Development of a Bridge Inspection Robot Capable of Traveling on Splicing Parts


Abstract
1. Introduction
2. Required Bridge Inspection Robots
2.1. Performance Requirements for Robots
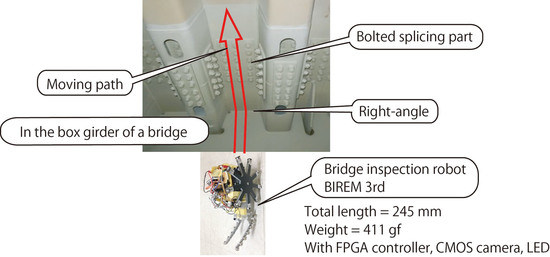
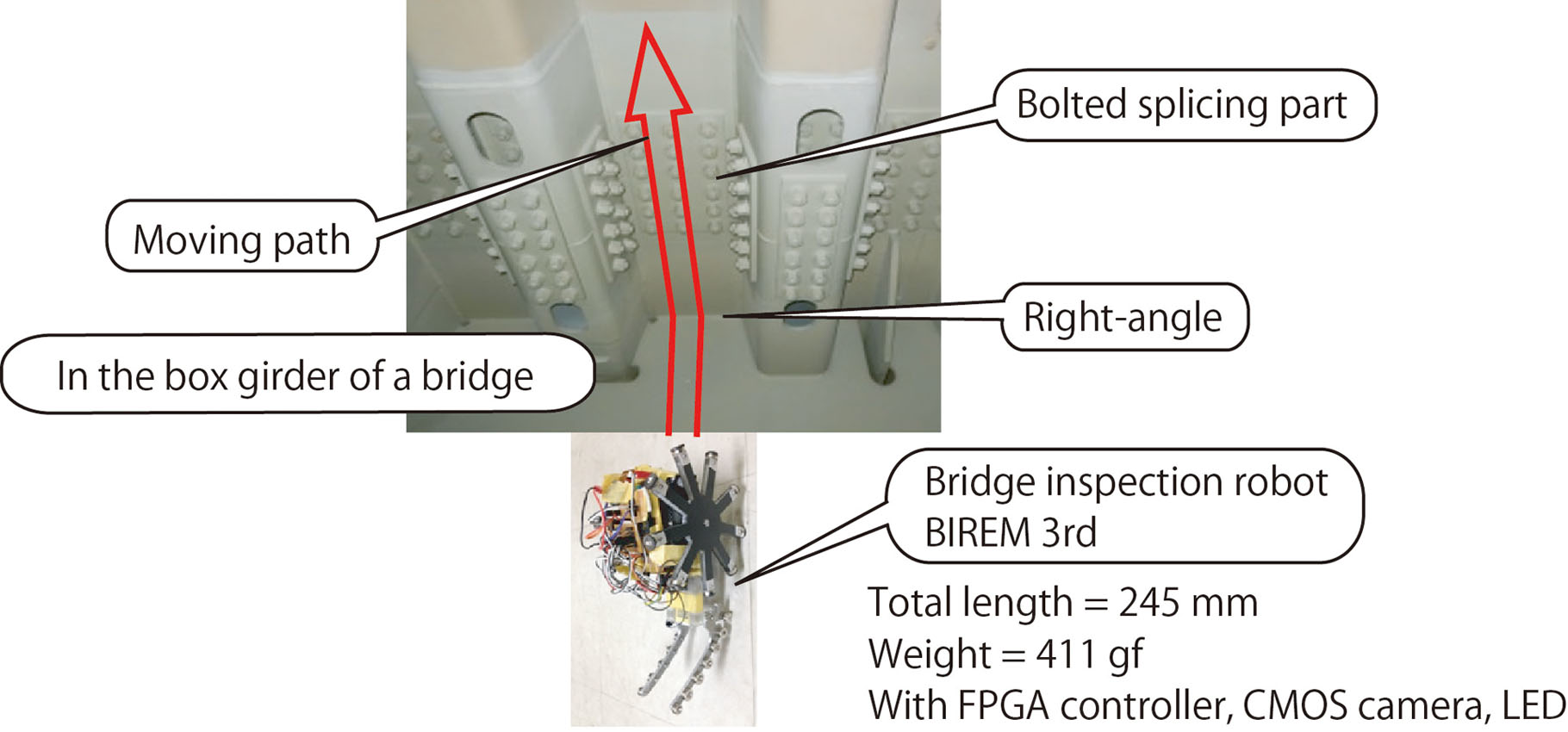
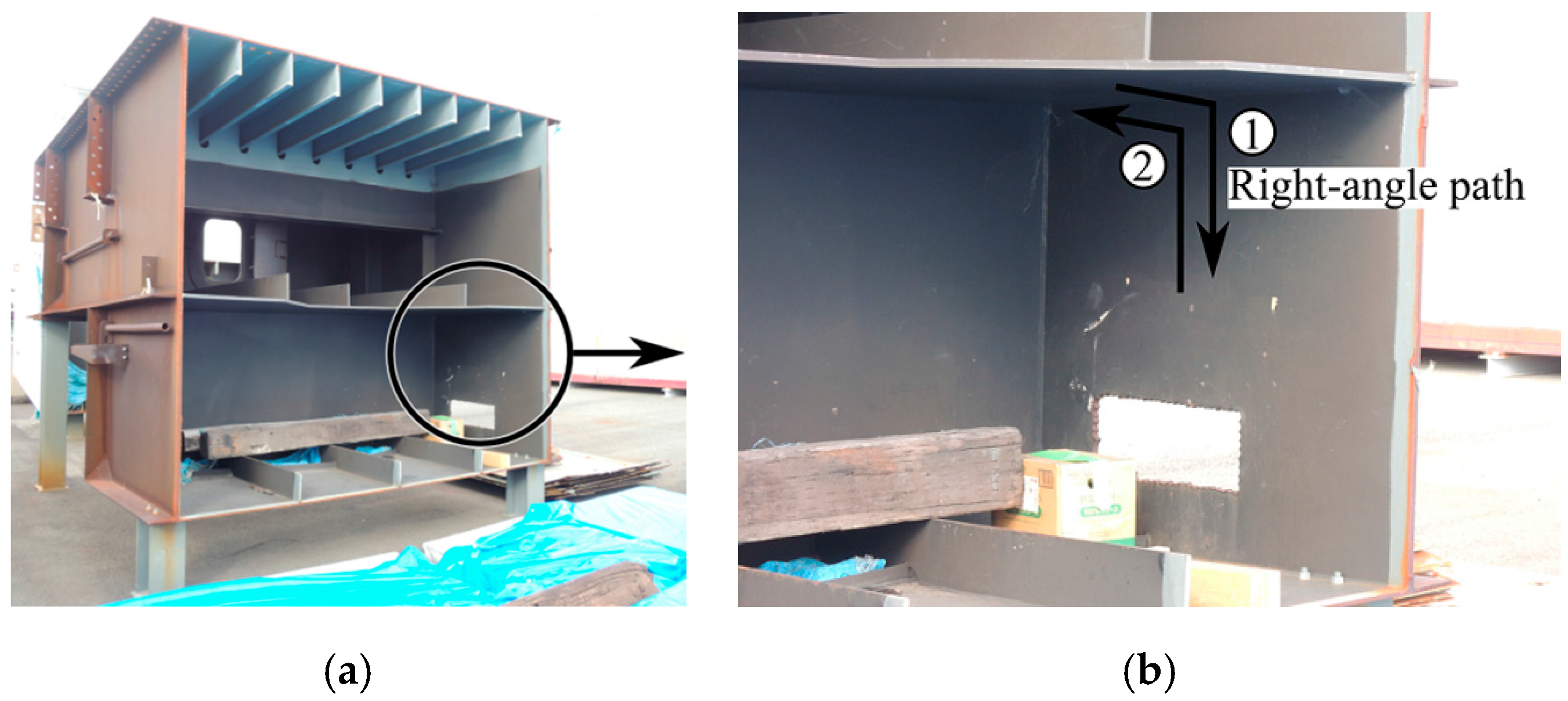
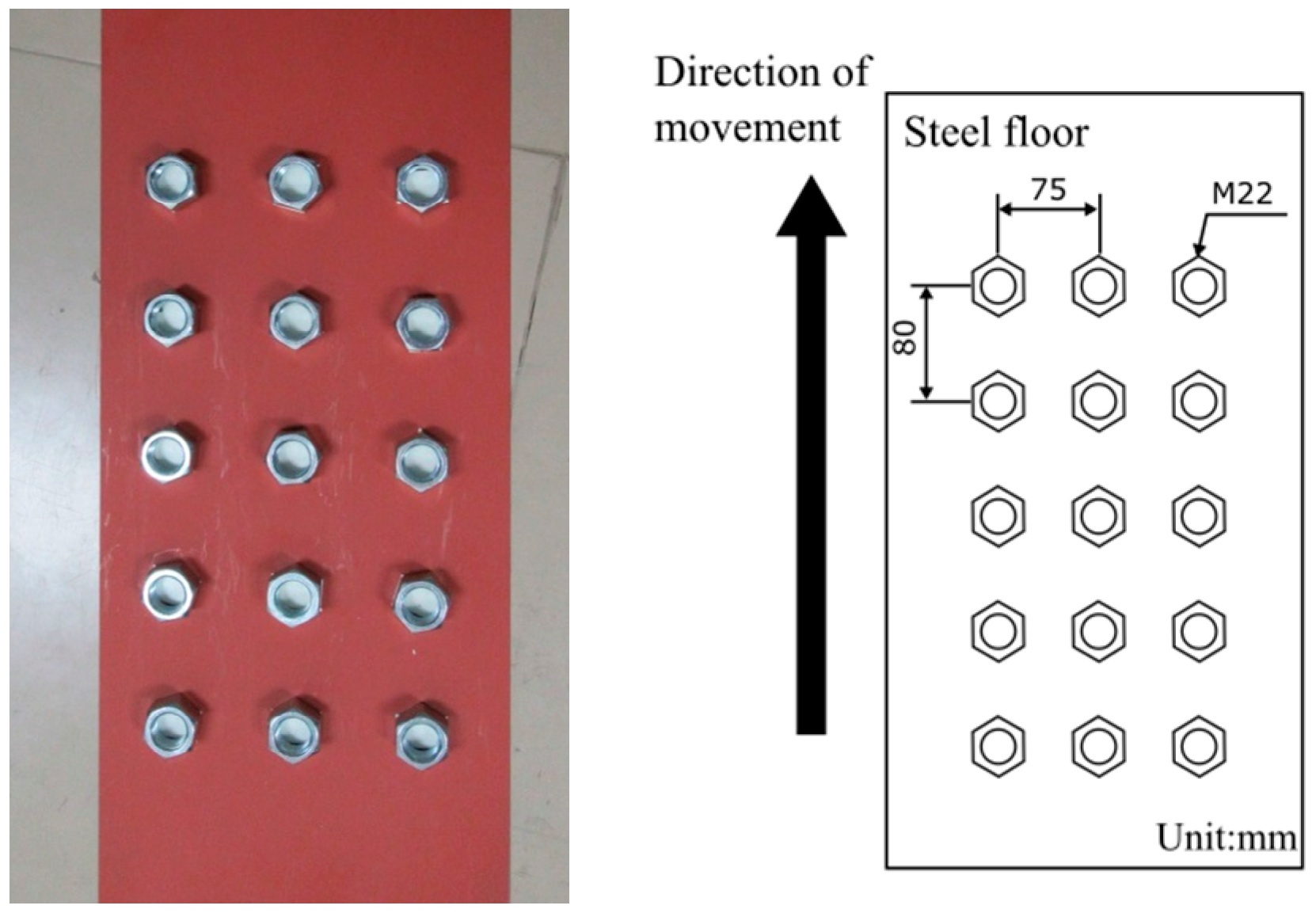
2.2. Splicing Parts in a Box Girder
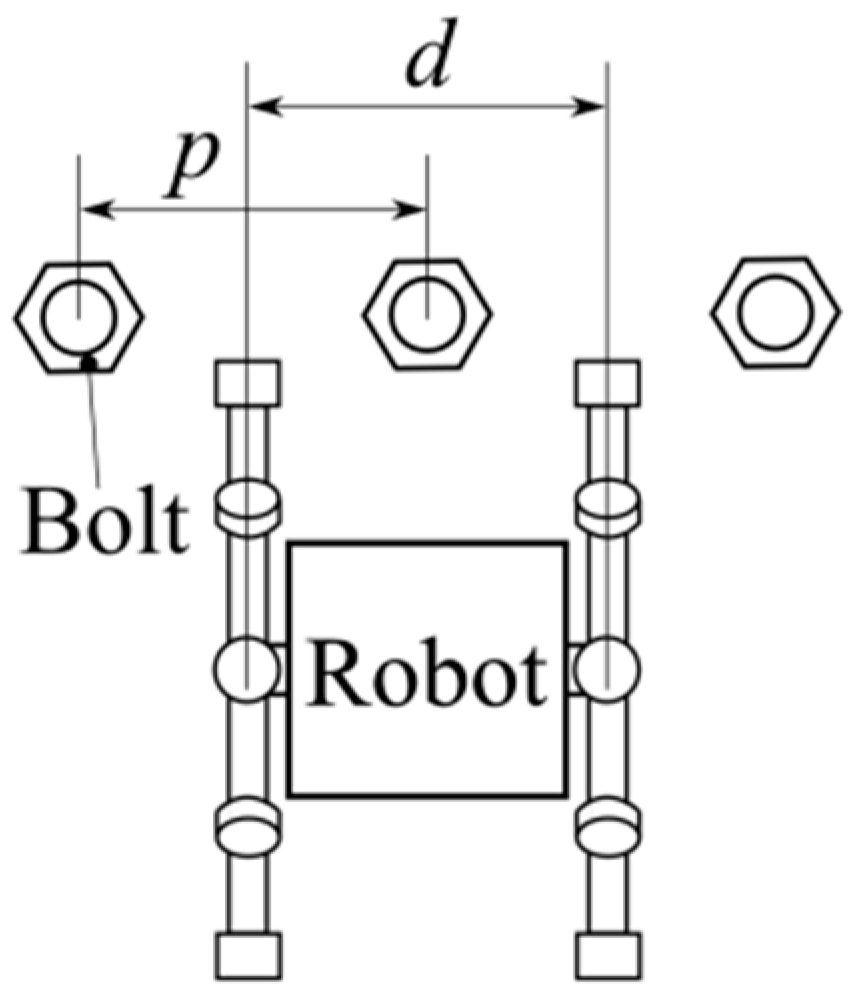
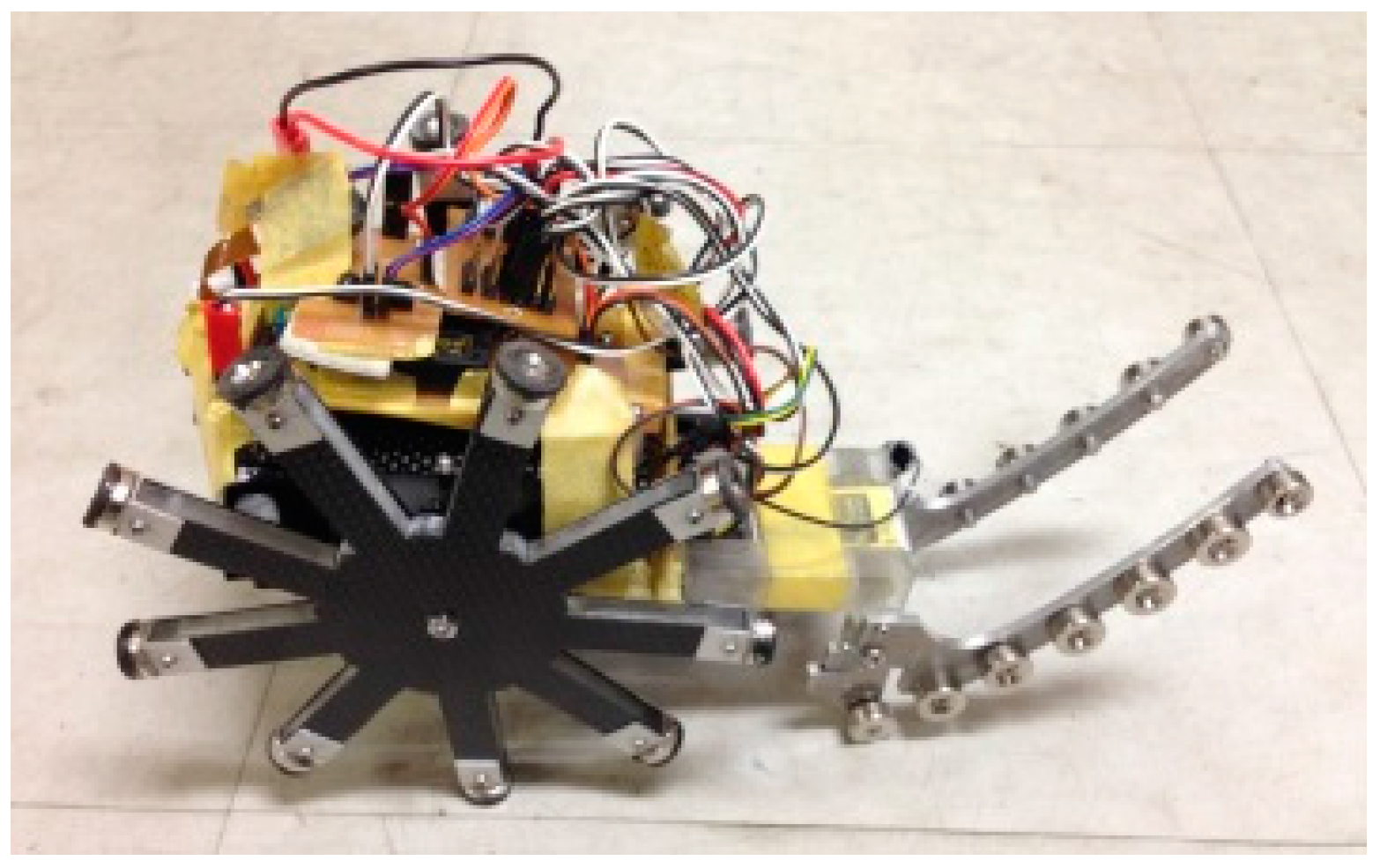
3. Structure of the BIREM 3rd Robot
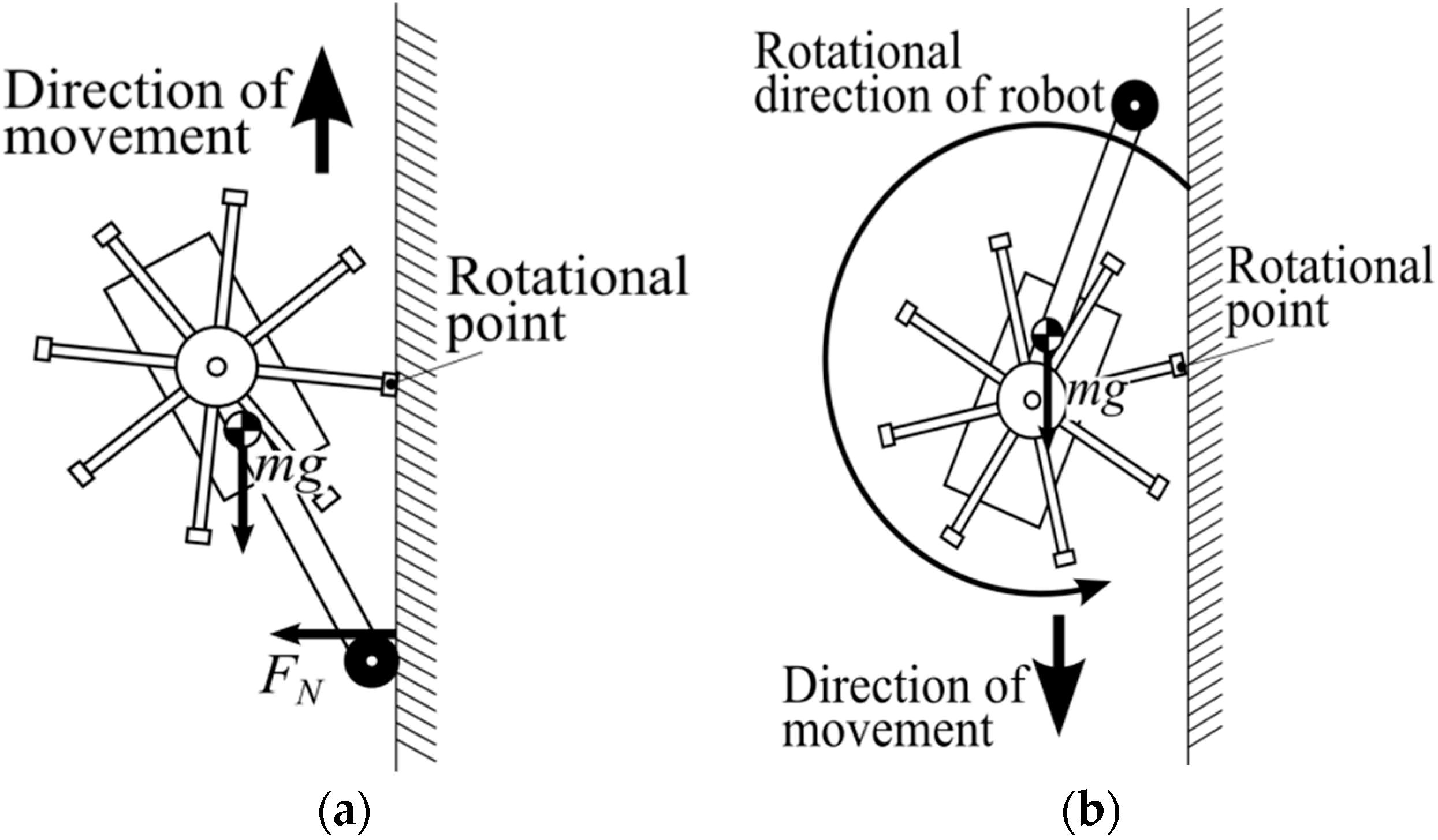
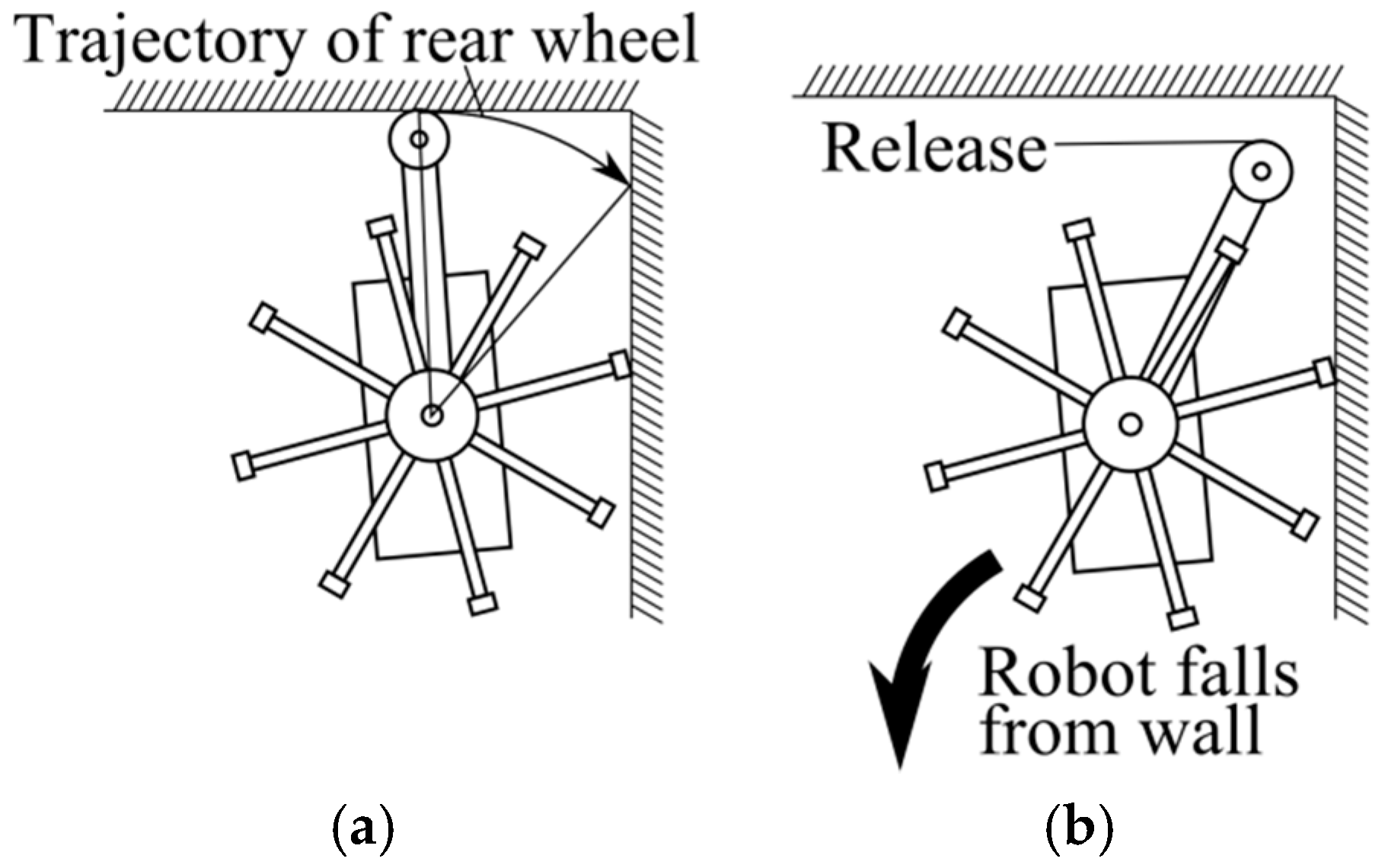
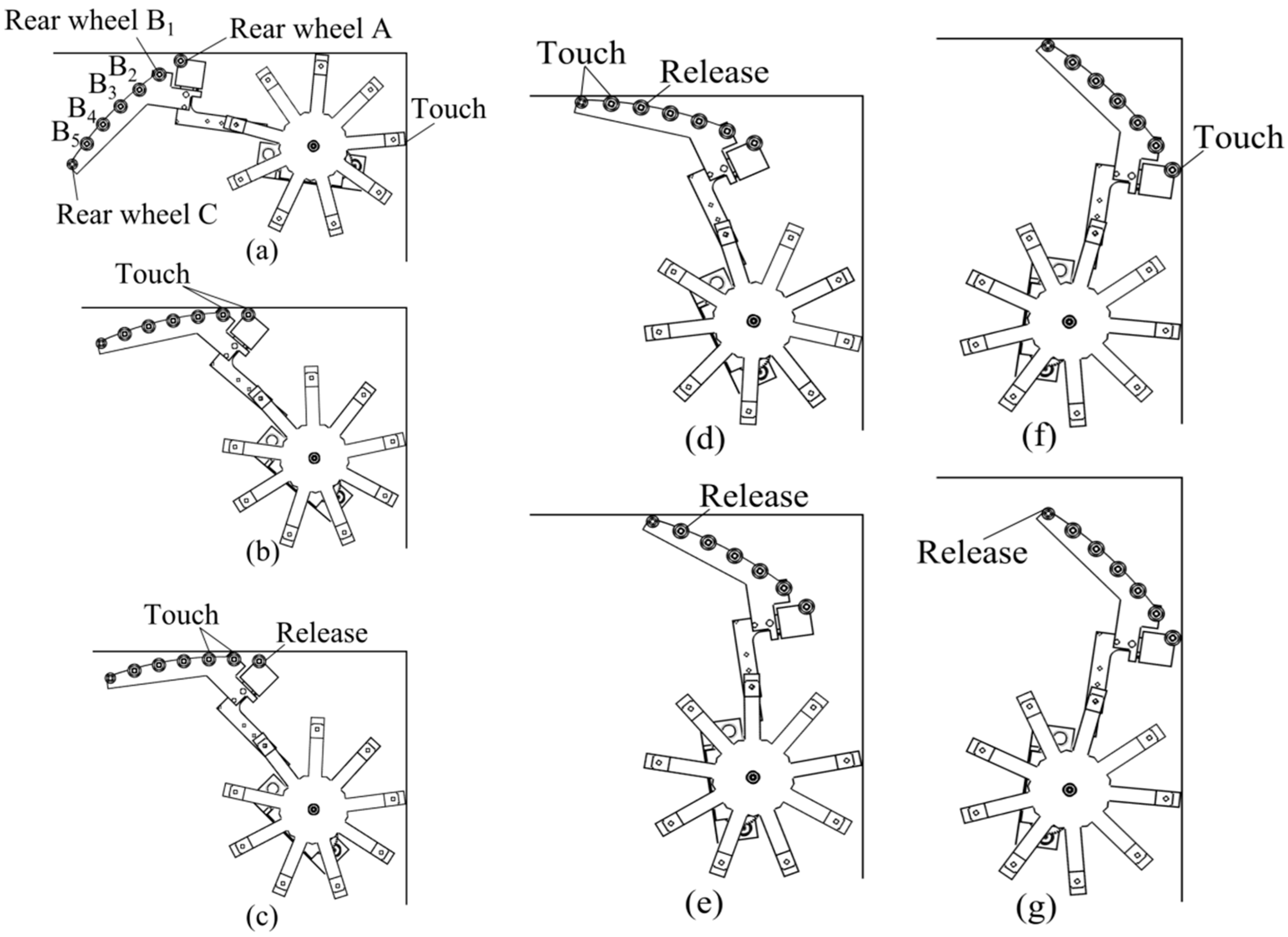
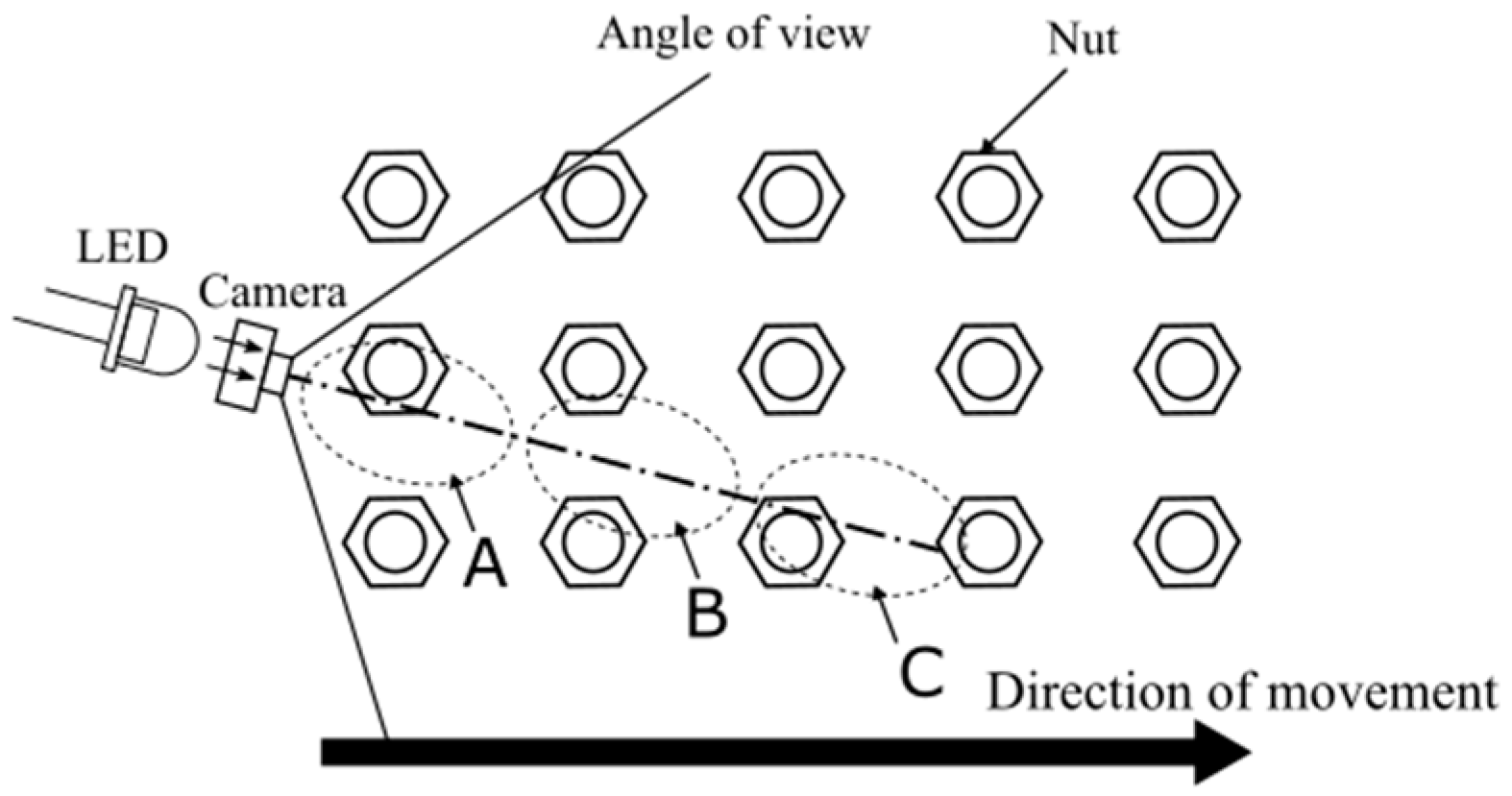
3.1. How to Run through the Splicing Part
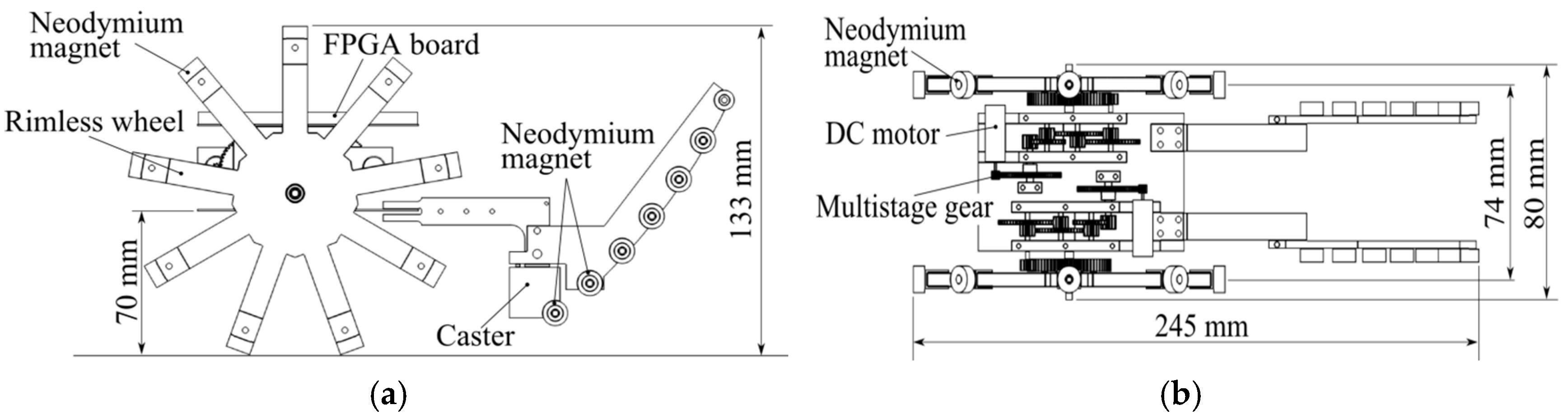
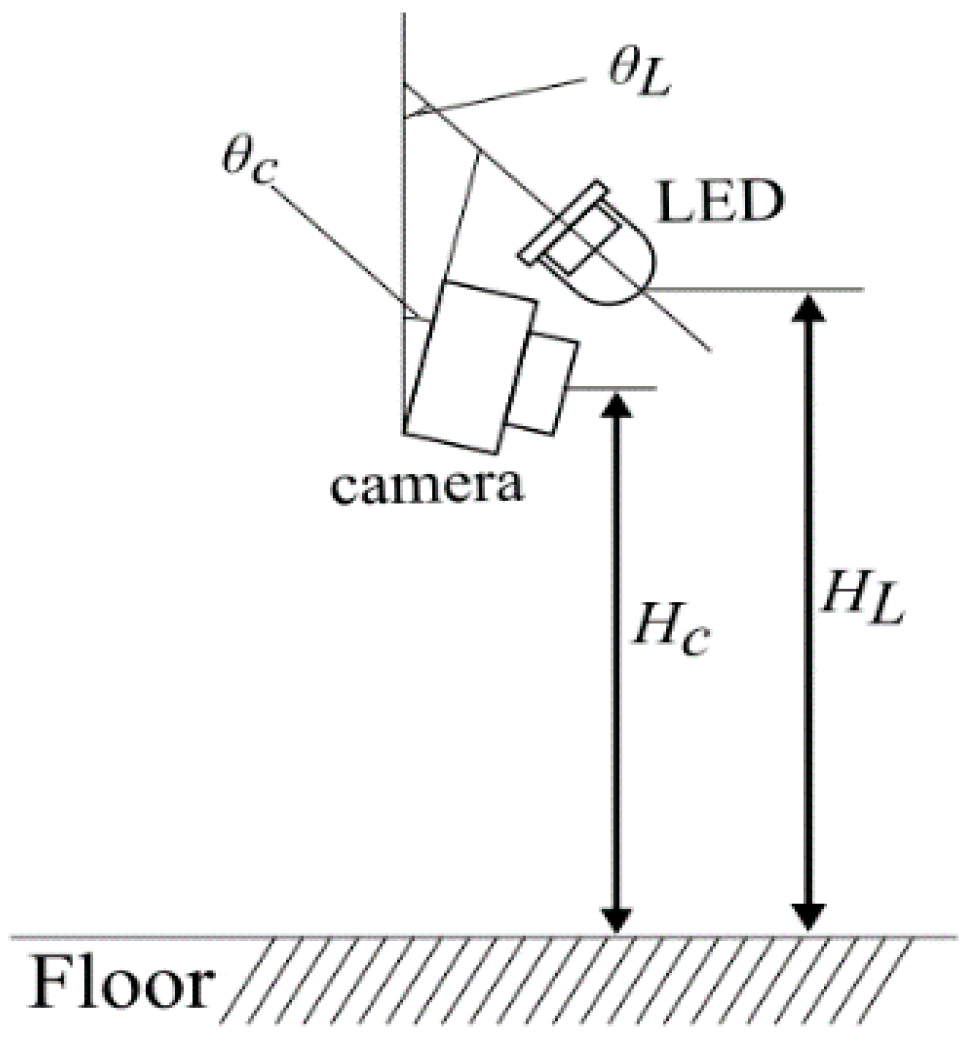
3.2. Configuration of BIREM 3rd
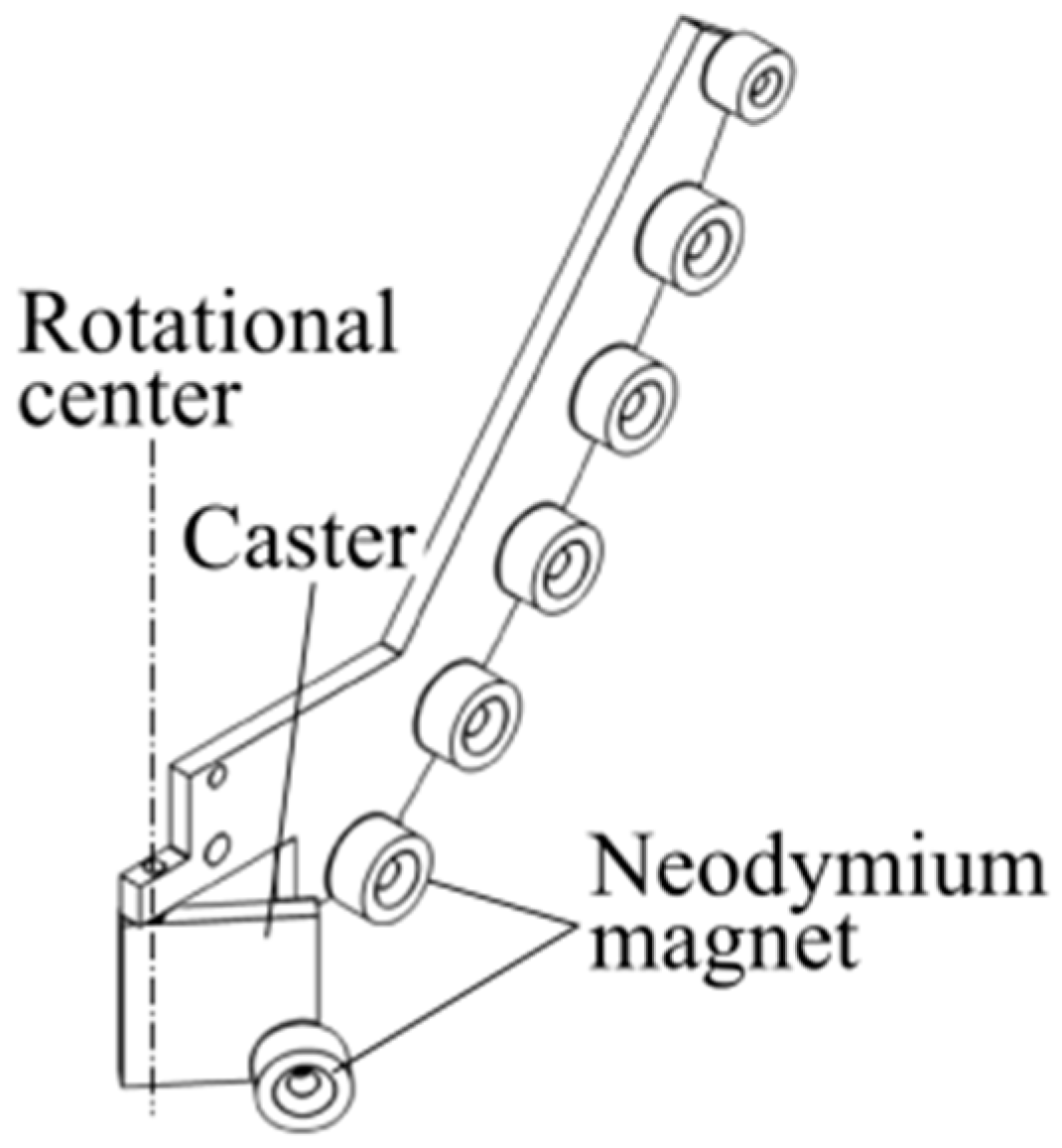
3.3. Enhancing Running Ability and Turning Ability
4. Results and Discussion for Experiments with BIREM 3rd
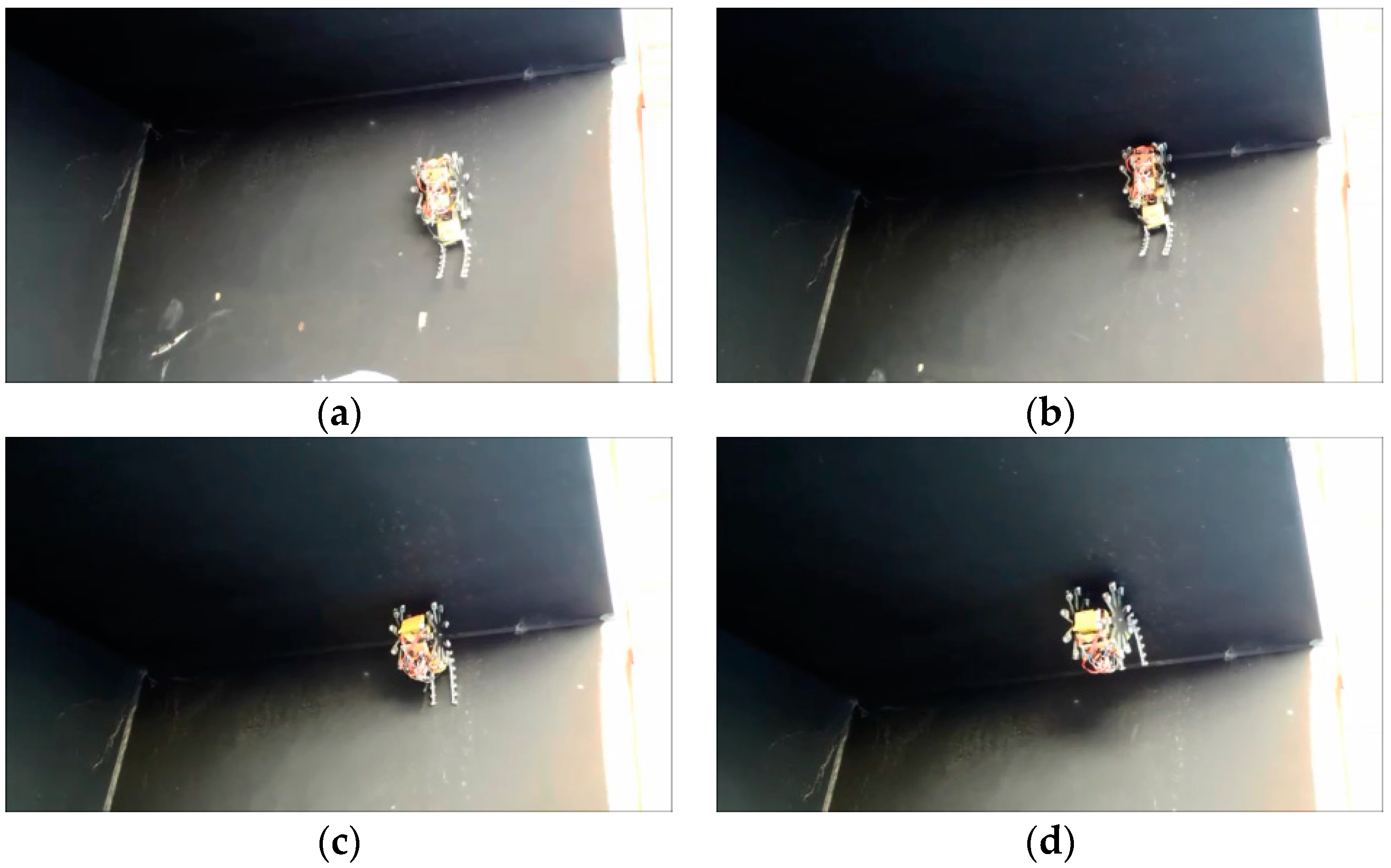
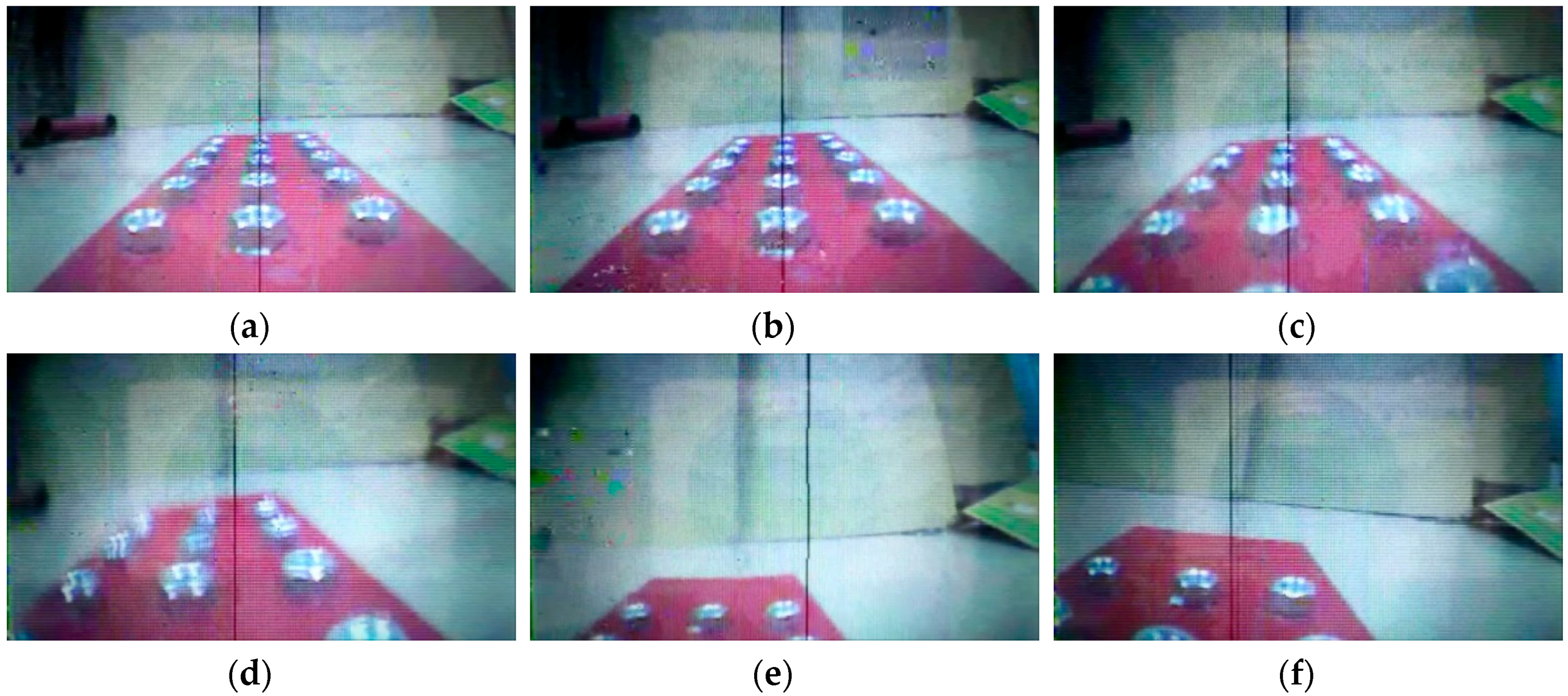
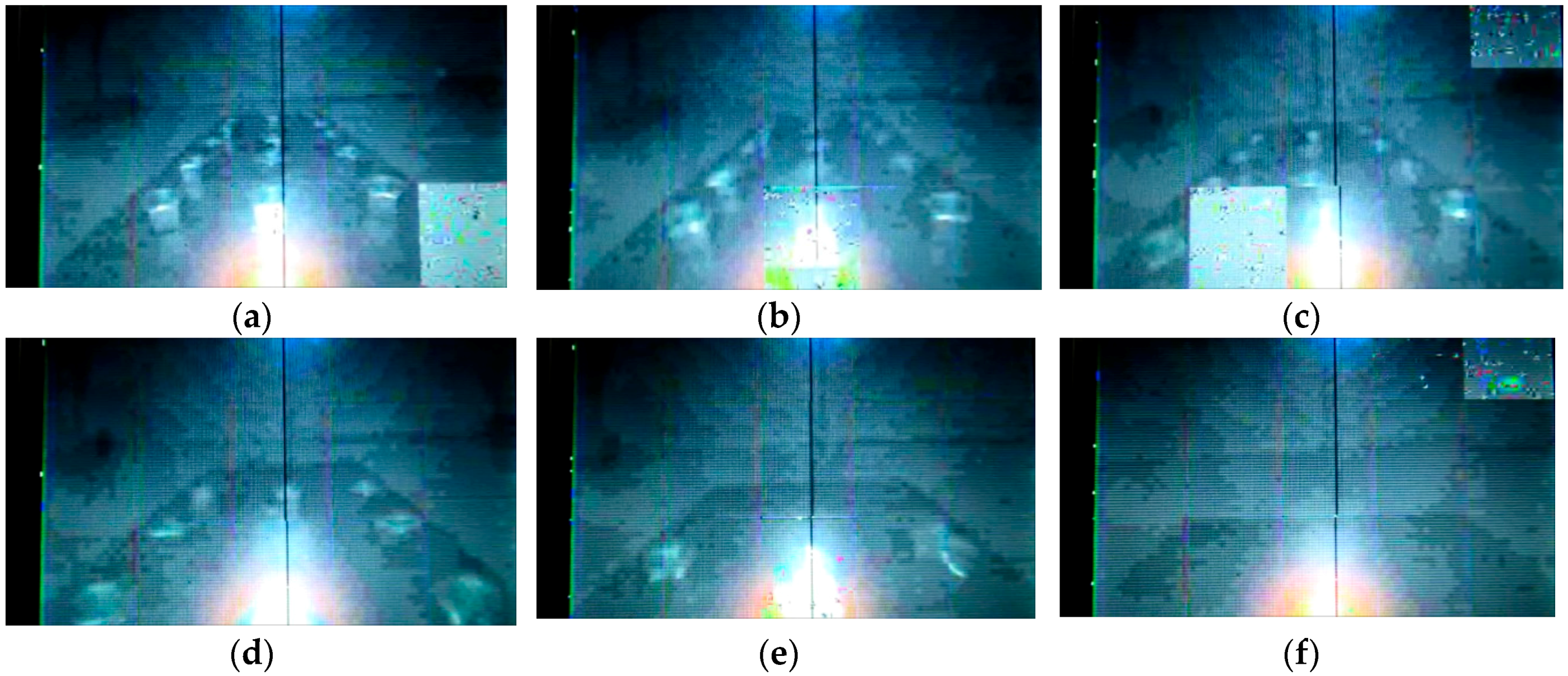
4.1. Experimental Results of Running on a Right-Angle Path in a Bridge Box Girder
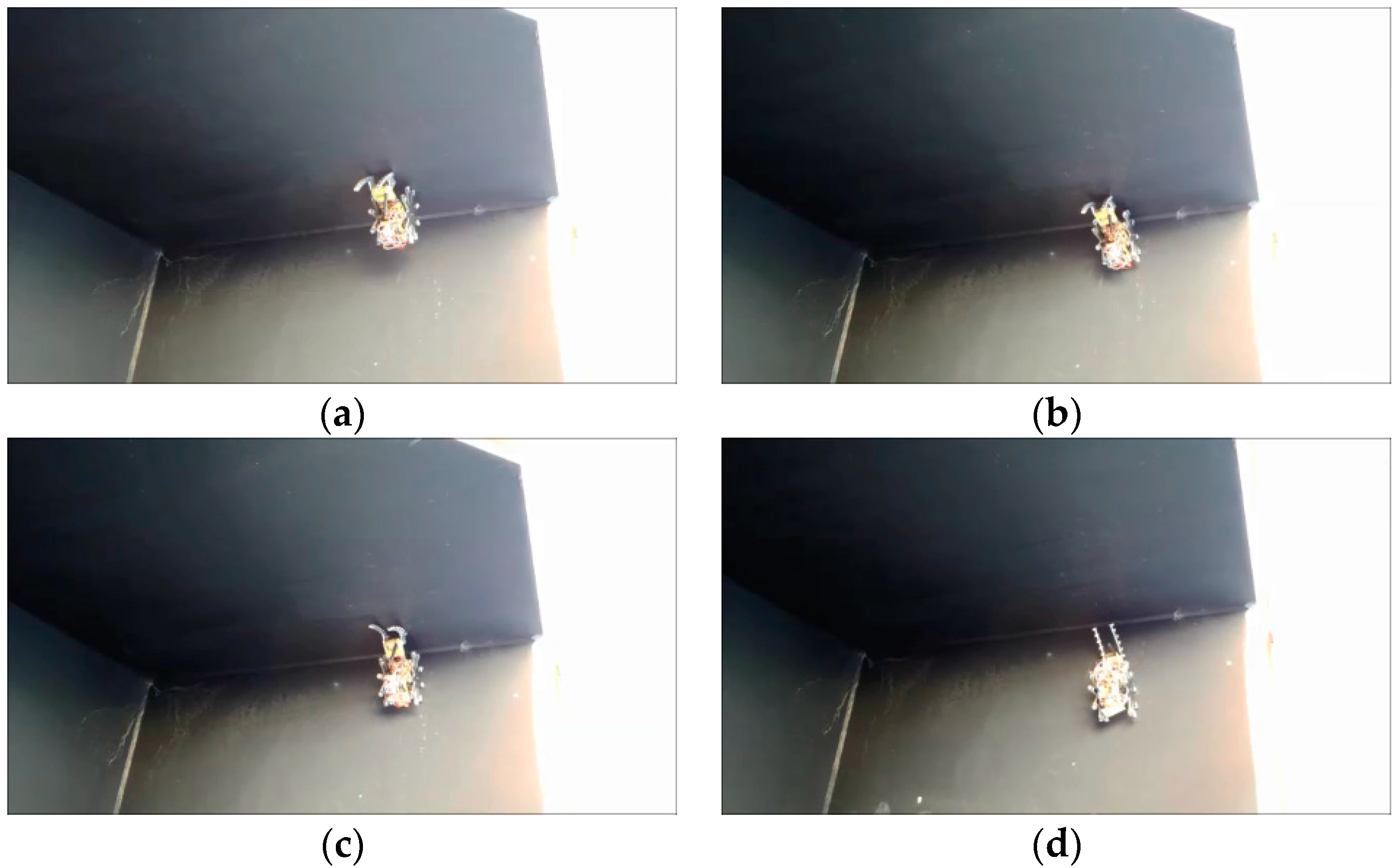
4.2. Experimental Results of Running on the Splicing Part
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Watanabe, E.; Furuta, H.; Yamaguchi, T.; Kano, M. On longevity and monitoring technologies of bridges: A survey study by the Japanese Society of Steel Construction. Struct. Infrastruct. Eng. 2014, 10, 471–491. [Google Scholar] [CrossRef]
- White Paper on Land, Infrastructure, Transport and Tourism in Japan, 2015. Available online: http://www.mlit.go.jp/en/statistics/white-paper-mlit-2015.html (accessed on 20 July 2017).
- Nonami, K. Drone Technology, Cutting-Edge Drone Business, and Future Prospects. J. Rob. Mechatronics 2016, 28, 262–272. [Google Scholar] [CrossRef]
- Higashi, Y.; Akahori, S.; Masuda, A.; Takeuchi, K. Verification of an EPM system for an Aerial Inspection Robot and Close-up Image Shooting. Adv. Exp. Mech. 2016, 1, 179–184. [Google Scholar]
- Tokura, Y.; Toba, K.; Takada, Y. Practical Applications of HORNET to Inspect Walls of Structures. J. Rob. Mechatronics 2016, 28, 320–327. [Google Scholar] [CrossRef]
- Mazumdar, A.; Asada, H.H. An Underactuated, Magnetic-Foot Robot for Steel Bridge Inspection. J. Mech. Rob. 2010. [Google Scholar] [CrossRef]
- iXs Research Corporation, SAUT ROBOT, Product introduction (in Japanese). Available online: http://www.ixs.co.jp/products/robot/saut-robot-j.html (accessed on 20 July 2017).
- Zhu, D.; Guo, J.; Cho, C.; Wang, Y.; Lee, K.M. Wireless mobile sensor network for the system identification of a space frame bridge. IEEE ASME Trans. Mechatron 2012, 17, 499–507. [Google Scholar] [CrossRef]
- Wang, R.; Kawamura, Y. An automated Sensing System for steel bridge inspection using GMR sensor array and magnetic wheels of climbing robot. J. Sensors 2016. [Google Scholar] [CrossRef]
- Takada, Y.; Kirimoto, K.; Tajiri, T.; Kawai, T. Development of a bridge inspection robot working in three-dimensional. Trans. Jpn. Soc. Mech. Eng. 2013, 79, 3135–3146. [Google Scholar] [CrossRef]
- Imajo, N.; Takada, Y.; Kashinoki, M. Development and evaluation of compact robot imitating a hermit crab for inspecting the outer surface of pipes. J. Rob. 2015. [Google Scholar] [CrossRef] [PubMed]
- Chapter 7: Connections. In Japan Road Association; Maruzen Co. Ltd.: Tokyo, Japan, 2012; pp. 127–152. Available online: http://www.road.or.jp/books/pdf/07-002.pdf (assessed on 20 July 2017).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Specifications |
|---|---|
| Length | 245 mm |
| Width | 80 mm |
| Total height | 133 mm |
| Vehicle height | 70 mm |
| Wheel track | 74 mm |
| Weight | 411 gf |
| Controller | FPGA (Spartan-6) |
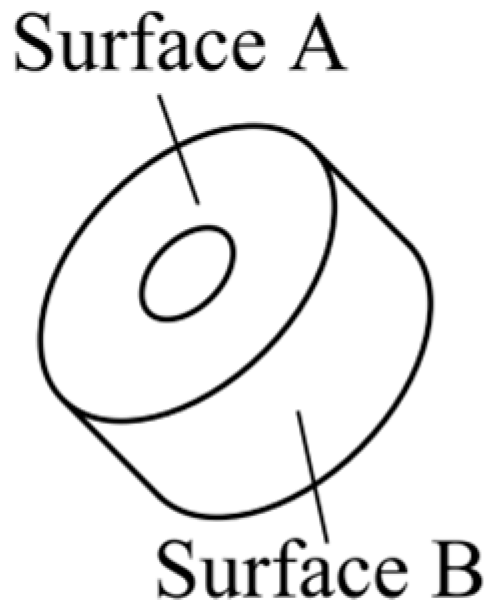
| Size of the Magnet | 10-mm Diameter Magnet | |
| Contact surface | Surface A | Surface B |
| Surface of the steel box in the laboratory | 1960 gf | 535 gf |
| Surface of the box girder bridge | 1180 gf | 405 gf |
| Size of the Magnet | 12-mm Diameter Magnet | |
| Contact surface | Surface A | Surface B |
| Surface of the steel box in the laboratory | 2900 gf | 820 gf |
| Surface of the box girder bridge | 1850 gf | 620 gf |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takada, Y.; Ito, S.; Imajo, N. Development of a Bridge Inspection Robot Capable of Traveling on Splicing Parts. Inventions 2017, 2, 22. https://doi.org/10.3390/inventions2030022
Takada Y, Ito S, Imajo N. Development of a Bridge Inspection Robot Capable of Traveling on Splicing Parts. Inventions. 2017; 2(3):22. https://doi.org/10.3390/inventions2030022
Chicago/Turabian StyleTakada, Yogo, Satoshi Ito, and Naoto Imajo. 2017. "Development of a Bridge Inspection Robot Capable of Traveling on Splicing Parts" Inventions 2, no. 3: 22. https://doi.org/10.3390/inventions2030022
APA StyleTakada, Y., Ito, S., & Imajo, N. (2017). Development of a Bridge Inspection Robot Capable of Traveling on Splicing Parts. Inventions, 2(3), 22. https://doi.org/10.3390/inventions2030022