1. Introduction
For Aristotle, “Natural Philosophy” (NP) is a branch of Philosophy which examines the phenomena of the natural world; it includes fields that are now classified as physics, biology, and other ‘natural’ sciences. This division of Science into specific disciplines came later. In particular Physics only took its more restrictive modern sense around 1690, with Galileo, Descartes, and Newton.
Today, the aim is to search for connected knowledge able to re-unify sciences and revive NP, for instance in Complexity Theory and Network Science. For Truesdell [
1]: “The first aim of modern natural philosophy is to describe and study natural phenomena by the
most fit mathematical concepts. The most fit need not be the most modern, but <…> we neither seek nor avoid the most abstract mathematics”.
1.1. Mathematical Models in Physics
Among the usual mathematical models in Physics figure dynamic systems (generally employing differential or difference equations), nonlinearity and chaotic dynamics. They are based on the concept of phase space which was developed in the late 19th century by Ludwig Boltzman, Henri Poincaré, and Willard Gibbs. In dynamical system theory, a phase space is a space in which all possible states of a system are represented, with each possible state corresponding to one unique point in the phase space. For mechanical systems, the phase space usually consists of all possible values of position and momentum variables. In quantum physics, it is a little more difficult to describe this space, but there exists an analog.
The phase space model cannot lead to an integral model for complex dynamic living systems. By
living system, we always mean evolutionary multi-level, multi-agent and multi-temporality self-organized systems, such as biological, social, or cognitive systems. The reason is that these systems are submitted to frequent environmental constraints which would necessitate incessant changes of phase space; thus we cannot find a unique phase space in which to proceed (cf. Longo et al. [
2]). In these cases, the phase space model can only be applied locally and on a short duration; for instance, in multi-agent systems, the dynamic of a co-regulator agent is computable on its specific landscape, during one of its steps (
Section 3.2); the global dynamic, which results from complex interactions between these local dynamics, is generally non-computable and unpredictable on the long term.
The problem is to develop new methods for studying the system in its integrality, for instance Plamen Simeonov [
3] has proposed an
Integral Biomathics for studying biological systems. In complexity theory, a complex system is represented as a network (or directed graph) having for objects the components of the system and for arrows the links between them through which they can interact.
1.2. Composed Objects: The Part–Whole Problem
Reductionism dates back to the 1600s when Aristotle’s Laws of Thought were used by Descartes and Newton to explain their theories. The general idea is to deduce the properties of a ‘whole’ complex system from those of (some of) its better known ‘parts’, for instance some of its subsystems justifiable of computational methods. It is related to the philosophical part–whole problem: to determine the new set of integrative properties that acquires the single ‘composed’ object obtained by aggregation of a pattern of interacting objects when these objects are joined together. The problem was already raised by Aristotle in his Metaphysics [
4]: “What is composed of something so that the whole be one is similar not to a pure juxtaposition, but to the syllabus. The syllabus is not the same as its component letters: ba is not identical to b and to a, it is still something else”. This sentence has led to different non-equivalent interpretations:
“The whole is nothing more than the sum of its parts”;
“The whole is something else than the sum of its parts”;
“The whole is more than the sum of its parts”.
These interpretations lead to different philosophical positions, from ‘pure’ reductionism, to emergentism (and even holism when conjugated with “the whole must of necessity be prior to the parts”).
In
Section 2, we will show how the categorical concept of
colimit of a diagram (or pattern) gives a precise mathematical translation of the part–whole correspondence that makes clear the above distinctions. In fact, it allows for a formal definition of a composed object as an aggregate of a pattern of interacting objects, which is at the basis of the concept of a multi-level system.
1.3. Compositional Hierarchy
A multi-level system, such as a living system, can be modeled by a
compositional hierarchy (in the sense of Salthe [
5], that is a system, in which the components are distributed in different complexity levels (from 0 to m), with the following property: a component C of a higher complexity level is a composed object acting as a ‘whole’ aggregating a pattern of interacting components of lower levels.
This part-whole correspondence can be one-to-one or not, in which case C is the aggregate of several structurally non-isomorphic lower-level patterns P
i. In this case, we say that C is
multifaceted and that the P
i’s represent its lower-level
multiple realization (compare with Kim [
6]). Over time, new multifaceted components of increasing complexity may ‘emerge’, generally due to non-linear phenomena or chaotic dynamics.
A compositional hierarchy is a
holarchy, meaning that a component of level other than 0 acts as a
holon (Koestler [
7]): it is a ‘whole’ with respect to (each of) its lower-level decompositions, and a ‘part’ for a higher component to which it is connected. The different levels are intertwined, with intra-level interactions from lower to higher levels, and vice-versa. A component can simultaneously receive information from objects of any level, and in response send messages to any level, as long as the necessary material (e.g., energy) constraints are satisfied. For instance, an enterprise has such a hierarchical organization with several levels: individuals, departments, from small producing units to higher directorial levels. The links between different components represent channels through which they exchange information and can collaborate to achieve a common goal.
A pure methodological reductionism to the lowest level 0 (e.g., molecular level for biological systems) would mean that each object of a higher level is the simple aggregate of a pattern of interacting objects of level 0. A main result (
Section 2.4) asserts that such ‘pure’ reductionism is not possible if there are multifaceted objects, in which case we have an “
emergentist reductionism” (in the sense of Mario Bunge [
8]). This result is obtained in the frame of the following methodology.
1.4. The MES Methodology for Reviving NP
Reviving NP requires to design pervasive models adjustable to different kinds of systems, from physical systems to multi-level living systems, able to adapt to changing conditions through learning and to account for the development of emergent properties over time. At this end, in the sequel, we propose the mathematical methodology named
Memory Evolutive Systems (MES), introduced by Ehresmann and Vanbremeersch [
9,
10], to study evolutionary multi-level, self-organized complex systems such as living systems, with the following properties:
they have a tangled hierarchy of components which vary over time, with possible loss of components as well as emergence of more and more complex components and processes;
through learning, they develop a robust but flexible memory allowing for better adaptation;
the global dynamic is modulated by the interplay between the local dynamics of a net of specialized agents, called co-regulators, each operating stepwise with the help of the memory.
MES is a kind of info-computational model (in the sense of G. Dodig-Crnkovic [
11]) which interweaves two mathematical domains: a Category Theory incorporating time to model the organization of the system and its changes over time; and hybrid Dynamic Systems to study the local dynamics of its co-regulators. While the local dynamics of the co-regulators might be computable via usual physical models, the global dynamic is generally not computable and even unpredictable on the long term (cf.
Section 3).
MES have developed applications in different domains: (i) Biology (Integral Biomathics [
12], Immune system, Aging theory [
10]); (ii) Cognition (integrative model MENS of the neuro-cognitive system, up to the emergence of higher cognitive processes [
13], and even neuro-phenomenology [
14]); (iii) Collective Intelligence and Design Studies (D-MES [
15]); (iv) Anticipation and Future Studies (FL-MES [
16]).
For a complete theory of MES, we refer to the book [
10] and, for more recent applications, to papers on the site [
17].
1.5. Outline of the Article
In
Section 2, we briefly recall the categorical notions of a colimit (Kan [
18]) and of a hierarchical category [
9] and discuss their philosophical implications with respect to the part–whole problem and to the categorical modeling of a compositional hierarchy. Defining the notion of a multifaceted object in a hierarchical category, we prove that the existence of such components is at the basis of emergent properties. The Reduction Theorem asserts that the absence of multifaceted objects is necessary for pure reductionism. A main construction is the
Complexification Process (CP) that explains how
complex links are at the basis of the emergence of objects of higher complexity orders (
Emergence Theorem).
In
Section 3, we recall the local and global dynamics of a MES. In particular, we explain how iterated CPs may lead to unpredictable emergent behaviors. We deduce from these results that MES propose an ‘emergentist reductionism’ [
8] model for living systems, and so could be a valid candidate to ‘revive’ Natural Philosophy.
Section 4 discusses how the meaning of emergence depends on the observer and the context, and studies the relations of emergence with anticipation and creativity.
2. Categories for Modeling Multi-Level Systems
Category theory is a domain of Mathematics introduced by Eilenberg and Mac Lane [
19] in 1945. It is a ‘relational’ theory, in which the structure of objects is deduced from the morphisms which connect them. It has a foundational role in mathematics by analyzing the main operations of the “working mathematician” [
20], thus reflecting some of the prototypical operations that man does for making sense of his world: distinguishing objects and their interrelations; synthesis of complex objects from more elementary ones (colimit operation) leading to the emergence of more complex objects and processes (complexification process); optimization processes (as solutions of ‘universal problems’ [
20]); classification of objects into invariance classes (formation of concepts).
2.1. Categories for Modeling Complex Systems
Networks of any nature are often represented by (oriented multi-)graphs. Such a graph is a set of objects and a set of directed arrows between them. A category is a graph on which there is given an associative and unitary composition law which associates to each path (=sequel of adjacent arrows) of the graph a unique arrow, called its composite, connecting its extremities; an arrow of the category is also called a morphism.
Examples of categories:
Small categories: A monoid is a category with a unique object. A group is a category with a unique object and in which each morphism has an inverse. A category K with at most one morphism between two objects ‘is’ (associated to) a p(artially)o(rdered)set (K0, <), where K0 is the set of objects of K and where the order < on it is defined by: k < k’ if and only if there is a morphism from k to k’ in K.
Categories of paths: To a graph G is associated the category of paths of G, denoted by L(G): the objects are the vertices of G, a morphism from x to x’ is a path from x to x’ and the composition of paths is given by concatenation.
Large categories: Sets denotes the category having for objects the (small) sets and for morphisms from A to B the maps from A to B; the composition is the usual composition of maps. Similarly we define categories of structured sets, for instance the category of groups, with homomorphisms of groups as morphisms; the category Top of topological spaces, with continuous maps as morphisms. Cat denotes the category having for objects the (small) categories H and for morphisms the functors between them, where a functor F from H to H’ is a map which associates to an object A of H an object F(A) of H’ and to a morphism f: A → B of H a morphism F(f): F(A) → F’(B) of H’, and which preserves the identities and the composition.
In applications to evolutionary systems whose components vary over time (for instance in MES), the configuration of the system at a given time t will be modeled by a category H. Its objects model the (state at t of the) components of the system which exist at t; its morphisms model their interactions, via channels through which they can exchange information of any nature. More precisely, if C is an object, the morphisms arriving at C transmit information, constraints, or commands sent to C, those issued from C transmit information allowing for actions of C toward other objects. Thus if f: A → C is a morphism (or arrow) from A to C, we think of A as an active transmitter of information and C as a receiver.
The composition law defines an equivalence relation on the set of paths of the category H: two paths are equivalent if they have the same composite; then the category H is the quotient category of the category L(H) of paths of H by this equivalence. In concrete applications, objects and morphisms can represent elements which have specific ‘physical’ properties (measured by real observables, e.g., activity at t, strength, propagation delay,…); and paths which have the same composite correspond to paths which are functionally equivalent. A diagram (or pattern) P in the category H defines a sub-graph of H. The diagram is commutative if, for each pair of objects Pi and Pj, the paths in P from Pi to Pj have the same composite. In category theory, commutative diagrams lead to a kind of calculus in which they play the same role as equations in algebra.
2.2. Interpreting the Part–Whole Problem via the Categorical Notion of Colimit
To interpret a sentence such as: “the whole is nothing more than the sum of its parts”, we need to specify what we mean by ‘parts’, by ‘sum’ and by ‘whole’. In a general network, there is no natural way to do this because we cannot compare parallel paths. The situation is different in a category where the composition law allows distinguishing paths which have the same composite, meaning, in concrete applications, that they are ‘functionally equivalent’.
2.2.1. The Categorical Notion of Sum
The sum of a family of objects can be modeled using an important categorical operation, namely the coproduct operation, which is a particular case of the colimit operation introduced by Kan in 1958 [
18]). Formally:
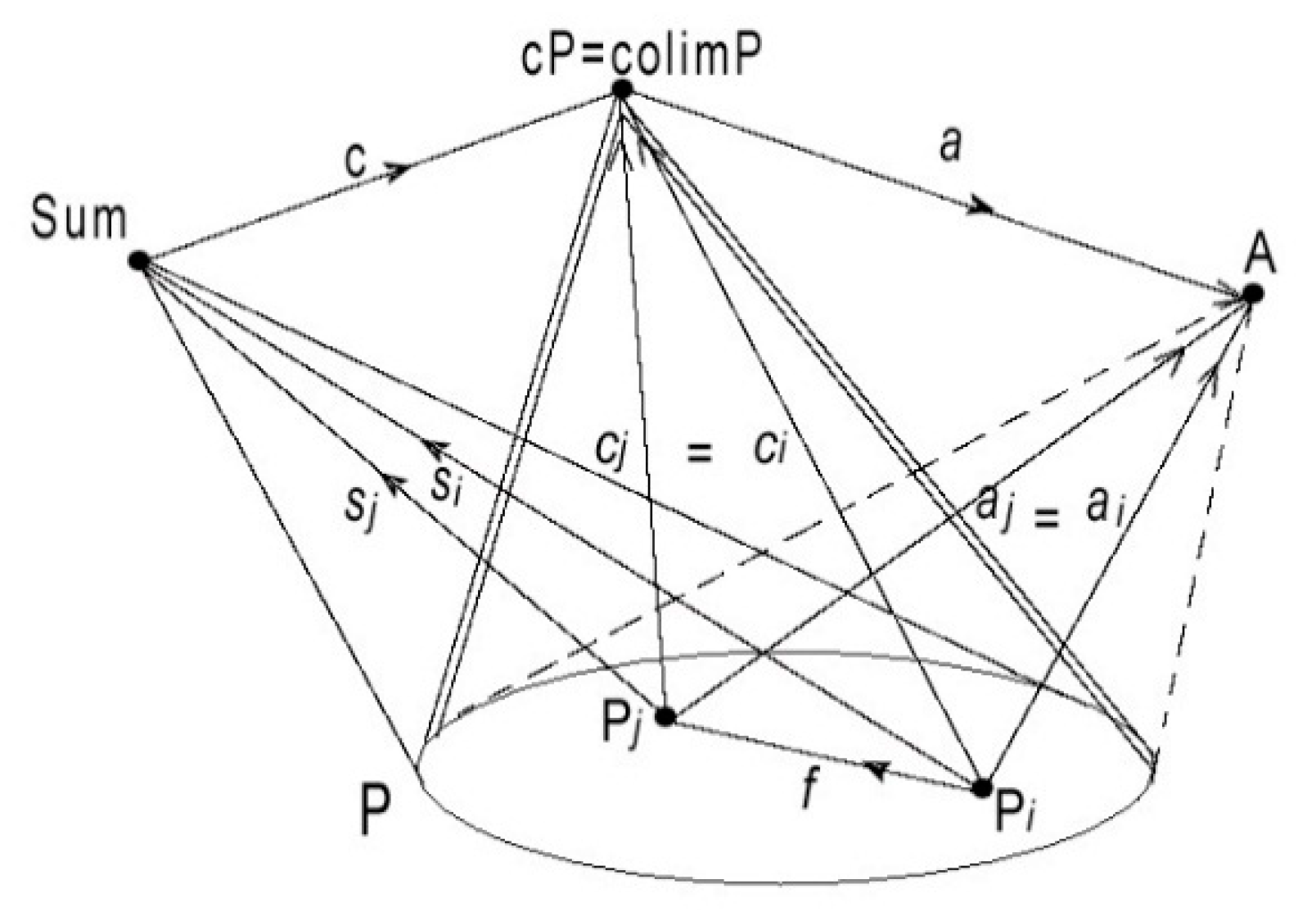
Definition 1. In a category H, the coproduct (or sum) of a family of objects Pi, if it exists, is an object S of H such that there exists a family of morphisms si: Pi → S satisfying the ‘universal’ condition:
if (ai) is a family of morphisms ai: Pi → A toward any object A, then there is a unique morphism a from S to A ‘binding’ this family, meaning that a: S → A satisfies the equations ai = sia for each i (cf. Figure 1).
(Let us note that these equations, which mean that for each i the composite s
ia is equal to a, would have no meaning in a network where composites are not defined).
With this notion, the sentence “the whole is nothing more than the sum of its parts” becomes: “The whole is modeled by the coproduct S of the family of objects Pi modeling its parts”. It corresponds to a ‘structural’ reductionism (in a non-relational context).
2.2.2. The Categorical Notion of colimit
Let us consider the sentence: “the whole is something other than the sum of its parts” which corresponds to the Aristotle’s example of the syllabus ([
4], cf.
Section 1.2): In this case, the data are not only the family of parts P
i but also ‘something else’, namely some given relations between them.
In a category H, these data are represented by a diagram (also called pattern) P whose objects represent the objects Pi and whose morphisms represent the given relations between them, so that the entire P models the parts and their organization.
To characterize the ‘whole’ associated to a pattern P, the idea is to represent it by the colimit of P in H (if it exists). For that, let us first define what is a
collective link from P to an object A; in concrete applications, it corresponds to an ‘action’ (emission of a message, constraint, command,…) performed by the pattern acting collectively (whence the name) in the respect of its organization, and which could not be realized by its objects acting separately Translated in categorical terms, a collective link from P to A in H is modeled by a
cone with basis P and vertex A, that is a family (a
i) of morphisms a
i from P
i to A such that, for each morphism f: P
i → P
j in P we have a
j = a
if (cf.
Figure 1).
Definition 2. Let P be a diagram in the category H. The colimit of P, if it exists, is an object cP such that there exists a cone (ci) from P to cP (called a colimit-cone) satisfying the ‘universal’ condition:For each cone (ai) from P to any object A there is a unique morphism a from cP to A such that we have: ai = cia for each i; this a is called the binding of the cone (ai).
For instance, if H models a chemical system, a molecule is the colimit of the pattern formed by its atoms with the chemical bonds which determine its spatial configuration. A pattern P in H may have at most one colimit cP (up to an isomorphism of H). Conversely, different non-structurally isomorphic patterns of H may have the same object C as their colimit; in this case we say that C is
multifaceted; we come back to this case in
Section 2.3.
By modeling the ‘whole’ as the colimit cP of the pattern P modeling its ‘parts’ and their organization, the sentence “the whole is something other than the sum of its parts” becomes: “the colimit of P is different from the sum of the objects of P”. In a category where there exist both a colimit cP of a pattern P and a sum S of the family of its objects, this sentence takes a precise meaning, allowing to ‘measure’ the difference between S and cP by a well-defined morphism c (Cf.
Figure 1).
Proposition 1. Let P be a pattern in a category H; if there exist both the colimit cP of P and the sum S of its family of objects, then there exists a ‘comparison’ morphism c from S to cP.
Proof. By the universal property of the sum, the family (ci) of morphisms forming the colimit-cone from P to cP binds into the comparison morphism c from S to cP. □
Thus in the relational context H, we have a
reduction of the ‘whole’ cP to the pattern P representing its parts and their organization, but not to (the sum S of) its parts. In the other way, to model the ‘whole’ as the colimit of P imparts to it an
emergent property in H, namely that any cone with basis P uniquely factors through the colimit cone; we come back to this in
Section 4.1.
2.3. Categorification of A Compositional Hierarchy
Using the preceding representation of a ‘whole’ as the colimit of the pattern of its ‘interacting parts’, and thinking of the whole as something more complex than its parts, we can model the notion of a ‘compositional
hierarchy given in
Section 1.3 as follows.
Definition 3 [
9]
. A hierarchical category is the data of a category H and a partition of the set of its objects into a finite number of levels of complexity, numbered from 0 to m, verifying the condition: Each object C of the level n+1 is the colimit of at least one pattern P of interacting objects Pi of levels less or equal to n. Then we call P a lower-level decomposition of C. A morphism of level n is a morphism between objects of level n. By definition of the colimit, it means that C admits at least one lower-level decomposition in a pattern P verifying: for any object A of H there is a one-to-one correspondence between the cones from P to A and the morphisms from C to A. Roughly, each object C of a level > 0 ‘aggregates’ at least one lower-level decomposition P, so that C alone has the same operational role that the pattern P acting collectively. It follows that, in a hierarchical category, an object C of level > 0 acts as a
holon playing as a Janus (Koestler [
7]): It is a ‘whole’ more complex than the objects of one of its lower-level decompositions P, while accounting for the constraints imposed by their interactions in P. At the same time C acts as a ‘part’ of a more complex object C’ if C is an object of a pattern admitting C’ for colimit. For instance, in the hierarchical category representing a society, a group of interacting people is ‘more complex’ than its members, but ‘less complex’ than a society to which it belongs.
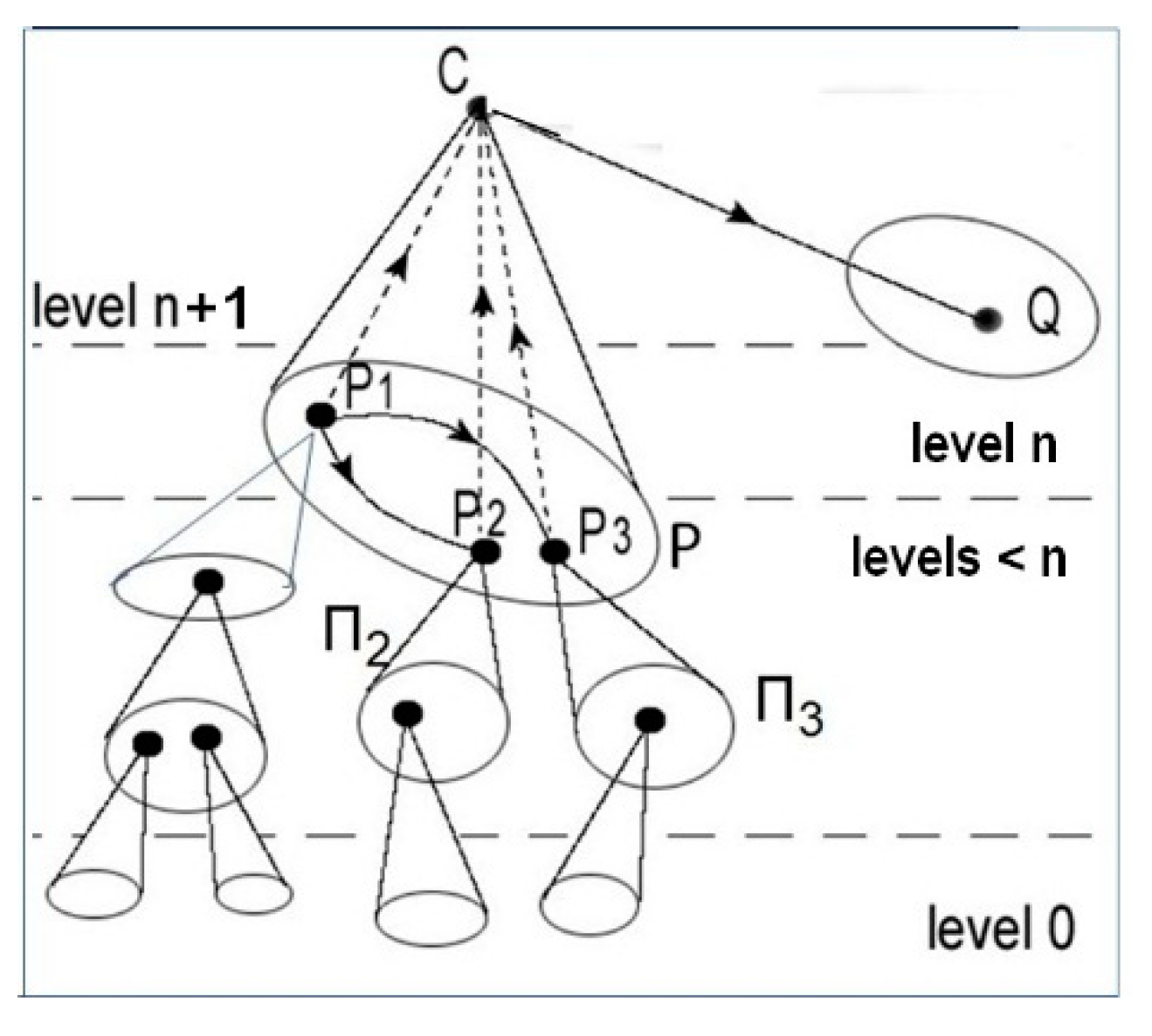
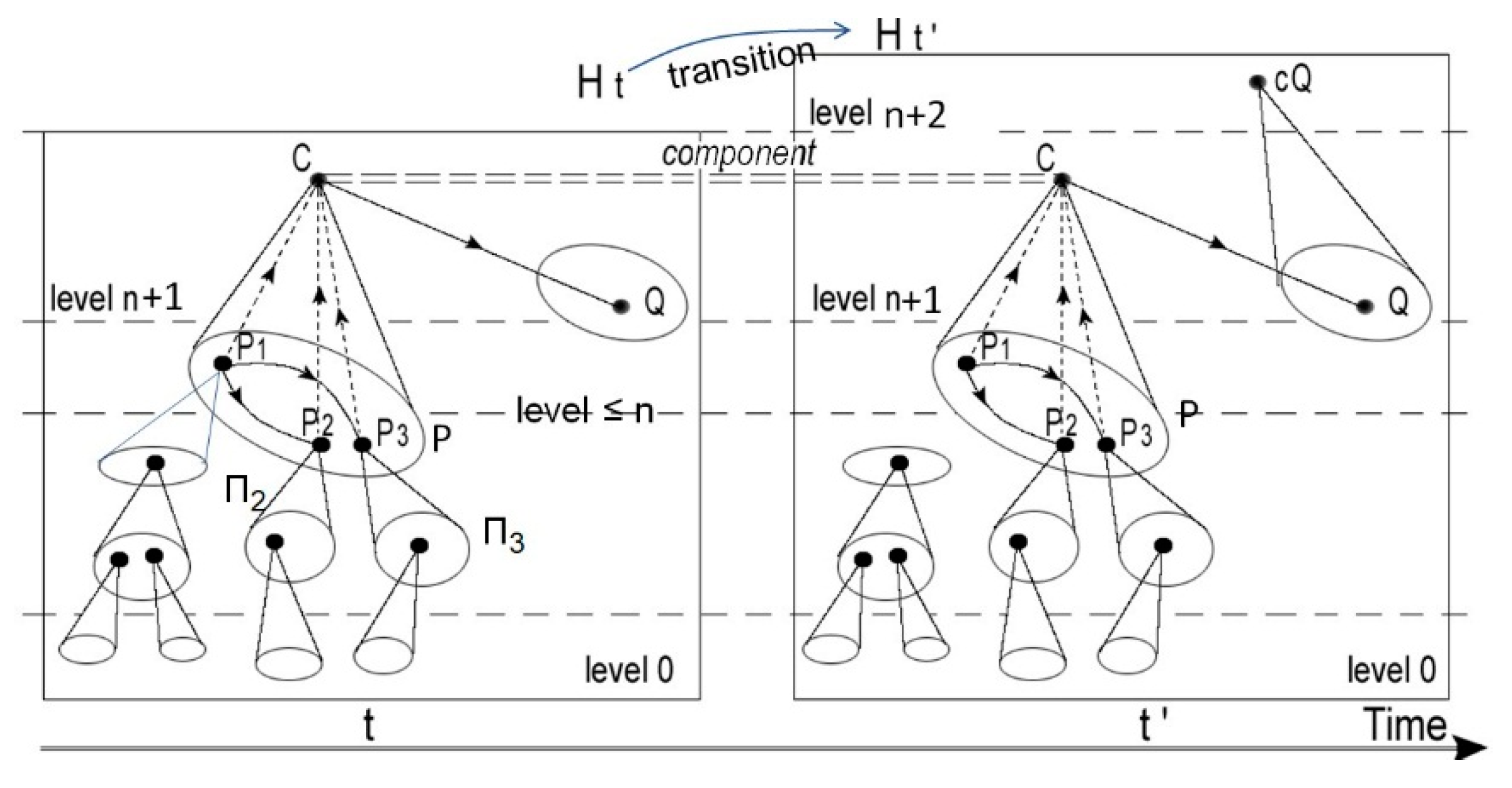
Going down the levels, we can construct at least one
ramification of C down to level 0 (cf.
Figure 2), obtained by taking a lower-level decomposition P of C, then a lower-level decomposition Π
i of each object P
i of P, and so on, down, till we reach a set of patterns of level 0 which form the
base of the ramification.
Definition 4. In a hierarchical category H, the complexity order of an object C of H is the smallest length of a ramification of C down to level 0. This order is less than or equal to the level of C.
While the complexity level of an object is specified in the definition of the hierarchical category H, its order of complexity (to be compared to the Kolmogorov–Chaitin complexity of a string of bits) is the result of a computation accounting for the whole structure of the category. For instance, if C is an object of complexity order 2, there is no pattern of level 0 of which C is the colimit (otherwise C would be of order 1), but C has a ramification (P, (Πi)) where P is a pattern of level < 2 having C as its colimit, and Πi for each object Pi of P is a pattern of level 0 with Pi as its colimit. The patterns Πi (some of which can possibly be reduced to an object of level 0) form the base of the ramification. This base is not sufficient to re-construct C from level 0 up since we need supplementary data expressing the constraints imposed by the morphisms of P.
2.4. Simple and Complex Morphisms: The Reduction Theorem
The (methodological) reductionism problem in a compositional hierarchy consists in a ‘reduction’ of the system to one of its levels (say the lowest one): can we deduce the properties of the whole system from the properties of its objects of level 0 and their relations? This problem will be analyzed in the categorical setting. Let H be a hierarchical category. We know that all its objects are connected to patterns of level 0 through the unfolding (possibly in several steps) of a ramification of C. Is there something analog for the morphisms? This problem necessitates to characterize different kinds of morphisms.
2.4.1. Morphisms between Complex Objects Deducible from Lower Levels
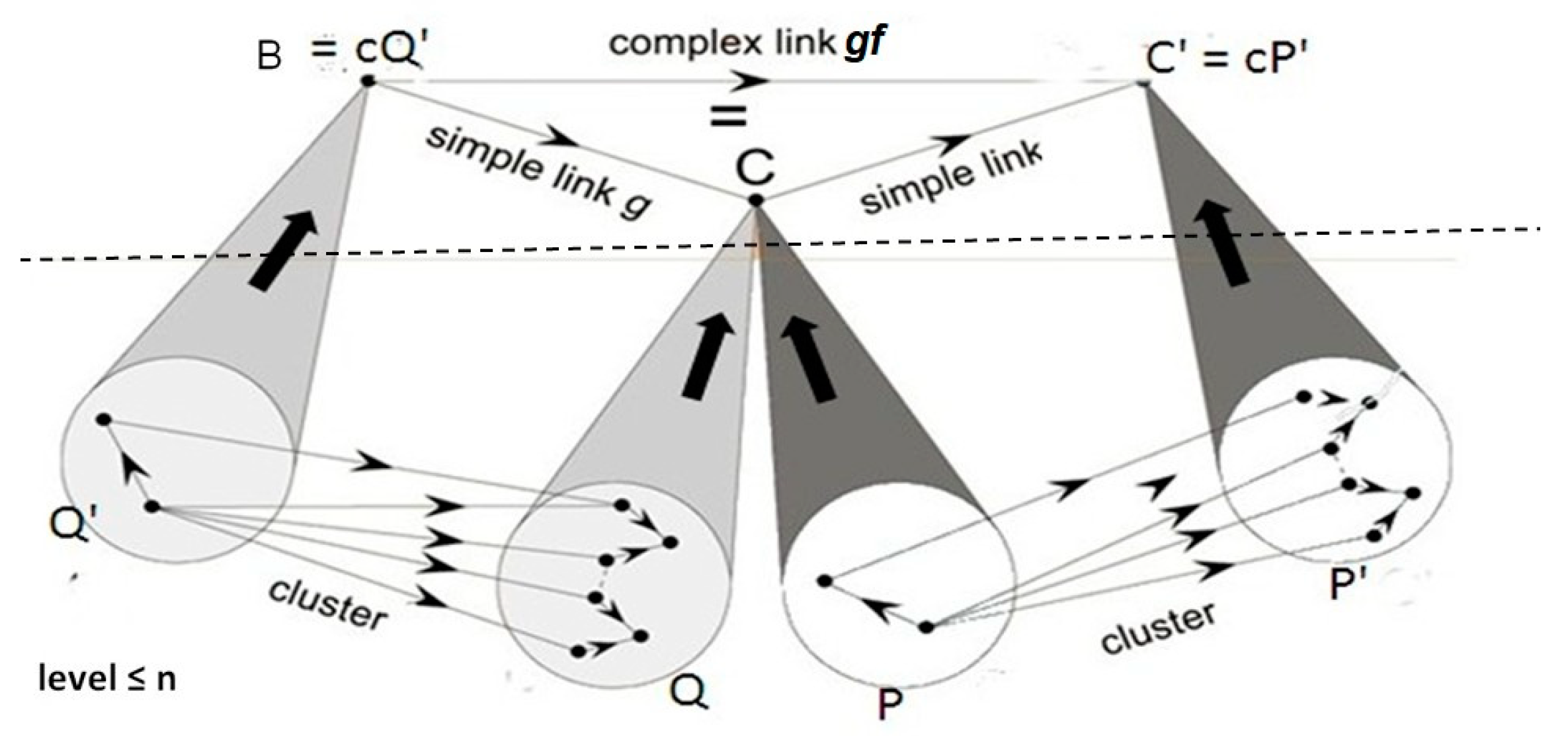
Let C be an object which is the colimit of a pattern P and C’ an object which is the colimit of a pattern P’. A
cluster from P to P’ is generated by a family of ‘individual’ morphisms connecting each object P
i of P to objects P’
j of P’, well correlated by a zig-zag of morphisms of P’ (Cf.
Figure 3).
From the universal property of the colimit, it follows that such a cluster binds into a unique morphism f from C to C’, called a (P, P’)-simple morphism or just an n-simple morphism if the objects of P and P’ are of levels ≤ n. If C and C’ are of level > n, such an n-simple morphism represents a morphism of level > n which transmits only information mediated through individual objects of the patterns, hence entirely accessible at level ≤ n; we can say that g is reducible to (the cluster) of level ≤ n. Let us note that any morphism f of level ≤ n is n-simple, as well as a morphism connecting an object of level n+1 to an object of a level ≤ n. An n-simple morphism is also n’-simple for n’ > n, A composite of n-simple morphisms binding adjacent clusters is still an n- simple morphism.
2.4.2. Multifaceted Objects
Multifaceted objects [
21]. Let C be a complex object of level n+1. Two decompositions P and Q of C are said to be structurally isomorphic if the identity of C is both a (P, Q)-simple morphism and a (Q, P)-simple morphism, meaning that there exista cluster G connecting P and Q whose binding is the identity of C and a cluster from Q to P whose binding is the identity of C. [Formally it means that G defines an isomorphism in the category Ind(H) having for objects the patterns in H and for morphisms the clusters between them.] However C may also have structurally non-isomorphic decompositions.
Definition 5. Let C be an object of level > n of the hierarchical category H. We say that C is n-multifaceted if C admits at least two structurally non-isomorphic decompositions P and Q of levels ≤ n; the passage from P to Q is called a switch. The category H is said to satisfy the Multiplicity Principle (MP) if, for each n > 0 it has n-multifaceted objects.
If C is multifaceted, it also implies that C has several structurally non-isomorphic ramifications down to level 0.
The notion of multifaceted objects (initially called multiform objects in Ehresmann and Vanbremeersch [
21]) and the MP have been introduced to formalize the concept of degeneracy of the neural code introduced by Edelman [
22], that he later generalized to all biological systems “Degeneracy, the ability of elements that are structurally different to perform the same function or yield the same output, is a ubiquitous biological property <….> a feature of complexity.” (Edelman and Gally [
23]). For instance, different codons of the same amino acid remain unrelated at the atomic level, though they give rise to the same molecule at the molecular level. Or the two possible images in an ambiguous figure gain their ‘symmetry’ only when they are interpreted in relation to the complete figure, not when they are apprehended separately. The word degeneracy reflects a
flexible redundancy of function (from bottom to top). We prefer to look from top to bottom and call this property the
Multiplicity Principle (MP) to insist on the fact that C admits
multiple realization [
6] in structurally non-isomorphic lower-level patterns. It follows that C has also multiple structurally non-isomorphic ramifications down to level 0.
2.4.3. Complex Morphisms
Let H be a hierarchical category which satisfies the Multiplicity Principle. In a category each path of morphisms must have a composite; it follows that the composite of a path of two (or more) n-simple morphisms binding non-adjacent clusters must exist; however, it is not always n-simple; in this case it is called an n-
complex morphism (Ehresmann and Vanbremeersch [
21]).
Definition 6. An n-complex morphism is a composite of n-simple morphisms which is not n-simple, so that its factors bind non-adjacent clusters. (cf. Figure 3) More precisely, let C be an n-multifaceted object. The composite of an n-simple morphism g from B to C with an n-simple morphism f from C to C’ must exist by definition of a category. However, since C is n-multifaceted, it admits structurally non-isomorphic decompositions P and Q of levels ≤ n, so that g may bind a cluster from a decomposition Q’ of B to the decomposition Q of C, while f binds a cluster from the structurally non-isomorphic decomposition P of C to a decomposition P’ of C’. In this case, the composite gf of f and g is generally an n-complex morphism (though in some cases it can be n-simple). For instance, the morphism from the group of authors of a Journal to the group of its subscribers is a complex morphism, mediated by the journal as such, considered as a multifaceted object representing both its editorial staff and its administration.
An n-complex morphism gf of level n+1 has properties which ‘emerge’ at this level. Indeed, its properties depend on the lower-level properties of the clusters that f and g bind, but also on the existence of a switch between P and Q which stands for a global property of the lower-levels, not locally recognizable at these levels, namely that P and Q have the same operational role with respect to all objects A. Thus there is no ‘reduction’ of the complex morphism to lower levels.
A composite of n-complex morphisms is generally an n-complex morphism (though it might be an n-simple morphism). In the dynamic case (
Section 3), we’ll see that complex morphisms are at the basis of the emergence of new properties corresponding to “change in the conditions of change” (Popper [
24]) which make the systems unpredictable.
2.4.4. The Reduction Problem
For a natural system, the reduction problem (under different kinds) searches to ‘reduce’ its higher-level properties to lower-level properties so that methods already developed for these lower levels could be extended; for instance reduction of a biological system to its molecular level to apply and extend methods used in physics or chemistry. As explained above, in a hierarchical category, such a reduction is only possible for a simple morphism whose properties depend on those of the cluster which it binds; but the situation is different for a complex morphism which has emergent properties at its level.
From the following theorem we deduce that a pure reductionism necessitates that the system has only simple morphisms.
Theorem 1 (Reduction Theorem [10,21]). Let H be a hierarchical category. Let C be an object of level n+1 and P a pattern of level n of which C is the colimit. If all the morphisms of P are (n−1)-simple morphisms, then there exists a pattern V of levels n−1 of which C is also the colimit. Whence the complexity order of C is strictly less than n. The result is generally not true if P has a complex morphism.
Proof. Let us explain this in the case of an object C of level 2, with a ramification (P, (Π
i)). If all the morphisms f
ij: P
i → P
j of P are simple morphisms, they bind clusters F
ij of morphisms of level 0 from Π
i to Π
j. We can define a pattern V of level 0 as follows: it contains the Π
i as sub-patterns and has also for morphisms the union of the clusters F
ij. It is proved [
10] that the pattern V has also C for its colimit. Since C is colimit of such a pattern of level 0, its complexity order is 1. □
Corollary 1 [pure (methodological) reductionism]. In a hierarchical category in which there are no complex morphisms, all the objects are of complexity order 0 or 1.
In the more general case where the category H admits multifaceted objects of complexity order strictly more than 1. we have no pure reduction to the level 0. Each object can still be related to the level 0, but the reduction cannot be done directly in one step: it necessitates the unfolding of a ramification in several steps, with emergent properties at each different step (through complex morphisms). In
Section 4.1, we describe this situation as an
‘emergentist reductionism’ [
8].
2.5. The Complexification Process. Main Theorems
The configuration of a natural system such as a living system varies over time. Its structural changes correspond to the four “standard transformations: Birth, Death, Scission, Confluence” characterized by R. Thom [
25].
If the system is modeled by a hierarchical category H, these structural changes will correspond to the realization of a procedure Pr = (A, E, U) with objectives (O) of the following kinds:
‘adding’ to H a given external graph A,
‘suppressing’ a set E of objects and morphisms of H, eventually thus dissociating a complex object by suppressing its colimit;
‘binding’ patterns P of a set U of finite patterns in H so that each P acquires a colimit cP or, if P has a colimit in H, preserves this colimit.
The realization of such a procedure Pr imposes a number of other operations. For instance to ‘bind’ a pattern P which has no colimit in H necessitates to add to the system a cone from P to a new object cP and to ‘force’ this cone to satisfy the universal condition of a colimit-cone; and this will eventually lead to the emergence of complex morphisms in the category H’ modeling the system after these modifications.
The interest of the categorical approach is that it gives an explicit construction (by recurrence) of the category H’obtained after application of the procedure Pr to H (including the above-mentioned operations). This category H’, called the
complexification of H
for Pr, provides a ‘conceptual’ anticipation of the result of Pr, and so allows a ‘virtual’ evaluation of this procedure. However, when H models a natural system, the complexification H’ might not respect some material or temporal constraints (cf.
Section 3.1.2), and anticipation raises other problems (cf.
Section 4.2).
2.5.1. The Complexification Process
The Complexification Process [
9,
10]. Given a (hierarchical) category H and a procedure Pr = (A, E, U) on H with objectives of the above kinds (O), the complexification process (CP) for Pr consists in constructing a ‘universal solution’ to the problem:
To construct a (hierarchical) category H’ and a partial functor F from H to H’ satisfying the objectives (O); in particular, it means that, for each P in U, the image of P by F will have a colimit cP in H’.
To say that F is a ‘universal solution’ to the problem means that, if there is another partial functor F’ from H to a category H” in which the objectives of Pr are realized, this F’ factors through F via a
comparison functor from H’ to H”.
Remark 1. In recent publications (e.g., [16], Chapter 3) we use the term de/complexification of H for Pr instead of ‘complexification’ to emphasize that the construction can lead both to a kind of ‘de-complexification’ by loss or dissociation of some complex objects in E, and to a real ‘complexification’ by formation of more complex objects cP becoming the colimit in H’ of patterns P which have no colimit in H. Theorem 2 (Complexification Theorem [9,10]). Let Pr = (A, E, U) be a procedure on a hierarchical category H satisfying MP. The complexification process for Pr has a universal solution F: H → H’ where H’ is a hierarchical category which is explicitly constructed (by recurrence).
2.5.2. Construction of the Complexification
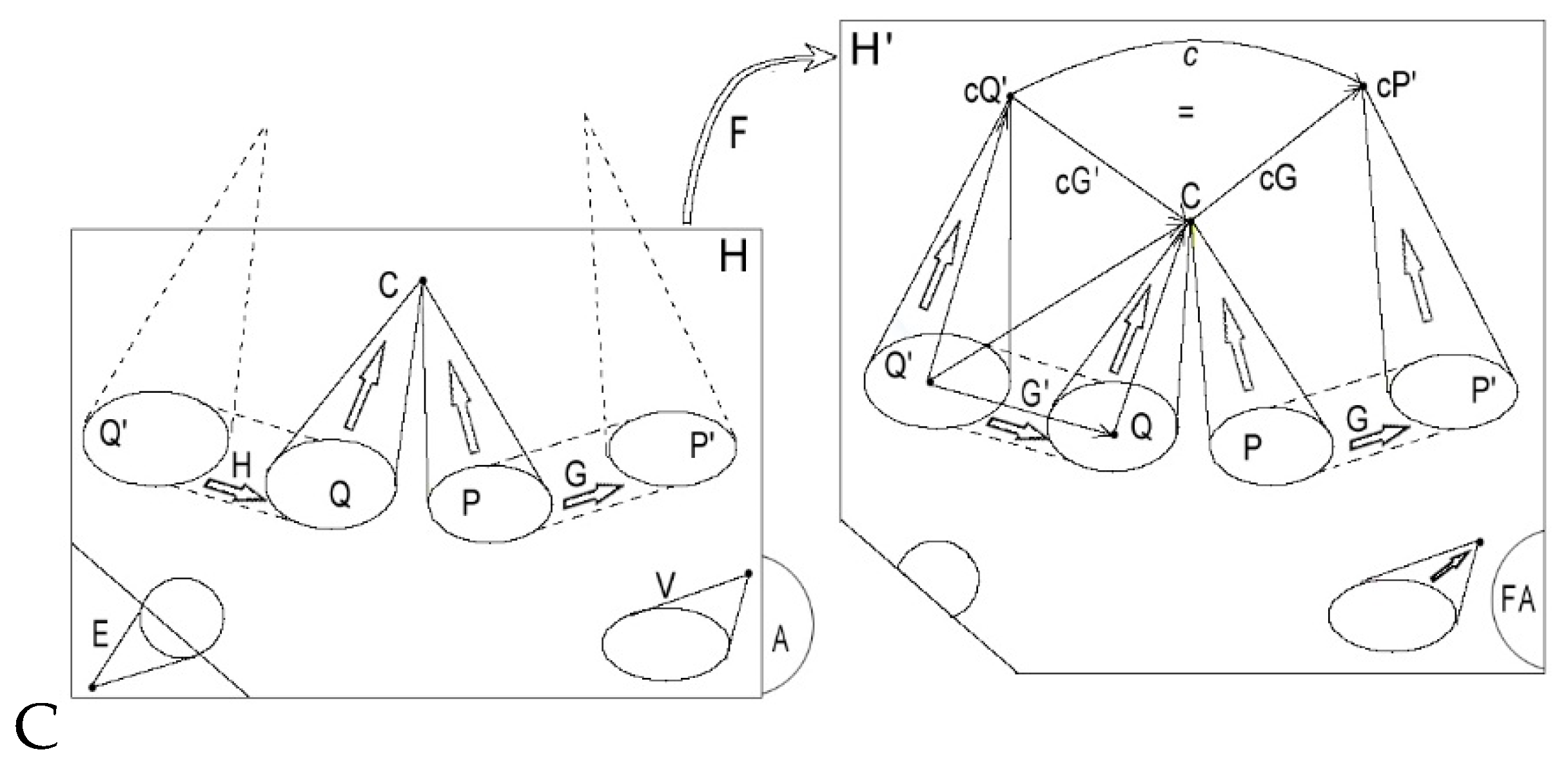
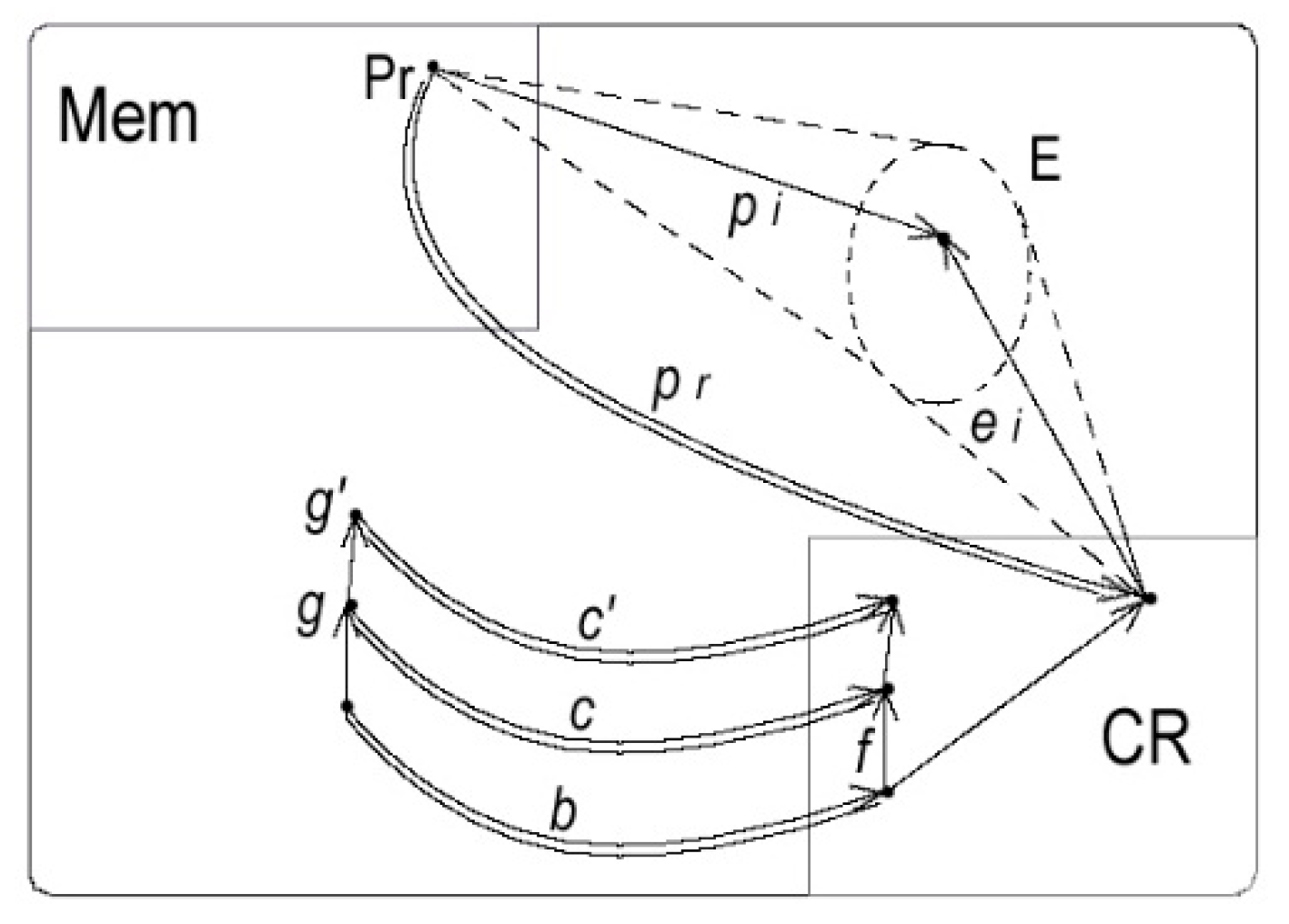
Construction of the Complexification (cf.
Figure 4). For an explicit construction of the complexification H’, we refer to ([
10], Chapter 4). Let us just indicate the following points:
The partial functor F from H to H’ is defined on the greatest sub-category of H not meeting E.
The objects of H’ are: the vertices of A, the (image by F of the) objects of H not in E and, for each pattern P in U, a new object cP which becomes the colimit of F(P) in H’. This cP is selected as follows: (i) if P in U has already a colimit C in H, we take for cP the image of C by F; (ii) If two patterns P and Q in U have the same functional role in H, we take cP = cQ, so that, if P and Q are structurally non-isomorphic, cP will be a multifaceted object in H’.
The morphisms of H’ are the arrows of A, the (images by F of the) morphisms not in E and new morphisms which are constructed by recurrence to ‘force’ cP to become the colimit of F(P) in H’ for each P in U: At each step of the recurrence, for each P in U we add morphisms from cP to B to bind cones from P to an object B, then we add composites of all the so obtained morphisms; this operation can lead to the emergence of complex morphisms. Then, repetition of such a step on the category so obtained, and so on.
If H is hierarchical, H’ is also hierarchical: the level of a ‘preserved’ object is the same as in H; the level of an emerging object cP is n+1 if P is in levels ≤ n; if P has a complex morphism, the
complexity order of cP is more than that of the objects of P (Reduction Theorem,
Section 2.4). In particular the complexification process may add a new highest-level m+1 to the hierarchy. It can also add new morphisms between objects in the image of F, and even complex morphisms (the image of F is not a full subcategory of H’).
2.5.3. Main Theorems
From the construction of the complexification, we deduce the theorems.
Theorem 3 (Emergence Theorem [10]). Let Pr = (A, E, U) be a procedure on a hierarchical category H satisfying MP. The CP for Pr may lead to the emergence of complex morphisms; in particular, if some pattern P in U has a complex morphism, the emerging object cP is of a higher complexity order than (the objects of) P. A sequence of CPs may lead to the emergence of multifaceted objects of increasing complexity orders.
Theorem 4 (Iterated complexification Theorem [10]). Let Pr = (A, E, U) be a procedure on a hierarchical category H and let Pr’ = (A’, E’, U’) be a procedure on the complexification H’ of H for Pr. If some patterns in U’ have a complex morphism, then there is no procedure Pr” on H such that the complexification H” of H’ for Pr’ be the complexification of H for Pr’.
In
Section 4, we will draw the consequences of these theorems in terms of emergence, creativity, anticipation, and unpredictability. Roughly, the formation of a complex morphism can be interpreted as a “change in the conditions of change” (in Popper’s sense [
24]), that makes the long term result unpredictable.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





