

Trajectory Tracking and Obstacle Avoidance of Robotic Fish Based on Nonlinear Model Predictive Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The utilization of nonlinear model predictive control (NMPC) in the realm of motion control for nonlinear robotic fish systems. This approach utilizes real-time optimization solutions to boost the adaptability of robotic fish in different surroundings, allowing for accurate trajectory tracking and obstacle navigation. In contrast to conventional trajectory planning techniques that predominantly focus on position and velocity alterations, this methodology incorporates enhanced control over acceleration.
- (2)
- The implementation of trajectory planning and optimization algorithms based on acceleration, which enables the achievement of smoother motion for robotic fish and the reduction of excessive inertial forces during movement. Consequently, this approach improves the precision of trajectory monitoring as well as the level of comfort experienced.
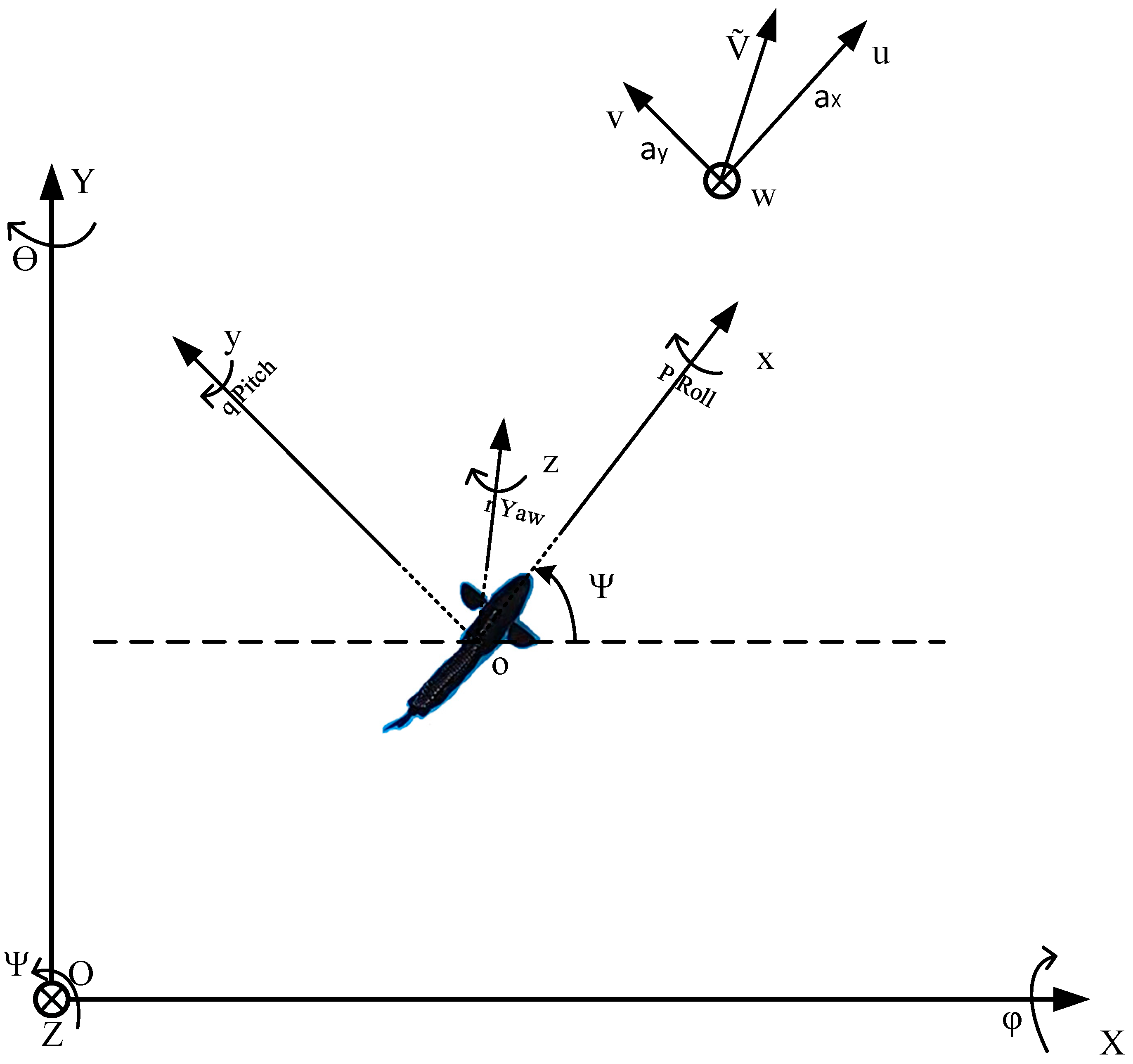
2. Modeling of Robotic Fish
3. A NMPC-Based Control Method for Robotic Fish
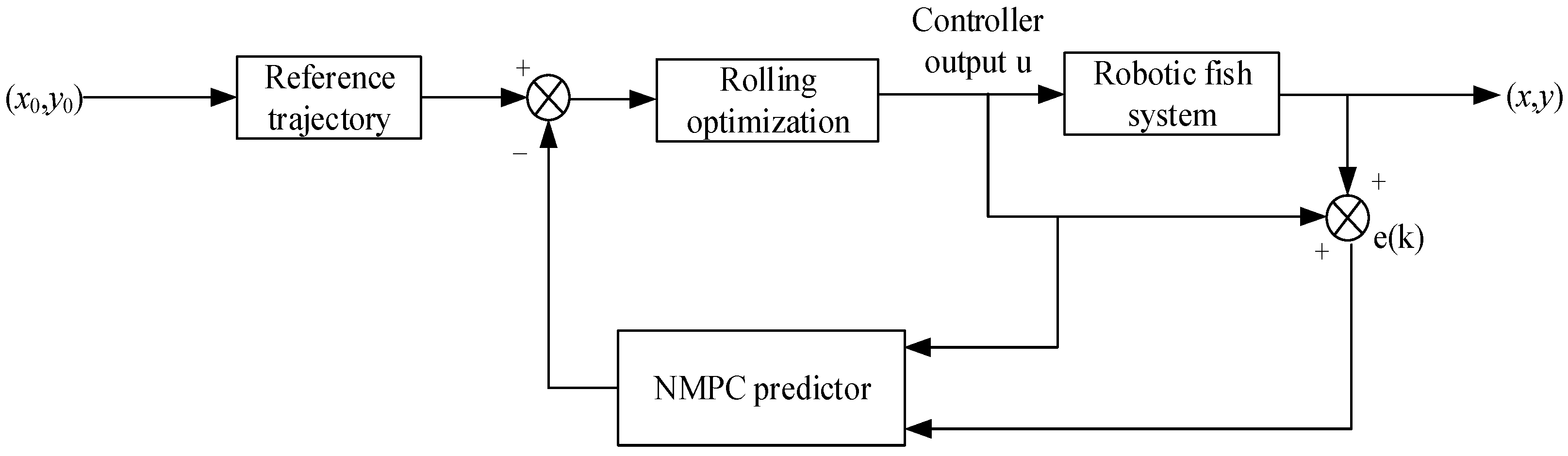
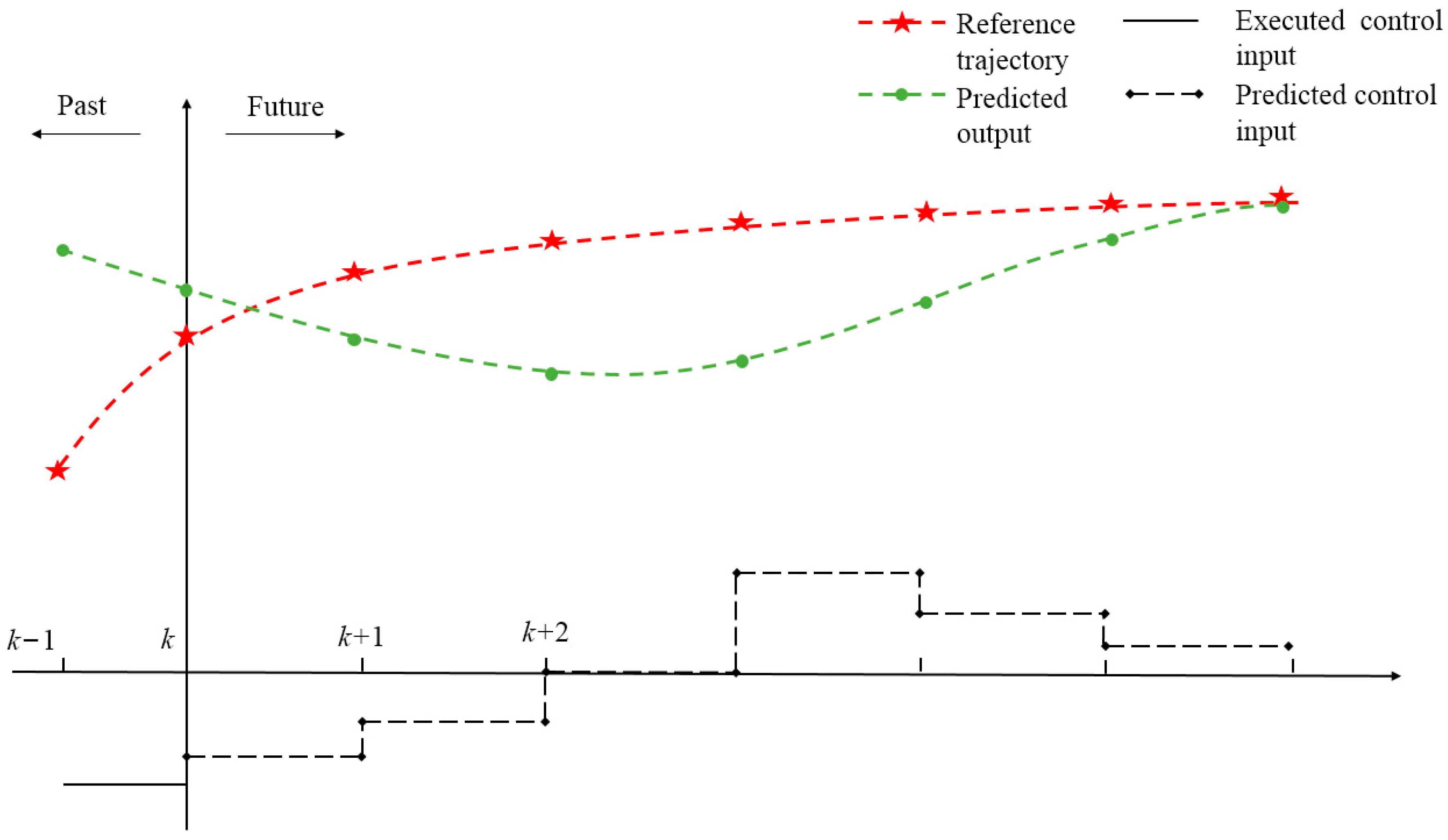
3.1. Overview of NMPC Algorithm
3.2. Functions for Obstacle Avoidance and Objective Functions
3.3. Design of the NMPC Controller
4. Simulation Analysis and Validation
4.1. Trajectory Tracking Control Algorithm
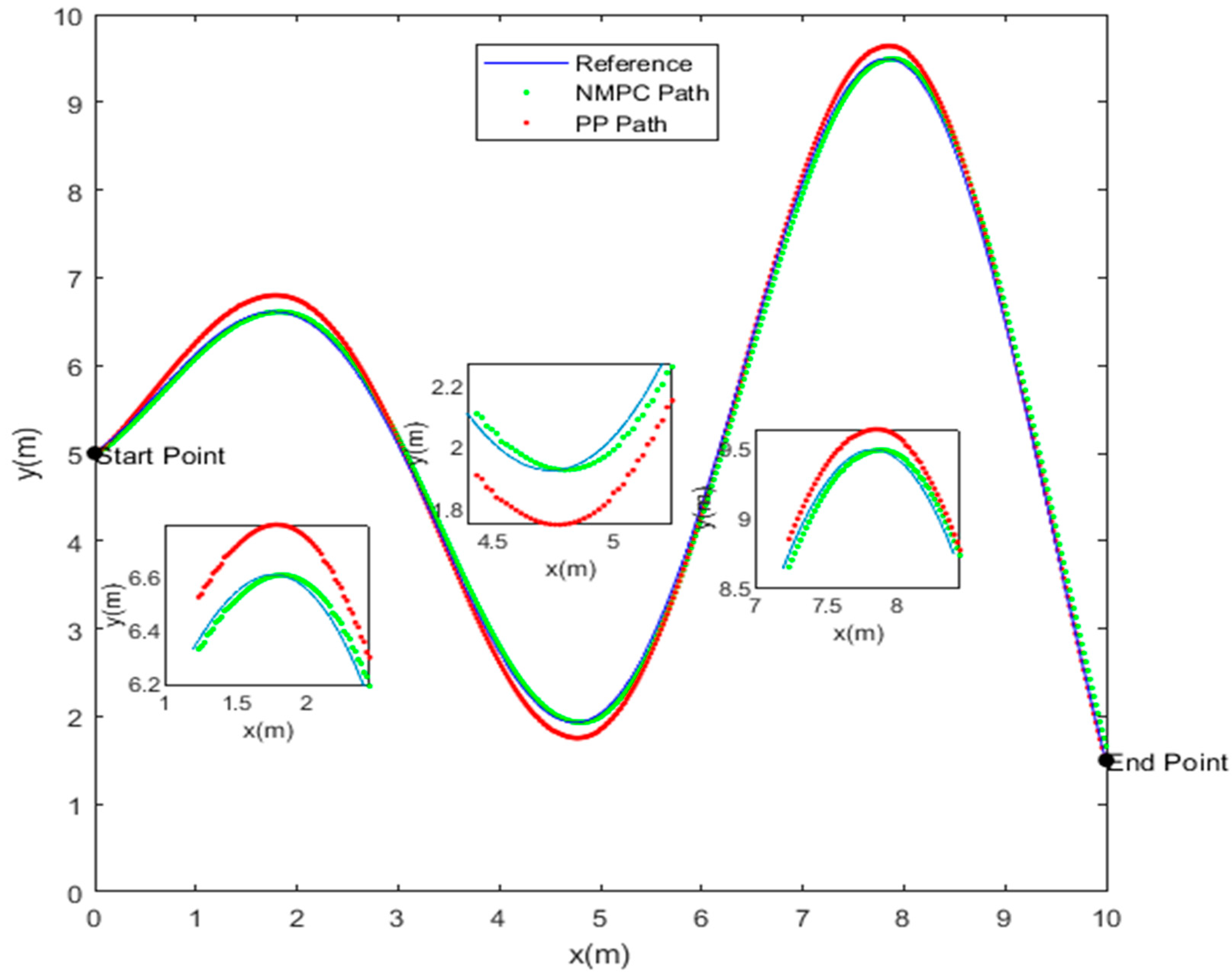
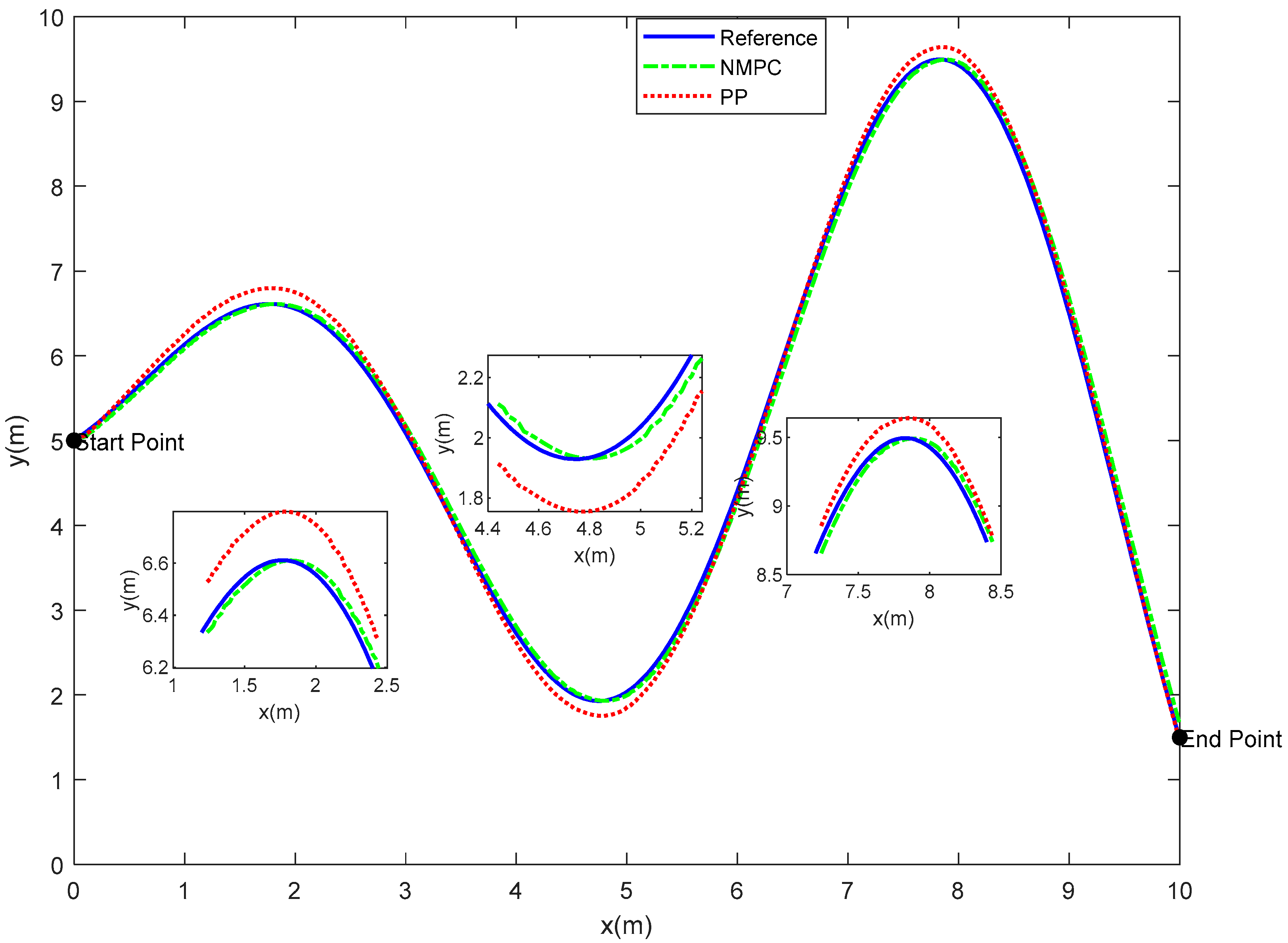
4.1.1. Control of S-Shaped Curve Trajectory Tracking
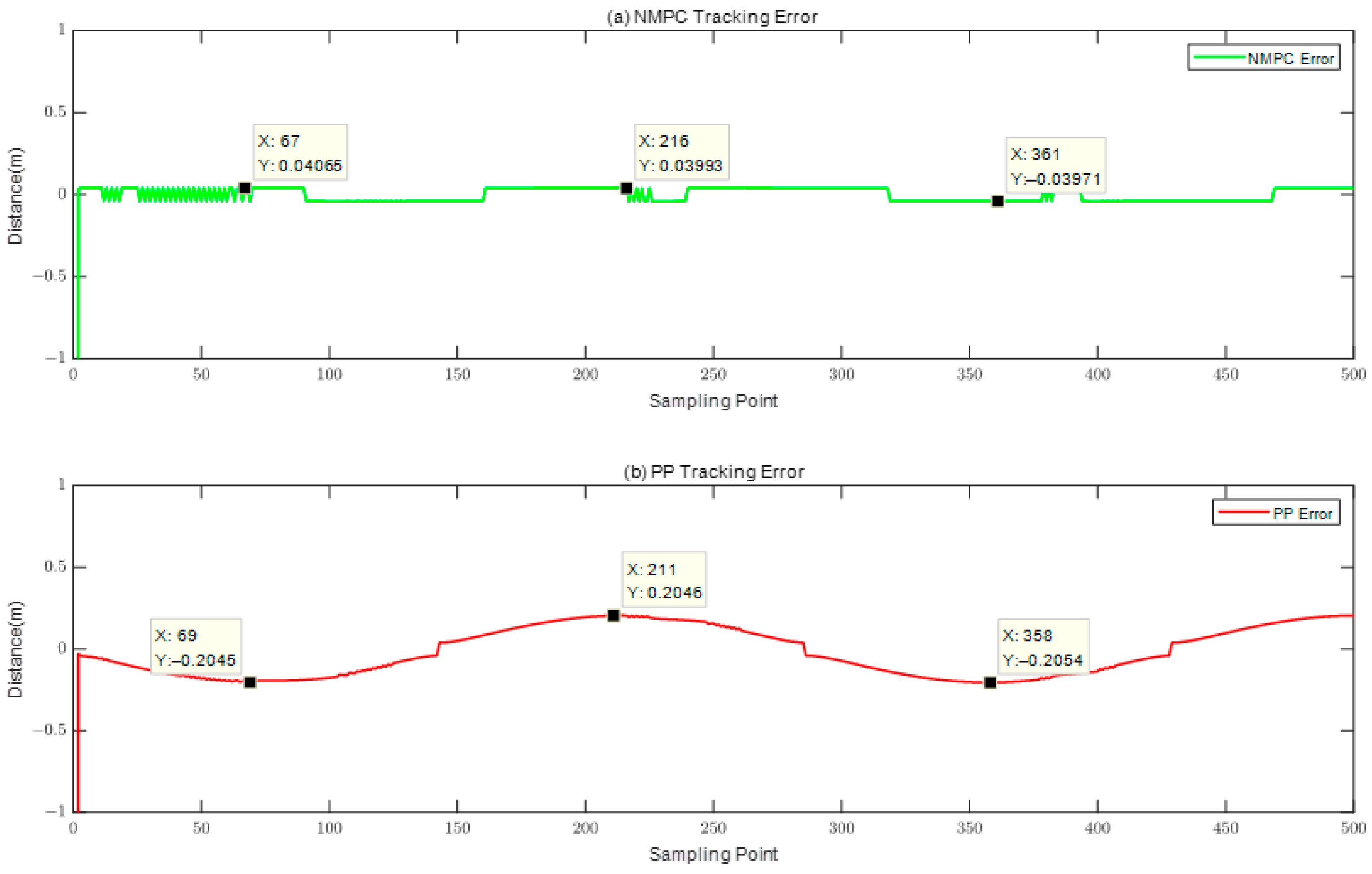
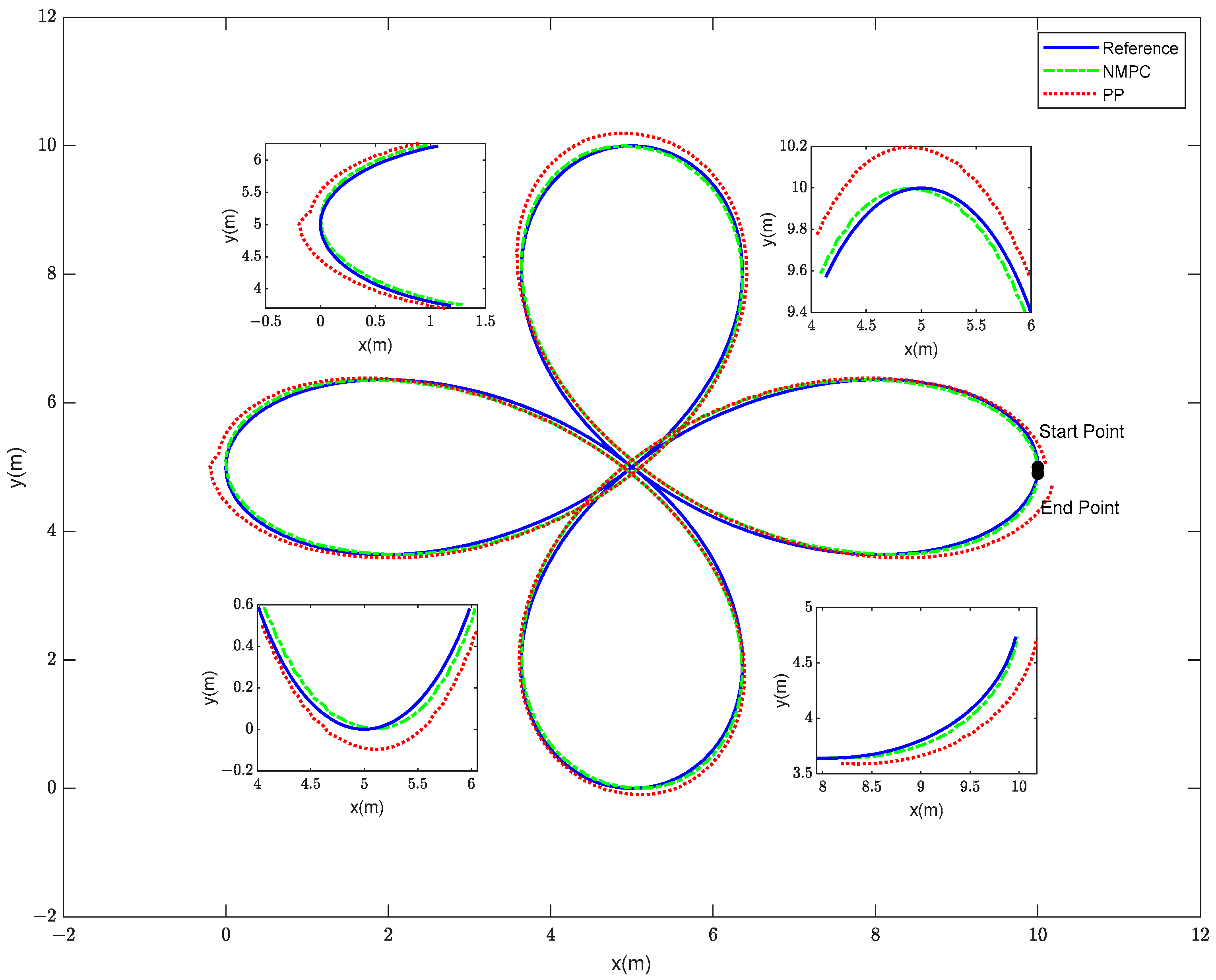
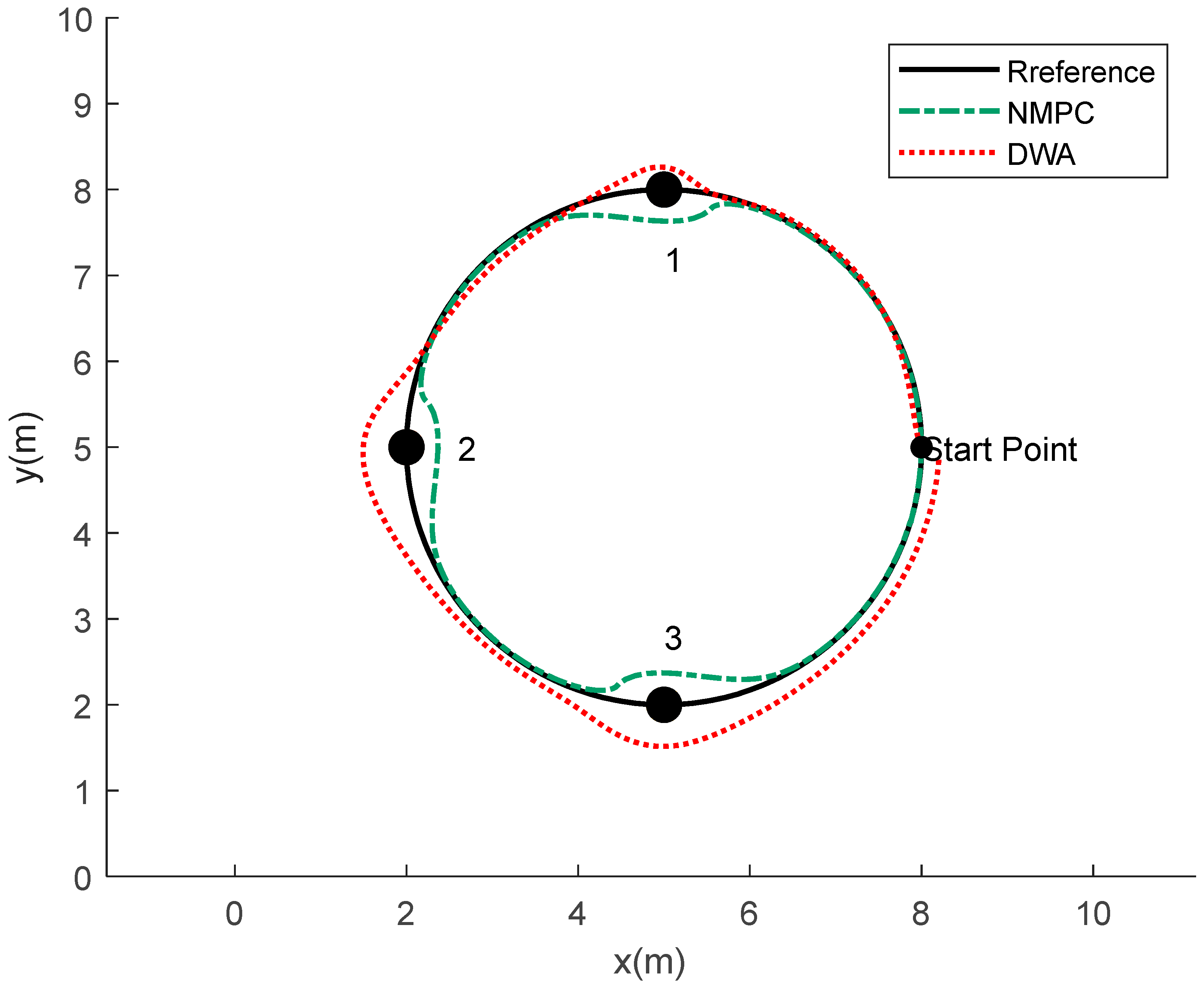
4.1.2. Trajectory Tracking Control of Cloverleaf-Shaped Curves
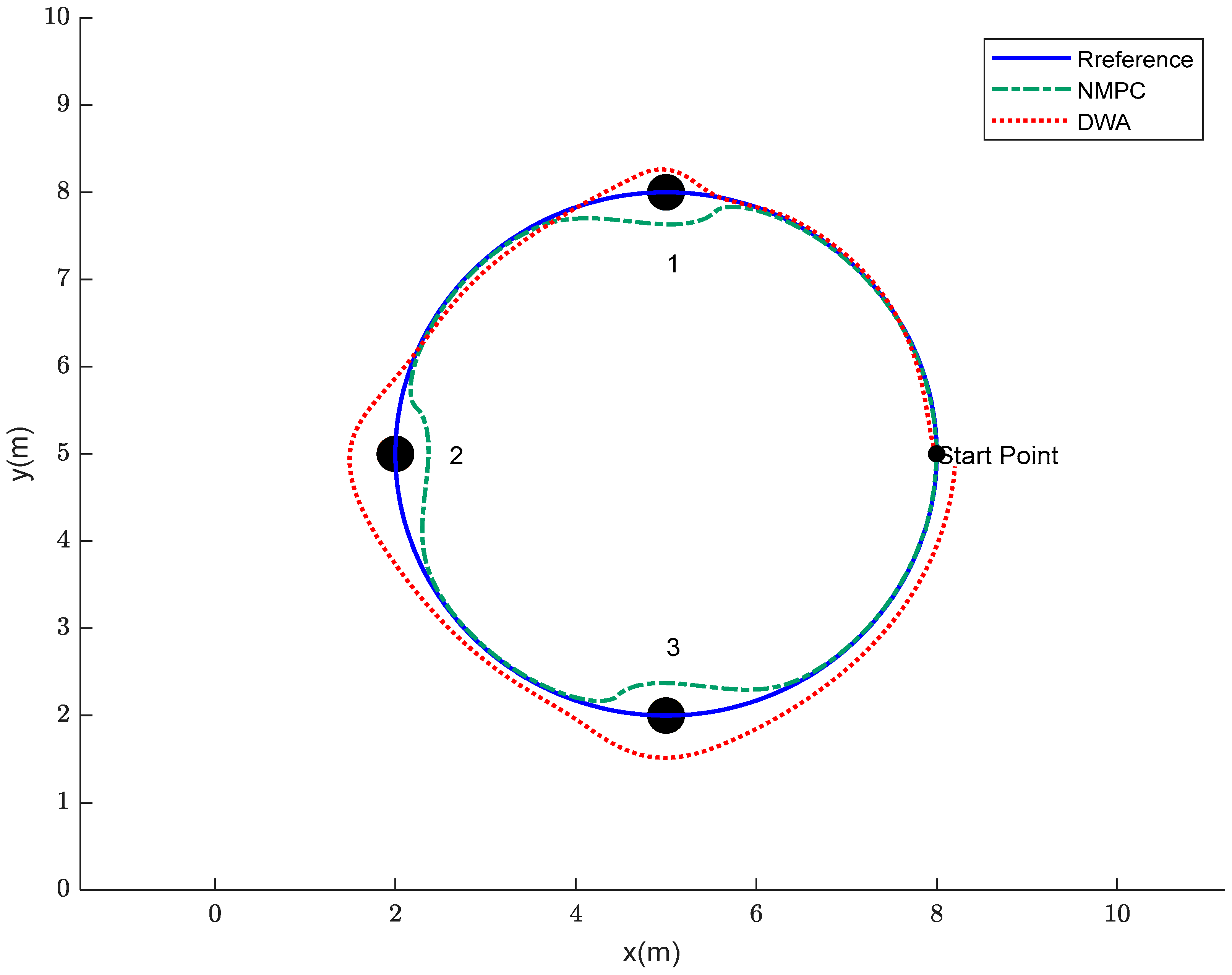
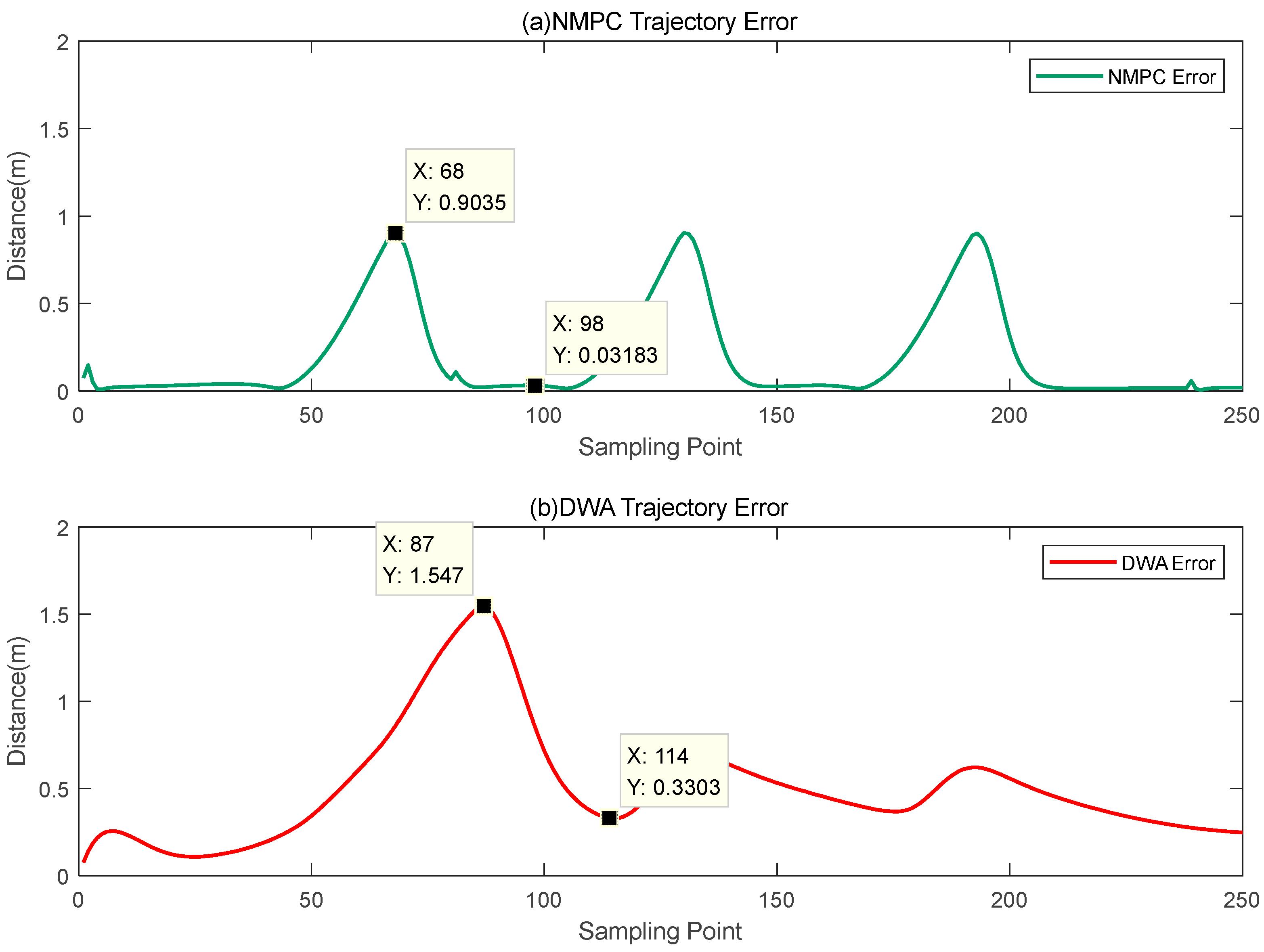
4.2. Validation of Obstacle Avoidance Planning and Control Algorithm
5. Discussion
5.1. Limitations
- One of the main challenges associated with NMPC approaches is their high computational cost, as they necessitate the recalculation of control algorithms at each time step. Therefore, in intricate underwater environments, particularly those that necessitate immediate reactions, the substantial computing complexity could potentially undermine real-time efficacy.
- The effectiveness of NMPC approaches is contingent upon the precision of the system dynamics models. Nevertheless, the dynamics of underwater environments can be impacted by various factors, including water flow and turbulence. The task of guaranteeing the precision of the model presents a formidable challenge, thus impacting the efficacy of NMPC.
- One limitation of NMPC methods is their inadequate adaptability to complex underwater environments. In situations characterized by extreme conditions or high complexity, these methods may struggle to effectively respond to various scenarios, particularly when faced with unfamiliar obstacles or rapidly changing conditions. Consequently, this can result in a decline in the performance of the NMPC algorithm.
5.2. Future Research Directions
- Future research endeavors may prioritize the refinement of NMPC algorithms, with a particular emphasis on augmenting computational efficiency, mitigating reliance on model correctness, and optimizing control parameters to effectively accommodate intricate underwater settings.
- Multi-Model Fusion: The integration of diverse sensor data and distinct control models is employed to raise the flexibility of the system to environmental variations, thus augmenting the system’s robustness.
- The proposed approach involves the integration of deep learning techniques with adaptive control methods, allowing the robotic fish to autonomously modify control strategies by leveraging learnt environmental patterns. This integration aims to enhance the adaptability of the robotic fish in complicated situations.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Wu, Y.T. Application and Prospect of Unmanned Underwater Vehicle. Bull. Chin. Acad. Sci. 2022, 37, 910–920. [Google Scholar]
- Topini, E.; Liverani, G.; Gelli, J.; Fredducci, C.; Topini, A.; Ridolfi, A.; Allotta, B. Development and Control of an Autonomous Reconfigurable Underwater Vehicle. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Hu, X.Y.; Cai, Z.Y.; Zuo, K.W.; Zhan, R.P.; Guo, P.F. Research Progress of Motion and Path Planning Algorithm for Machine Fish Movement. Ship Eng. 2022, 44, 455–458. [Google Scholar]
- Zhong, J.; Zhao, C.; Chen, Y.F. Mechanism Design of a Bionic Robotic Fish. In Proceedings of the 2018 International Conference on Electrical, Control, Automation and Robotics (ECAR), Xiamen, China, 16–17 September 2018; Volume 307, pp. 168–171. [Google Scholar]
- Liang, J.J.; Huang, W.K.; Zhou, F.B.; Liang, J.Q.; Lin, G.J.; Xiao, E.D.; Li, H.Q.; Zhang, X.L. Double-Loop PID-Type Neural Network Sliding Mode Control of an Uncertain Autonomous Underwater Vehicle Model Based on a Nonlinear High-Order Observer with Unknown Disturbance. Mathematics 2022, 10, 3332. [Google Scholar] [CrossRef]
- Zhang, J.L.; Xiang, X.B.; Yang, S.L.; Zhang, Q. RBF-based supervisor path following control for ASV with time-varying ocean disturbance. Indian J. Geo-Mar. Sci. 2019, 48, 1028–1036. [Google Scholar]
- Khalaji, A.K.; Bahrami, S. Finite-time sliding mode control of underwater vehicles in 3D space. Trans. Inst. Meas. Control 2022, 44, 3215–3228. [Google Scholar] [CrossRef]
- Tabataba’I-Nasab, F.S.; Moosavian, S.A.A.; Khalaji, A.K. Tracking Control of an Autonomous Underwater Vehicle: Higher-Order Sliding Mode Control Approach. In Proceedings of the 2019 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019; pp. 114–119. [Google Scholar]
- Zarkasi, A.; Malik, R.F.; Ravi, M.; Yudi, E.; Angkotasan, I.; Zulfahmi, R. Artificial Intelligence in Underwater Robot Navigation Using Sonar Sensors with Fuzzy Logic Method. In Proceedings of the 2019 International Conference on Informatics, Multimedia, Cyber and Information System (ICIMCIS), Jakarta, Indonesia, 24–25 October 2019; pp. 207–211. [Google Scholar]
- Guo, J.; Li, C.; Guo, S. Path Optimization Method for the Spherical Underwater Robot in Unknown Environment. J. Bionic Eng. 2020, 17, 944–958. [Google Scholar] [CrossRef]
- Liu, Z.M.; Zhou, X.Z. Trajectory Tracking Control of Underwater Robots Based on Neural Network Backstepping Method. In Proceedings of the 2022 International Conference on Computing, Robotics and System Sciences (ICRSS), Macau, China, 19–21 December 2022; pp. 24–28. [Google Scholar]
- He, Y.; Zhu, L.; Sun, G.; Dong, M. Underwater autonomous motion control of a small-scaled spherical robot with neural networks. Microsyst. Technol. 2018, 25, 1297–1309. [Google Scholar] [CrossRef]
- Feng, Y.B.; Yu, Y.; Du, X.L. Research on Trajectory Tracking Control Algorithm for Semi-submersible Unmanned Surface Vehicle. J. Shenyang Ligong Univ. 2020, 39, 59–63. [Google Scholar]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A.; Campos, E. Saturation based nonlinear PID control for underwater vehicles: Design, stability analysis and experiments. Mechatronics 2019, 61, 96–105. [Google Scholar] [CrossRef]
- Luo, Y.H.; Wu, J.M.; Zhou, H.F. Trajectory tracking control of underwater vehicle based on hydrodynamic parameters calculated by CFD. Chin. J. Ship Res. 2022, 17, 237–245+272. [Google Scholar]
- Ma, C.; Liu, Y.C. Fixed-Time Sliding-Mode Reaching Based Trajectory Tracking Control of Unmanned Underwater Vehicles. In Proceedings of the 2018 3rd International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Huhhot, China, 14–16 September 2018; pp. 316–321. [Google Scholar]
- Yin, J.; Wang, N. Predictive Trajectory Tracking Control of Autonomous Underwater Vehicles Based on Variable Fuzzy Predictor. Int. J. Fuzzy Syst. 2020, 23, 1809–1822. [Google Scholar] [CrossRef]
- Zhu, D.; Yang, S.X.; Biglarbegian, M. A Fuzzy Logic-based Cascade Control without Actuator Saturation for the Unmanned Underwater Vehicle Trajectory Tracking. J. Intell. Robot. Syst. 2022, 106, 106. [Google Scholar] [CrossRef]
- Cao, J.; Sun, Y.S.; Zhang, G.C.; Jiao, W.L.; Wang, X.B.; Liu, Z.H. Target tracking control of underactuated autonomous underwater vehicle based on adaptive nonsingular terminal sliding mode control. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420919941. [Google Scholar] [CrossRef]
- Muñoz, F.; Cervantes-Rojas, J.S.; Valdovinos, J.M.; Sandre-Hernández, O.; Salazar, S.; Romero, H. Dynamic Neural Network-Based Adaptive Tracking Control for an Autonomous Underwater Vehicle Subject to Modeling and Parametric Uncertainties. Appl. Sci. 2021, 11, 2797. [Google Scholar] [CrossRef]
- Sun, Q.P.; Li, M.; Cheng, J.; Wang, Z.H.; Liu, B.; Tai, J.X. Path tracking control of wheeled mobile robot based on improved pure pursuit algorithm. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 4239–4244. [Google Scholar]
- Horvath, E.; Hajdu, C.; Koros, P. Novel Pure-Pursuit Trajectory Following Approaches and their Practical Applications. In Proceedings of the 2019 10th IEEE International Conference on Cognitive Infocommunications (CogInfoCom), Naples, Italy, 23–25 October 2019; pp. 597–601. [Google Scholar]
- Li, C.Y.; Guo, S.X.; Guo, J. Study on Obstacle Avoidance Strategy Using Multiple Ultrasonic Sensors for Spherical Underwater Robots. IEEE Sens. J. 2022, 22, 24458–24470. [Google Scholar] [CrossRef]
- Yang, H.; Fan, X.; Shi, P.; Hua, C. Nonlinear Control for Tracking and Obstacle Avoidance of a Wheeled Mobile Robot with Nonholonomic Constraint. IEEE Trans. Control Syst. Technol. 2015, 24, 741–746. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, W.; Zhao, Y.Q.; Wang, H.; Lin, F.; Cai, Y. Personalized Motion Planning and Tracking Control for Autonomous Vehicles Obstacle Avoidance. IEEE Trans. Veh. Technol. 2022, 71, 4733–4747. [Google Scholar] [CrossRef]
- Xiang, L.; Li, X.; Liu, H.; Li, P. Parameter Fuzzy Self-Adaptive Dynamic Window Approach for Local Path Planning of Wheeled Robot. IEEE Open J. Intell. Transp. Syst. 2022, 3, 1–6. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Y.X.; Wu, S.H.; Chen, T.L. Underwater Path Planning of UUV Based on UDWA. In Proceedings of the 2022 IEEE International Conference on Dependable, Autonomic and Secure Computing, International Conference on Pervasive Intelligence and Computing, International Conference on Cloud and Big Data Computing, International Conference on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), Falerna, Italy, 12–15 September 2022; pp. 992–995. [Google Scholar]
- Mei, M.; Zhu, D.Q.; Gan, W.Y.; Jiang, X.D. The Tracking Control of Unmanned Underwater Vehicles Based on Model Predictive Control. Control Eng. China 2019, 26, 1917–1924. [Google Scholar]
- Koca, G.O.; Bal, C.; Korkmaz, D.; Bingol, M.C.; Ay, M.; Akpolat, Z.H.; Yetkin, S. Three-Dimensional Modeling of a Robotic Fish Based on Real Carp Locomotion. Appl. Sci. 2018, 8, 180. [Google Scholar] [CrossRef]
- Qiao, D.H.; Zhong, Z.D.; Zhang, H.B.; Zhao, Y. Obstacle Avoidance Path Planning for Sin Degrees of Freedom Manipulator Based on NMPC Algorithm. Mach. Tool Hydraul. 2022, 50, 48–53. [Google Scholar]
- Zhang, W.; Wang, Q.; Wu, W.; Du, X.; Zhang, Y.; Han, P. Event-trigger NMPC for 3-D trajectory tracking of UUV with external disturbances. Ocean Eng. 2023, 283, 115050. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wang, M.; Zhang, Y.; Zhao, Q.; Zheng, X.; Gao, H. Trajectory Tracking and Obstacle Avoidance of Robotic Fish Based on Nonlinear Model Predictive Control. Biomimetics 2023, 8, 529. https://doi.org/10.3390/biomimetics8070529
Wang R, Wang M, Zhang Y, Zhao Q, Zheng X, Gao H. Trajectory Tracking and Obstacle Avoidance of Robotic Fish Based on Nonlinear Model Predictive Control. Biomimetics. 2023; 8(7):529. https://doi.org/10.3390/biomimetics8070529
Chicago/Turabian StyleWang, Ruilong, Ming Wang, Yiyang Zhang, Qianchuan Zhao, Xuehan Zheng, and He Gao. 2023. "Trajectory Tracking and Obstacle Avoidance of Robotic Fish Based on Nonlinear Model Predictive Control" Biomimetics 8, no. 7: 529. https://doi.org/10.3390/biomimetics8070529
APA StyleWang, R., Wang, M., Zhang, Y., Zhao, Q., Zheng, X., & Gao, H. (2023). Trajectory Tracking and Obstacle Avoidance of Robotic Fish Based on Nonlinear Model Predictive Control. Biomimetics, 8(7), 529. https://doi.org/10.3390/biomimetics8070529