
EAB-BES: A Global Optimization Approach for Efficient UAV Path Planning in High-Density Urban Environments


Abstract
1. Introduction
- Developed a specialized 3D UAV path planning model addressing collision avoidance and navigation efficiency among mixed-height urban obstacles.
- Proposed the EAB-BES algorithm, integrating elite opposition-based learning, adaptive weighting, and block-based elite-guided differential mutation to enhance BES’s convergence speed, accuracy, and adaptability.
- Introduced a novel block-based elite-guided differential mutation strategy for dynamically refining population subgroups, improving local optima escape ability and path robustness.
- Validated the performance of EAB-BES through comparative experiments with 9 state-of-the-art algorithms in six high-density urban scenarios.
2. Related Work
3. Preliminary
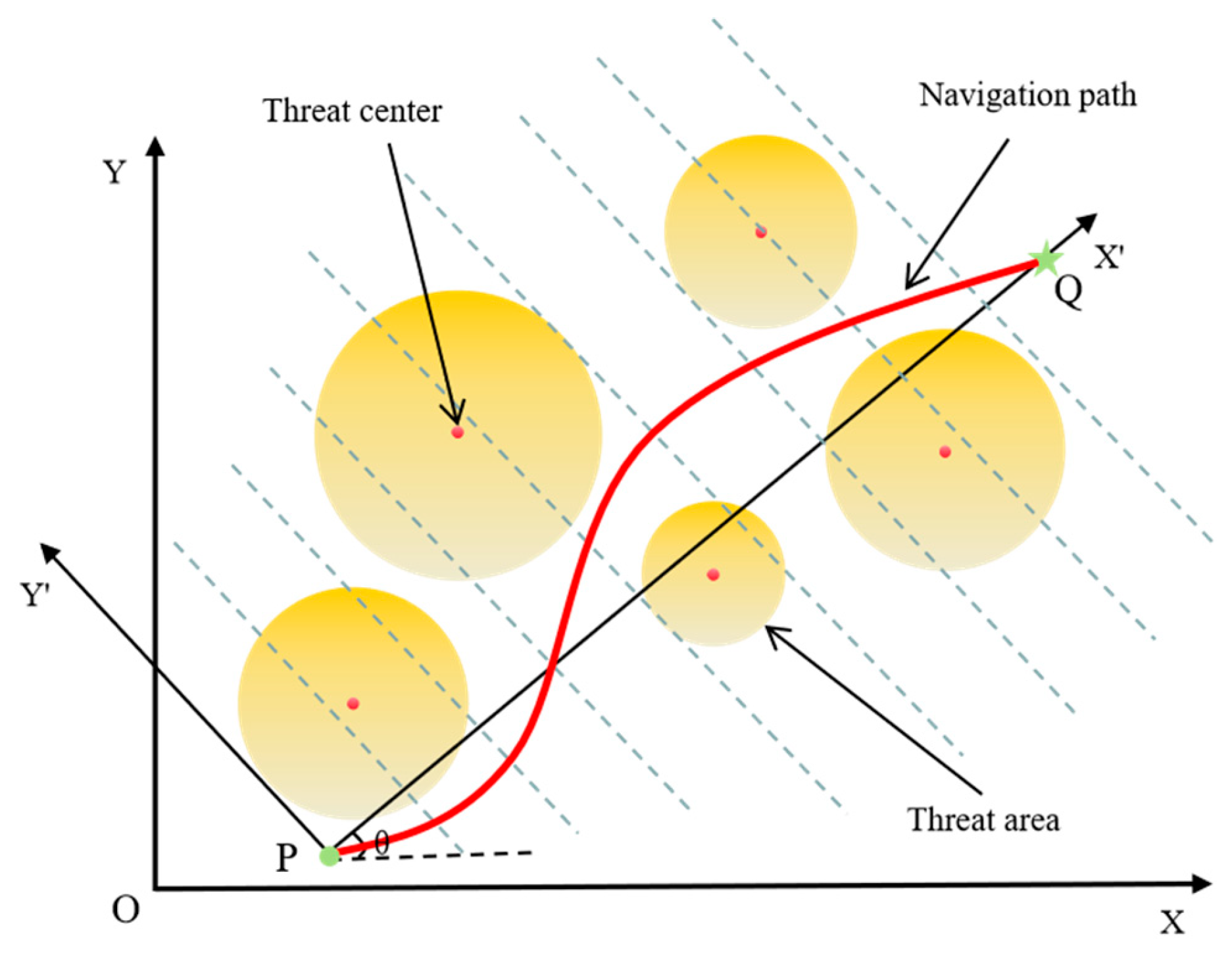
3.1. Path Planning for UAV
- (1)
- Path Length Cost ()
- (2)
- Flight Height Cost ()
- (3)
- Threat Cost ()
3.2. Bald Eagle Search Algorithm
| Algorithm 1: The pseudo-code of BES |
| Input: N (population size), D (dimension), Maxiter (Maximum number of iterations), up, lb (upper and lower bounds) 1. Randomly generated initial point 2. Evaluate the fitness values 3. while (t < Max_iter) 4. for i = 1 to N Select stage 5. Update individual position by Equation (15) Search stage 6. Update individual position by Equation (16) Swooping stage 7. Update individual position by Equation (20) 8. end for 9. end while 10. Output: the optimal solution |
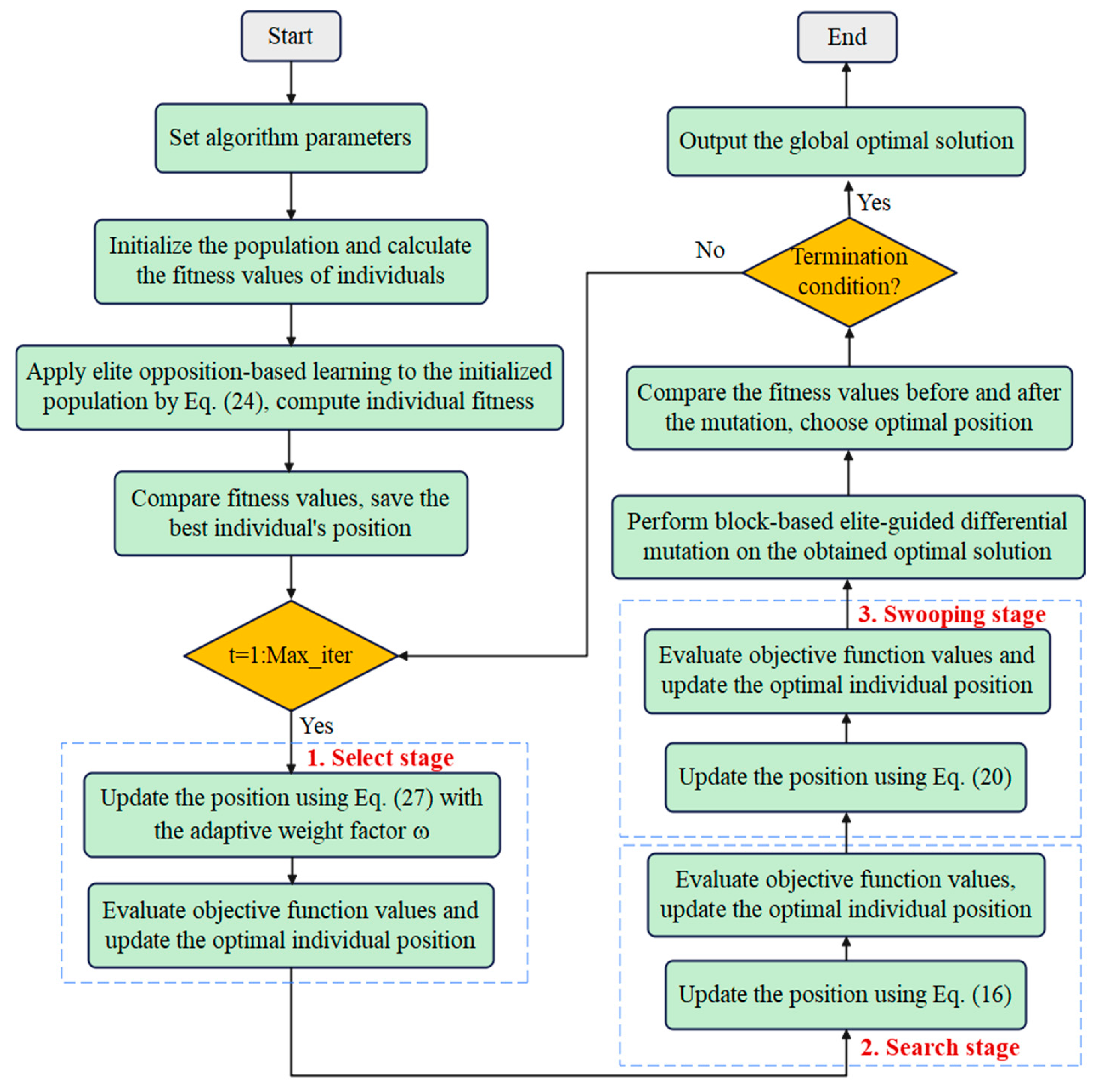
4. Proposed EAB-BES Algorithm
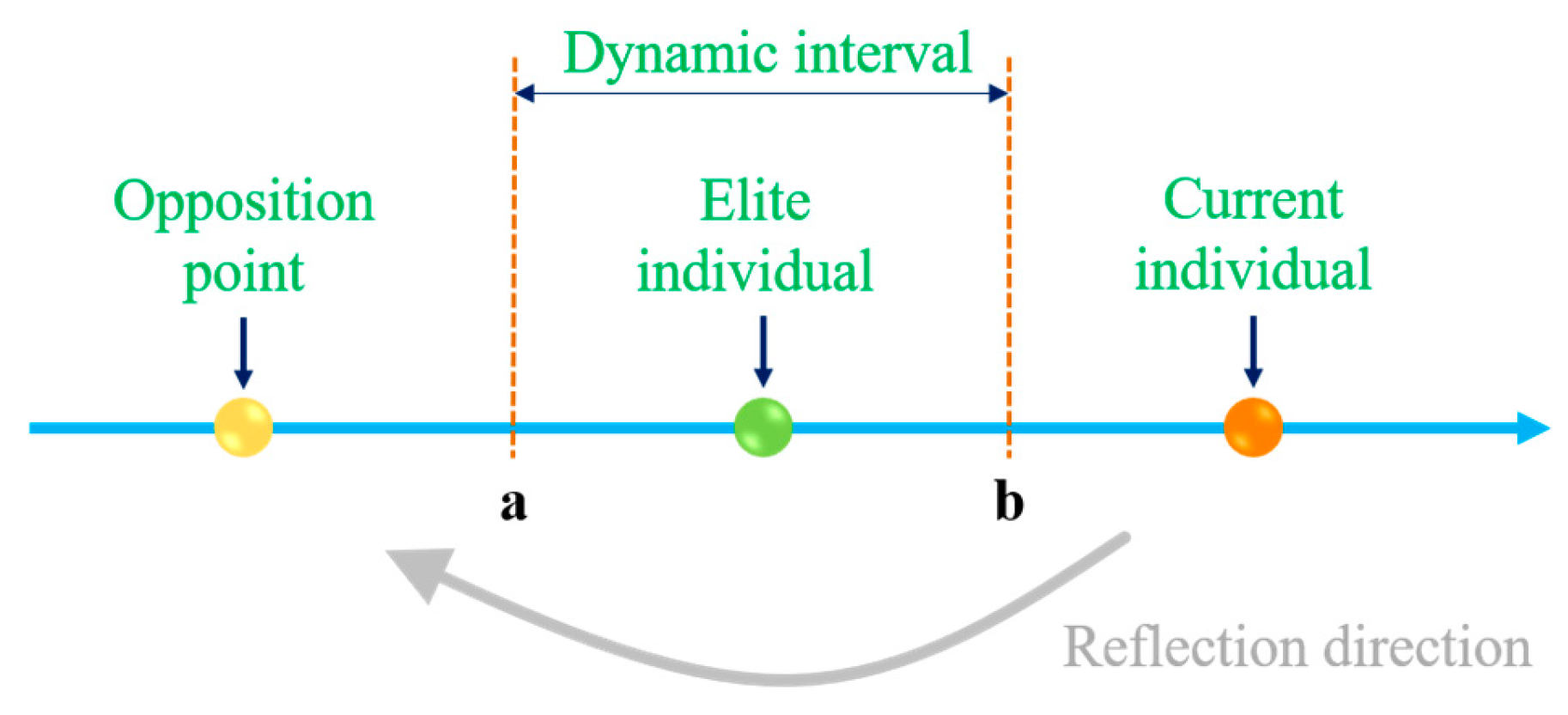
4.1. Elite Opposition-Based Learning Strategy
- (1)
- Selection of the elite group: Select the top 10% of individuals with the optimal fitness from the current population as the elite group.
- (2)
- Definition of the dynamic interval: Determine the dynamic boundaries according to the distribution of the elite group in the j-th dimension. is the minimum value of the elite group in the j-th dimension, and is the maximum value of the elite group in the j-th dimension.
- (3)
- Generation of opposition solutions: Combined with the random scaling coefficient , the mathematical expression of the opposition solution is
4.2. Adaptive Weight Mechanism
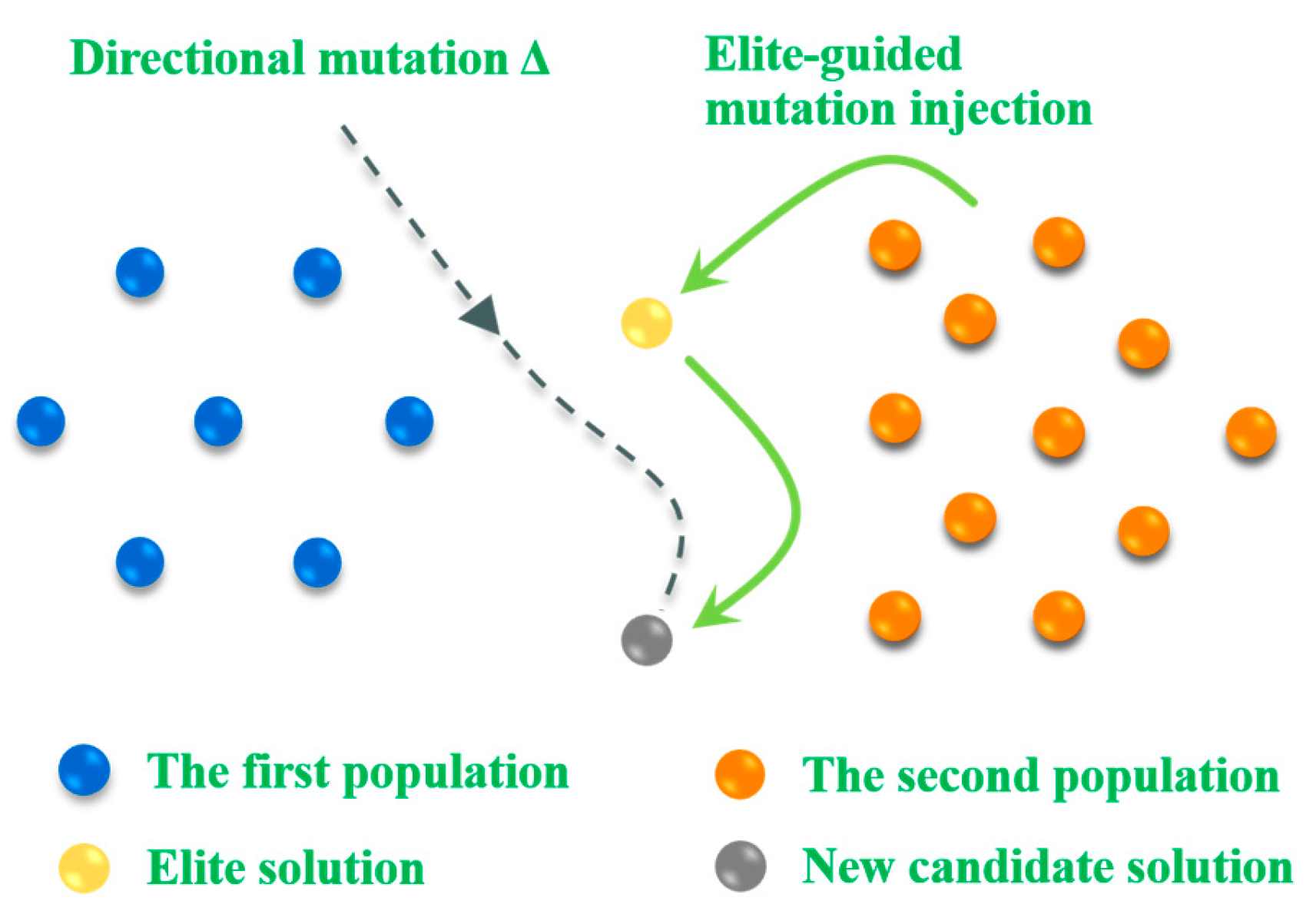
4.3. Block-Based Elite-Guided Differential Mutation Strategy
- (1)
- Dynamic blocking mechanism
- (2)
- Generation of differential perturbation
- (3)
- Elite-guided mutation injection
| Algorithm 2: The pseudo-code of EAB-BES |
| Input: N (population size), D (dimension), Max_iter (max iterations), up, lb (bounds) 1. Initialize population randomly and calculate fitness 2. Apply elite opposition-based learning on individual population by Equation (24) and calculate new 3. Update with better individuals Compare the fitness values before and after optimization, select the individual position with the best fitness value as the optimal position. 4. while (t ≤ Max_iter) 5. Update adaptive weight by Equation (26) 6. for i = 1 to N Select stage 7. Update individual position by Equation (27) Search stage 8. Update individual position by Equation (16) Swooping stage 9. Update individual position by Equation (20) 10. Apply a block-based elite-guided differential mutation strategy to the current optimal solution. 11. if 12. 13. end if 14. if 15. 16. end if 17. end for 18. t = t + 1 19. end while 20. Output |
4.4. Computational Complexity Analysis
5. Experimental Results and Discussion
5.1. Experimental Setup
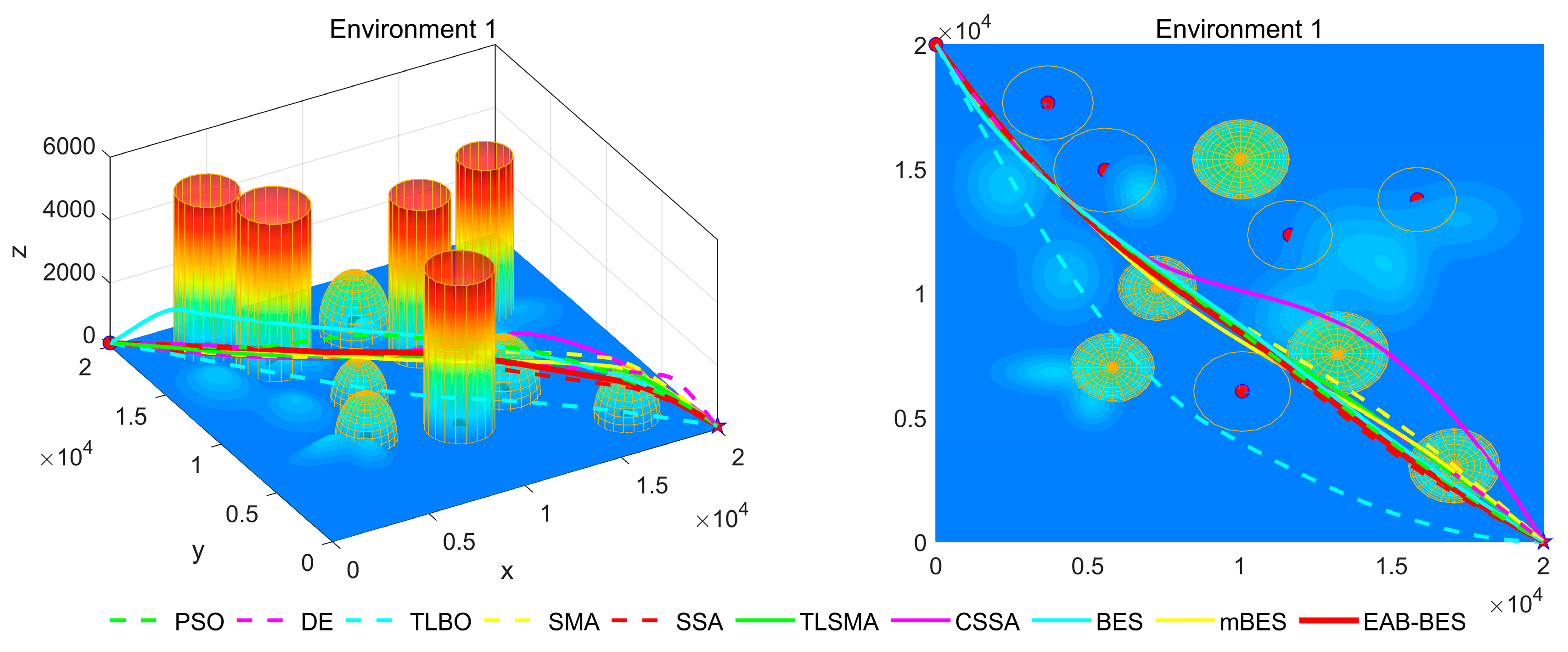
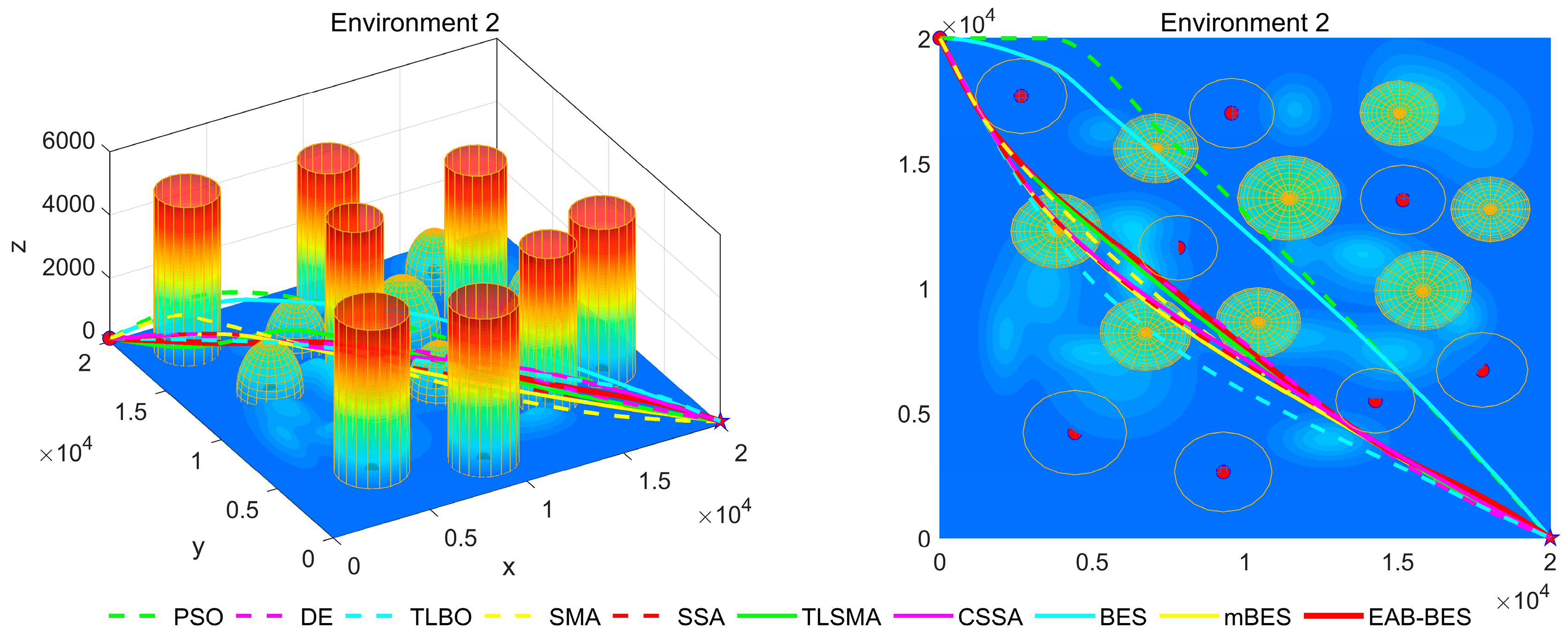
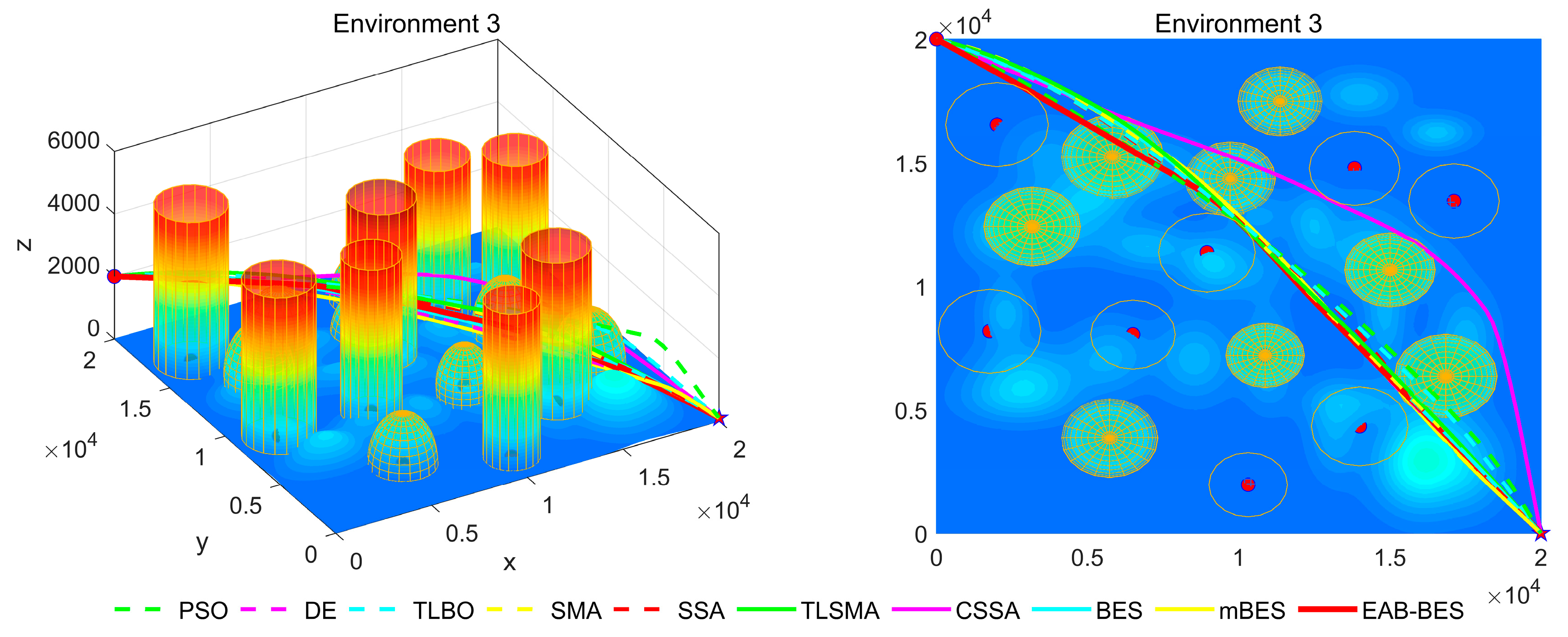
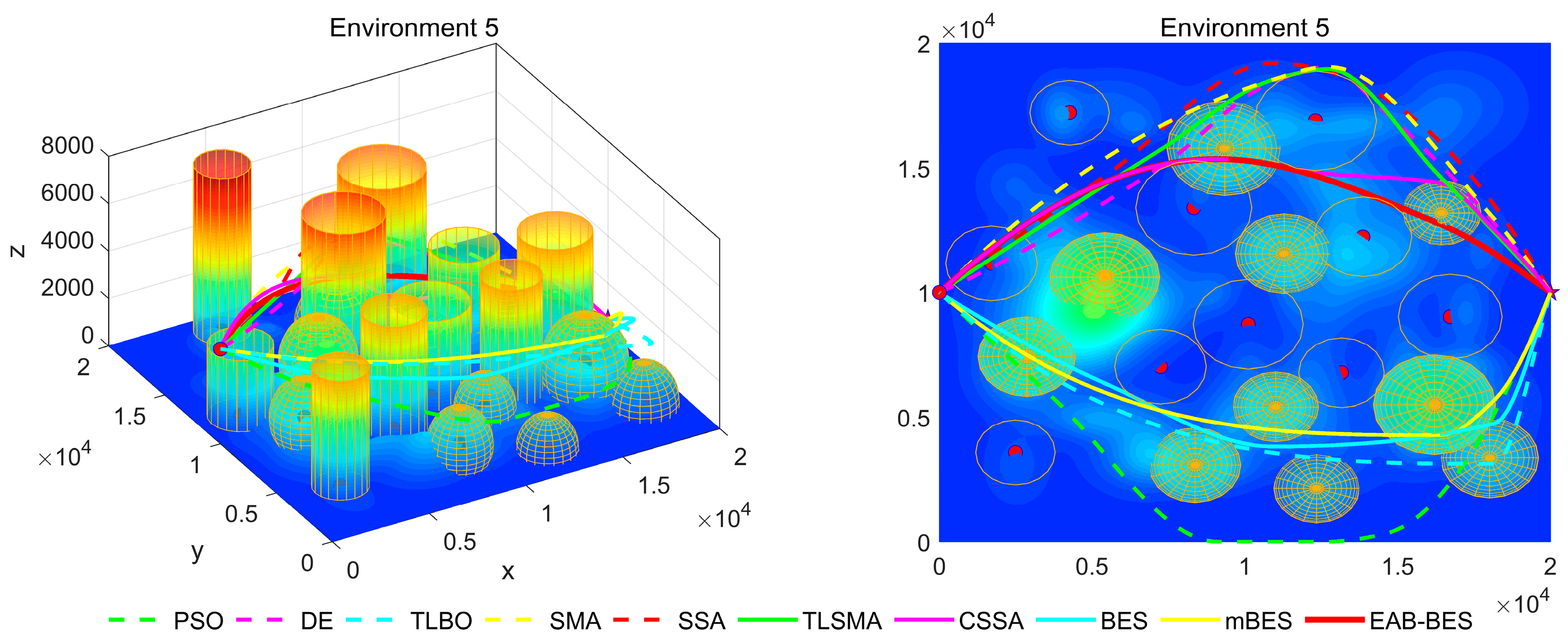
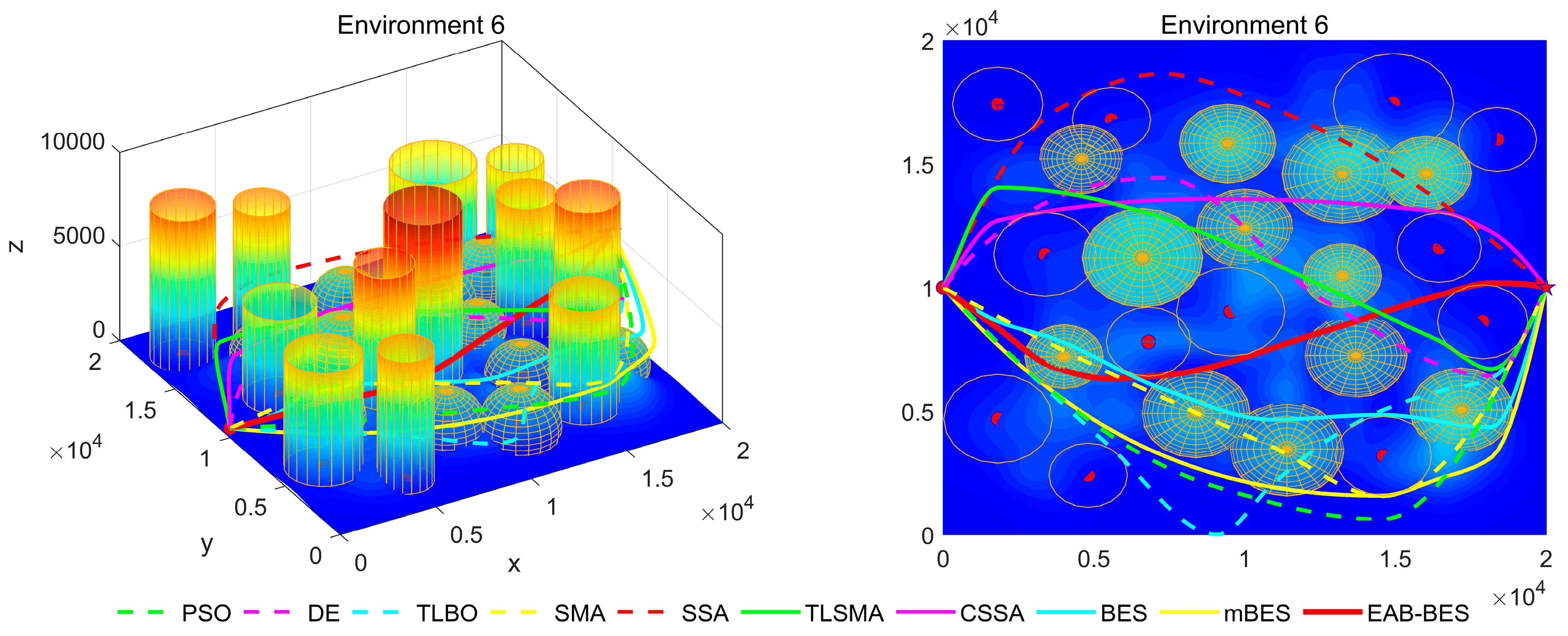
5.2. UAV Flight Environment Description
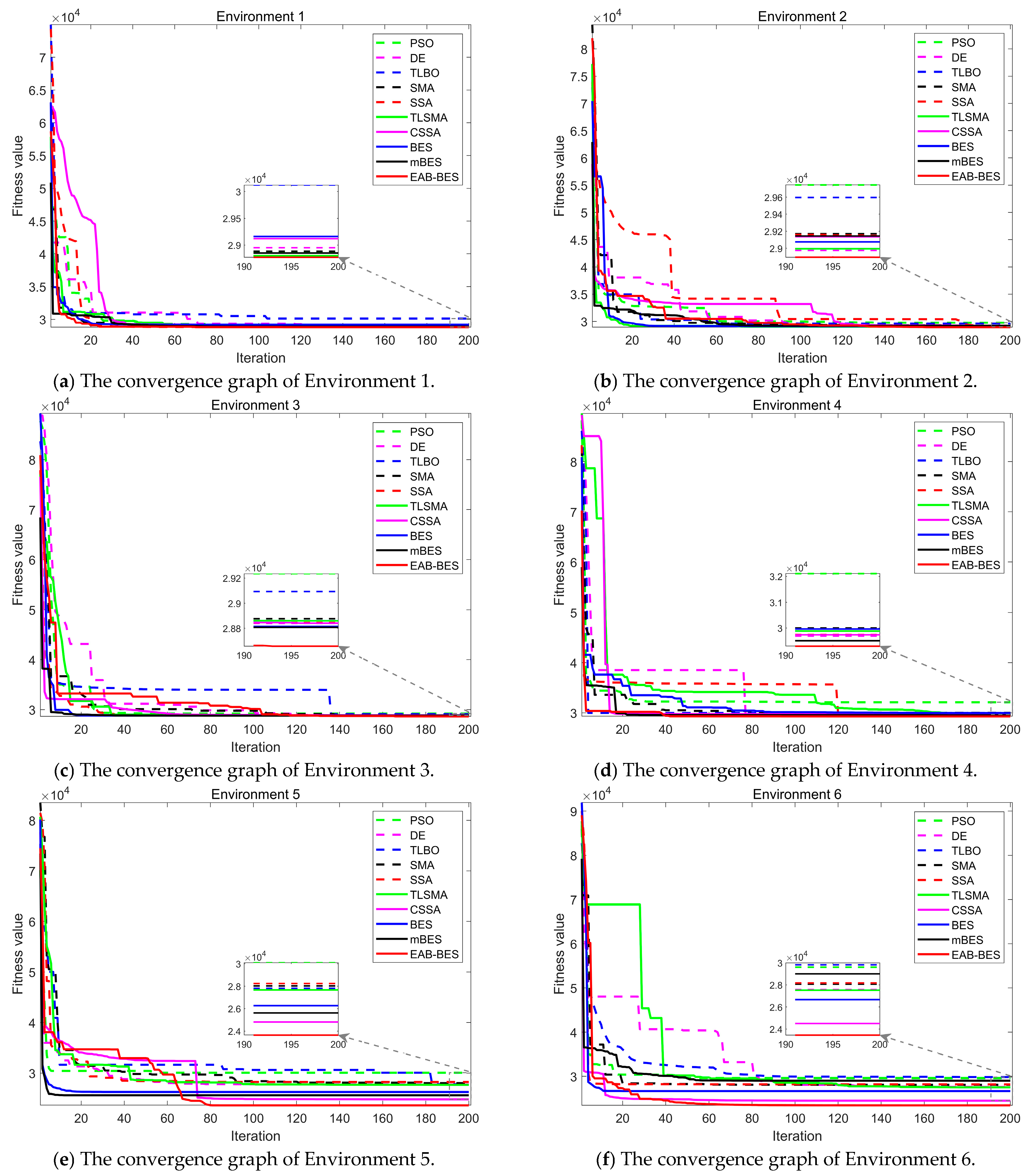
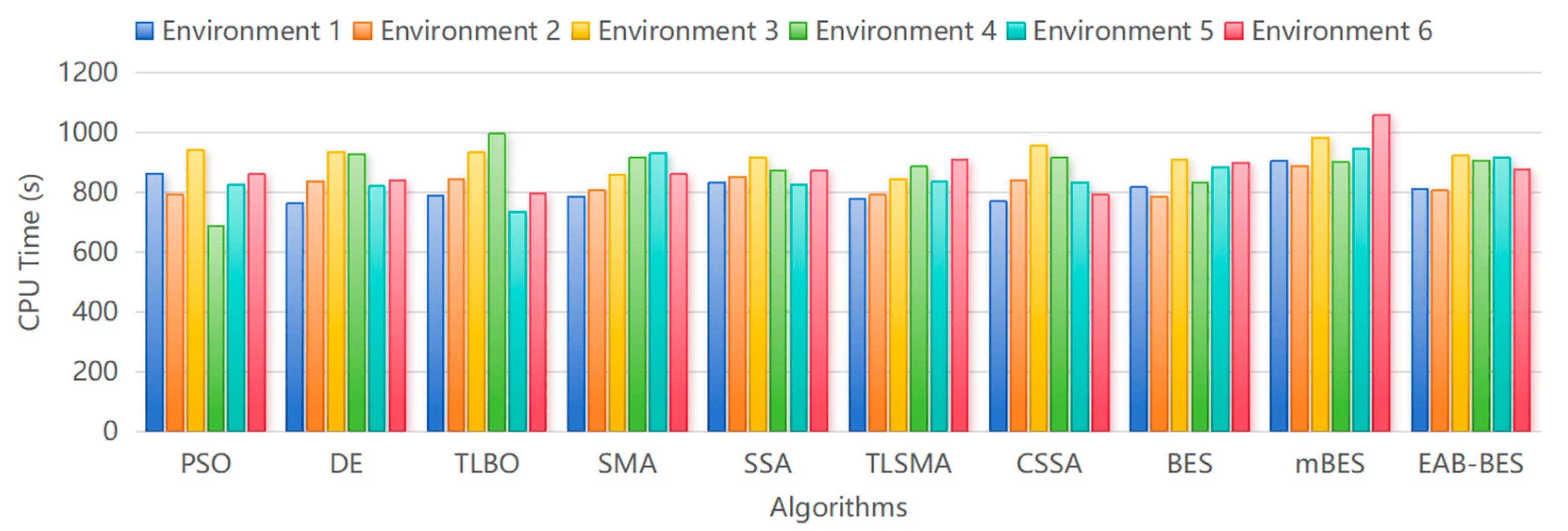
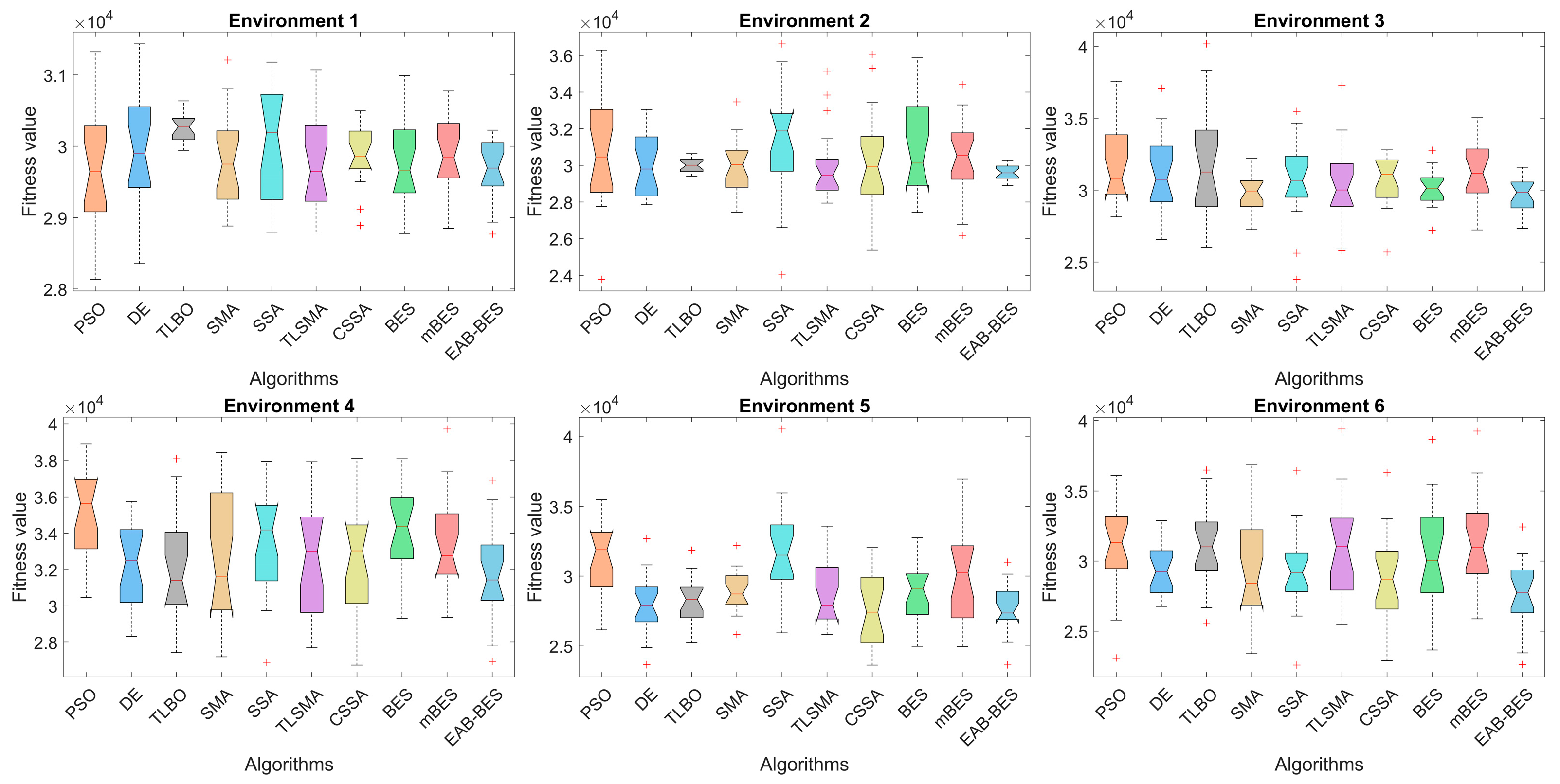
5.3. Analysis of Experimental Results
5.4. Statistical Hypothesis Test
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; He, N.; Hong, C.; Wang, Q.; Chen, M. Improved YOLOX-X based UAV aerial photography object detection algorithm. Image Vis. Comput. 2023, 135, 104697. [Google Scholar] [CrossRef]
- Fang, Z.; Savkin, A.V. Strategies for Optimized UAV Surveillance in Various Tasks and Scenarios: A Review. Drones 2024, 8, 193. [Google Scholar] [CrossRef]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pechoucek, M. Autonomous UAV surveillance in complex urban environments. In Proceedings of the 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology, Milan, Italy, 15–18 September 2009; Volume 2, pp. 82–85. [Google Scholar]
- Kirschstein, T. Comparison of energy demands of drone-based and ground-based parcel delivery services. Transp. Res. Part D Transp. Environ. 2020, 78, 102209. [Google Scholar] [CrossRef]
- Niyazi, M.; Behnamian, J. Application of Emerging Digital Technologies in Disaster Relief Operations: A Systematic Review. Arch. Comput. Methods Eng. 2023, 30, 1579–1599. [Google Scholar] [CrossRef]
- Khan, A.; Gupta, S.; Gupta, S.K. Emerging UAV technology for disaster detection, mitigation, response, and preparedness. J. Field Robot. 2022, 39, 905–955. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Chen, J.; Li, M.; Yuan, Z.; Gu, Q. An Improved A* Algorithm for UAV Path Planning Problems. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; Volume 1, pp. 958–962. [Google Scholar]
- Kothari, M.; Postlethwaite, I. A Probabilistically Robust Path Planning Algorithm for UAVs Using Rapidly-Exploring Random Trees. J. Intell. Robot. Syst. 2013, 71, 231–253. [Google Scholar] [CrossRef]
- Li, B.; Chen, B. An Adaptive Rapidly-Exploring Random Tree. IEEE/CAA J. Autom. Sin. 2022, 9, 283–294. [Google Scholar] [CrossRef]
- Hsu, D.; Latombe, J.-C.; Kurniawati, H. On the Probabilistic Foundations of Probabilistic Roadmap Planning. Int. J. Robot. Res. 2006, 25, 627–643. [Google Scholar] [CrossRef]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems; Carbone, G., Gomez-Bravo, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 29, pp. 3–27. ISBN 978-3-319-14704-8. [Google Scholar]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of Robot 3D Path Planning Algorithms. J. Control Sci. Eng. 2016, 2016, 1–22. [Google Scholar] [CrossRef]
- Raj, A.; Ahuja, K.; Busnel, Y. AI algorithm for predicting and optimizing trajectory of massive UAV swarm. Robot. Auton. Syst. 2025, 186, 104910. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. Three-dimensional UCAV path planning using a novel modified artificial ecosystem optimizer. Expert Syst. Appl. 2023, 217, 119499. [Google Scholar] [CrossRef]
- Yahia, H.S.; Mohammed, A.S. Path planning optimization in unmanned aerial vehicles using meta-heuristic algorithms: A systematic review. Environ. Monit. Assess. 2023, 195, 30. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, S.; Zhou, C.; Yan, S.; Xue, J. Human memory optimization algorithm: A memory-inspired optimizer for global optimization problems. Expert Syst. Appl. 2024, 237, 121597. [Google Scholar] [CrossRef]
- Yin, S.; Xiang, Z. A hyper-heuristic algorithm via proximal policy optimization for multi-objective truss problems. Expert Syst. Appl. 2024, 256, 124929. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Optimization Algorithms; Academic Press: Cambridge, MA, USA, 2020; ISBN 0-12-821989-0. [Google Scholar]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Kim, M.-J.; Kang, T.Y.; Ryoo, C.-K. Real-Time Path Planning for Unmanned Aerial Vehicles Based on Compensated Voronoi Diagram. Int. J. Aeronaut. Space Sci. 2025, 26, 235–244. [Google Scholar] [CrossRef]
- Ergezer, H.; Leblebicioglu, K. Path Planning for UAVs for Maximum Information Collection. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 502–520. [Google Scholar] [CrossRef]
- Jayaweera, H.M.P.C.; Hanoun, S. Path Planning of Unmanned Aerial Vehicles (UAVs) in Windy Environments. Drones 2022, 6, 101. [Google Scholar] [CrossRef]
- Ikram, M.; Sroufe, R. A novel sequential block path planning method for 3D unmanned aerial vehicle routing in sustainable supply chains. Supply Chain. Anal. 2025, 9, 100094. [Google Scholar] [CrossRef]
- Fahmani, L.; Benhadou, S. Optimizing 2D path planning for unmanned aerial vehicle inspection of electric transmission lines. Sci. Afr. 2024, 24, e02203. [Google Scholar] [CrossRef]
- Pamarthi, V.; Agrawal, R. Unmanned aerial vehicle path planning with hybrid motion algorithm for obstacle avoidance. Meas. Sens. 2024, 36, 101195. [Google Scholar] [CrossRef]
- Chan, Y.Y.; Ng, K.K.H.; Lee, C.K.M.; Hsu, L.-T.; Keung, K.L. Wind dynamic and energy-efficiency path planning for unmanned aerial vehicles in the lower-level airspace and urban air mobility context. Sustain. Energy Technol. Assess. 2023, 57, 103202. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A Modified Sparrow Search Algorithm with Application in 3d Route Planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef]
- Zhao, R.; Wang, Y.; Xiao, G.; Liu, C.; Hu, P.; Li, H. A method of path planning for unmanned aerial vehicle based on the hybrid of selfish herd optimizer and particle swarm optimizer. Appl. Intell. 2022, 52, 16775–16798. [Google Scholar] [CrossRef]
- Wang, X.; Pan, J.-S.; Yang, Q.; Kong, L.; Snášel, V.; Chu, S.-C. Modified Mayfly Algorithm for UAV Path Planning. Drones 2022, 6, 134. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K. Goal distance-based UAV path planning approach, path optimization and learning-based path estimation: GDRRT*, PSO-GDRRT* and BiLSTM-PSO-GDRRT*. Appl. Soft Comput. 2023, 137, 110156. [Google Scholar] [CrossRef]
- Yin, S.; Wang, R.; Xiang, Y.; Xiang, Z. Adaptive differential evolution for collaborative path planning of multiple unmanned aerial vehicles. In Proceedings of the 2024 36th Chinese Control and Decision Conference (CCDC), Xi’an, China, 25–27 May 2024; pp. 1521–1526. [Google Scholar]
- Wang, M.; Yuan, P.; Hu, P.; Yang, Z.; Ke, S.; Huang, L.; Zhang, P. Multi-Strategy Improved Red-Tailed Hawk Algorithm for Real-Environment Unmanned Aerial Vehicle Path Planning. Biomimetics 2025, 10, 31. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Wang, Y. Cross-regional path planning based on improved Q-learning with dynamic exploration factor and heuristic reward value. Expert Syst. Appl. 2025, 260, 125388. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, Y.; Chen, W. Multi-strategy ensemble wind driven optimization algorithm for robot path planning. Math. Comput. Simul. 2025, 231, 144–159. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, S.; Wang, Z.; Xia, X.; Duan, Y. An Improved Human Evolution Optimization Algorithm for Unmanned Aerial Vehicle 3D Trajectory Planning. Biomimetics 2025, 10, 23. [Google Scholar] [CrossRef]
- Yin, S.; Xu, N.; Shi, Z.; Xiang, Z. Collaborative path planning of multi-unmanned surface vehicles via multi-stage constrained multi-objective optimization. Adv. Eng. Inform. 2025, 65, 103115. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Y.; Zhou, G.; Luo, Q. An effective multi-objective bald eagle search algorithm for solving engineering design problems. Appl. Soft Comput. 2023, 145, 110585. [Google Scholar] [CrossRef]
- Zheng, R.; Li, R.; Hussien, A.G.; Hamad, Q.S.; Al-Betar, M.A.; Che, Y.; Wen, H. A multi-strategy boosted bald eagle search algorithm for global optimization and constrained engineering problems: Case study on MLP classification problems. Artif. Intell. Rev. 2024, 58, 18. [Google Scholar] [CrossRef]
- Zhang, D.; Liang, X.; Cao, Y.; Zhang, M.; Xiao, D. Adaptive bald eagle search algorithm with elite swarm guiding and population memory crossover. Int. J. Bio-Inspired Comput. 2024, 24, 133–149. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Y.; Zhou, G.; Luo, Q.; Zhu, B. A Curve Approximation Approach Using Bio-inspired Polar Coordinate Bald Eagle Search Algorithm. Int. J. Comput. Intell. Syst. 2022, 15, 30. [Google Scholar] [CrossRef]
- Sayed, G.I.; Soliman, M.M.; Hassanien, A.E. A novel melanoma prediction model for imbalanced data using optimized SqueezeNet by bald eagle search optimization. Comput. Biol. Med. 2021, 136, 104712. [Google Scholar] [CrossRef]
- Almashhadani, H.A.; Deng, X.; Latif, S.N.A.; Ibrahim, M.M.; AL-hwaidi, O.H.R. Deploying an efficient and reliable scheduling for mobile edge computing for IoT applications. Mater. Today Proc. 2023, 80, 2850–2857. [Google Scholar] [CrossRef]
- Nassef, A.M.; Fathy, A.; Rezk, H.; Yousri, D. Optimal parameter identification of supercapacitor model using bald eagle search optimization algorithm. J. Energy Storage 2022, 50, 104603. [Google Scholar] [CrossRef]
- Algarni, A.D.; Alturki, N.; Soliman, N.F.; Abdel-Khalek, S.; Mousa, A.A.A. An Improved Bald Eagle Search Algorithm with Deep Learning Model for Forest Fire Detection Using Hyperspectral Remote Sensing Images. Can. J. Remote Sens. 2022, 48, 609–620. [Google Scholar] [CrossRef]
- Alsubai, S.; Hamdi, M.; Abdel-Khalek, S.; Alqahtani, A.; Binbusayyis, A.; Mansour, R.F. Bald eagle search optimization with deep transfer learning enabled age-invariant face recognition model. Image Vis. Comput. 2022, 126, 104545. [Google Scholar] [CrossRef]
- Elsisi, M.; Essa, M.E.-S.M. Improved bald eagle search algorithm with dimension learning-based hunting for autonomous vehicle including vision dynamics. Appl. Intell. 2023, 53, 11997–12014. [Google Scholar] [CrossRef]
- Dian, S.; Zhong, J.; Guo, B.; Liu, J.; Guo, R. A smooth path planning method for mobile robot using a BES-incorporated modified QPSO algorithm. Expert Syst. Appl. 2022, 208, 118256. [Google Scholar] [CrossRef]
- Wang, W.-C.; Tian, W.-C.; Chau, K.-W.; Zang, H. MSBES: An improved bald eagle search algorithm with multi- strategy fusion for engineering design and water management problems. J. Supercomput. 2025, 81, 251. [Google Scholar] [CrossRef]
- Alabdan, R.; Alabduallah, B.; Alruwais, N.; Arasi, M.A.; Asklany, S.A.; Alghushairy, O.; Alallah, F.S.; Alshareef, A. Blockchain-assisted improved interval type-2 fuzzy deep learning-based attack detection on internet of things driven consumer electronics. Alex. Eng. J. 2025, 110, 153–167. [Google Scholar] [CrossRef]
- Yildiz, B.S.; Pholdee, N.; Bureerat, S.; Yildiz, A.R.; Sait, S.M. Enhanced grasshopper optimization algorithm using elite opposition-based learning for solving real-world engineering problems. Eng. Comput. 2022, 38, 4207–4219. [Google Scholar] [CrossRef]
- Zhu, D.; Shen, J.; Zhang, Y.; Li, W.; Zhu, X.; Zhou, C.; Cheng, S.; Yao, Y. Multi-strategy particle swarm optimization with adaptive forgetting for base station layout. Swarm Evol. Comput. 2024, 91, 101737. [Google Scholar] [CrossRef]
- Yang, Q.; Yan, J.-Q.; Gao, X.-D.; Xu, D.-D.; Lu, Z.-Y.; Zhang, J. Random neighbor elite guided differential evolution for global numerical optimization. Inf. Sci. 2022, 607, 1408–1438. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the Proceedings of ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Zhong, C.; Li, G.; Meng, Z. A hybrid teaching–learning slime mould algorithm for global optimization and reliability-based design optimization problems. Neural Comput. Appl. 2022, 34, 16617–16642. [Google Scholar] [CrossRef]
- Zhang, C.; Ding, S. A stochastic configuration network based on chaotic sparrow search algorithm. Knowl.-Based Syst. 2021, 220, 106924. [Google Scholar] [CrossRef]
- Chhabra, A.; Hussien, A.G.; Hashim, F.A. Improved bald eagle search algorithm for global optimization and feature selection. Alex. Eng. J. 2023, 68, 141–180. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. An adaptive neighborhood-based search enhanced artificial ecosystem optimizer for UCAV path planning. Expert Syst. Appl. 2022, 208, 118047. [Google Scholar] [CrossRef]
- Yin, S.; Xiang, Z. Adaptive operator selection with dueling deep Q-network for evolutionary multi-objective optimization. Neurocomputing 2024, 581, 127491. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, S.; Zhou, C.; Yan, S. Manta ray foraging optimization based on mechanics game and progressive learning for multiple optimization problems. Appl. Soft Comput. 2023, 145, 110561. [Google Scholar] [CrossRef]
- Xu, N.; Shi, Z.; Yin, S.; Xiang, Z. A hyper-heuristic with deep Q-network for the multi-objective unmanned surface vehicles scheduling problem. Neurocomputing 2024, 596, 127943. [Google Scholar] [CrossRef]
- Xu, Z.; Zhan, X.; Chen, B.; Xiu, Y.; Yang, C.; Shimada, K. A real-time dynamic obstacle tracking and mapping system for UAV navigation and collision avoidance with an RGB-D camera. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 10645–10651. [Google Scholar]
- Hau, B.M.; You, S.-S.; Bao Long, L.N.; Kim, H.-S. Efficient routing for multiple AGVs in container terminals using hybrid deep learning and metaheuristic algorithm. Ain Shams Eng. J. 2025, 16, 103468. [Google Scholar] [CrossRef]
- Krůček, M.; Král, K.; Cushman, K.C.; Missarov, A.; Kellner, J.R. Supervised Segmentation of Ultra-High-Density Drone Lidar for Large-Area Mapping of Individual Trees. Remote Sens. 2020, 12, 3260. [Google Scholar] [CrossRef]
- Guo, H.; Wang, Y.; Liu, J.; Liu, C. Multi-UAV Cooperative Task Offloading and Resource Allocation in 5G Advanced and Beyond. IEEE Trans. Wirel. Commun. 2024, 23, 347–359. [Google Scholar] [CrossRef]
- Bayraktar, E.; Yigit, C.B.; Boyraz, P. A hybrid image dataset toward bridging the gap between real and simulation environments for robotics. Mach. Vis. Appl. 2019, 30, 23–40. [Google Scholar] [CrossRef]
- Bayraktar, E.; Korkmaz, B.N.; Erarslan, A.U.; Celebi, N. Traffic congestion-aware graph-based vehicle rerouting framework from aerial imagery. Eng. Appl. Artif. Intell. 2023, 119, 105769. [Google Scholar] [CrossRef]
- Bayraktar, E.; Basarkan, M.E.; Celebi, N. A low-cost UAV framework towards ornamental plant detection and counting in the wild. ISPRS J. Photogramm. Remote Sens. 2020, 167, 1–11. [Google Scholar] [CrossRef]
- Bayraktar, E.; Yigit, C.B. Conditional-pooling for improved data transmission. Pattern Recognit. 2024, 145, 109978. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Parameter Settings |
|---|---|
| PSO | , |
| DE | , |
| TLBO | , |
| SMA | |
| SSA | , , |
| TLSMA | , , |
| CSSA | , , , , , |
| BES | , , , , |
| mBES | , , , , |
| EAB-BES |
| Environments | Start Point | Goal Point | Position of High-Rise Buildings | Position of Low-Rise Buildings | ||
|---|---|---|---|---|---|---|
| Projection Coordinate | Height, Radius | Projection Coordinate | Radius | |||
| Environment 1 | (0, 20000, 100) | (20000, 0, 100) | (15845, 13757, 0) | 5000, 1300 | (7283, 10186, 0) | 1300 |
| (11655, 12328, 0) | 5000, 1400 | (5794, 6991, 0) | 1400 | |||
| (3683, 17649, 0) | 5000, 1500 | (17063, 3049, 0) | 1500 | |||
| (10083, 6039, 0) | 5000, 1600 | (10034, 15375, 0) | 1600 | |||
| (5567, 14937, 0) | 5000, 1700 | (13216, 7566, 0) | 1700 | |||
| Environment 2 | (0, 20000, 100) | (20000, 0, 100) | (14269, 5484, 0) | 5000, 1300 | (18038, 13163, 0) | 1300 |
| (15174, 13534, 0) | 5000, 1400 | (7064, 15587, 0) | 1400 | |||
| (2667, 17685, 0) | 5000, 1500 | (3823, 12278, 0) | 1500 | |||
| (9284, 2633, 0) | 5000, 1600 | (15831, 9895, 0) | 1600 | |||
| (4422, 4209, 0) | 5000, 1700 | (11449, 13609, 0) | 1700 | |||
| (7810, 11614, 0) | 5000, 1300 | (15061, 17010, 0) | 1300 | |||
| (9561, 17000, 0) | 5000, 1400 | (10435, 8614, 0) | 1400 | |||
| (17766, 6717, 0) | 5000, 1500 | (6732, 8174, 0) | 1500 | |||
| Environment 3 | (0, 20000, 2000) | (20000, 0, 100) | (10312, 1963, 0) | 5000, 1300 | (10874, 7195, 0) | 1300 |
| (6500, 8040, 0) | 5000, 1400 | (11371, 17484, 0) | 1400 | |||
| (13832, 14768, 0) | 5000, 1500 | (9714, 14344, 0) | 1500 | |||
| (8948, 11361, 0) | 5000, 1600 | (3164, 12413, 0) | 1600 | |||
| (2002, 16532, 0) | 5000, 1700 | (16851, 6353, 0) | 1700 | |||
| (17122, 13444, 0) | 5000, 1500 | (15003, 10659, 0) | 1500 | |||
| (14002, 4327, 0) | 5000, 1600 | (5727, 3857, 0) | 1600 | |||
| (1757, 8175, 0) | 5000, 1700 | (5818, 15221, 0) | 1700 | |||
| Environment 4 | (0, 20000, 100) | (20000, 0, 3000) | (9415, 7258, 0) | 6000, 1700 | (5301, 5310, 0) | 1300 |
| (7590, 3590, 0) | 5000, 1400 | (6504, 14073, 0) | 1400 | |||
| (6869, 10045, 0) | 5000, 1500 | (8681, 17245, 0) | 1500 | |||
| (13617, 5224, 0) | 6000, 1600 | (16878, 3426, 0) | 1600 | |||
| (17634, 12447, 0) | 5000, 1900 | (17673, 17059, 0) | 1700 | |||
| (17522, 7928, 0) | 4000, 1300 | (2560, 10564, 0) | 1800 | |||
| (2479, 6642, 0) | 5000, 1400 | (3405, 17190, 0) | 1900 | |||
| (10672, 10981, 0) | 5000, 1500 | (13778, 10590, 0) | 2000 | |||
| (1957, 13903, 0) | 5000, 1300 | (3204, 2153, 0) | 1600 | |||
| (11870, 15626, 0) | 3000, 1700 | (14819, 14020, 0) | 1300 | |||
| Environment 5 | (0, 10000, 4000) | (20000, 10000, 500) | (12307, 16887, 0) | 5000, 2000 | (18011, 3362, 0) | 1600 |
| (13862, 12235, 0) | 3000, 1600 | (12346, 2149, 0) | 1400 | |||
| (7236, 7024, 0) | 5000, 1500 | (11007, 5410, 0) | 1400 | |||
| (8325, 13398, 0) | 6000, 1900 | (5412, 10606, 0) | 1800 | |||
| (16720, 9031, 0) | 5000, 1700 | (8362, 3073, 0) | 1500 | |||
| (4259, 17214, 0) | 7000, 1300 | (11286, 11556, 0) | 1600 | |||
| (13161, 6781, 0) | 5000, 1400 | (2859, 7427, 0) | 1600 | |||
| (1705, 11170, 0) | 3000, 1500 | (9344, 15785, 0) | 1900 | |||
| (10107, 8725, 0) | 4000, 1800 | (16204, 5497, 0) | 2000 | |||
| (2487, 3581, 0) | 5000, 1300 | (16424, 13188, 0) | 1300 | |||
| Environment 6 | (0, 10000, 500) | (20000, 10000, 5000) | (18380, 15991, 0) | 6000, 1300 | (13683, 7254, 0) | 1700 |
| (6808, 7803, 0) | 7000, 1400 | (11402, 3462, 0) | 1900 | |||
| (1808, 17415, 0) | 8000, 1500 | (16021, 14619, 0) | 1500 | |||
| (14600, 3189, 0) | 6000, 1600 | (9434, 15827, 0) | 1600 | |||
| (3376, 11338, 0) | 5000, 1700 | (17182, 5046, 0) | 1700 | |||
| (9536, 9027, 0) | 9000, 1800 | (4004, 7203, 0) | 1300 | |||
| (4807, 2406, 0) | 7000, 1300 | (4586, 15201, 0) | 1400 | |||
| (16451, 11611, 0) | 7000, 1400 | (6609, 11204, 0) | 2000 | |||
| (14932, 17467, 0) | 6000, 2000 | (10002, 12396, 0) | 1600 | |||
| (17894, 8620, 0) | 8000, 1500 | (13238, 10476, 0) | 1300 | |||
| (5580, 16794, 0) | 7000, 1300 | (13236, 14589, 0) | 2000 | |||
| (1817, 4687, 0) | 6000, 1800 | (8378, 4910, 0) | 1800 | |||
| Environments | Indicators | PSO | DE | TLBO | SMA | SSA | TLSMA | CSSA | BES | mBES | EAB-BES |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Environment 1 | Best | 28869.11 | 28949.14 | 30123.47 | 28883.30 | 28795.45 | 28800.05 | 29118.29 | 29159.93 | 28850.08 | 28770.17 |
| Worst | 30469.13 | 30654.39 | 30634.86 | 30655.91 | 30563.58 | 30406.99 | 30225.88 | 30557.60 | 30406.79 | 30132.65 | |
| Mean | 29710.29 | 29982.09 | 30261.97 | 29808.36 | 30022.42 | 29742.09 | 29899.73 | 29755.62 | 29911.28 | 29700.06 | |
| Std | 817.64 | 776.74 | 195.30 | 640.50 | 746.99 | 610.83 | 377.84 | 594.27 | 455.77 | 352.08 | |
| Environment 2 | Best | 29743.19 | 28974.45 | 29595.99 | 29170.65 | 29150.50 | 28994.96 | 29133.76 | 29074.87 | 29143.47 | 28894.00 |
| Worst | 36292.54 | 33049.17 | 30575.89 | 33467.23 | 35039.12 | 35133.74 | 35300.77 | 34852.18 | 34411.81 | 30263.82 | |
| Mean | 30521.53 | 29978.62 | 29986.98 | 29787.02 | 31219.78 | 29757.19 | 30015.95 | 30771.36 | 30536.50 | 29627.45 | |
| Std | 2883.92 | 1738.53 | 364.18 | 1407.49 | 3001.44 | 1627.21 | 2605.28 | 2511.77 | 2041.02 | 344.93 | |
| Environment 3 | Best | 29235.86 | 28839.45 | 29092.15 | 28875.64 | 28845.19 | 28859.34 | 28840.61 | 28813.94 | 28806.88 | 28655.60 |
| Worst | 35241.53 | 34209.93 | 40172.20 | 31693.25 | 34665.93 | 34177.82 | 32800.18 | 31893.60 | 34526.54 | 31591.01 | |
| Mean | 31509.19 | 31131.98 | 31508.20 | 29733.19 | 30574.57 | 30232.44 | 30634.01 | 30103.94 | 31125.37 | 29656.72 | |
| Std | 2558.71 | 2631.29 | 3676.53 | 1366.88 | 2724.41 | 2611.79 | 1724.71 | 1197.91 | 2106.37 | 1153.68 | |
| Environment 4 | Best | 32104.04 | 29687.32 | 29976.24 | 30000.67 | 29744.95 | 29877.29 | 29733.23 | 29959.94 | 29505.62 | 29290.53 |
| Worst | 38424.62 | 35745.37 | 36158.35 | 37890.77 | 36782.14 | 37978.71 | 38111.97 | 37146.94 | 37416.69 | 34313.32 | |
| Mean | 35056.72 | 32253.08 | 31881.71 | 32401.20 | 33685.82 | 32358.58 | 32321.66 | 34237.60 | 33229.82 | 31549.43 | |
| Std | 2364.48 | 2178.09 | 2780.87 | 3644.21 | 2842.43 | 2996.20 | 3200.11 | 2381.97 | 2637.40 | 2525.59 | |
| Environment 5 | Best | 30082.34 | 27732.18 | 27809.34 | 28026.70 | 28238.98 | 27665.37 | 24809.38 | 26264.92 | 25616.97 | 23637.72 |
| Worst | 35473.50 | 30815.47 | 30577.27 | 30203.63 | 33814.24 | 31021.27 | 31224.73 | 32572.90 | 31914.31 | 30146.74 | |
| Mean | 31241.24 | 27911.56 | 28178.77 | 28937.20 | 31909.51 | 28714.51 | 27684.43 | 28937.92 | 29964.84 | 27746.38 | |
| Std | 2335.51 | 2058.33 | 1620.60 | 1506.93 | 3360.33 | 2425.74 | 2491.36 | 2123.46 | 3271.77 | 1451.82 | |
| Environment 6 | Best | 29602.36 | 27573.96 | 29819.96 | 28069.59 | 28173.17 | 27515.35 | 24501.48 | 26667.52 | 28998.63 | 23445.14 |
| Worst | 34345.67 | 32744.86 | 33811.11 | 36694.06 | 32948.58 | 35868.66 | 32601.12 | 35241.69 | 35104.26 | 30529.16 | |
| Mean | 30828.08 | 29352.27 | 30905.74 | 29277.92 | 29135.11 | 30683.45 | 28758.66 | 30077.51 | 31314.01 | 27643.72 | |
| Std | 3336.11 | 1705.75 | 2899.16 | 3713.67 | 2967.11 | 3680.63 | 3215.22 | 3834.74 | 3401.45 | 2376.33 |
| No. | Mean | Best | Worst | Std | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 3 | 2 | 0.2 | 2 | 24501.48 | 32601.12 | 28758.66 | 3215.22 |
| 2 | 4 | 2 | 0.2 | 2 | 23445.14 | 30529.16 | 27643.72 | 2376.33 |
| 3 | 5 | 2 | 0.2 | 2 | 24611.30 | 33012.05 | 28910.54 | 3412.09 |
| 4 | 4 | 1.5 | 0.2 | 2 | 23733.58 | 31115.88 | 28124.88 | 2945.87 |
| 5 | 4 | 2.5 | 0.2 | 2 | 23889.41 | 31901.67 | 28257.42 | 3080.25 |
| 6 | 4 | 2 | 0.1 | 2 | 24123.65 | 31774.33 | 28511.42 | 3001.89 |
| 7 | 4 | 2 | 0.3 | 2 | 24345.56 | 31345.99 | 28402.66 | 2966.72 |
| 8 | 4 | 2 | 0.2 | 1.5 | 24089.22 | 31805.74 | 28683.91 | 3033.15 |
| 9 | 4 | 2 | 0.2 | 2.5 | 23492.36 | 30777.21 | 27665.28 | 2452.68 |
| Environments | EAB-BES VS | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| PSO | DE | TLBO | SMA | SSA | TLSMA | CSSA | BES | mBES | |
| Environment 1 | 4.78 × 10−4 | 8.89 × 10−5 | 7.10 × 10−5 | 1.06 × 10−3 | 4.38 × 10−13 | 3.85 × 10−4 | 1.18 × 10−7 | 1.99 × 10−2 | 8.60 × 10−1 |
| Environment 2 | 3.87 × 10−11 | 2.42 × 10−3 | 5.99 × 10−5 | 1.32 × 10−1 | 3.85 × 10−7 | 2.43 × 10−6 | 1.34 × 10−9 | 8.24 × 10−4 | 6.32 × 10−3 |
| Environment 3 | 1.33 × 10−1 | 1.09 × 10−2 | 2.28 × 10−6 | 4.57 × 10−3 | 1.12 × 10−2 | 3.87 × 10−2 | 1.00 × 10−8 | 1.97 × 10−4 | 2.27 × 10−4 |
| Environment 4 | 2.07 × 10−6 | 1.68 × 10−9 | 6.68 × 10−3 | 3.29 × 10−4 | 3.28 × 10−6 | 7.86 × 10−5 | 4.44 × 10−3 | 4.98 × 10−10 | 1.10 × 10−8 |
| Environment 5 | 1.44 × 10−14 | 4.28 × 10−12 | 2.25 × 10−12 | 9.05 × 10−14 | 1.12 × 10−12 | 8.30 × 10−13 | 3.21 × 10−14 | 1.67 × 10−9 | 3.83 × 10−10 |
| Environment 6 | 2.14 × 10−9 | 6.18 × 10−9 | 1.78 × 10−13 | 3.61 × 10−2 | 4.37 × 10−2 | 2.62 × 10−3 | 4.01 × 10−2 | 4.12 × 10−2 | 2.23 × 10−5 |
| Environments | Indicators | PSO | DE | TLBO | SMA | SSA | TLSMA | CSSA | BES | mBES | EAB-BES |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Environment 1 | Mean score | 4.8 | 4.7 | 8.0 | 5.4 | 5.5 | 5.1 | 5.3 | 6.2 | 5.0 | 3.9 |
| Rank | 3 | 2 | 10 | 7 | 8 | 5 | 6 | 9 | 4 | 1 | |
| Environment 2 | Mean score | 8.0 | 5.7 | 6.1 | 3.7 | 6.8 | 4.0 | 6.7 | 6.8 | 5.5 | 1.7 |
| Rank | 10 | 5 | 6 | 2 | 8 | 3 | 7 | 8 | 4 | 1 | |
| Environment 3 | Mean score | 5.8 | 4.7 | 5.6 | 5.9 | 5.9 | 5.3 | 5.4 | 7.8 | 5.5 | 3.0 |
| Rank | 7 | 2 | 6 | 8 | 8 | 3 | 4 | 10 | 5 | 1 | |
| Environment 4 | Mean score | 7.7 | 5.2 | 4.3 | 5.0 | 6.5 | 5.6 | 5.0 | 5.9 | 6.4 | 3.4 |
| Rank | 10 | 5 | 2 | 3 | 9 | 6 | 3 | 7 | 8 | 1 | |
| Environment 5 | Mean score | 8.1 | 4.2 | 4.8 | 3.9 | 8.1 | 5.2 | 4.0 | 6.8 | 6.1 | 3.8 |
| Rank | 9 | 4 | 5 | 2 | 9 | 6 | 3 | 8 | 7 | 1 | |
| Environment 6 | Mean score | 6.4 | 4.7 | 6.6 | 5.1 | 5.4 | 5.6 | 6.0 | 7.6 | 4.8 | 2.8 |
| Rank | 8 | 2 | 9 | 4 | 5 | 6 | 7 | 10 | 3 | 1 |
| Environments | EAB-BES VS | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| PSO | DE | TLBO | SMA | SSA | TLSMA | CSSA | BES | mBES | |
| Environment 1 | 0.21 | 0.26 | 1.06 | 0.10 | 0.21 | 0.11 | 0.52 | 0.16 | 0.62 |
| Environment 2 | 1.40 | 0.93 | 1.34 | 0.42 | 1.15 | 0.70 | 1.19 | 1.06 | 0.82 |
| Environment 3 | 0.97 | 0.73 | 0.70 | 0.80 | 0.90 | 0.68 | 0.67 | 0.78 | 0.86 |
| Environment 4 | 1.46 | 0.77 | 0.43 | 0.61 | 1.05 | 0.69 | 0.28 | 1.09 | 0.91 |
| Environment 5 | 2.22 | 0.59 | 0.84 | 0.29 | 1.56 | 0.88 | 0.11 | 1.14 | 1.41 |
| Environment 6 | 1.71 | 1.33 | 1.23 | 0.84 | 0.92 | 1.11 | 0.81 | 0.98 | 1.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Xiao, W.; Yin, S. EAB-BES: A Global Optimization Approach for Efficient UAV Path Planning in High-Density Urban Environments. Biomimetics 2025, 10, 499. https://doi.org/10.3390/biomimetics10080499
Zhang Y, Xiao W, Yin S. EAB-BES: A Global Optimization Approach for Efficient UAV Path Planning in High-Density Urban Environments. Biomimetics. 2025; 10(8):499. https://doi.org/10.3390/biomimetics10080499
Chicago/Turabian StyleZhang, Yunhui, Wenhong Xiao, and Shihong Yin. 2025. "EAB-BES: A Global Optimization Approach for Efficient UAV Path Planning in High-Density Urban Environments" Biomimetics 10, no. 8: 499. https://doi.org/10.3390/biomimetics10080499
APA StyleZhang, Y., Xiao, W., & Yin, S. (2025). EAB-BES: A Global Optimization Approach for Efficient UAV Path Planning in High-Density Urban Environments. Biomimetics, 10(8), 499. https://doi.org/10.3390/biomimetics10080499