1. Introduction
Mastication is a complex process in
, where the foods are chewed to smaller and softer boluses that can be swallowed safely [
1]. The food industry has a strong curiosity in this process, since exploring the human-food interaction is beneficial for evaluating food texture properties so as to develop favourable, healthy, and appealing food products. Currently, machines used to assess food textures in vitro only simply compress the test foods in one dimension, which is far away from the real complicated chewing motions of human beings in
. Recruiting healthy volunteers is associated with long-time consumption and high expenditure, and the results are not objective. Thereby, robotic devices that can accurately replicate complete masticatory behaviours in terms of chewing forces and motions in
are greatly needed. With their assistance, newly developed food samples can be chewed in a human-like manner, then food textures can be analysed reliably and efficiently. To this end, it is very natural to design a robotic mechanism by mimicking the muscle-skeleton biostructure of the masticatory system: its end effector is the moving mandible, the base is the fixed maxilla, and six revolute-spherical-spherical (RSS) parallel linkages working synchronously are the major chewing muscles, namely, the temporalis, the masseter, and the pterygoid [
2]. The underlined letter R indicates it is the active joint. Left and right direct constraints from the base (DCFB) to the end effector form two higher kinematic pairs (HKPs), playing the role of the crucial temporomandibular joints (TMJs). As a result, from the viewpoint of mechanism, the designed prototype is a spatial parallel mechanism (PM) receiving DCFB to the end effector. These constraints evidently render this mechanism different from others, since PMs in general do not have this sort of constraints. They increase the topological complexity, bringing two parasitic motions and two redundant actuations simultaneously [
2]. It is fundamental to stress that theoretically, two kinematic chains in the mechanism can be taken out to reduce its topological complexity; then it would have no actuation redundancy. Nonetheless, the biological features of the chewing system in terms of the roles of primary chewing muscles and TMJs cannot be explored adequately via this simpler mechanism, and the potential engineering applications could be limited. Hence, the bio-inspired mechanism under study is designed as faithfully as we can.
Due to the closed-loops, PMs are superior to their serial counterparts in terms of larger load carrying capacity [
3], better motion accuracy [
4,
5], and lower moving inertias [
6,
7], even if their singularity problems are more complex and the workspace is smaller. Thus, they can exert these strengths in the domains where their desirable features are greatly needed [
8,
9], e.g., machine tools [
10,
11,
12,
13,
14], fast pick-and-place manipulators [
15], haptic devices [
16], pointing devices [
17], and physical human-robot interaction [
18,
19].
Before the designed mechanism is employed to evaluate newly developed foods in the food industry, there are two concerns about its practical applications. The first is that, due to the DCFB, parasitic motion variables are strongly coupled by translational and rotational degrees of freedom (DOFs). They have complicated trigonometric functions as in Equation (5) of [
20], where
XYZ Euler angles were used to characterise rotations of the end effector. These complex and lengthy equations considerably increase the computational time in dynamic models, being not in favour of real-time model-based controller design. Thus, more efficient alternatives to Euler angles are sought to reduce the computational cost. In the literature, Euler parameters, i.e., unit quaternions, deeply attract our interest. From the Euler theorem, the orientation of a rigid body can be defined by its rotation around an axis by an angle of rotation
θ at any instant of time [
21]. Thereby, these parameters are stated as
where
u is the unit vector around which the rotation of the body occurs, and its three elements are the projections along the orthogonal axes of the inertia frame. Although four parameters are used to describe rotations in
, indicating they are not completely independent and that one constraint equation is needed; this cumbersome feature is more than compensated for by their desirable merits as:
- 1.
Any orientation of a body in can be defined satisfactorily since there are no inherent singularity problems.
- 2.
Kinematic equations associated with them have purely algebraic operators and are free of trigonometric functions, as with Euler angles, being computationally more efficient. As a result, they are easy to implement in a computer program in simpler and more compact manners.
Regarding these, they are adopted to describe the motions of the end effector of the mechanism under study to enhance the computational efficiency. From the literature, Euler parameters have been widely applied in many arenas due to their advantages. For instance, a general Euler parameter-based dynamic model was built by the Lagrange formulation for mechanical systems [
22]. Many useful and interesting identities between Euler parameters and their derivatives were presented in [
21], based on which the dynamic model can be more compact and efficient [
23]. An attitude regulator for an arbitrary rigid body was designed with these parameters in [
24], leading to a linear feedback law, where neither linearisation nor simplification assumptions such as small angular rates or attitude error angles were made. This presentation avoids nonlinear equations of motion (EOMs) and a nonlinear feedback law associated with Cayley–Rodrigues parameters. Euler parameters were utilised to model the end effector rotation errors in resolved rate and acceleration control of serial manipulators in [
25]. The formulation considerably simplifies the stability analysis of orientation error equations. In [
26], their utilisation in a spherical joint avoided the introduction of three virtual orthogonal revolute joints with zero length of intermediate links in the general manner, which raised the sizes of associated matrices in the EOMs and finally the computational burden. The dynamic modelling of a spatial RSSR serial mechanism showed that the CPU time has a 10% improvement over the virtual revolute joints method, and less computer memory is required. To address the photogrammetric problem, a closed-form solution was provided in [
27], where unit quaternions were used to simplify the derivation of the solution.
As far as their applications in PMs are concerned, in [
28], based on the number of constant zero components of Euler parameters, they were classified into 15 cases, and their kinematic interpretation was presented. Then, the orientation of the end effector of a 3-DOF 3-RER PM with orthogonal platforms was represented using Euler parameters effectively. Letters R and E denote revolute joint and planar joint, respectively. In [
29], the above-mentioned 15 cases of classification were used again, then Euler parameters were employed together with Euler angles, algebraic geometry, and axodes to effectively identify and compare distinct continuous motion characteristics of three 2-DOF pointing mechanisms, i.e., a gimbal structure, a 1-RR&2-RRR spherical PM, and an Omni-Wrist III. A systematic classification of a 3-RER PM based on the type/number of operation modes varying with link parameters was presented in [
30]. Euler parameters are found to be very useful for identifying the motion characteristics of the end effector.
Apart from the computational cost, the second concern in the designed mechanism is that, in practical experiments of its prototype, at the direct constraints from the base to the end effector, wear appears due to friction effects, further introducing clearances and reducing motion accuracy. Additionally, friction exists in the brushes, rotors, and bearings inside the actuators, but it is not desirable to disassemble them frequently to lubricate those parts. In this regard, for the sake of reliable and accurate manipulations of the robotic device in practice, the friction is worth being considered in the inverse dynamic model to analyse its effects.
In terms of friction effects in PMs, from the literature, a Lagrange-based approach was proposed to analyse the forward dynamics of a 3-PRS PM in [
24], where the LuGre friction effects are modelled at active prismatic joints. Letters P and S denote a prismatic joint and a spherical joint, respectively. On this basis, the influence on the motion accuracy was analysed. EOMs of forward dynamics with a closed form were formatted by the Udwadia–Kalaba approach for a planar 2RRR/RR PM with actuation redundancy in [
31]. In [
32], the friction effects were expressed by the Stribeck model in the artificial hip joint, thrust ball bearing, and linear module of 2(3PUS+S) PM. The letter U denotes a universal joint. Their parameters were identified by a least-squares method, and their negative effects were compensated for through a feedforward compensation method. An explicit dynamic model with joint friction was established for a 4-UPS PM, which was incorporated into a 5-DOF hybrid polishing robot [
14]. The Newton–Euler method was utilised to build the model, and friction effects were modelled by the Coulomb-viscous friction model. To build an accurate dynamic model of a hybrid spray-painting robot in [
33], the Stribeck friction model was used to express friction effects in all active joints. The coefficients were identified, and these effects were compensated for in the inverse dynamic model. A nonlinear friction model, which can capture viscous, Coulomb, and Stribeck effects, was developed for the 2RRR/RR PM in [
34]. The comparison of the control performance between this model and the Coulomb-viscous friction model showed that the trajectory tracking accuracy was improved significantly in the former.
From the literature review, the practical applications of Euler parameters can be found extensively, and their theoretical study has reached an in-depth level. However, their application in PMs, especially those with various constraints from lower kinematic pairs and HKPs like the one under study, has not been reported yet. In terms of friction effects, they are considered only in a few publications about the dynamics of PMs. In the target PM, to reduce the computational demands of inverse dynamics and the negative effects from friction, an Euler parameter-based inverse dynamic model with friction effects at HKPs and actuators is built in this paper. The two novelties are summarised as:
- 1.
Euler parameters are employed to describe the motions of the constrained end effector in the target PM, sharply reducing the computational expenditure of the model.
- 2.
Friction effects are accounted for at HKPs and active revolute joints, arriving at a nonlinear but more accurate inverse dynamic model.
The paper is organised as follows: in
Section 2, the mechanism under study is described in detail. The motions of the end effector are studied using Euler parameters in
Section 3. In
Section 4, the inverse dynamic model with friction effects is built by Newton–Euler’s law. Numerical computations are presented in
Section 5 to find the transformation between Euler parameters and Euler angles, the dynamic performances of the mechanism under study, and the influence of constraints at HKPs on kinematics and dynamics. Finally, some conclusions are given in
Section 6.
2. The Robotic Mechanism
The scheme of the target PM constrained at two HKPs is illustrated in
Figure 1. The fixed maxilla to which the inertia frame {
S} is assigned is not shown in the figure for a clear exhibition of moving bodies. The movable lower jaw, namely, the end effector, is connected to the base by six independent kinematic linkages. Frame {
S} owns a horizontal
XS-
YS plane perpendicular to the vertical
ZS axis. At the mass centre
OM of the end effector, a body-fixed frame {
M} is set. Frames {
S} and {
M} are completely coincident when the mechanism is at the home position, i.e., the upper and lower jaws are occlusal. The position coordinates of
OM in {
S} denote the translations of the end effector, and its orientations with respect to the inertia frame are computed by Euler parameters. In the chains, the crank
GiSi (
i = 1,…,6) is actuated by a revolute joint centred at
Gi, and the coupler
SiMi connects the crank and the end effector at its two ends
Si and
Mi, respectively, using spherical joints. A frame {
Ci} is attached to
Gi to express the rotation of the
ith actuator. In it, the
axis is from
Gi to
Si, the
axis runs through the rotational axis of the actuator, and the
axis completes the frame, obeying the right-hand rule. A frame {
Ni} is attached to the mass centre
Ei of the coupler to describe its motions in {
S}. The
axis points from
Si to
Mi, the
axis is parallel to the cross product of two unit vectors defined along the
and
XS axes, and the
axis is defined by the right-hand rule. Note that only one actuator frame {
C5} and one coupler frame {
N5} are drawn as illustrative examples in the diagram for the sake of clarity.
From a close observation of
Figure 1, one can see that the point-contact HKPs mimicking TMJs between left and right condylar balls and condylar surfaces are only schematic, since the former can only receive unilateral constraints from the latter. Hence, in the prototype, due to motion errors in engineering practice, condylar balls are separated from articular surfaces easily. Thus, the nature of the mechanism is changed. In these regards, the HKP-related mechanical parts in engineering practice are shown in
Figure 2 with the computer-aided design (CAD) model of the prototype. The condylar ball slips along a condylar socket that has a width equal to its diameter. Thereby, the point-contact HKPs during the arbitrary motions of the end effector can always exist. By this design, the motion of the condyle ball centre
Ti (
i =
L,
R) is always constrained onto a surface, which is offset from the upper and lower surfaces of the socket by the ball radius. Thereupon, it is clear that the end effector is actuated by six chains and constrained by the base at two HKPs simultaneously.
4. Dynamic Model
Before the dynamic model is established, two reasonable assumptions about friction effects are made: 1. The two HKPs are easily subject to wear and tear due to friction forces. Thereby, from the viewpoint of practical applications, these forces are incorporated into the dynamic model to make it more accurate. Meanwhile, in the prototype, revolute joints are actuated by DC servo motors, and it is hard to lubricate the inner bodies, such as brushes, rotors, or bearings. Henceforth, friction torques in these joints are also modelled. 2. Frictional moments exist in twelve passive spherical joints; however, the size of the ball in the socket is very small, so these moments are not large. Additionally, friction effects in passive spherical joints of PMs have been studied in [
14] already. To avoid a tedious deviation in the dynamic model and highlight the unique HKPs, all spherical joints are assumed friction-free.
Friction effects are tightly related to constraint forces at joints, which are difficult to find using energy-based dynamic methods, such as the Lagrangian formulation or Hamilton’s equations. Additionally, in view of the intrinsic dependence of Euler parameters, Lagrange multipliers are needed if Lagrange equations are used to build the model. They would greatly increase the number of coordinates in the model. Consequently, the methods in [
21,
38] are not adopted, and the dynamic model of the entire mechanism is built using the classical Newton–Euler’s law. A great deal of friction models have been reviewed in [
39], which are classified into static and dynamic types. In view of the complex topology of the target mechanism, the classical Coulomb and viscous friction model, which belongs to the static type, is applied.
4.1. End Effector
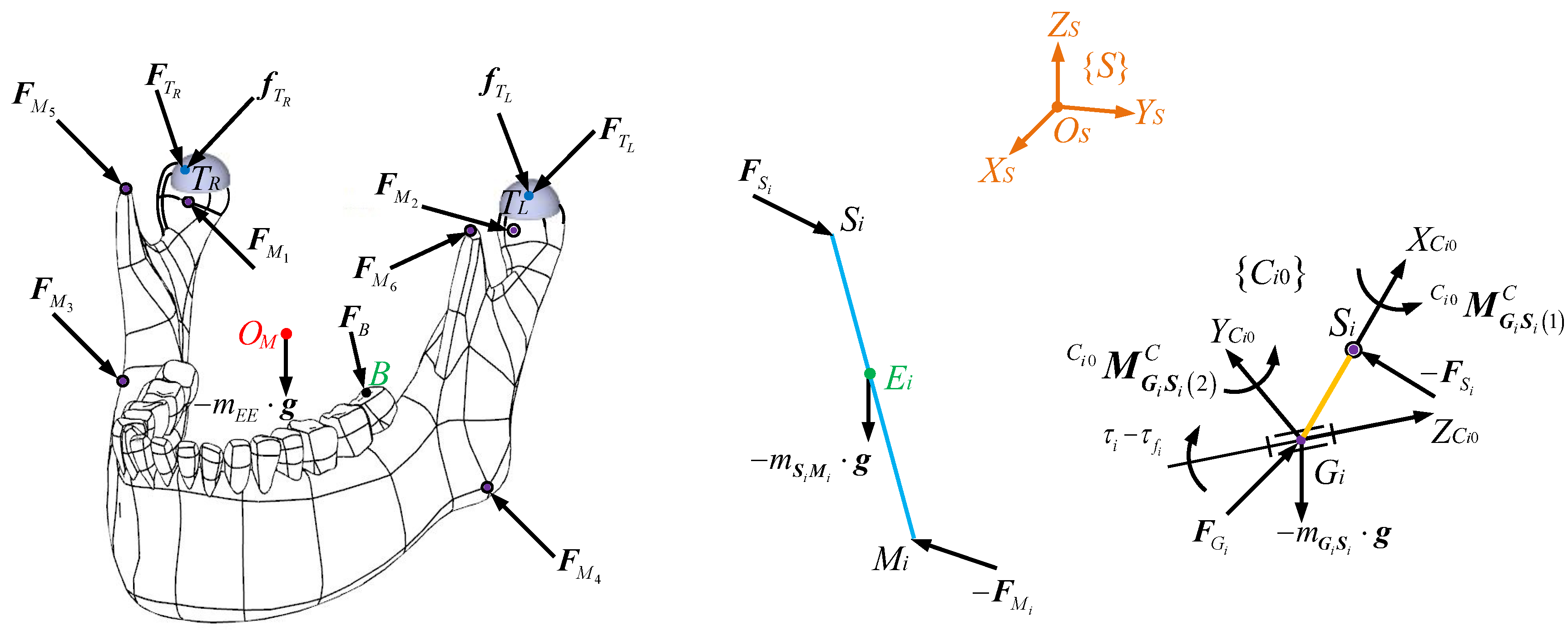
The free-body diagram of the end effector is shown in
Figure 3. The forces acting on the end effector include constraint forces
at spherical joints
Mi, its gravity
at
OM in which
mEE is the mass and
is the gravitational acceleration vector, the reacted chewing force
FB at point
B of a left lower molar, and constraint forces
and friction forces
acting at
Ti from the surfaces of condylar sockets.
can be computed as
where
is along the orthogonal direction of the planar surface specified in Equation (2), and
is the component of
along the
ZS axis. The friction force at HKPs under the Coulomb and viscous friction model is
where
and
are Coulomb and viscous coefficients, respectively,
is the absolute value of
, and
is the two-norm sum of the linear velocity
at
Ti. As a result, friction forces at HKPs are not only a function of
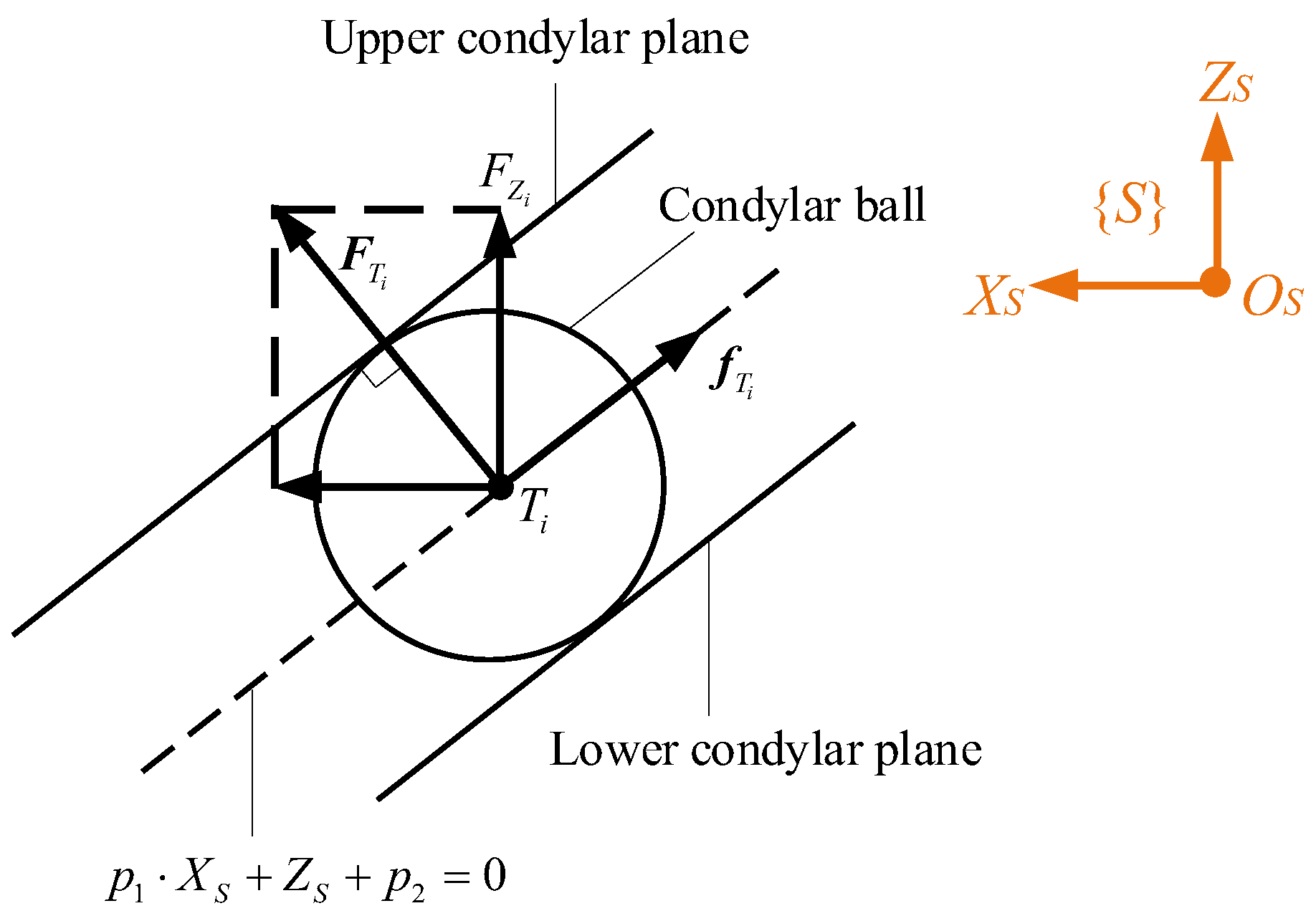
but also the dynamics of the entire mechanism. The schematic diagram of the constraint forces
from condylar sockets and the friction forces
at the condylar ball from the sagittal view is displayed in
Figure 4. One can see that
is perpendicular to the surface on which
Ti is constrained, and
is on this planar surface.
can be decomposed into two components, which are along the
ZS and
XS axes, respectively.
Note that since at all time instants of the tracked trajectory in
Section 5,
is nonzero, then the case
is not considered in the following. By the Newton–Euler formulation, the EOMs of the lower jaw are
where
In Equation (31), and are cross-product matrices spanned by and , respectively, is the reacted wrench on the end effector by FB. mEE is the mass of the end effector, is the inertia matrix of the end effector updated as a function of its orientations in {S}, and is the inertia tensor of the end effector with respect to {M}.
Putting Equations (28) and (29) into Equation (30) gives rise to a compact form as
where
and
is the Kronecker product.
4.2. Coupler SiMi
The free-body diagram of the
ith
coupler is given in
Figure 3. Via the Newton–Euler’s law, for the
ith coupler, one can format
where
is the constraint forces at
Si acting at
SiMi,
is the mass, and
is the linear acceleration of
Ei,
and
are the angular velocity and acceleration, respectively,
is the inertia tensor with respect to
Ei and built in {
S}, and
is the inertia tensor with respect to
Ei and built in {
Ni}. Combining the two equations in Equation (33) yields
where
.
Among the three scalar equations in Equation (34), arbitrarily only two are independent; the last two are chosen for the following computation. Thus, for the six couplers, one can write
where
, and the subscripts (2:3,:) and (2:3) denote the last two rows of
and the last two entries of
, respectively. Meanwhile, repeating the first equation in Equation (33) six times for the six couplers produces
where
These equations will be incorporated into those for the end effector and crank to build the dynamic model of the entire mechanism.
4.3. Crank GiSi
To find frictional torques at active revolute joints at
Gi, the constraint force
is to be derived. The free-body diagram of the
ith
crank is shown in
Figure 3. Firstly, because the crank owns a cylinder shape, and it only rotates around the central line, which is along the
axis of frame {
Ci}, its force equilibrium in {
S} produces
where
is the mass and its mass centre locates at the
axis.
can be expressed in frame {
Ci0} as
to minimise computational overhead, where frame {
Ci0} denotes frame {
Ci} when the angular displacement
of the
ith crank is zero. As such, for the six revolute joints, a compact form of all constraint forces at
Gi can be written as
The Euler’s law is used to write the rotational EOM of the
ith crank in {
Ci0} as
where
is the 2 × 1 vector containing two constraint moments around the
and
axes of {
Ci0},
and
are the actuating torque and the frictional torque in the
ith actuator, respectively,
is the angular acceleration, and
is the rotational inertia of the
ith crank. Thereby, around the direction of actuations, i.e., from the third line of Equation (40), one can list
where
is the cross-product matrix of
and
means the third line. By the Coulomb and viscous friction model,
is computed as
where
Ri is the friction arm of the
ith actuator,
and
are the Coulomb and viscous coefficients, respectively, and sgn(·) is the sign function. Additionally,
can be written as
Putting it into Equation (40) produces
where
. As a result, for the six cranks, one can derive
where
In addition, from the first two lines of Equation (40), one can write
where
is the first two lines of
.
4.4. Entire Mechanism
Combining the EOMs of the end effector in Equation (32) and the six couplers in Equation (35) generates
Then,
can be computed as
where
Thus, with Equation (36), all constraint forces at
S1~
S6 can be computed as
where
. Finally, putting Equation (49) into Equation (45) produces the explicit dynamic model of the entire mechanism with friction effects at HKPs and revolute joints as
where
are known matrices if the motions of the mechanism are given. There are six equations and eight unknowns in
and
in this model, indicating that actuating torques and friction effects should be optimally computed. Furthermore, a closer observation of Equation (50) can lead to the following remarks:
- 1.
Even if a simple Coulomb and viscous friction model, which is classified as a static one in [
39] is employed, friction effects at HKPs significantly enhance the nonlinearity of the dynamic model in terms of
explicitly, and they implicitly influence frictional torques
, since
is the function of
as shown in Equations (39), (42), and (49). Regarding these, friction effects at HKPs and revolute joints are strongly coupled, and actuating torques are influenced by them.
- 2.
If all friction effects are neglected, Equation (50) degrades to the form of
where
M1 and
M2 are matrices that are the functions of kinematic and dynamic parameters of the target PM. Equation (51) is actually the simpler linear inverse dynamic model of the target mechanism free of friction with six equations and eight unknowns, including actuations and constraint forces
FZ. The form of Equation (51) is very different from that of the final EOMs of PMs in [
31,
32,
33], since their unknowns are only actuations.
4.5. Optimal Goals to Distribute Actuating Torques
Because the inverse dynamic model of the mechanism under study is underdetermined with six nonlinear equations and eight unknowns, actuating torques can be optimally distributed to meet different dynamic performances. In this optimisation problem, the eight unknowns are the optimal variables, and physical constraints include:
Constraint forces cannot exceed the axial and radial loading capacities of the chosen actuator in the prototype;
The output power of the actuator is below its maximum power capacity;
The inverse dynamic model, Equation (50), is the nonlinear equality constraint.
Based on the physical application of the mechanism, three optimal goals are individually set to produce different performances.
As far as the initial guess under the three optimal goals is concerned, at t = 0, and are used as the initial guess, and the obtained values of and FZ are used as the initial guess of the optimisation scheme at the next time instant. This loop is repeated for each time interval until the end of the timeline.
4.5.1. Minimal Actuating Torques
This goal can be mathematically defined as
where
is the two-norm sum of
. The physical meaning of this goal is to minimize the output torque from the actuator, in favour of motor sizing in the design stage of the mechatronics system. In fact, this goal is often achieved in PMs with redundant actuations by virtue of the Moore–Penrose pseudo-inverse matrix to directly compute
, as in [
40,
41,
42,
43]. However, in Equation (50),
and
have different units, and the nonlinear term
exists. Henceforth, a more complex optimisation algorithm is needed to numerically compute
and
simultaneously.
4.5.2. Minimal Constraint Forces at S1~S6
As shown from Equations (38) and (46),
directly influences constraint wrenches at
Gi. Because the chewing behaviours of human beings to be mimicked by the designed mechanism are approximately periodic, large constraint wrenches at
Gi bring large vibrations and impulses to the base and neighbouring devices. As such, a second goal is set as
which can minimize the constraint forces at
Si and then reduce these abovementioned negative effects.
4.5.3. Minimal Constraint Forces at HKPs
A large constraint force at a HKP tends to cause large friction and then wear and tear easily occurs in the condylar ball and the condylar socket. Regarding this, a third goal is defined as
which can minimise the constraint forces at HKPs; thus, wear and clearance caused by friction effects can be minimised.
Finally, the sequential quadratic programming (SQP) method is characterised by fast convergence, and nonlinear constraints, as mentioned above, can be easily incorporated. Thus, this method is to be employed to optimally compute the dynamic model.
It is noted that what we are concerned about is whether the designed mechanism can vividly reproduce the chewing behaviours of human subjects; thus, this robotic device can be applied in the food industry to evaluate the newly developed food properties as mentioned in
Section 1. Secondly, the mechanism is actually a simplified model of the human chewing system, which has more muscles than those in the designed mechanism. In these regards, how the muscles in the human masticatory system work synchronously under the control of the central neural system is left to the oral biologists to discover.
5. Numerical Computations and Discussions
The coordinates of
Gi and
Si (
i = 1,…,6) in frame {
S}, and
Mi in frame {
M} are summarised in
Table 1, and the geometrical and inertia parameters of the mechanism are summarised in
Table 2.
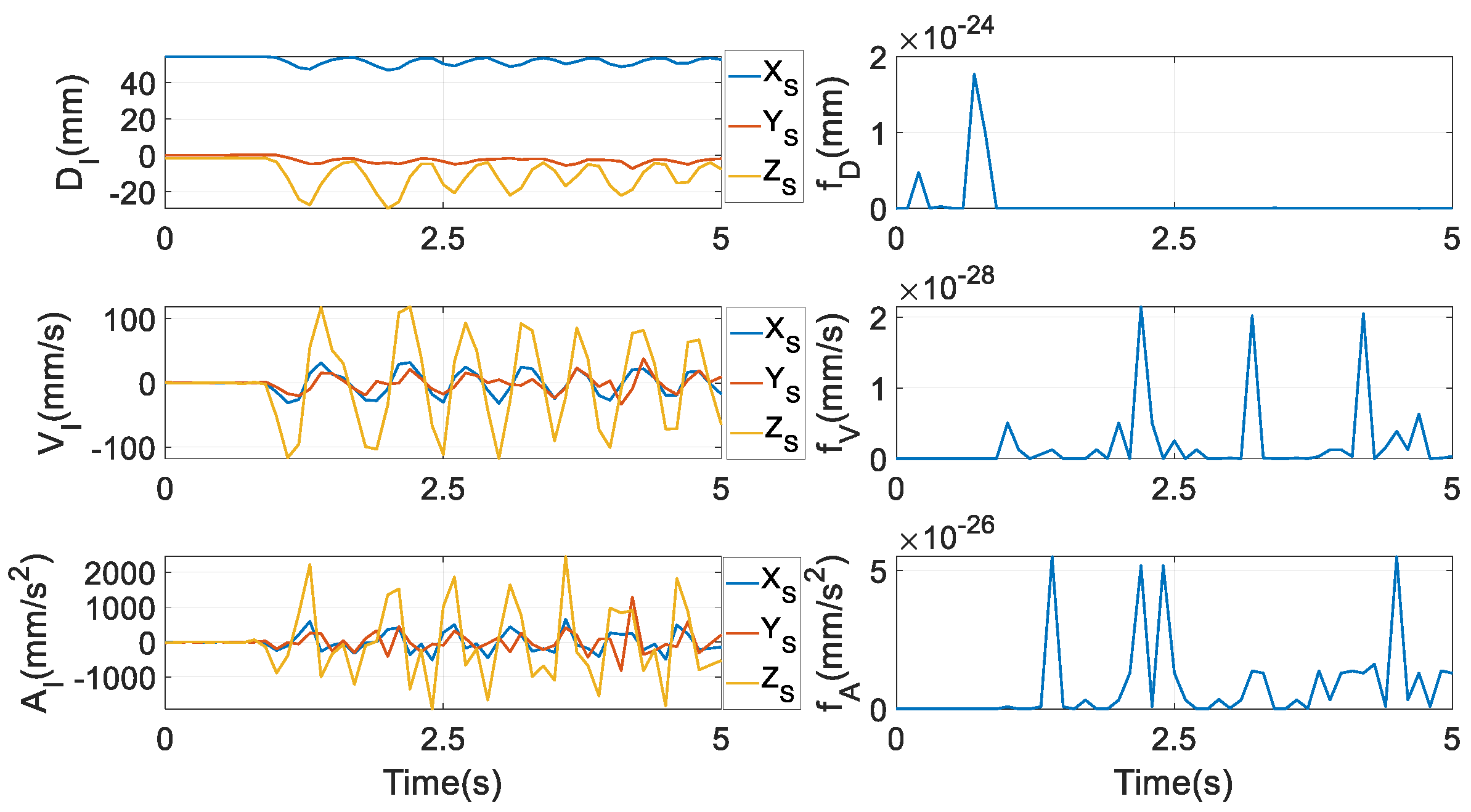
5.1. Computation of and
To study the dynamic model numerically, the mechanism is commanded to follow a lower incisor path of a healthy volunteer in
. To track the trajectory with respect to displacement, only three scalar equations can be formatted as
where
contains three position coordinates of the incisor point
I in frame {
M}, and
is the position vector of this point in {
S}, whose numerical values are exhibited in the first subplot of
Figure 5. The letters D, V, and A in labels of the three subplots in the first column denote displacement, velocity, and acceleration, respectively. In Equation (55), there are only three equations but five unknowns in
, i.e., theoretically, there are infinite solutions. Nonetheless, it is not easy to numerically resolve this set of nonlinear equations. From the literature, the algorithm in [
44] enlightened us: to identify the solution to a transcendental equation in that paper, the equation is not computed numerically. The researchers’ logic is that the values of the unknown variables that can make the absolute value of the transcendental equation as small as possible are the solutions. By virtue of this idea, to find one feasible solution of
, a single-aim optimisation problem is constructed as
Constraints: Equations (5) and (7)
Method: SQP
The physical meaning of the aim is to track the predefined incisor trajectory with the smallest tracking error in terms of displacement. The ranges of X and Y are determined by the length and width of the socket that holds the condylar ball in the prototype, respectively.
After is obtained, can be computed by Equation (7). At t = 0, is used as initial guess, and the obtained values of are used as the initial guess of the optimisation scheme at the next time instant. The loop is repeated for each time interval until the end of the timeline.
Correspondingly, in tracking the velocity of this trajectory,
cannot be uniquely determined, since, likewise, there are five unknowns in
but only three equations, as
where
MI is the 3 × 5 Jacobian matrix between the coordinates of the incisor point
I and
, and
is the 3 × 1 velocity vector of the incisor trajectory, whose numerical values are given in the second subplot of the first column of
Figure 5. From Equation (5), constraint equations from the velocity and the acceleration levels can be attained by differentiating it with respect to time once and twice, respectively
Thus, to reach one feasible solution of
, a second optimisation problem is set as
Constraints: Equations (10) and (58)
Method: SQP
where numerical values of in MI are fed from those computed by Equation (56). The physical meaning of this aim is to track the predefined incisor trajectory with the smallest tracking error in terms of velocity. At t = 0, is used asan initial guess, and the obtained values of are used as the initial guesses of the optimisation scheme at the next time instant. The loop is repeated for each time interval until the end of the timeline.
Finally, to compute
, only three scalar equations can be written as
where
is the predefined 3 × 1 acceleration vector of the incisor point
I, whose numerical values are shown in the third subplot of the first column of
Figure 5, and
is the first time-rate of
. Identically, to reach a feasible solution of
, a third optimisation problem is set as
Constraints: Equations (11) and (59)
Method: SQP
where numerical values of in MI and are fed from those computed in Equations (56) and (60). The physical meaning of this aim is to track the predefined incisor trajectory with the smallest tracking error in terms of acceleration. After this, and can be computed from Equation (10) and Equation (11), respectively. At t = 0, is used as initial guess, and the obtained values of are used as the initial guess of the optimisation scheme at the next time instant. The loop is repeated for each time interval until the end of the timeline.
By these three optimisation procedures, the numerical values of
fD,
fV, and
fA are obtained as in the second column of
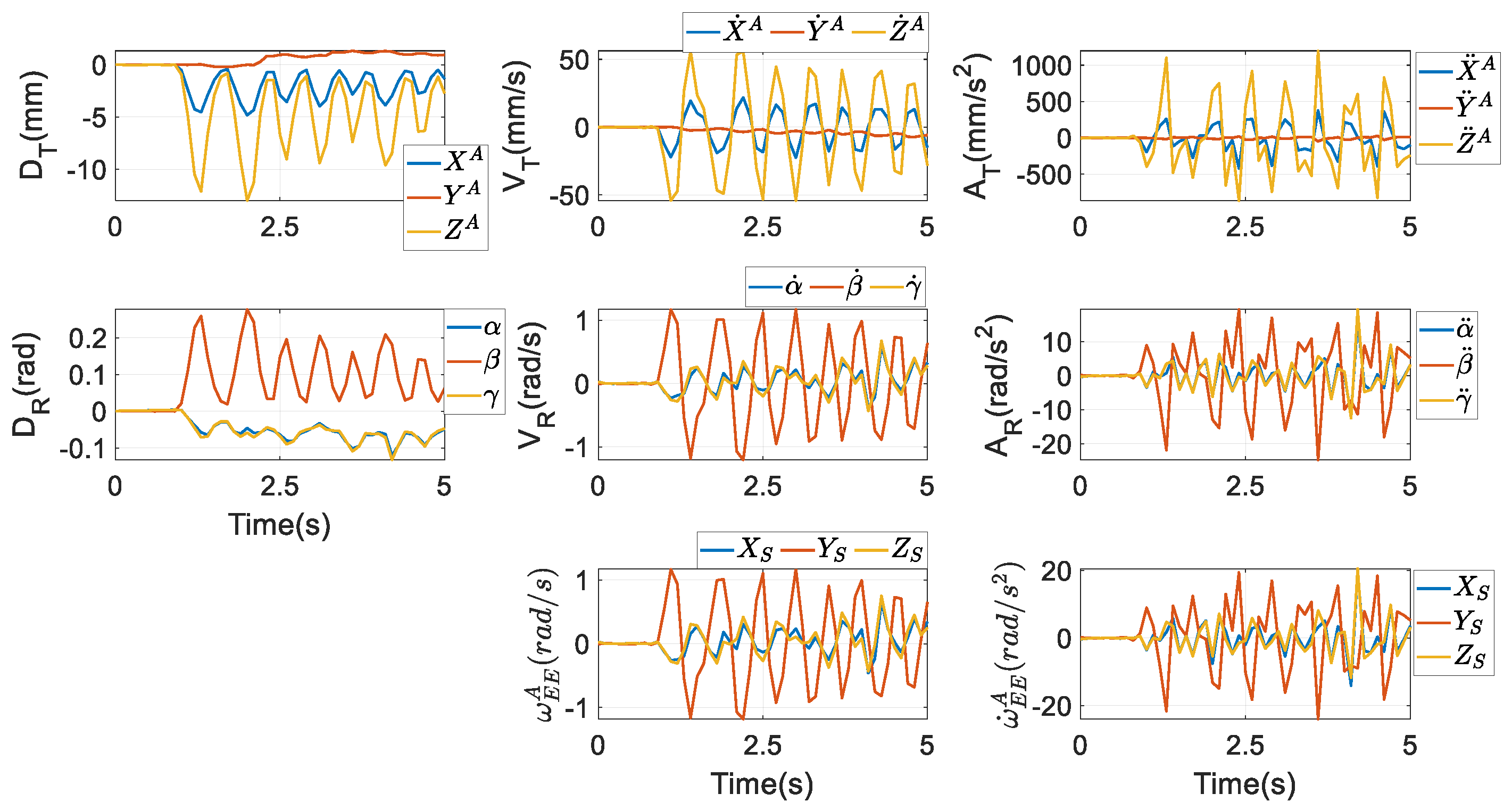
Figure 5, being very tiny. Thus, the predefined incisor trajectory is reckoned to be tightly followed in terms of displacement, velocity, and acceleration. Correspondingly, all
are shown in the first seven subfigures of
Figure 6, where D, V, and A mean displacement, velocity, and acceleration, respectively, and the subscripts T and R indicate translation and rotation, respectively. Unambiguously, the motion range of the parasitic motion variable
Z is far larger than that of
X and
Y, and the magnitudes of
and
are also far larger than their counterparts. This discovery is very different from [
45], where parasitic motions are required to be as small as possible. Additionally, the magnitudes of
θ1 and
θ3 are nearly equivalent, due to the coefficient in front of
θ1 in the formula of
θ3 from Equation (7) being almost equal 1.
and
are computed by Equations (12) and (14), and they are given in the last two subfigures.
.
Note that by following the predefined incisor trajectory, the denominator of θ3 as in Equation (7), is nonzero. Perhaps in the entire workspace of the mechanism, there are some configurations where the denominator of θ3 is zero; then θ3 cannot be computed from Equation (7), and probably some other coordinates in the four Euler parameters would be switched as parasitic motion variables. It is worth a deeper investigation in the future work.
5.2. Transformation Between Euler Parameters and Euler Angles
A critical reason to employ Euler parameters to describe the constrained motions of the end effector is to reduce the computational cost, as stated in
Section 1. To this end, for a fair comparison, the end effector must undergo identical motions as expressed by Euler parameters if some other sets of parameters are employed, such as Euler angles. However, this cannot be realised in the target PM due to DCFB. The reason is as follows.
Firstly, when Euler angles are used to describe the rotation of the end effector, the parameters describing its configuration are grouped in a 6 × 1 vector as in Equation (3) of [
20]
where
XA,
YA, and
ZA are the coordinates of
OM in the inertia frame {
S}, and
α,
β, and
γ are the
XYZ Euler angles. A superscript
A is added to indicate parameters expressing translations are used together with Euler angles. Then, the four DOFs are grouped in a 4 × 1 vector as
For the parasitic motions,
ZA owns a completely identical expression as
Z in Equation (7); however, the rotation matrix
in it is expressed by Euler angles. The parasitic Euler angle
in Equation (5) of [
20] is repeated here as
where
s(·) and
c(·) indicate
sin(·) and
cos(·), respectively.
Thereby, by virtue of Euler angles, these parasitic motions are full of trigonometric functions. Note that two translational DOFs along the
Xs and
Ys axes of {
S} exist in both
and
. As such, to derive the passage from Euler parameters to Euler angles, one can easily define
where
is the rotation matrix calculated by
α,
β, and
γ. Then, an identical posture of the end effector in terms of both the translation of
OM and the orientation of the end effector can be achieved by Euler parameters and Euler angles. The three Euler angles can be computed by
where
rij (
i,
j = 1,…,3) means the element at the
ith row and
jth column of the rotation matrix
in Equation (4).
However, one identical twist of the end effector is not easy to be reached by these two sets of parameters. Apart from Equation (12), the twist using
can also be written in the form of
where
is the 6 × 4 twist-shaping matrix and
is the first time-rate of
.
If
tEE from Equations (12) and (68) is equivalent, we can find
where
I2 is the 2 × 2 identity matrix,
and
O2 are the 2 × 3 and 2 × 2 zero matrix, respectively,
M1b2 is the 4 × 5 submatrix of
M1b containing its third to the sixth rows, and
MA2 is the 4 × 4 submatrix of
MA containing its third to the sixth rows. Thus, from the first two rows of Equation (69), we can find
In fact, this can also be attained from the first two equations of Equation (66). Afterwards, from the last four rows, we can obtain
where
and
. It derives that
If the twist of the end effector tEE is predefined from , i.e., Equation (12), then we need to compute and from Equation (72); however, the four rows of are generally independent. Thus, it is an overdetermined set of linear equations. It is not easy to find the solutions to and . Likewise, if tEE is predefined from , i.e., Equation (68), then we need to compute ~ from Equation (72), and generally the four rows of M1b22 are independent. Thus, it is not easy to find the solutions to ~ neither.
Following the same logic, a first time-rate of the twist using Euler parameters cannot be equivalently expressed by Euler angles, and vice versa. This phenomenon is clearly caused by DCFB which produce parasitic motions and then reduce the number of DOFs. In summary, an identical configuration can be reached by Euler parameters and Euler angles, whilst these two sets of parameters can reach neither an identical twist nor its first time-rate.
In this regard, the optimisation procedure in
Section 5.1 is implemented again to obtain
, which are independent of the procedures to compute
. Then, from
Section 3 of [
20],
and
can be computed as given in
Figure 7, and
can be further attained by differentiating
. These values are used in the dynamic model to make a relatively fair comparison, to find which set of parameters is more computationally efficient.
From
Figure 6 and
Figure 7, their first subplots are equivalent, as stated after Equation (66). However, as far as the first time-rate of the coordinates of the mass centre
OM is concerned, from the second subplot, differences between
and
, and those between
and
are much more apparent. The same conclusions can also be made in terms of the second time-rate of the coordinates of
OM, as shown in the third subplot. From the subplots about rotations, though the profiles of
θ1~
θ3 are very close to those of
α,
β, and
γ, their amplitudes are clearly not equivalent. Through the optimisation scheme in Equation (56), the coefficient in front of
θ1 in the formula of
θ3 from Equation (7) almost equals 1. Besides, the analogous optimisation scheme also renders the value of
γ almost equivalent to that of
α through Equation (64).
The profiles of the rotational velocity
computed via Euler parameters at the bottom row of
Figure 6 are similar to those of the rotational velocity
computed via Euler angles at the bottom row of
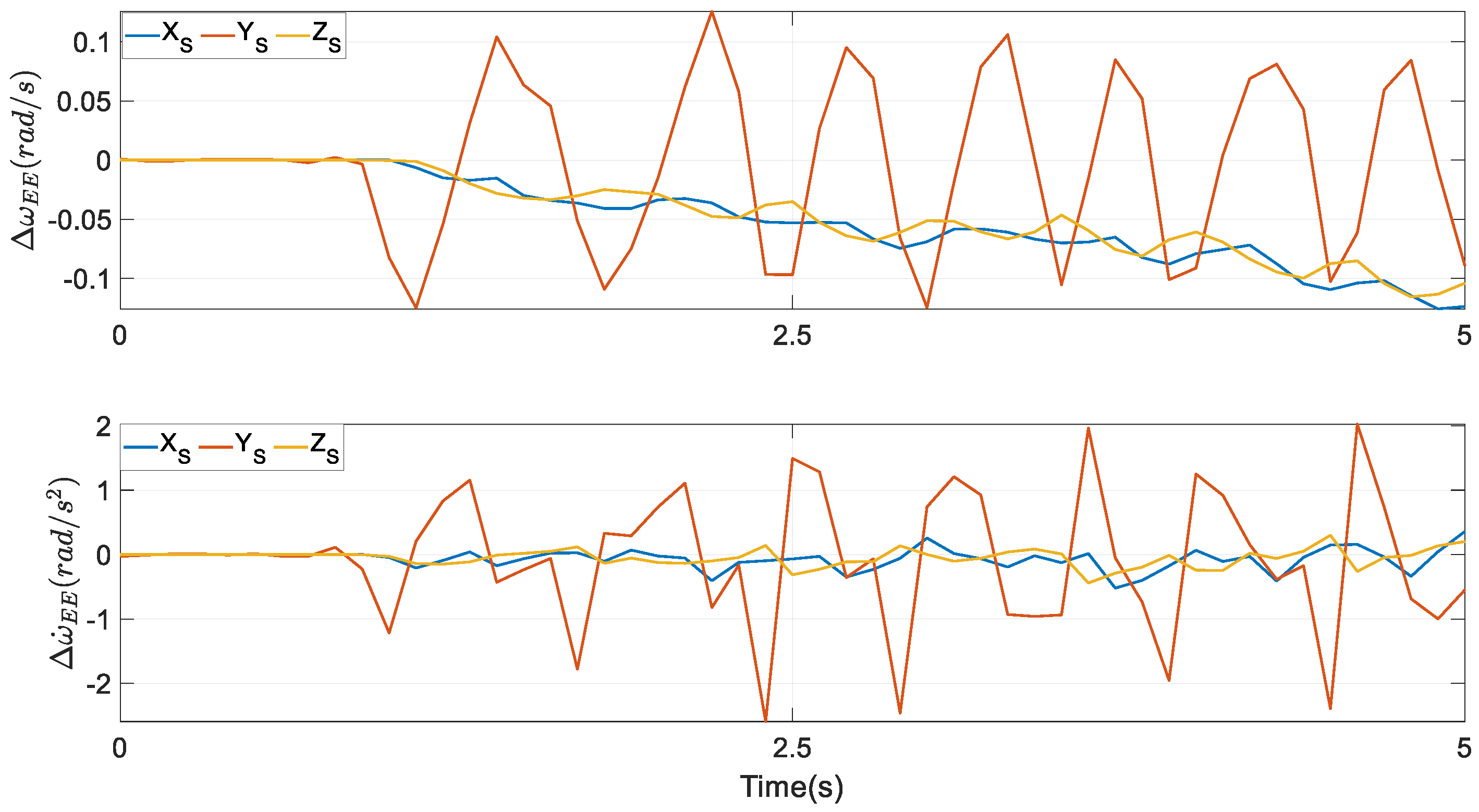
Figure 7. Actually, their numerical values are different at every time instant, however. The same conclusion can be reached by the rotational acceleration. The differences between
and
are displayed in the first subplot of
Figure 8, while in the second one, the differences between
and
are presented.
5.3. Dynamic Performances
Corresponding to the three optimal goals in
Section 4.5, the following performance indices are set to justify the optimisation problem:
where
N is the number of sampling instants along the timeline,
is the two-norm sum of the specific vector at the
ith instant. The physical meanings of
F1~
F3 are to compute the mean values of the two-norm sum of the actuating torques, the constraint forces at HKPs along the
ZS axis, and the constraint forces at
Si (
i = 1,…,6), respectively, along the timeline. They correspond to the three optimal goals in
Section 4.5 sequentially.
Additionally, some other indices are set to see their strong correlations with
F2 and
F3
where
. The physical meanings of
F4~
F7 are to compute the mean values of the two-norm sum of the friction torques at active revolute joints, the constraint moments at
Gi (
i = 1,…,6), the sum of the friction forces at two HKPs, and the constraint forces at
Gi (
i = 1,…,6), respectively, along the timeline. Evidently, from the derivation of the dynamic model in
Section 4.1,
Section 4.2,
Section 4.3 and
Section 4.4,
F4~
F6 and
F7 are tightly related to
F2 and
F3, respectively. By setting these performance indices, the correctness of the computations can be verified.
In general, true friction coefficients in the friction model are identified in practice to compensate for their effects; in this paper, their values are assumed to show the friction effects, however. Their practical identification will be performed in the future. For the Coulomb and viscous friction model, all the coefficients are set as
An experimentally measured reacted chewing force in {
S} on peanuts by an orally healthy male volunteer on his molars, as in
Figure 9, acts on the lower left molar at point
B. The magnitude in the vertical direction in the inertia frame is far larger than its components along the
XS and
YS axes in every stroke, indicating that larger bite forces in this direction are needed to chew the peanuts.
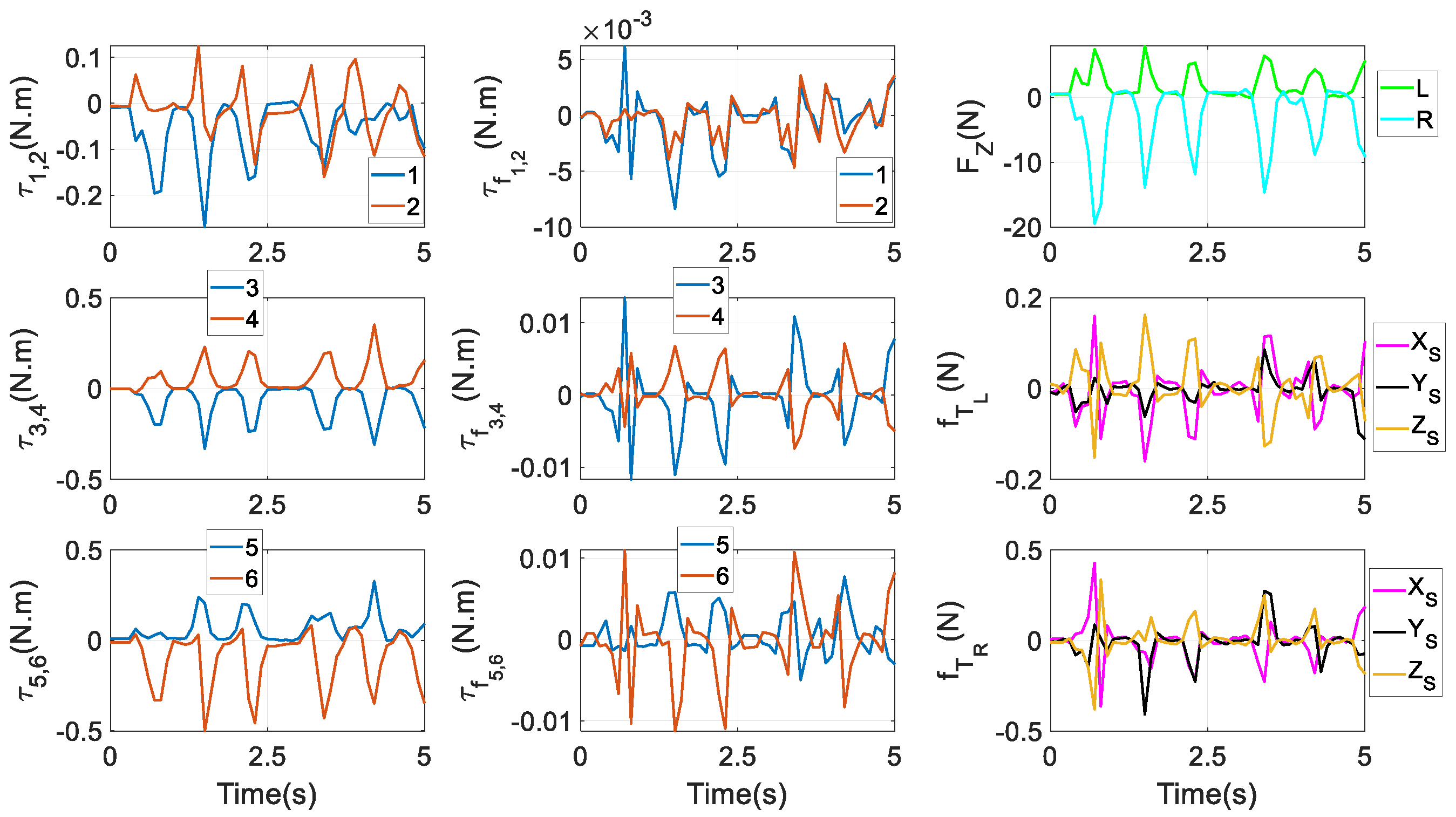
Under the first aim in Equation (52), actuating torques
, friction torques
, constraint forces
FZ, and friction forces
at
Ti are given in
Figure 10. All these variables are following an identical rhythm. Evidently, there is a certain degree of symmetry between
and
,
and
(
i = 1,3,5), respectively. At most of the time instants,
and
are negative and positive, respectively, indicating that the right and left condylar balls are receiving constraint forces from the upper and lower surfaces of the two condylar sockets, respectively. That is because a reacted bite force
FB is acting at a left molar, tending to rotate the end effector around the positive direction of the
XS axis. Additionally,
has larger peaks than
, then friction peaks at
TR are accordingly larger than those at
TL.
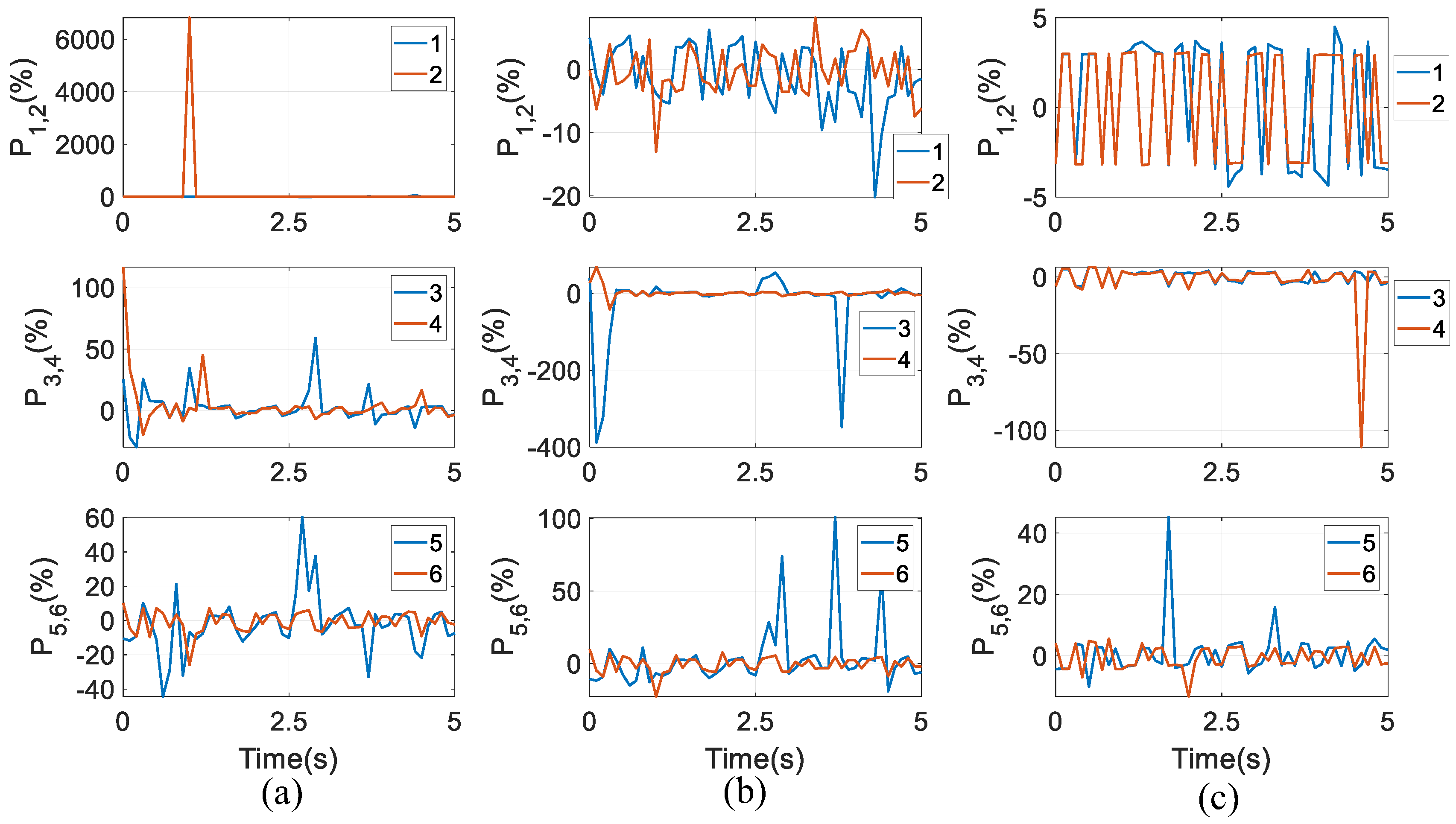
The proportions between friction effects and actuating torques in each actuator are computed as
where
is the
ith entry of
, and
is the 6 × 1 friction torque vector accounting for friction effects at both HKPs and actuators with respect to the output shafts of actuators.
Numerical results under the three optimal goals are displayed in the three columns of
Figure 11, respectively. Under the first aim, the proportion in the second actuator can even reach up to over 6000% at
t = 1 s. The largest proportion in the fourth actuator is over 100% at
t = 0, and at
t = 2.7 s, the largest proportion in the fifth actuator is approximately 60%. Under the second aim, one can also find that at
t = 0.1 s and 3.8 s, the proportion in the fourth actuator is over 350%, and at
t = 2.9 s, 3.7 s, and 4.4 s, the proportion in the fifth actuator is between 50% and 100%. Finally, under the third aim, at
t = 4.6 s, the proportion in the fourth actuator is over 100%. This shows that the friction has negative effects that cannot be ignored in the motion accuracy, and lubrications are needed to reduce wear at HKPs and revolute joints. Additionally, the proportions vary significantly across different optimal goals for torque distributions. Under the third goal, in the first and second actuators, the proportions are limited between
, being very consistent.
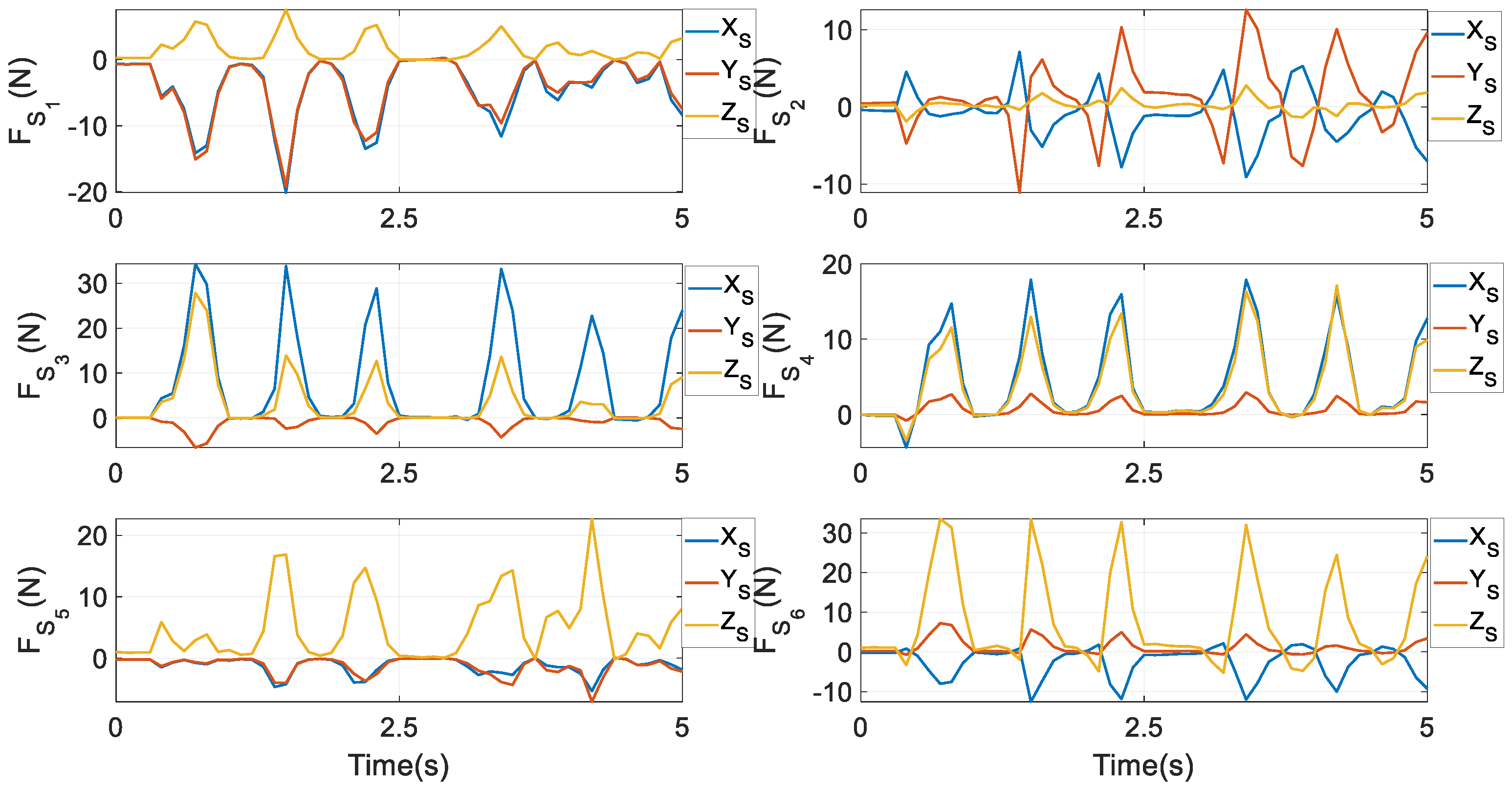
Constraint forces at
Si (
i = 1,…,6) are given in
Figure 12. It is interesting to notice that at
S1, the components along the
XS and
YS axes are nearly equivalent, whilst at
S2, the component along the
YS axis has the highest peak. At
S3 and
S4, the component along the
XS axis experiences the largest magnitude, while at
S5 and
S6, the component along the
ZS axis has the largest magnitude. In Equation (37), from
to constraint forces
at
Gi, only one term
is needed; while in the prototype, the crank is not heavy. As a result, the graphical exhibitions of
and
do not have a significant difference. The figure of
is not provided to save pages. Constraint moments at
Gi around
and
axes are given in
Figure 13. By comparing it with the first column of
Figure 10, apparently, the magnitude of constraint moments is much smaller than that of actuating torques. Under the second and third optimal goals, the profiles of actuating torques and friction torques at revolute joints, constraint forces and friction forces at
Ti (
i =
L,
R), constraint forces at
Si (
i = 1,…,6), and constraint moments at
Gi are similar to their counterparts as in
Figure 8,
Figure 9,
Figure 10 and
Figure 11. Thus, they are not depicted as saving pages.
To make a comparison of dynamic performances under different optimal goals, numerical values of the proposed indices in Equations (73) and (74) are given in
Table 3. The performance indices are always the smallest under the corresponding optimal goals, as remarked in bold, meaning the correctness of the optimisation issues in
Section 4.5. Specifically, under
G3,
F3 is almost zero, so friction forces there can be sharply reduced, and a longer period of utilisation of HKP-related mechanical parts can be permitted. Additionally, due to the correlation between
F2 and
F4~
F6, the smallest
F2 under
G2 also gives rise to the smallest
F4~
F6. Owing to the strong correlation between
F3 and
F7, the smallest
F3 under
G3 also produces the smallest
F7. These numerical results prove the correctness of the computation. The inverse dynamic model using
also reaches the identical remarks as above-mentioned, which can be found in the second row of
Table 3.
The procedures are formatted in Matlab installed on a personal computer with an Intel (R) Xeon (R) W-2235 CPU@3.80 GHz and 32 GB of RAM. The computational time of the target PM using
and
under three different optimal goals is given in the first two clusters of
Figure 14. The dynamic model using Euler parameters to express motions of the end effector is much less time-consuming, which is only approximately 23% of that using Euler angles. Hence, the computational demands can be considerably alleviated by Euler parameters; then real-time control is possible. It apparently proves that in
and parasitic motion variables, the algebraic functions are more efficient than the trigonometric functions, generating a faster dynamic model. Additionally, the computational cost under the third optimal goal is a little heavier than that under the other two goals in the target PM.
5.4. The 6RSS PM
A schematic diagram of the 6RSS PM is displayed in
Figure 15. From the comparison between it and
Figure 1, one can see that clearly the 6RSS PM can be obtained by deleting the DCFB from the end effector, while other items are invariant.
As stated in
Section 5.2, due to DCFB in the target mechanism, an identical twist and its first time-rate of the end effector cannot be achieved by
and
, since DCFB eliminates DOFs and produces parasitic motions. However, in the 6RSS PM with three translational DOFs and three rotational DOFs, both the angular velocity and acceleration of its end effector using Euler parameters can be easily converted to those using Euler angles, and vice versa. The reason is as follows: The two sets of parameters to describe the configuration of the end effector are
where
x,
y, and
z are translational DOFs along the three axes in frame {
S},
e is Euler parameters, and
,
, and
are three
XYZ Euler angles. Since its translations at position, velocity, and acceleration levels are completely independent of these two sets of parameters describing rotations, in the following, only the rotation at its three levels is analysed using Euler parameters and Euler angles. The angular velocity of the end effector using these two sets of parameters is expressed as
and
respectively, where
When the rotation is defined by
e, the three Euler angles can be computed as
where
sij (
i,
j = 1,…,3) means the element at the
ith row and
jth column of the rotation matrix defined by
e. According to Equations (77) and (78), when
it yields
where
is directly inverted if it is not singular. Specifically, when
i.e.,
,
is singular, corresponding to the so-called gimbal lock inherent to Euler angles. However, this configuration can be circumvented in the trajectory planning. Specifically, when tracking the incisor trajectory in
Figure 5, it is not reached, fortunately. Further, the angular acceleration by Euler parameters and Euler angles is
and
respectively. Thus, the second time-rate of
can be computed as
when
.
On the contrary, if the rotation is defined by Euler angles
, one can have the values of
e from Equations (47)–(50) of [
46]
where
tij (
i,
j = 1,…,3) means the element at the
ith row and
jth column of the rotation matrix defined by
. Because the four quantities in
e are not all independent, from Equation (77), one can further write
where
and
means the first time-rate of
e. Thus, all the three terms in
can be computed as
when
is invertible. The reason to choose
e0 in the denominator in
is that in the workspace of the 6RSS PM,
e0 is nonzero. Furthermore, when
, from Equation (86), one can find
Then, from
all four terms in
and
are available numerically. Based on this derivation, for the end effector of the 6RSS PM, two sets of rotational parameters can be available to realise identical rotations at position, velocity, and acceleration levels.
In this regard, by giving the numerical values of
of the target PM directly to
of the 6RSS PM,
can be computed using the procedure in this section, and the end effector of the 6RSS PM can perform identical motions as those of the end effector of the target PM, as shown in
Figure 6, to make a fairer and more convenient comparison in computational demands between dynamic models of these two PMs. The inverse dynamic model of the 6RSS PM can be established following the procedure in
Section 4; henceforth, it is not provided again. Note that because this mechanism has six actuations and six DOFs, its actuating torques have a closed-form solution without the optimisations in
Section 4.5. On this basis, its dynamic performance is shown in the last two lines of
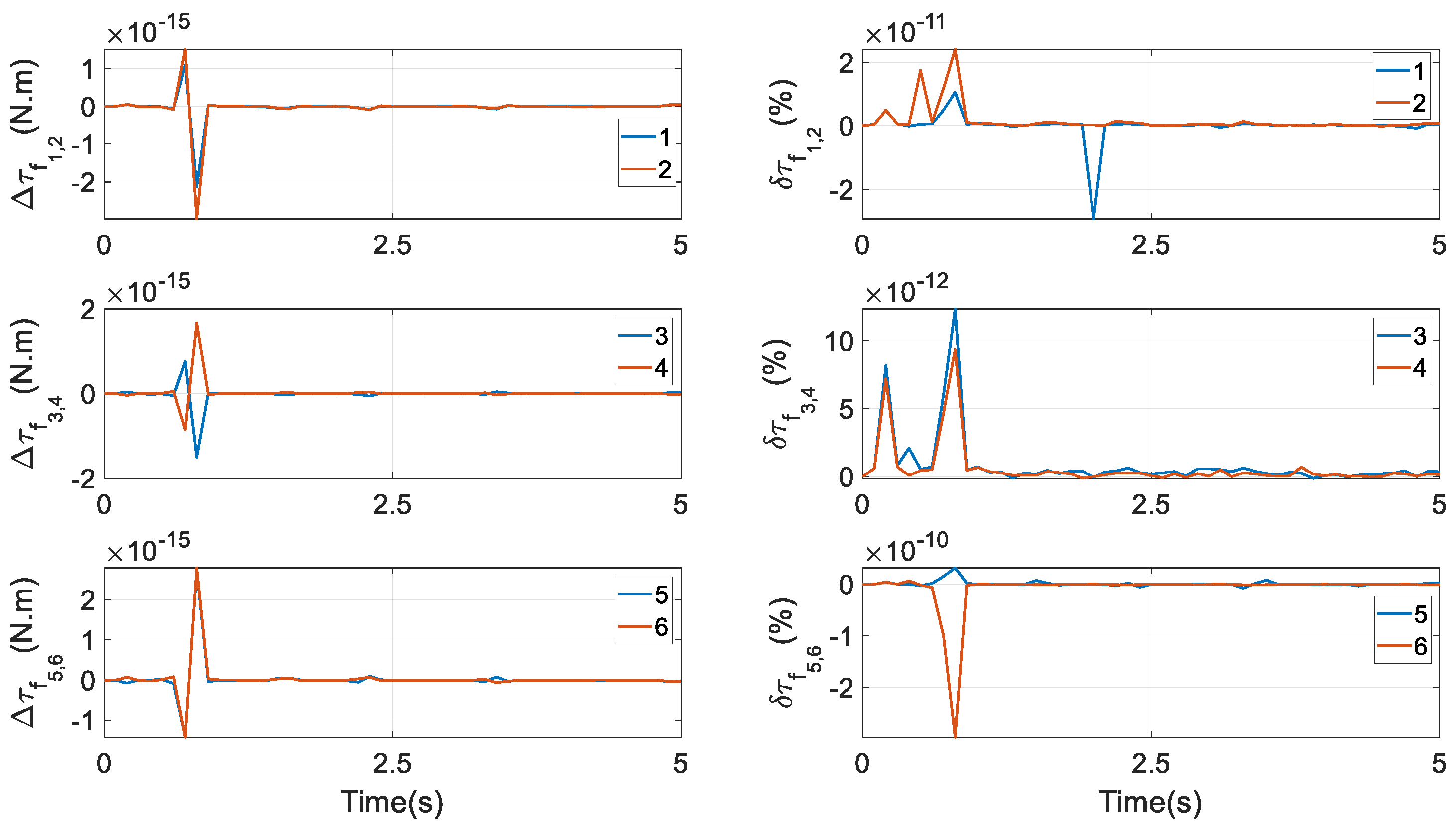
Table 1, where the indices are completely identical. More precisely, the differences
and difference ratios
of actuating torques are given in
Figure 16, where
and are the output torque by the ith actuator and calculated from the model using Euler parameters and Euler angles, respectively. These differences are very minor, indicating that under one identical motion expressed by these two sets of parameters, actuations are invariant. An identical exhibition can also be observed in friction torques at revolute joints. For the sake of brevity, their graph is not provided.
The computational time of the dynamic model of the 6RSS PM using Euler parameters is only approximately 60% of that using Euler angles, as shown in
Figure 14, which again denotes that Euler parameters are more efficient than Euler angles. From the comparison between the mechanism under study and the 6RSS PM in
Figure 14, DCFB significantly raises the modelling burden in kinematics and dynamics. Furthermore, one interesting discovery in
Table 1 is, for the target PM under the third goal, i.e., Equation (54), all indices are close to those of the 6RSS PM, the constraint forces at HKPs being nearly zero, as if in the mechanism under study there were no DCFB to the end effector. Henceforth, the optimisation procedures play an important role in attaining it.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}