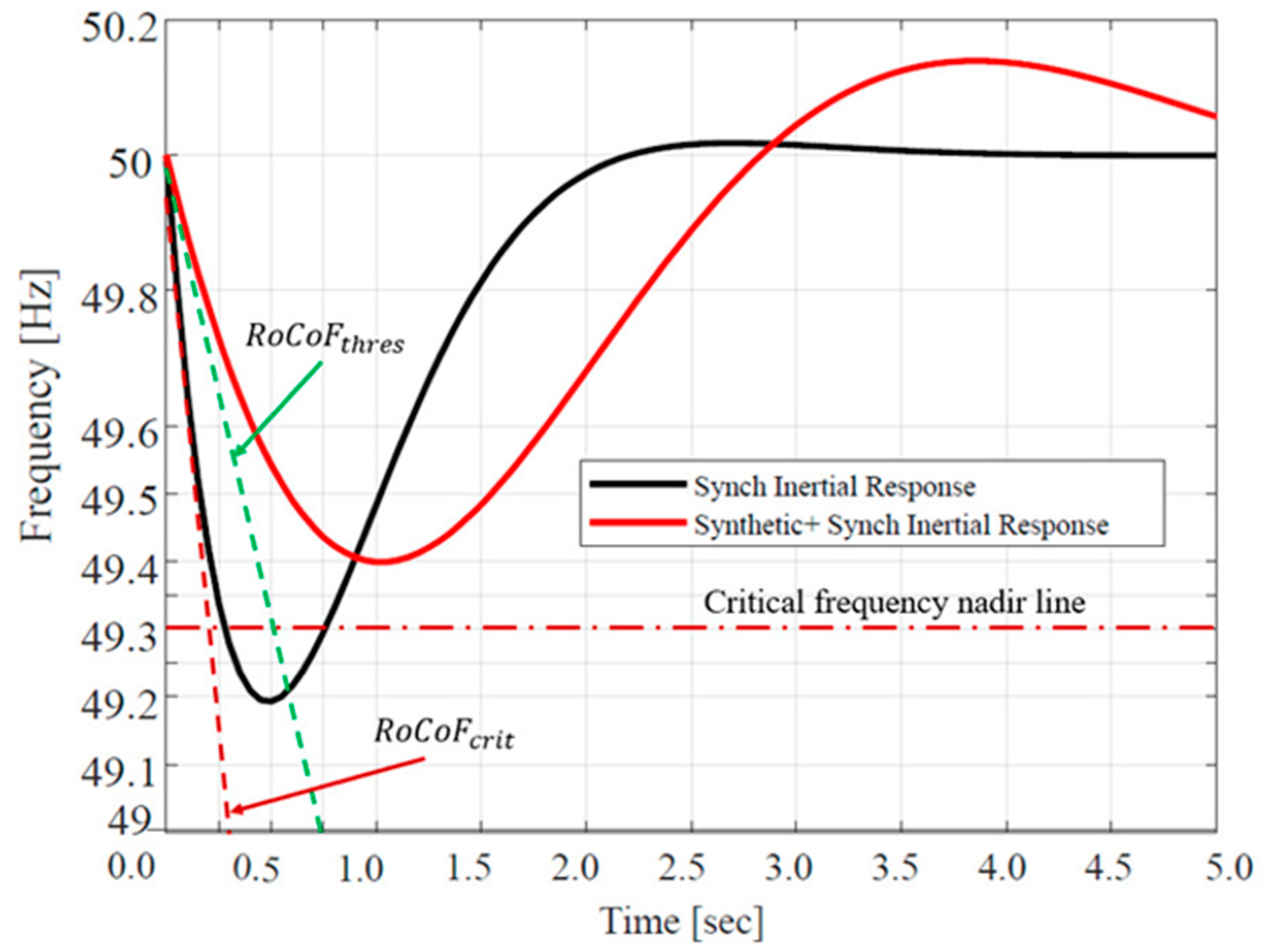
- After a contingency event is detected in the network, the initial RoCoF is obtained.
- The algorithm reads the resulting RoCoF and compares it with the set threshold and critical values of RoCoF.
- Based on the recorded value of the initial RoCoF and the minimum value of SG inertia, the amount of SI needed to maintain the RoCoF in case the initial RoCoF is beyond the threshold value is evaluated.
2.2. The Proposed Flexible Inertia Optimization Method
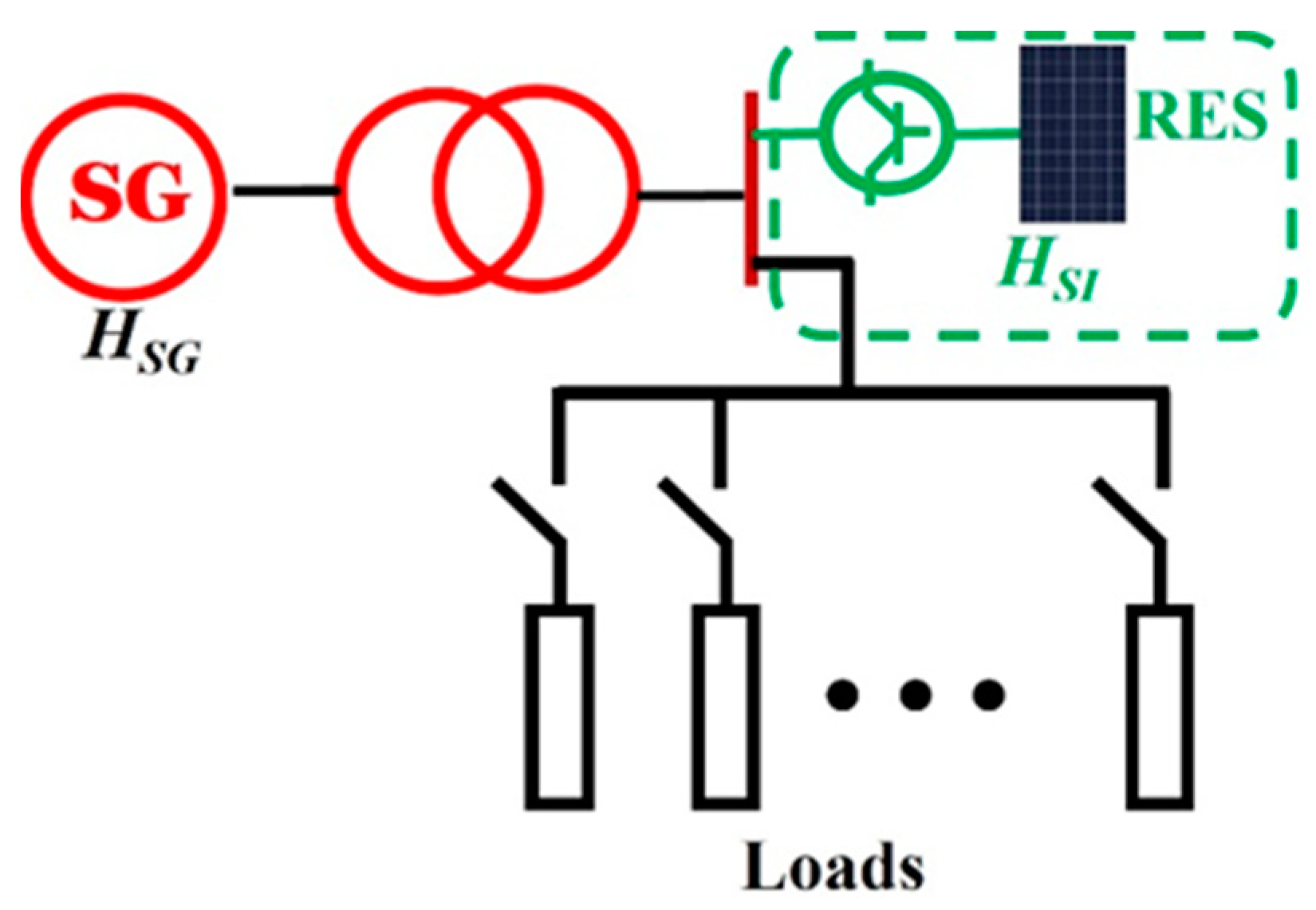
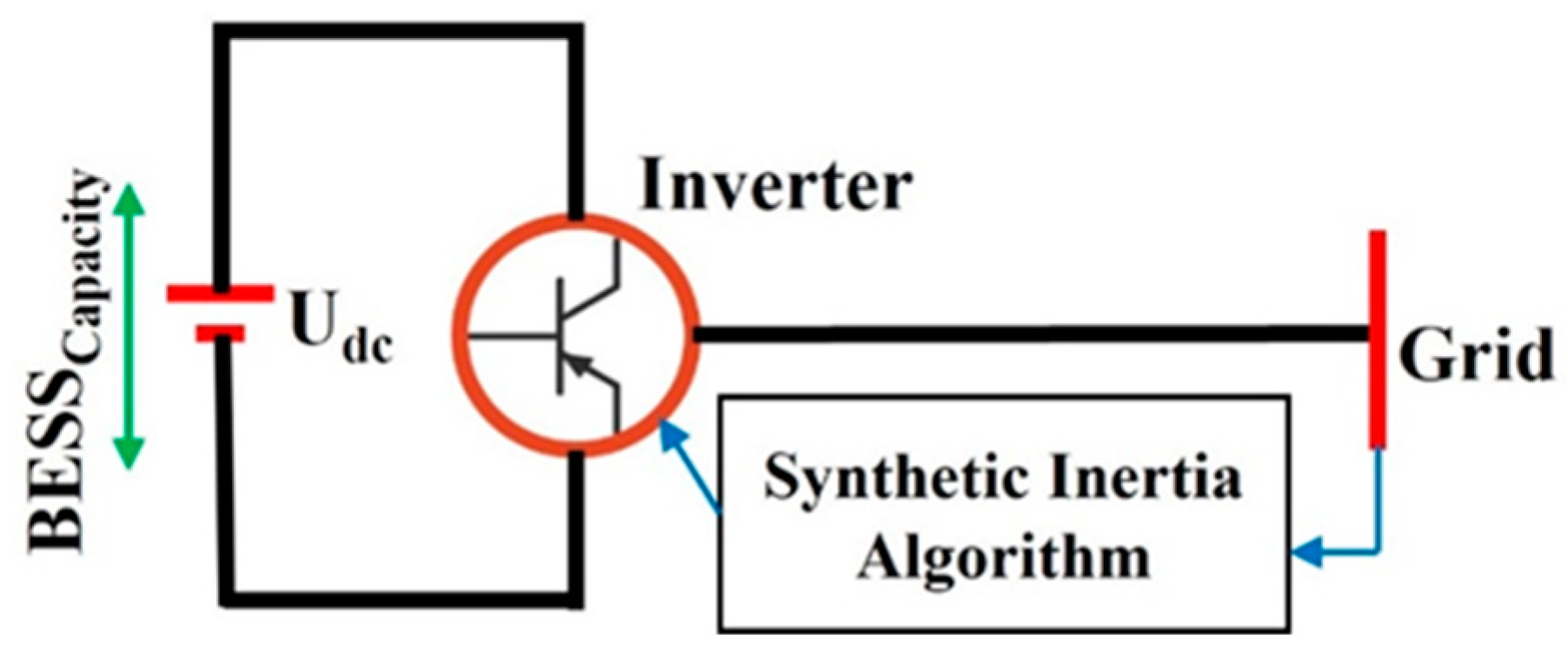
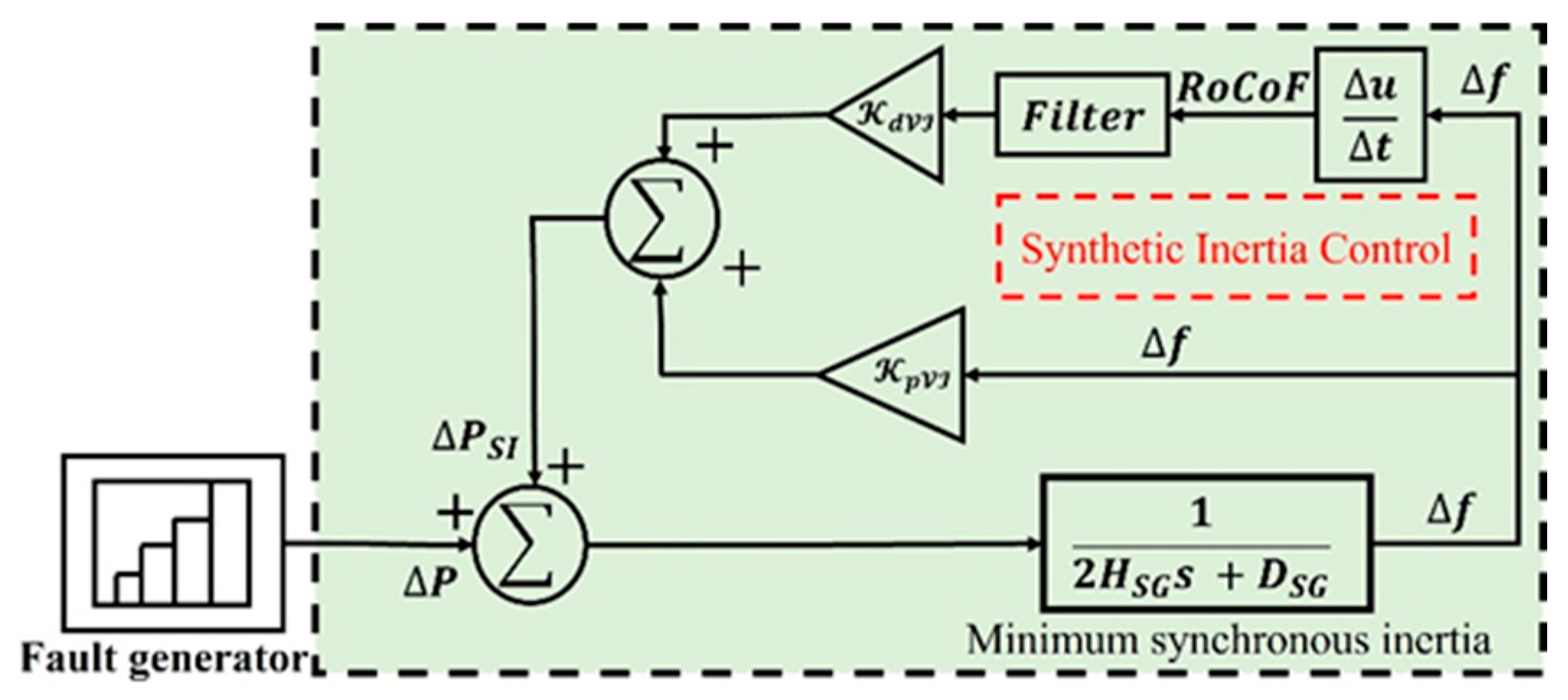
2.2.1. Model Description and Inertial Response
2.2.2. Synthetic Inertia Optimization
- Step 1: Choose initial points for and of SI, based on the available SG inertia in the network. Also choose the size reduction parameter for each variable and a termination parameter . Set ,
- Step 2: If terminate the optimization process, else create by adding and subtracting /2 from each variable at the point ,
- Step 3: Compute function values at all ( +1) points. Find the point having the minimum function value. Designate the minimum point to be ,
- Step 4: If , reduce size parameters = /2 and go to Step 2, else set and go to Step 2.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| BESS | Battery energy storage system |
| DER | Distributed energy resources |
| GB | Great Britain |
| MFAT | Ministry of foreign affairs and trade |
| MW | Megawatt |
| OPPT | Optimized power point tracking |
| PSO | Power system operators |
| PV | Photovoltaic |
| RES | Renewable energy sources |
| RoCoF | Rate of change of frequency |
| SG | Synchronous generator |
| SI | Synthetic inertia |
| VI | Virtual inertia |
| VSWT | Variable speed wind turbines |
| WT | Wind turbines |
References
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.-M.; Hannegan, B. Achieving a 100% Renewable Grid: Operating Electric Power Systems with Extremely High Levels of Variable Renewable Energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Brown, T.; Bischof-Niemz, T.; Blok, K.; Breyer, C.; Lund, H.; Mathiesen, B.V. Response to ‘Burden of proof: A comprehensive review of the feasibility of 100% renewable-electricity systems’. Renew. Sustain. Energy Rev. 2018, 92, 834–847. [Google Scholar] [CrossRef]
- Connolly, D.; Mathiesen, B.V. A technical and economic analysis of one potential pathway to a 100% renewable energy system. Int. J. Sustain. Energy Plan. Manag. 2014, 1, 7–28. [Google Scholar]
- Mathiesen, B.V.; Lund, H.; Karlsson, K. 100% Renewable energy systems, climate mitigation and economic growth. Appl. Energy 2011, 88, 488–501. [Google Scholar] [CrossRef]
- Thiesen, H.; Jauch, C.; Gloe, A. Design of a system substituting today’s inherent inertia in the European continental synchronous area. Energies 2016, 9, 582. [Google Scholar] [CrossRef]
- Rakhshani, E.; Gusain, D.; Sewdien, V.; Torres, J.L.R.; Van Der Meijden, M.A. A key performance indicator to assess the frequency stability of wind generation dominated power system. IEEE Access 2019, 7, 130957–130969. [Google Scholar] [CrossRef]
- Poolla, B.K.; Groß, D.; Dörfler, F. Placement and implementation of grid-forming and grid-following virtual inertia and fast frequency response. IEEE Trans. Power Syst. 2019, 34, 3035–3046. [Google Scholar] [CrossRef]
- Makolo, P.; Zamora, R.; Lie, T.-T. Heuristic Inertia Estimation Technique for Power Networks with High Penetration of RES. In Proceedings of the 2020 2nd International Conference on Smart Power & Internet Energy Systems (SPIES), Bangkok, Thailand, 15–18 September 2020; pp. 356–361. [Google Scholar]
- Makolo, P.; Zamora, R.; Lie, T.-T. The role of inertia for grid flexibility under high penetration of variable renewables-A review of challenges and solutions. Renew. Sustain. Energy Rev. 2021, 147, 111223. [Google Scholar] [CrossRef]
- Mancarella, P.; Billimoria, F. The Fragile Grid: The Physics and Economics of Security Services in Low-Carbon Power Systems. IEEE Power Energy Mag. 2021, 19, 79–88. [Google Scholar] [CrossRef]
- Ujjwol, T.; Dipesh, S.; Manisha, M.; Bishnu, P.B.; Timothy, M.H.; Reinaldo, T. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Kosmecki, M.; Rink, R.; Wakszyńska, A.; Ciavarella, R.; Di Somma, M.; Papadimitriou, C.N.; Efthymiou, V.; Graditi, G. A Methodology for Provision of Frequency Stability in Operation Planning of Low Inertia Power Systems. Energies 2021, 14, 737. [Google Scholar] [CrossRef]
- Chamorro, H.R.; Sanchez, A.C.; Øverjordet, A.; Jimenez, F.; Gonzalez-Longatt, F.; Sood, V.K. Distributed synthetic inertia control in power systems. In Proceedings of the 2017 International Conference on Energy and Environment (CIEM), Bucharest, Romania, 19–20 October 2017; pp. 74–78. [Google Scholar]
- Altin, M.; Kuhlmann, J.C.; Das, K.; Hansen, A.D. Optimization of synthetic inertial response from wind power plants. Energies 2018, 11, 1051. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Fast-Frequency Response provided by DFIG-Wind Turbines and its impact on the grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Paturet, M.; Markovic, U.; Delikaraoglou, S.; Vrettos, E.; Aristidou, P.; Hug, G. Stochastic unit commitment in low-inertia grids. IEEE Trans. Power Syst. 2020, 35, 3448–3458. [Google Scholar] [CrossRef]
- Badesa, L.; Teng, F.; Strbac, G. Pricing inertia and frequency response with diverse dynamics in a mixed-integer second-order cone programming formulation. Appl. Energy 2020, 260, 114334. [Google Scholar] [CrossRef]
- Venkatraman, A.; Markovic, U.; Shchetinin, D.; Vrettos, E.; Aristidou, P.; Hug, G. Improving Dynamic Performance of Low-Inertia Systems through Eigensensitivity Optimization. IEEE Trans. Power Syst. 2021, 36, 4075–4088. [Google Scholar] [CrossRef]
- Paturet, M.; Markovic, U.; Delikaraoglou, S.; Vrettos, E.; Aristidou, P.; Hug, G. Economic valuation and pricing of inertia in inverter-dominated power systems. arXiv 2020, arXiv:2005.11029. [Google Scholar]
- Poolla, B.K.; Bolognani, S.; Li, N.; Dörfler, F. A market mechanism for virtual inertia. IEEE Trans. Smart Grid 2020, 11, 3570–3579. [Google Scholar] [CrossRef]
- Gu, H.; Yan, R.; Saha, T.K. Minimum synchronous inertia requirement of renewable power systems. IEEE Trans. Power Syst. 2017, 33, 1533–1543. [Google Scholar] [CrossRef]
- Liang, Z.; Mieth, R.; Dvorkin, Y. Inertia Pricing in Stochastic Electricity Markets. arXiv 2021, arXiv:2107.04101. [Google Scholar] [CrossRef]
- Chu, Z.; Markovic, U.; Hug, G.; Teng, F. Towards optimal system scheduling with synthetic inertia provision from wind turbines. IEEE Trans. Power Syst. 2020, 35, 4056–4066. [Google Scholar] [CrossRef]
- Teng, F.; Strbac, G. Assessment of the role and value of frequency response support from wind plants. IEEE Trans. Sustain. Energy 2016, 7, 586–595. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y.; Turschner, D.; Beck, H.-P. Enhanced virtual inertia control based on derivative technique to emulate simultaneous inertia and damping properties for microgrid frequency regulation. IEEE Access 2019, 7, 14422–14433. [Google Scholar] [CrossRef]
- Fang, J.; Zhang, R.; Li, H.; Tang, Y. Frequency derivative-based inertia enhancement by grid-connected power converters with a frequency-locked-loop. IEEE Trans. Smart Grid 2018, 10, 4918–4927. [Google Scholar] [CrossRef]
- Ruttledge, L.; Flynn, D. Emulated inertial response from wind turbines: Gain scheduling and resource coordination. IEEE Trans. Power Syst. 2015, 31, 3747–3755. [Google Scholar] [CrossRef]
- Guggilam, S.S.; Zhao, C.; Dall’Anese, E.; Chen, Y.C.; Dhople, S.V. Optimizing DER participation in inertial and primary-frequency response. IEEE Trans. Power Syst. 2018, 33, 5194–5205. [Google Scholar] [CrossRef]
- Poolla, B.K.; Bolognani, S.; Dörfler, F. Optimal placement of virtual inertia in power grids. IEEE Trans. Autom. Control 2017, 62, 6209. (In English) [Google Scholar] [CrossRef]
- Ademola-Idowu, A.; Zhang, B. Optimal Design of Virtual Inertia and Damping Coefficients for Virtual Synchronous Machines. arXiv 2018, arXiv:1806.08488. [Google Scholar]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-Garcia, Á. A review of virtual inertia techniques for renewable energy-based generators. Renew. Energy-Technol. Appl. 2020. [Google Scholar]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Yang, L.; Hu, Z. Implementation of Dynamic Virtual Inertia Control of Supercapacitors for Multi-Area PV-Based Microgrid Clusters. Sustainability 2020, 12, 3299. [Google Scholar] [CrossRef]
- Pagnier, L.; Jacquod, P. Optimal placement of inertia and primary control: A matrix perturbation theory approach. IEEE Access 2019, 7, 145889–145900. [Google Scholar] [CrossRef]
- Thiesen, H.; Jauch, C. Determining the load inertia contribution from different power consumer groups. Energies 2020, 13, 1588. [Google Scholar] [CrossRef]
- Eriksson, R.; Modig, N.; Elkington, K. Synthetic inertia versus fast frequency response: A definition. IET Renew. Power Gener. 2017, 12, 507–514. [Google Scholar] [CrossRef]
- Makolo, P.; Zamora, R.; Lie, T. Online inertia estimation for power systems with high penetration of RES using recursive parameters estimation. IET Renew. Power Gener. 2021, 15, 2571–2585. [Google Scholar] [CrossRef]
- Makolo, P.; Oladeji, I.; Zamora, R.; Lie, T.-T. Data-driven inertia estimation based on frequency gradient for power systems with high penetration of renewable energy sources. Electr. Power Syst. Res. 2021, 195, 107171. [Google Scholar] [CrossRef]
- Deb, K. Optimization for Engineering Design: Algorithms and Examples; PHI Learning Pvt. Ltd.: Delhi, India, 2012. [Google Scholar]
- Liberzon, D. Calculus of Variations and Optimal Control Theory; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value (s) | Parameter | Value (s) |
|---|---|---|---|
| 4.0 | 3.5 | ||
| 3.6 | 4.5 | ||
| 3.8 | 5.0 | ||
| 3.2 | 4.0 | ||
| 3.6 | 4.6 | ||
| 3.7 | 4.5 | ||
| 3.3 | 5.0 | ||
| 3.2 | 4.0 | ||
| 3.1 | 4.5 | ||
| 3.5 | 5.5 |
| (MW) | SI (s) | % of SI in Inertial Response | ||
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 |
| 100 | 0 | 0 | 0 | 0 |
| 200 | 0 | 0 | 0 | 0 |
| 300 | 12 | 6.2 | 0.61 | 5 |
| 400 | 11 | 6.0 | 0.82 | 8 |
| 500 | 9.8 | 6.1 | 1.01 | 11 |
| 600 | 9.5 | 5.8 | 1.25 | 13 |
| 700 | 8.1 | 4.7 | 1.43 | 15 |
| 1200 | 0 | 0 | 0 | 0 |
| (MW) | SI (s) | % of SI in Inertial Response | ||
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 |
| 100 | 4.5 | 2.2 | 1.44 | 15 |
| 200 | 4.2 | 1.8 | 1.86 | 20 |
| 300 | 3.6 | 1.5 | 2.17 | 23 |
| 400 | 3.5 | 1.2 | 2.50 | 27 |
| 500 | 3.1 | 0.8 | 2.88 | 31 |
| 600 | 0 | 0 | 0 | 0 |
| 700 | 0 | 0 | 0 | 0 |
| 1200 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Makolo, P.; Zamora, R.; Perera, U.; Lie, T.T. Flexible Synthetic Inertia Optimization in Modern Power Systems. Inventions 2024, 9, 18. https://doi.org/10.3390/inventions9010018
Makolo P, Zamora R, Perera U, Lie TT. Flexible Synthetic Inertia Optimization in Modern Power Systems. Inventions. 2024; 9(1):18. https://doi.org/10.3390/inventions9010018
Chicago/Turabian StyleMakolo, Peter, Ramon Zamora, Uvini Perera, and Tek Tjing Lie. 2024. "Flexible Synthetic Inertia Optimization in Modern Power Systems" Inventions 9, no. 1: 18. https://doi.org/10.3390/inventions9010018
APA StyleMakolo, P., Zamora, R., Perera, U., & Lie, T. T. (2024). Flexible Synthetic Inertia Optimization in Modern Power Systems. Inventions, 9(1), 18. https://doi.org/10.3390/inventions9010018