
Gust Response and Alleviation of Avian-Inspired In-Plane Folding Wings


Abstract
1. Introduction
2. Structural Design and Prototype Manufacturing
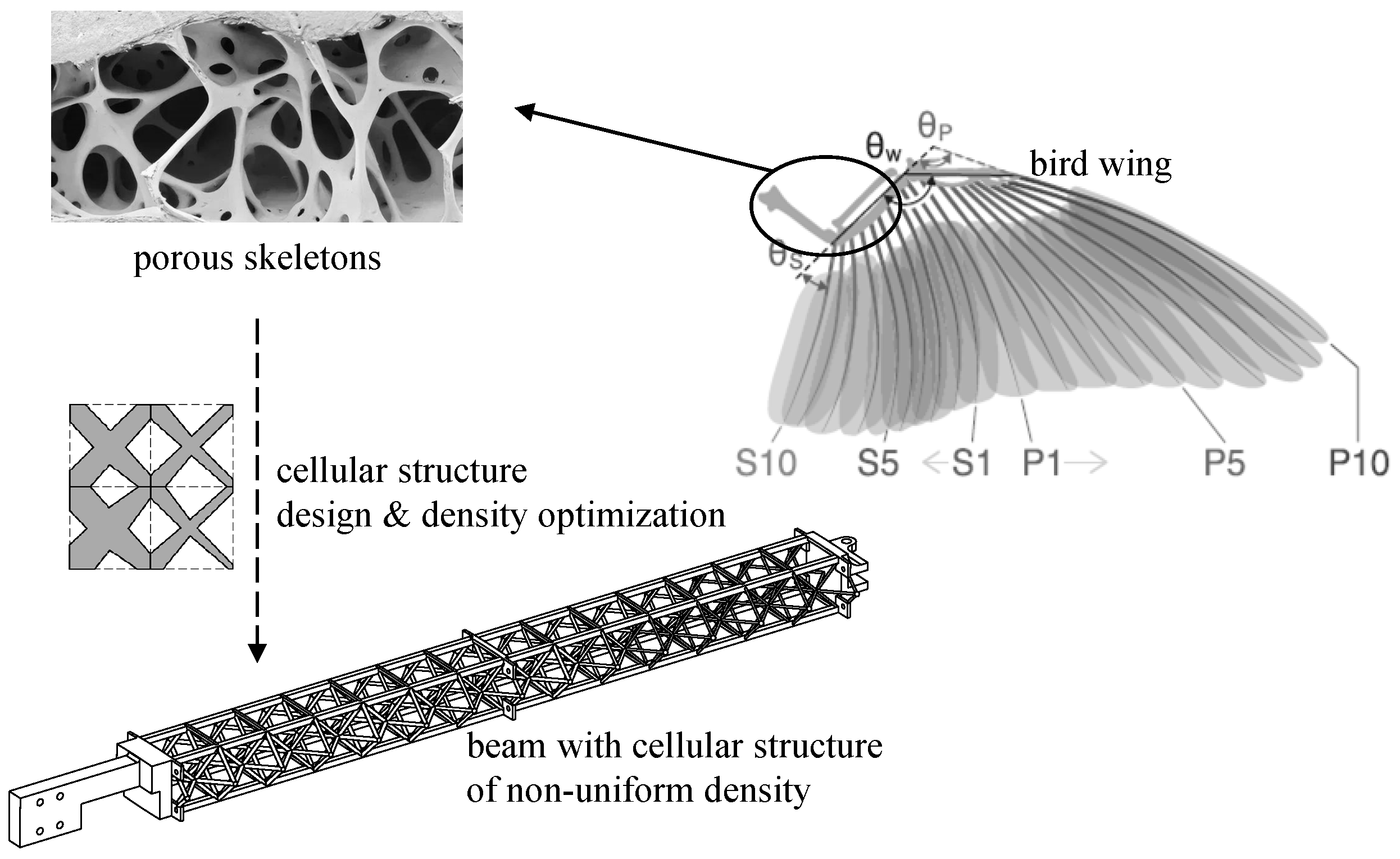
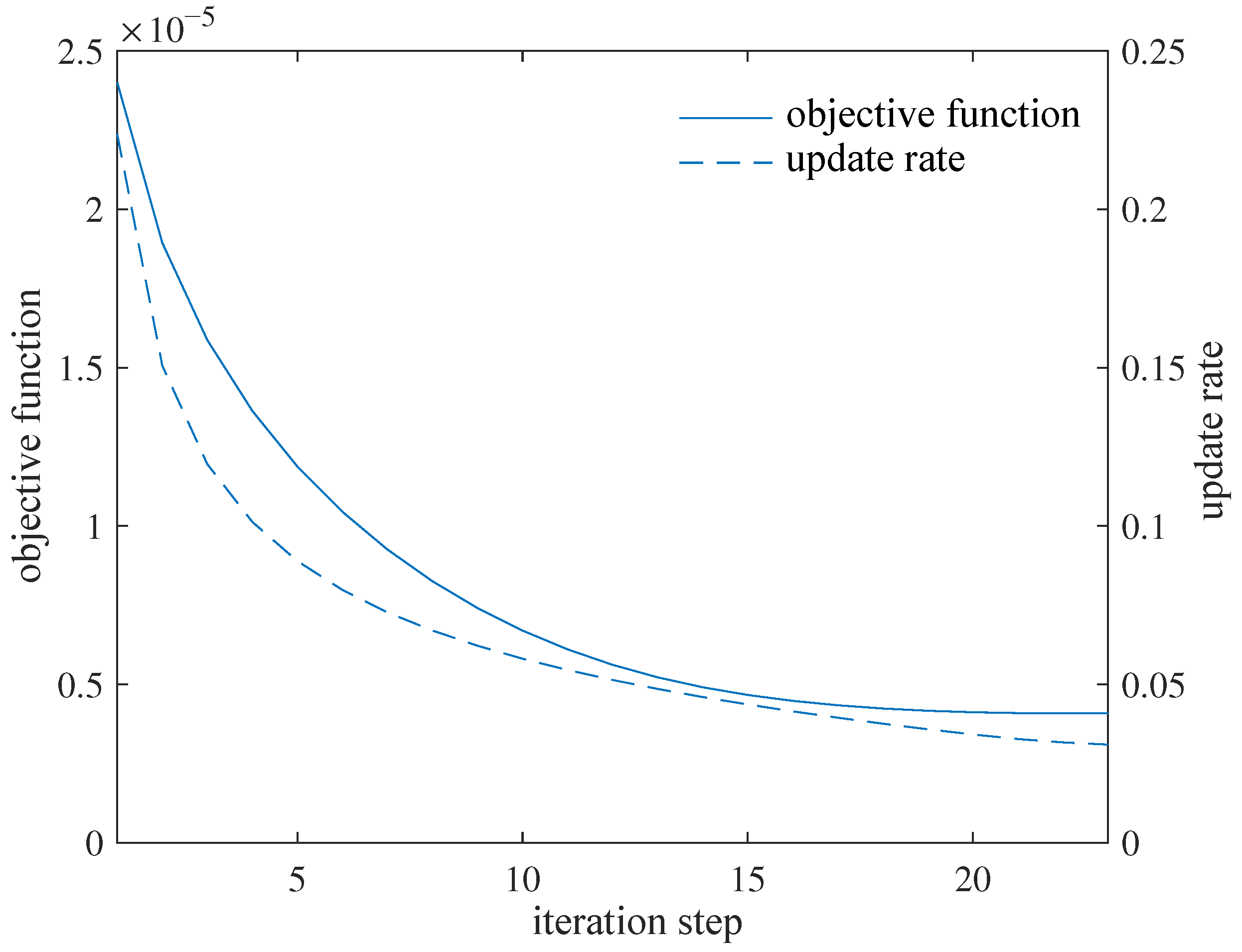
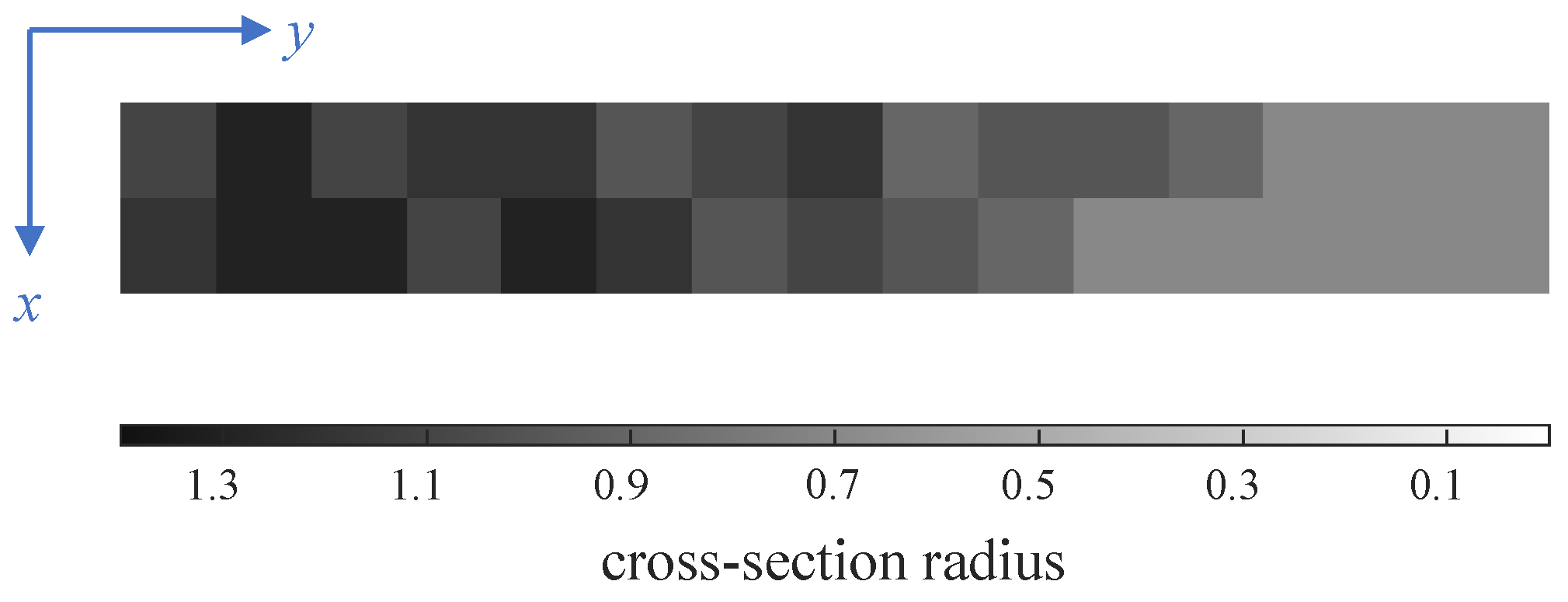
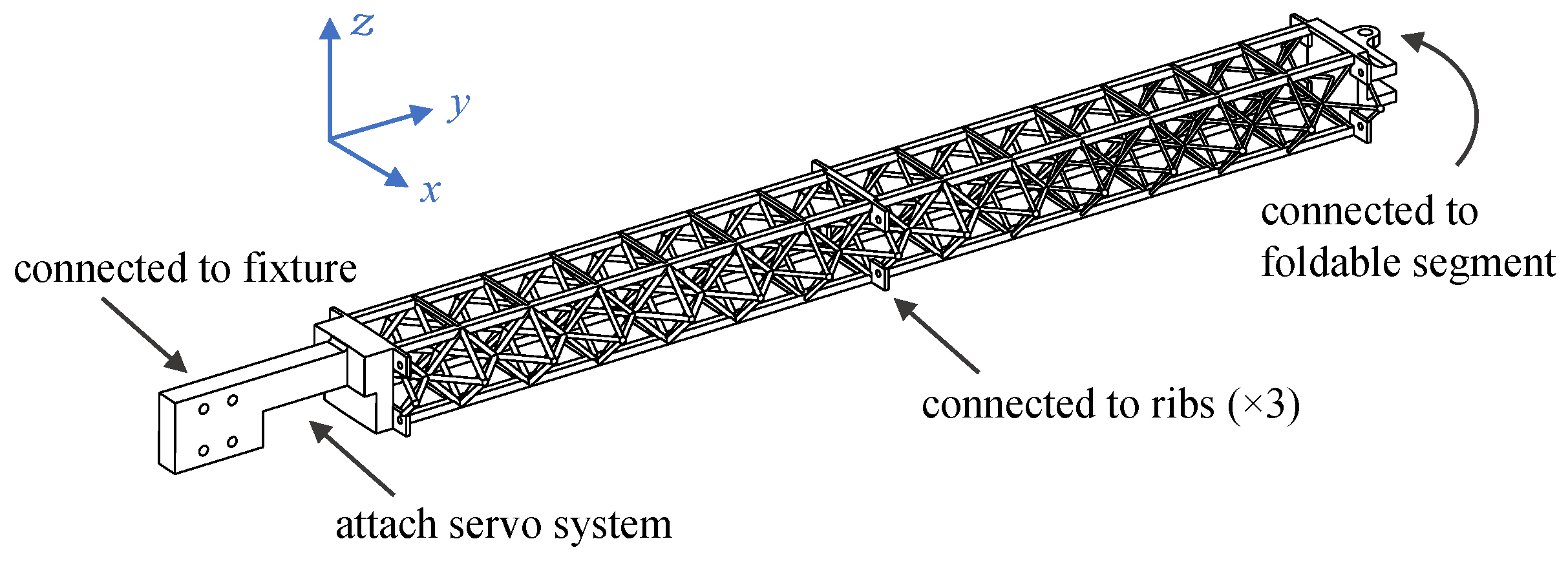
2.1. Beam with Cellular Structure of Non-Uniform Density
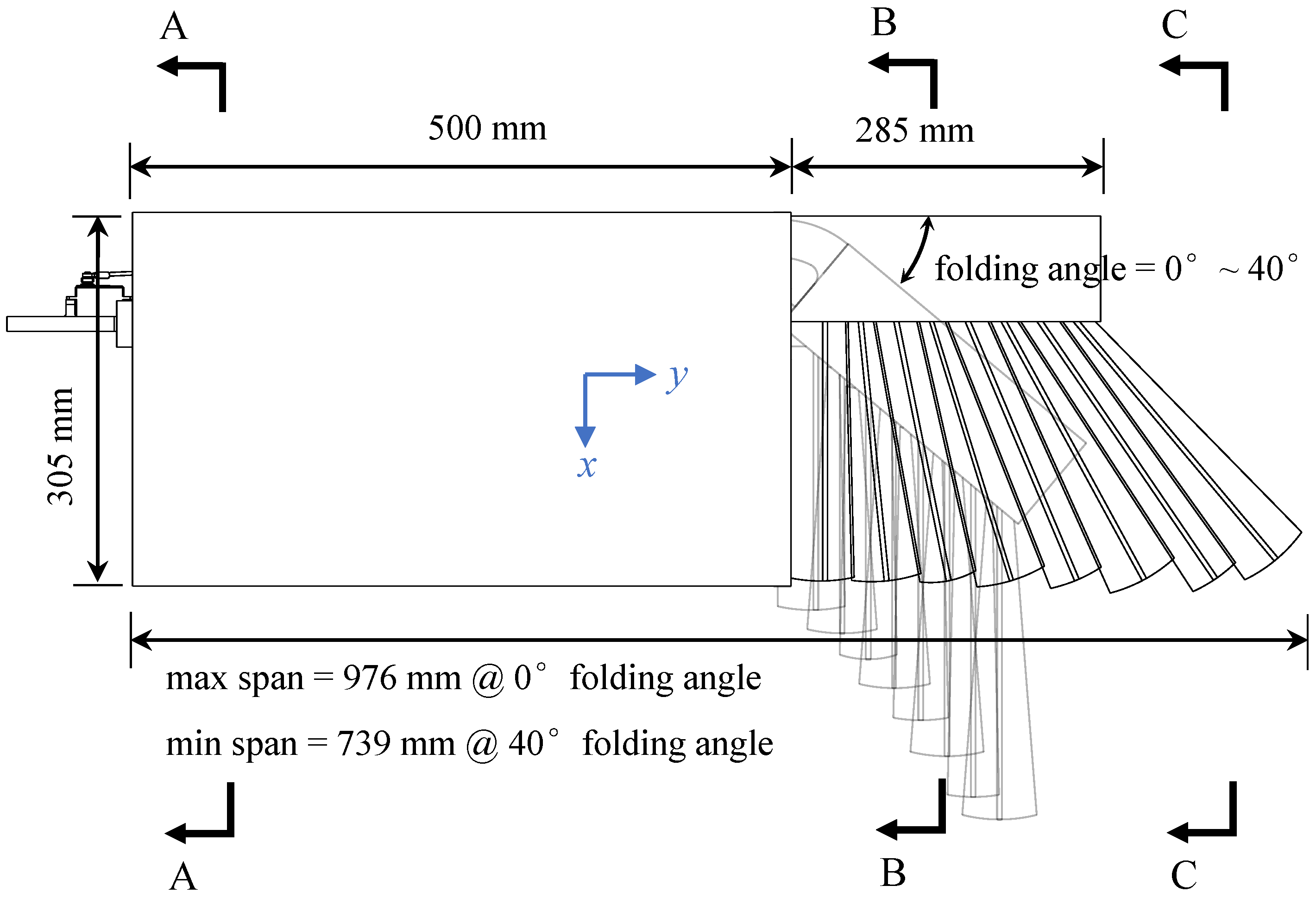
2.2. Detailed Design of Folding Mechanisms and Connectors
3. Aerodynamic Loads of Elastic Wings
3.1. Aeroelasticity Modeling
3.1.1. Structure Modeling
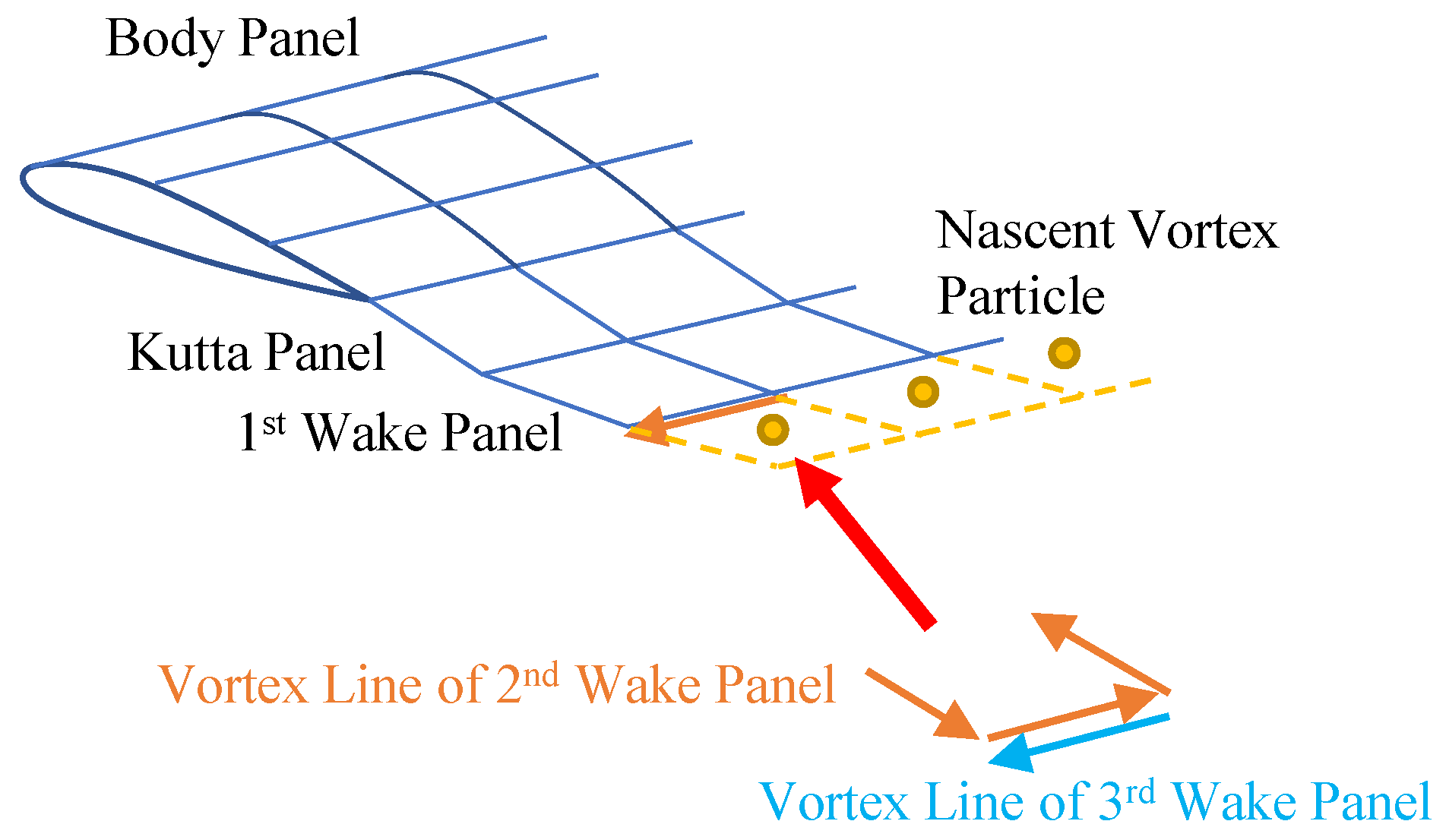
3.1.2. Aerodynamic Modeling
3.1.3. Coupling
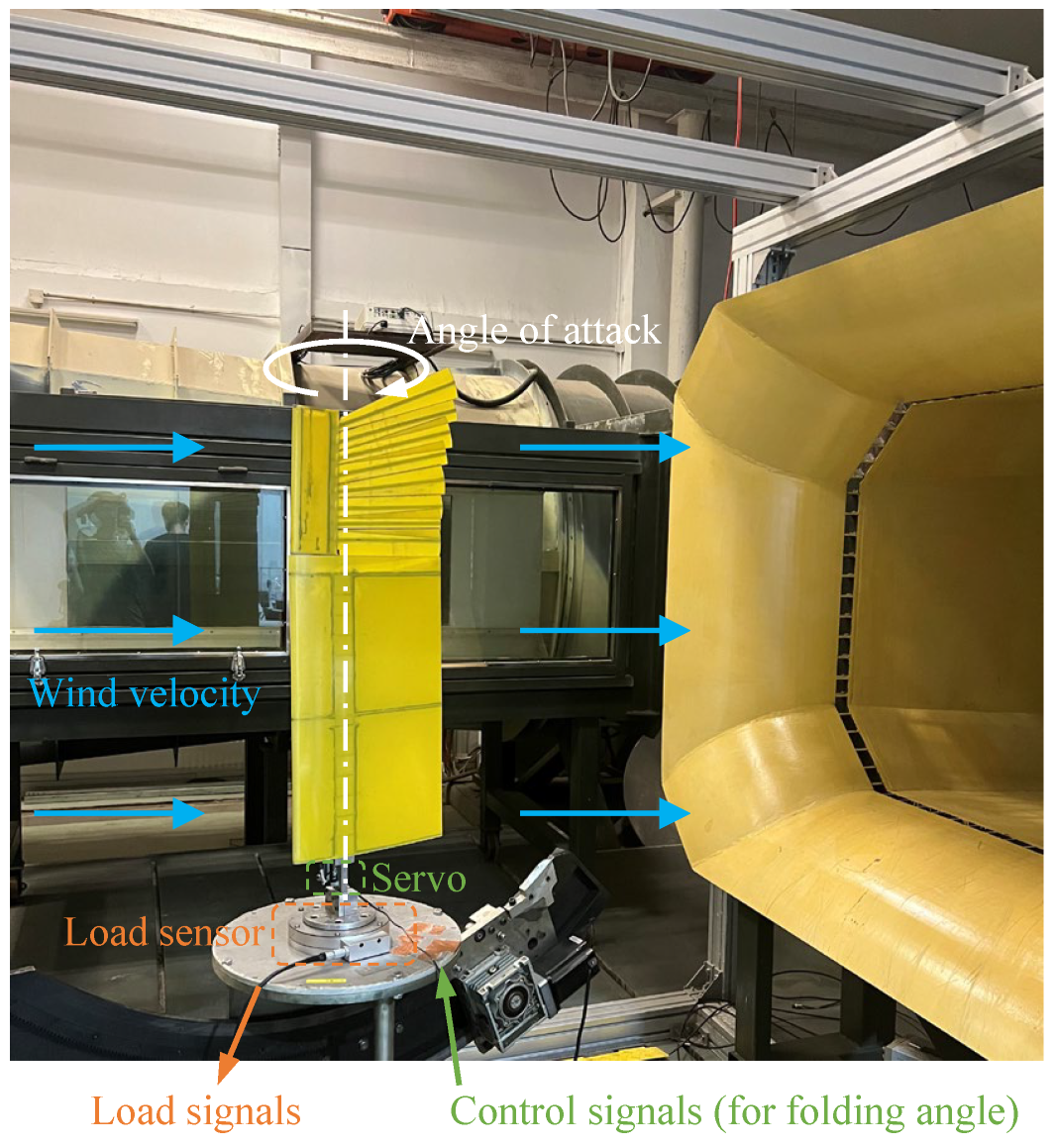
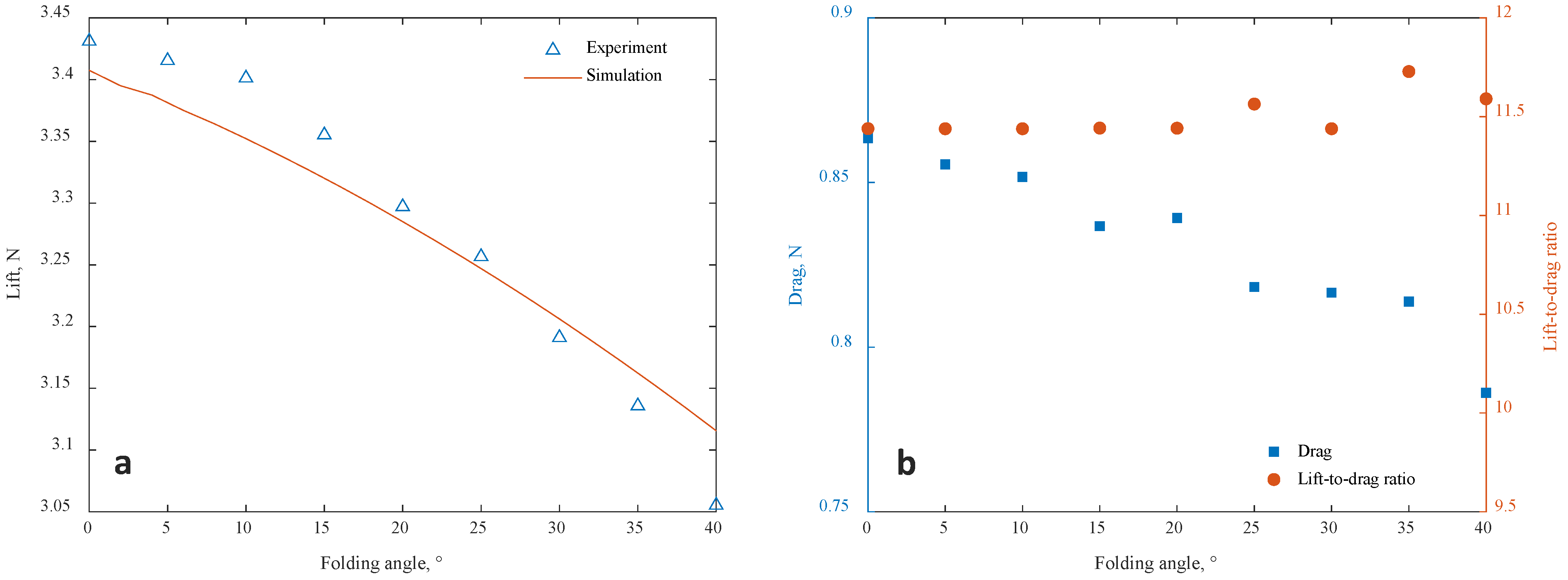
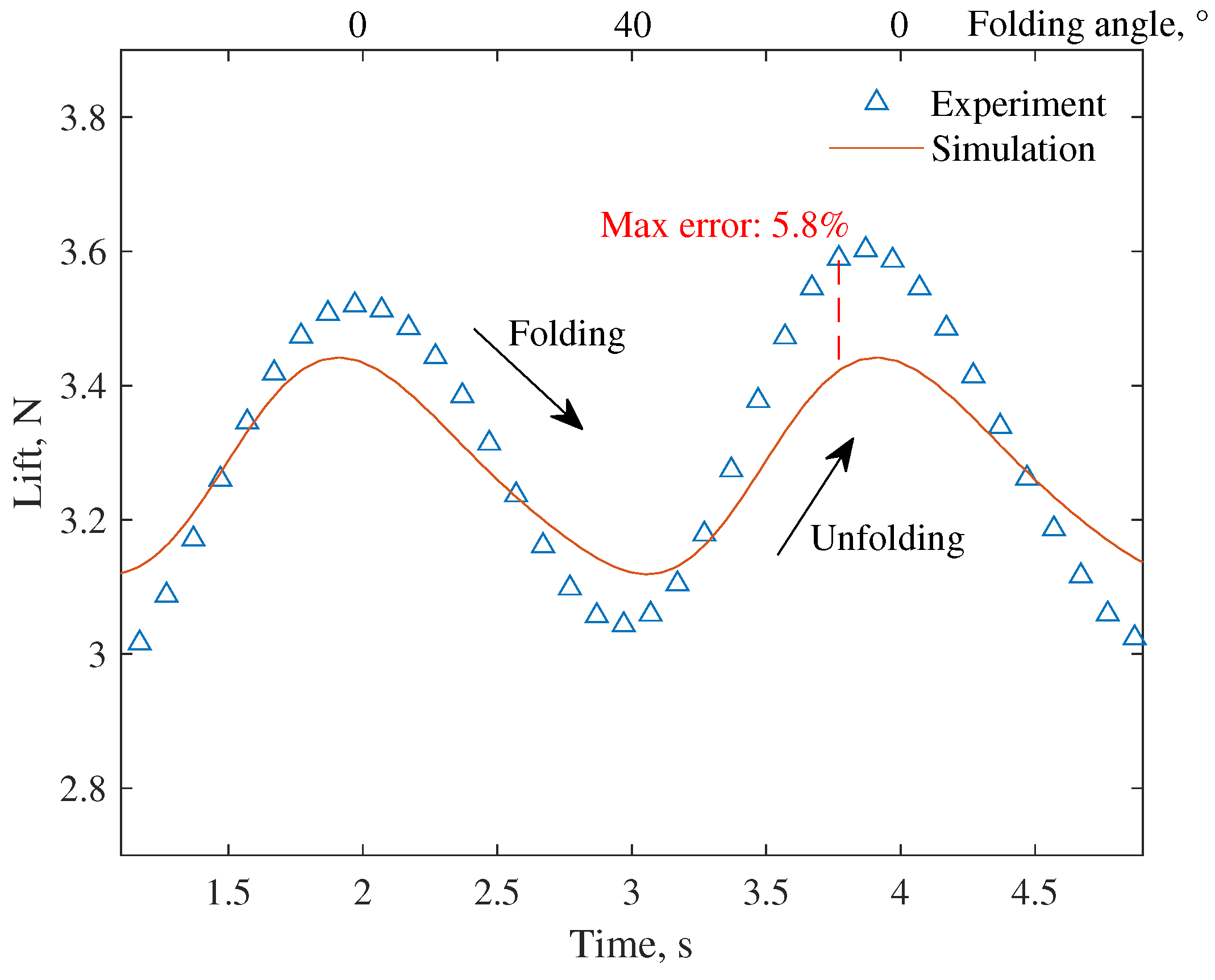
3.2. Numerical Simulation and Wind-Tunnel Test
4. Gust Response and Alleviation
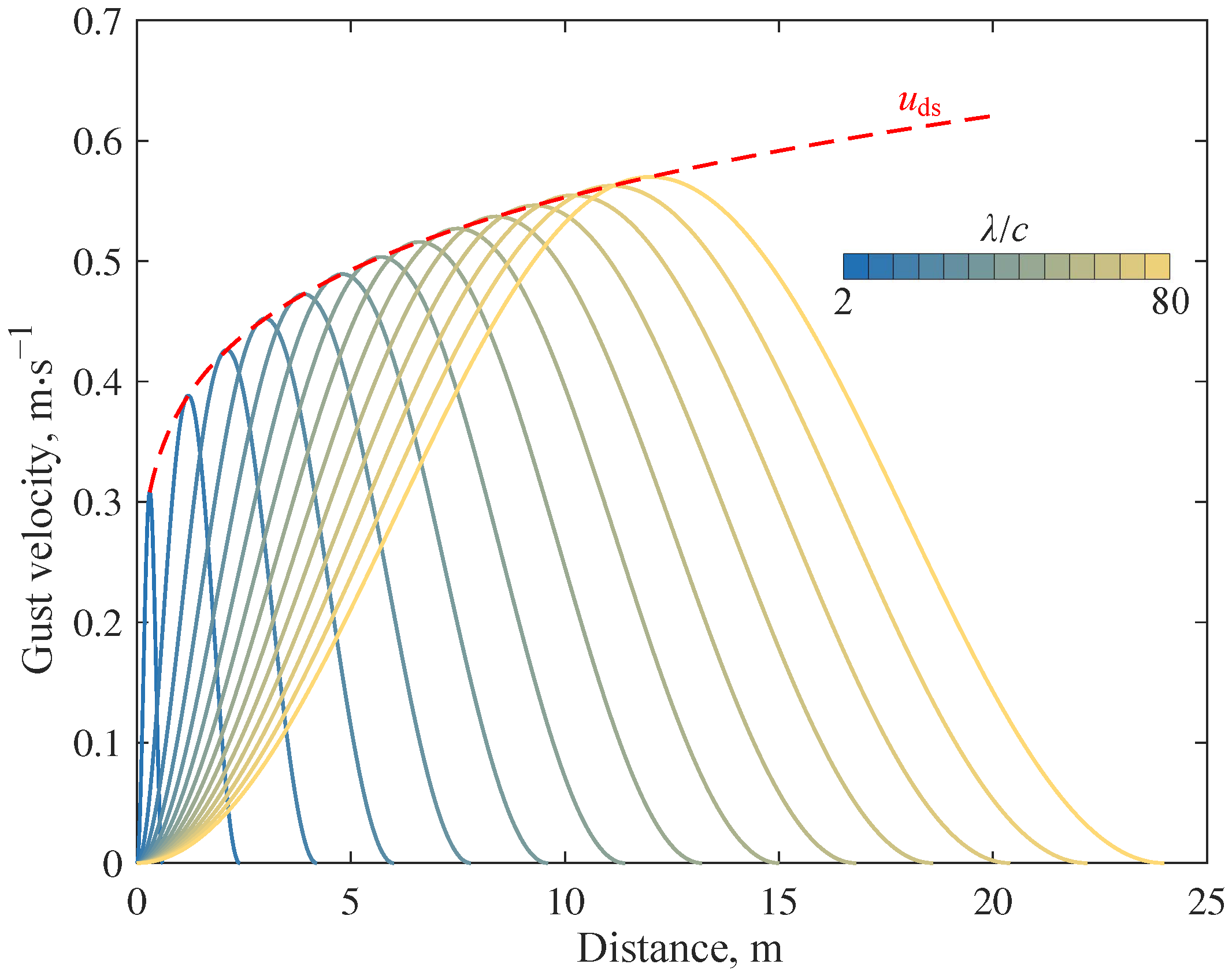
4.1. Gust Modeling
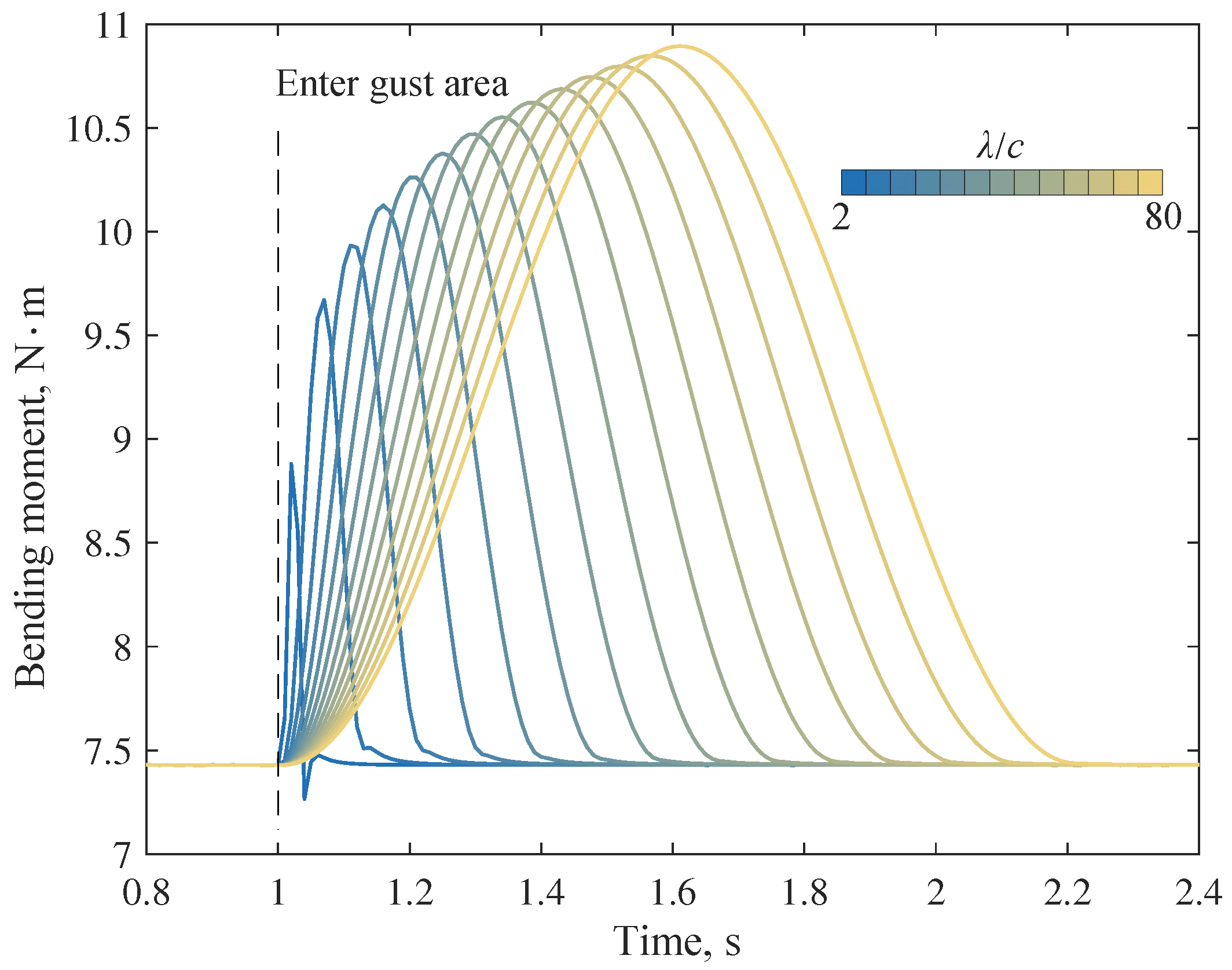
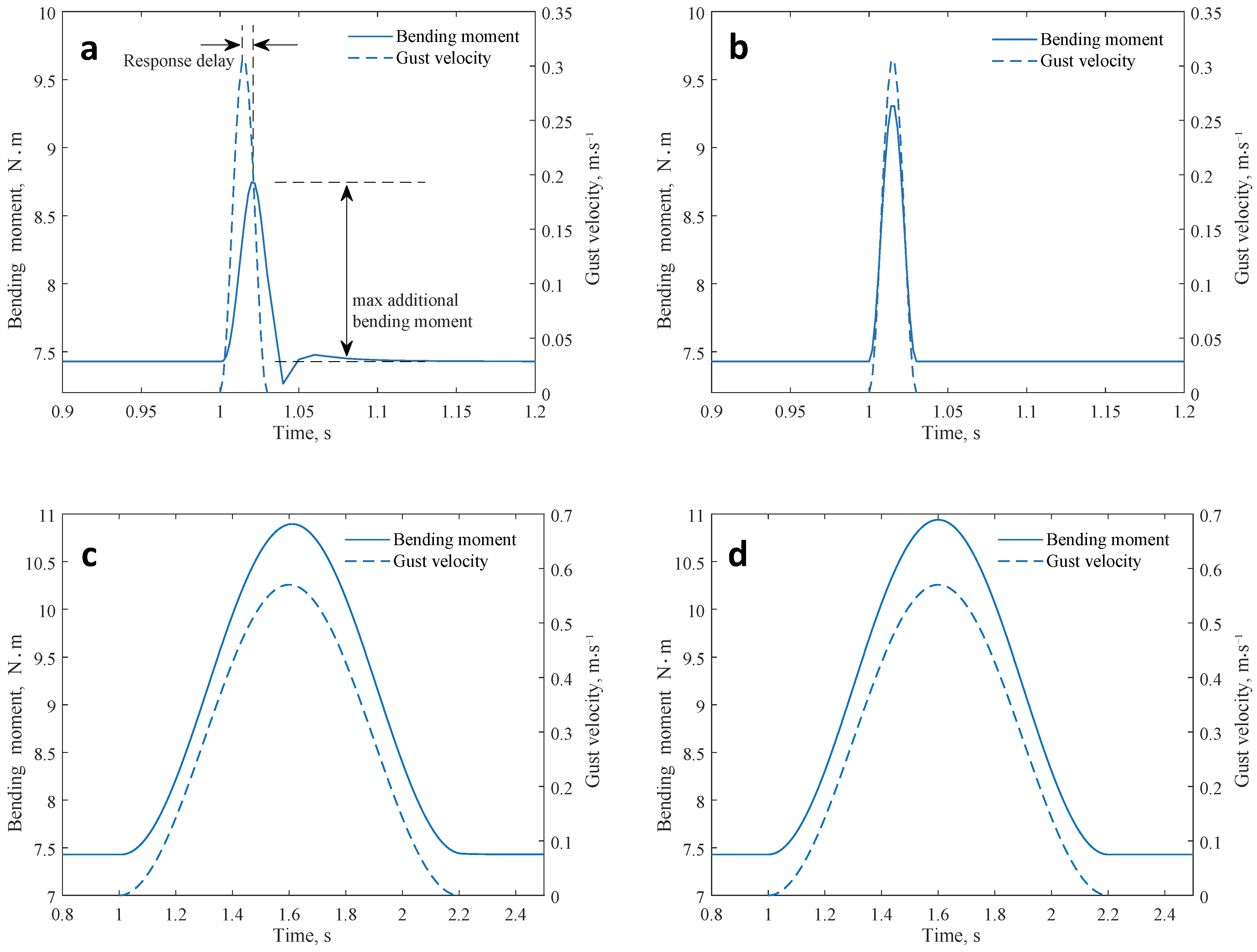
4.2. Gust Response
4.3. Gust Alleviation
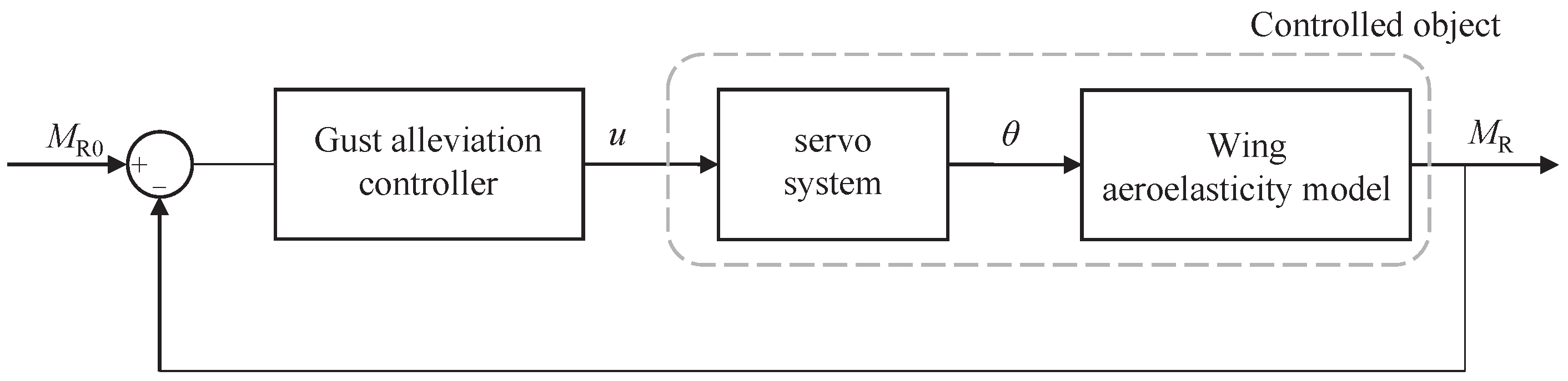
4.3.1. Wing Aeroservoelastic System
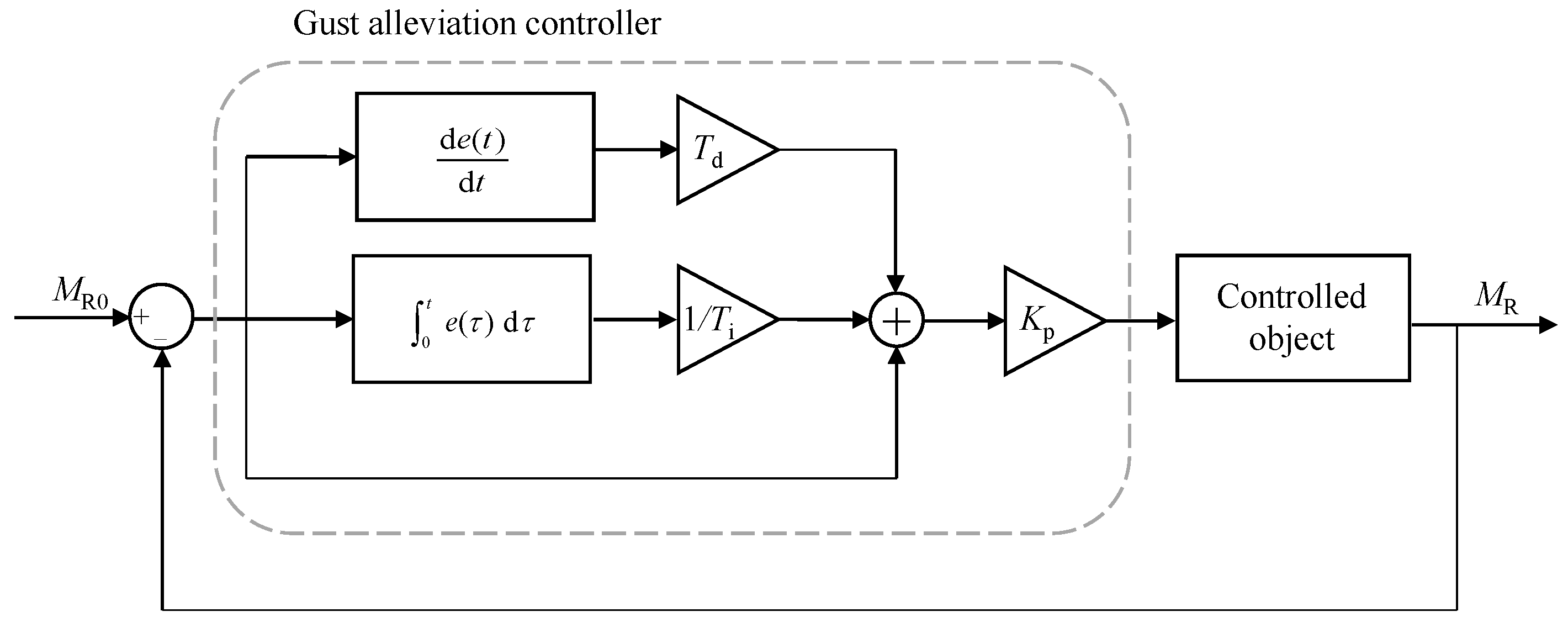
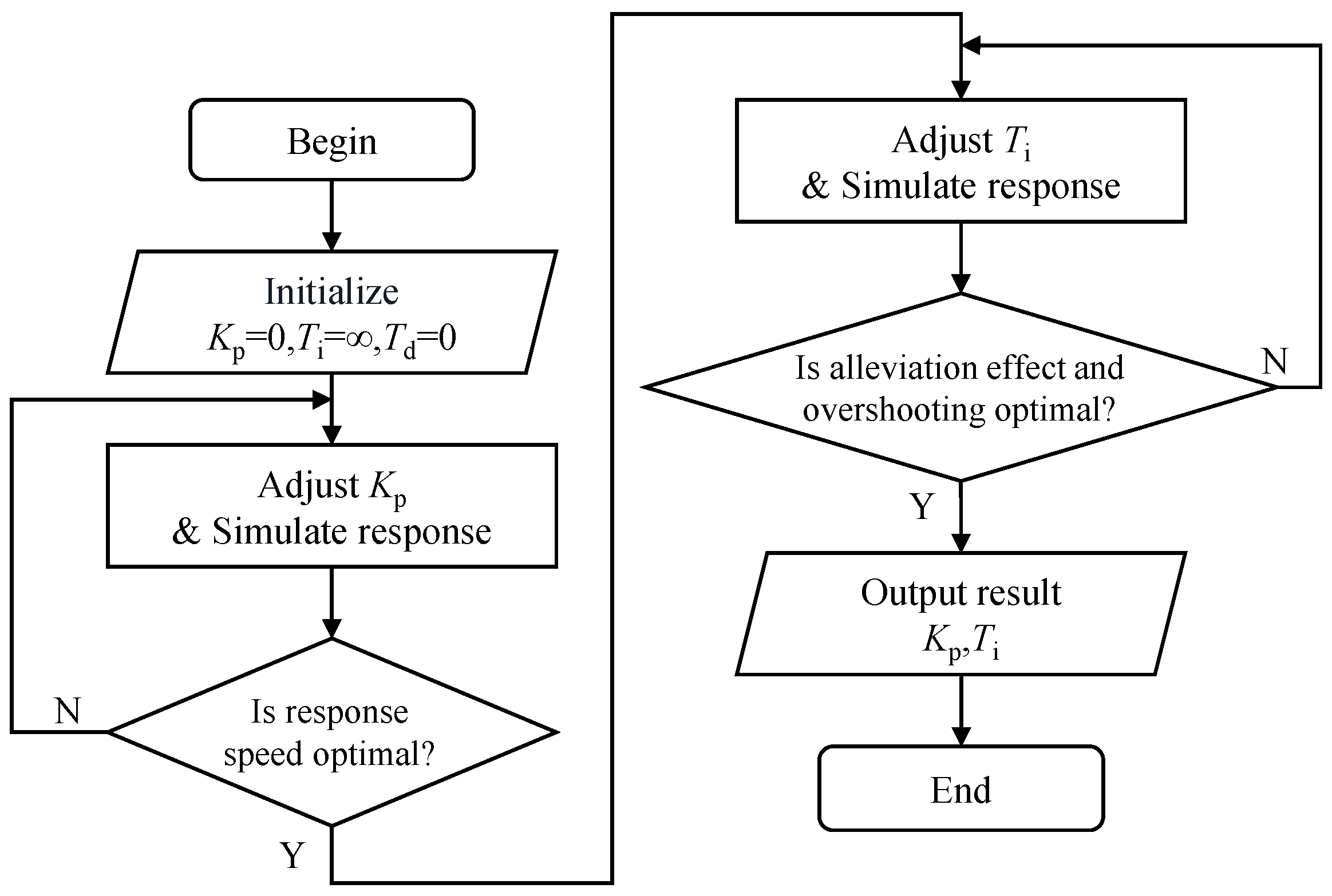
4.3.2. Gust Alleviation Controller
4.3.3. Numerical Simulation
5. Discussion
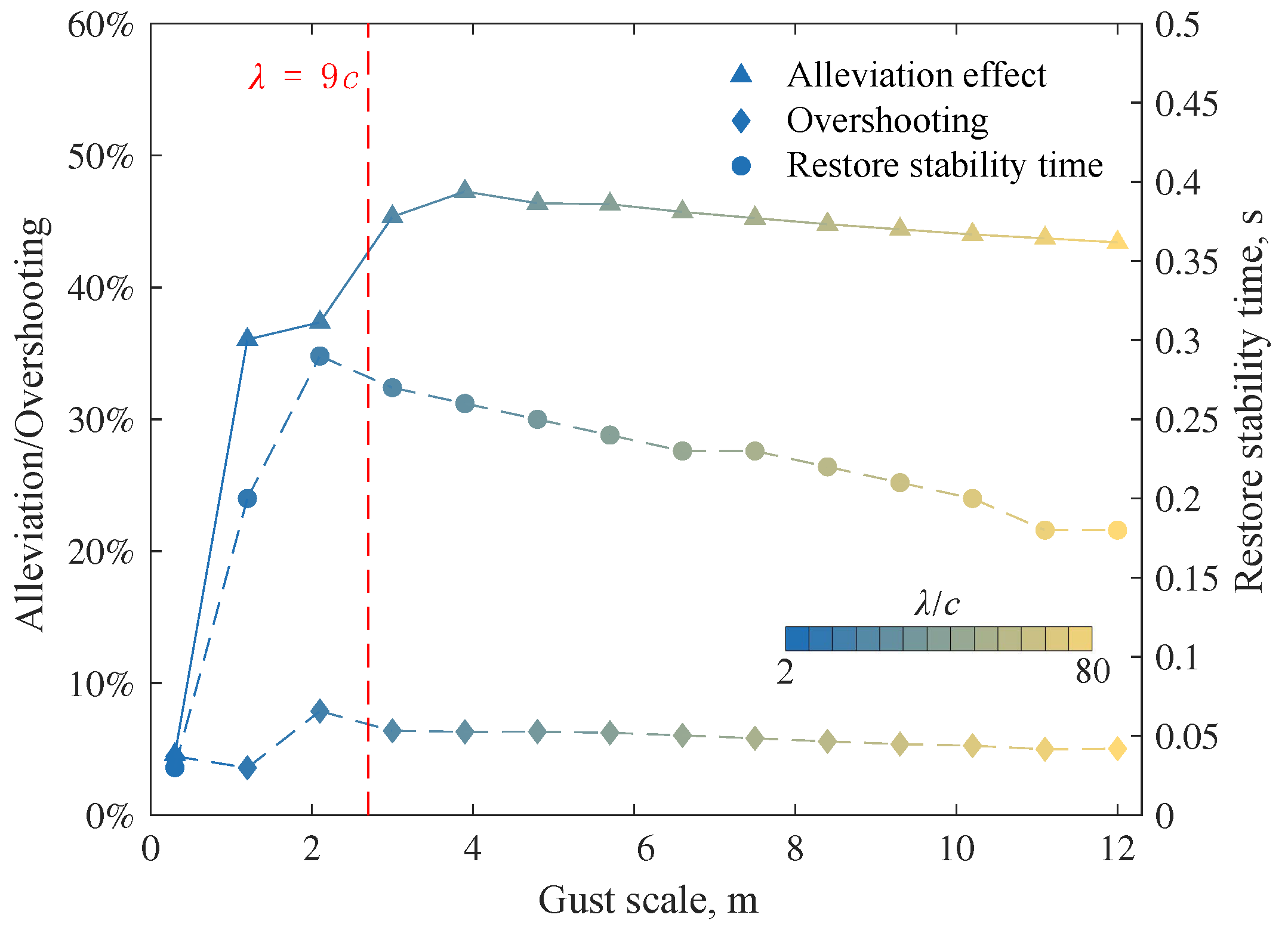
- alleviation effect, the ability of the controller to suppress additional gust bending moments.
- overshooting, correlating with response stability.
- restore stability time, the time taken from the end of gust action to the moment when the bending moment comes back to the corridor of .
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
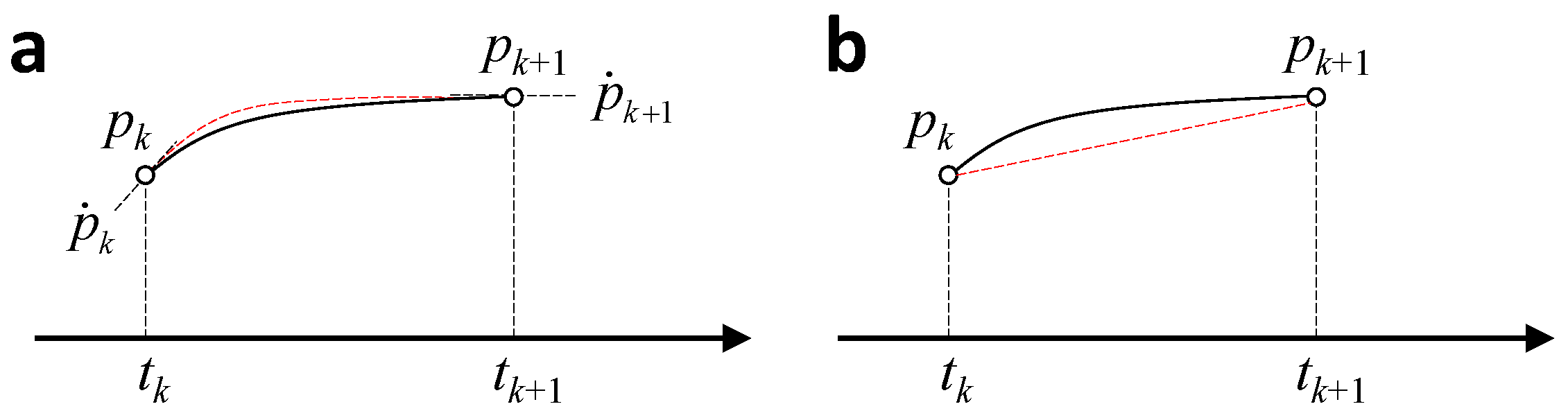
Appendix A. Coefficient Matrices of the Recursive Formula
Appendix B. State–Space Realization of Transfer Function and Its Discretization
References
- Cui, S.; Peng, Z.; Yang, H.; Liu, H.; Liu, Y.; Wu, J. Swifts Form V-Shaped Wings While Dipping in Water to Fine-Tune Balance. Biomimetics 2024, 9, 457. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Xiao, Y.; Guo, Q.; Cui, F.; Zhao, J.; Wu, G.; Wu, C.; Liu, W. Stability and Controller Research of Double-Wing FMAV System Based on Controllable Tail. Biomimetics 2024, 9, 449. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Jiang, S.; Wang, Y.; Xiao, H. Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin. Aerospace 2023, 10, 678. [Google Scholar] [CrossRef]
- Harvey, C.; Baliga, V.; Wong, J.; Altshuler, D.; Inman, D. Birds can transition between stable and unstable states via wing morphing. Nature 2022, 603, 648–653. [Google Scholar] [CrossRef]
- Grant, D.T.; Abdulrahim, M.; Lind, R. Flight Dynamics of a Morphing Aircraft Utilizing Independent Multiple-Joint Wing Sweep. Int. J. Micro Air Veh. 2010, 2, 91–106. [Google Scholar] [CrossRef]
- Di Luca, M.; Mintchev, S.; Heitz, G.; Noca, F.; Floreano, D. Bioinspired morphing wings for extended flight envelope and roll control of small drones. Interface Focus 2017, 7, 20160092. [Google Scholar] [CrossRef]
- Ajanic, E.; Feroskhan, M.; Mintchev, S.; Noca, F.; Floreano, D. Bioinspired wing and tail morphing extends drone flight capabilities. Sci. Robot. 2020, 5, eabc2897. [Google Scholar] [CrossRef]
- Chang, E.; Matloff, L.Y.; Stowers, A.K.; Lentink, D. Soft biohybrid morphing wings with feathers underactuated by wrist and finger motion. Sci. Robot. 2020, 5, eaay1246. [Google Scholar] [CrossRef]
- Kilian, L.; Shahid, F.; Zhao, J.S.; Nayeri, C.N. Bioinspired morphing wings: Mechanical design and wind tunnel experiments. Bioinspir. Biomim. 2022, 17, 046019. [Google Scholar] [CrossRef]
- Hui, Z.; Zhang, Y.; Chen, G. Aerodynamic performance investigation on a morphing unmanned aerial vehicle with bio-inspired discrete wing structures. Aerosp. Sci. Technol. 2019, 95, 105419. [Google Scholar] [CrossRef]
- Ajanic, E.; Paolini, A.; Coster, C.; Floreano, D.; Johansson, C. Robotic Avian Wing Explains Aerodynamic Advantages of Wing Folding and Stroke Tilting in Flapping Flight. Adv. Intell. Syst. 2023, 5, 2200148. [Google Scholar] [CrossRef]
- Thielicke, W.; Stamhuis, E.J. The effects of wing twist in slow-speed flapping flight of birds: Trading brute force against efficiency. Bioinspir. Biomim. 2018, 13, 056015. [Google Scholar] [CrossRef] [PubMed]
- Roshanbin, A.; Abad, F.; Preumont, A. Kinematic and Aerodynamic Enhancement of a Robotic Hummingbird. AIAA J. 2019, 57, 4599–4607. [Google Scholar] [CrossRef]
- Zhao, R.; Yu, K.; Hulbert, G. Time discontinuous finite element method for transient response analysis of linear time-varying structures. Meccanica 2018, 53, 703–726. [Google Scholar] [CrossRef]
- Zhao, R.; Yu, K. Hamilton’s law of variable mass system and time finite element formulations for time-varying structures based on the law. Int. J. Numer. Methods Eng. 2014, 99, 711–736. [Google Scholar] [CrossRef]
- Riff, R.; Baruch, M. Time Finite Element Discretization of Hamilton’s Law of Varying Action. AIAA J. 1984, 22, 1310–1318. [Google Scholar] [CrossRef]
- Baruch, M.; Riff, R. Hamilton’s principle, Hamilton’s law - 6 to the n power correct formulations. AIAA J. 1982, 20, 687–692. [Google Scholar] [CrossRef]
- Savino, A.; Cocco, A.; Zanotti, A.; Tugnoli, M.; Masarati, P.; Muscarello, V. Coupling Mid-Fidelity Aerodynamics and Multibody Dynamics for the Aeroelastic Analysis of Rotary-Wing Vehicles. Energies 2021, 14, 6979. [Google Scholar] [CrossRef]
- Zhu, W.; Morandini, M.; Li, S. Viscous Vortex Particle Method Coupling with Computational Structural Dynamics for Rotor Comprehensive Analysis. Appl. Sci. 2021, 11, 3149. [Google Scholar] [CrossRef]
- Colognesi, V.; Ronsse, R.; Chatelain, P. Model coupling biomechanics and fluid dynamics for the simulation of controlled flapping flight. Bioinspir. Biomim. 2021, 16, 026023. [Google Scholar] [CrossRef]
- Tugnoli, M.; Montagnani, D.; Syal, M.; Droandi, G.; Zanotti, A. Mid-fidelity approach to aerodynamic simulations of unconventional VTOL aircraft configurations. Aerosp. Sci. Technol. 2021, 115, 106804. [Google Scholar] [CrossRef]
- Matloff, L.Y.; Chang, E.; Feo, T.J.; Jeffries, L.; Stowers, A.K.; Thomson, C.; Lentink, D. How flight feathers stick together to form a continuous morphing wing. Science 2020, 367, 293–297. [Google Scholar] [CrossRef] [PubMed]
- Jenett, B.; Calisch, S.; Cellucci, D.; Cramer, N.; Gershenfeld, N.; Swei, S.; Cheung, K.C. Digital Morphing Wing: Active Wing Shaping Concept Using Composite Lattice-Based Cellular Structures. Soft Robot. 2017, 4, 33–48. [Google Scholar] [CrossRef] [PubMed]
- Cramer, N.B.; Cellucci, D.W.; Formoso, O.B.; Gregg, C.E.; Jenett, B.E.; Kim, J.H.; Lendraitis, M.; Swei, S.S.; Trinh, G.T.; Trinh, K.V.; et al. Elastic shape morphing of ultralight structures by programmable assembly. Smart Mater. Struct. 2019, 28, 055006. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z.; Song, C.; Yang, C. A morphing wing with cellular structure of non-uniform density. Smart Mater. Struct. 2021, 30, 105005. [Google Scholar] [CrossRef]
- Harvey, C.; Inman, D.J. Aerodynamic efficiency of gliding birds vs comparable UAVs: A review. Bioinspir. Biomim. 2021, 16, 031001. [Google Scholar] [CrossRef]
- Harvey, C.; Gamble, L.L.; Bolander, C.R.; Hunsaker, D.F.; Joo, J.J.; Inman, D.J. A review of avian-inspired morphing for UAV flight control. Prog. Aerosp. Sci. 2022, 132, 100825. [Google Scholar] [CrossRef]
- Winckelmans, G.S. Topics in Vortex Methods for the Computation of Three- and Two-Dimensional Incompressible Unsteady Flows. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 1989. [Google Scholar] [CrossRef]
- Hess, J.L.; Smith, A.M.O. Calculation of Nonlifting Potential Flow About Arbitrary Three-Dimensional Bodies. J. Ship Res. 1964, 8, 22–44. [Google Scholar] [CrossRef]
- Heinrich, R.; Reimer, L. Comparison of different approaches for gust modeling in the CFD Code TAU. In Proceedings of the International Forum on Aeroelasticity & Structural Dynamics, Bristol, UK, 24–26 June 2013; pp. 24–27. [Google Scholar]
- Heinrich, R. Simulation of Interaction of Aircraft and Gust Using the TAU-Code. In New Results in Numerical and Experimental Fluid Mechanics IX: Contributions to the 18th STAB/DGLR Symposium, Stuttgart, Germany, 2012; Dillmann, A., Heller, G., Krämer, E., Kreplin, H.P., Nitsche, W., Rist, U., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 503–511. [Google Scholar] [CrossRef]
- Lunze, J. Beschreibung und Analyse zeitdiskreter Systeme im Zeitbereich. In Regelungstechnik 2: Mehrgrößensysteme, Digitale Regelung; Springer: Berlin/Heidelberg, Germany, 2020; pp. 441–500. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Process | Material | Elasticity Modulus | Density |
|---|---|---|---|---|
| Beam | L-PBF 1 | AlSi10Mg | 50,000 MPa | 2.7 g·cm |
| Rib | L-PBF | AlSi10Mg | 50,000 MPa | 2.7 g·cm |
| Foldable segment | SLS 2 | Fiber-added nylon | 3500 MPa | 1.1 g·cm |
| Rachis | Cutting | Aluminum alloy | 70,000 MPa | 2.7 g·cm |
| Skin | Laser cut | Glass fiberboard | 25,000 MPa | 1.8 g·cm |
| Mode No. | #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|---|
| Modal damping ratio | 0.0263 | 0.0825 | 0.08 | 0.0229 | 0.0402 | 0.0331 |
| Gust Scale | Fitting Results * | |
|---|---|---|
| 0.9998 | ||
| 0.9994 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Yang, H.; Yang, Y.; Song, C.; Yang, C. Gust Response and Alleviation of Avian-Inspired In-Plane Folding Wings. Biomimetics 2024, 9, 641. https://doi.org/10.3390/biomimetics9100641
Zhang H, Yang H, Yang Y, Song C, Yang C. Gust Response and Alleviation of Avian-Inspired In-Plane Folding Wings. Biomimetics. 2024; 9(10):641. https://doi.org/10.3390/biomimetics9100641
Chicago/Turabian StyleZhang, Haibo, Haolin Yang, Yongjian Yang, Chen Song, and Chao Yang. 2024. "Gust Response and Alleviation of Avian-Inspired In-Plane Folding Wings" Biomimetics 9, no. 10: 641. https://doi.org/10.3390/biomimetics9100641
APA StyleZhang, H., Yang, H., Yang, Y., Song, C., & Yang, C. (2024). Gust Response and Alleviation of Avian-Inspired In-Plane Folding Wings. Biomimetics, 9(10), 641. https://doi.org/10.3390/biomimetics9100641