
Energy-Efficient Fall-Detection System Using LoRa and Hybrid Algorithms



Abstract
:1. Introduction
2. Related Work
2.1. LPWAN-Based Fall-Detection Systems
2.2. Fall Detection Systems with Hybrid Algorithms
3. Materials and Methods
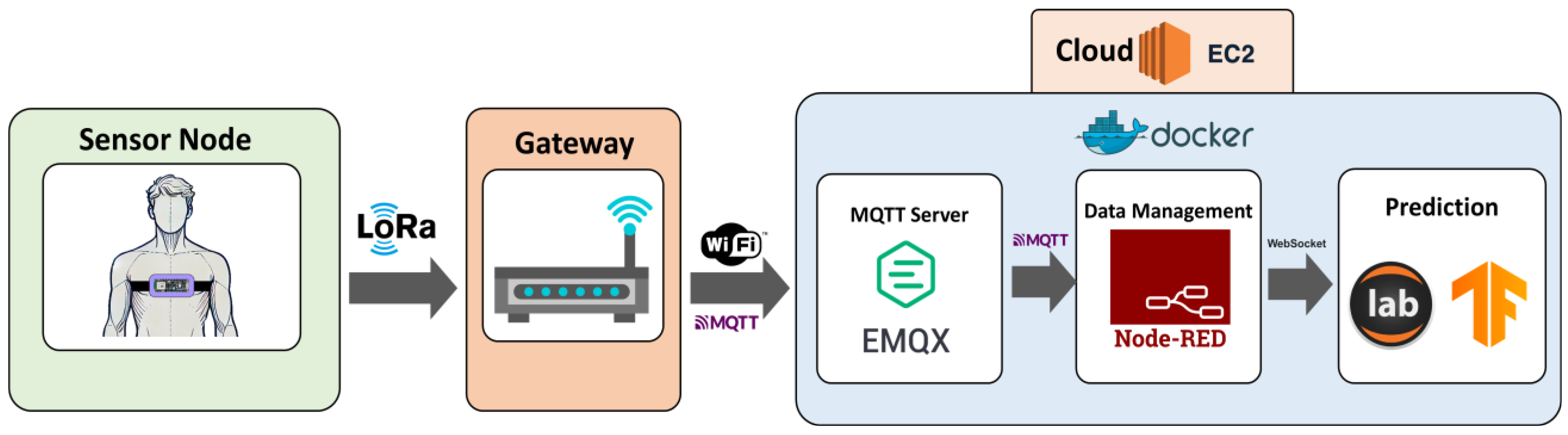
3.1. System Architecture Overview
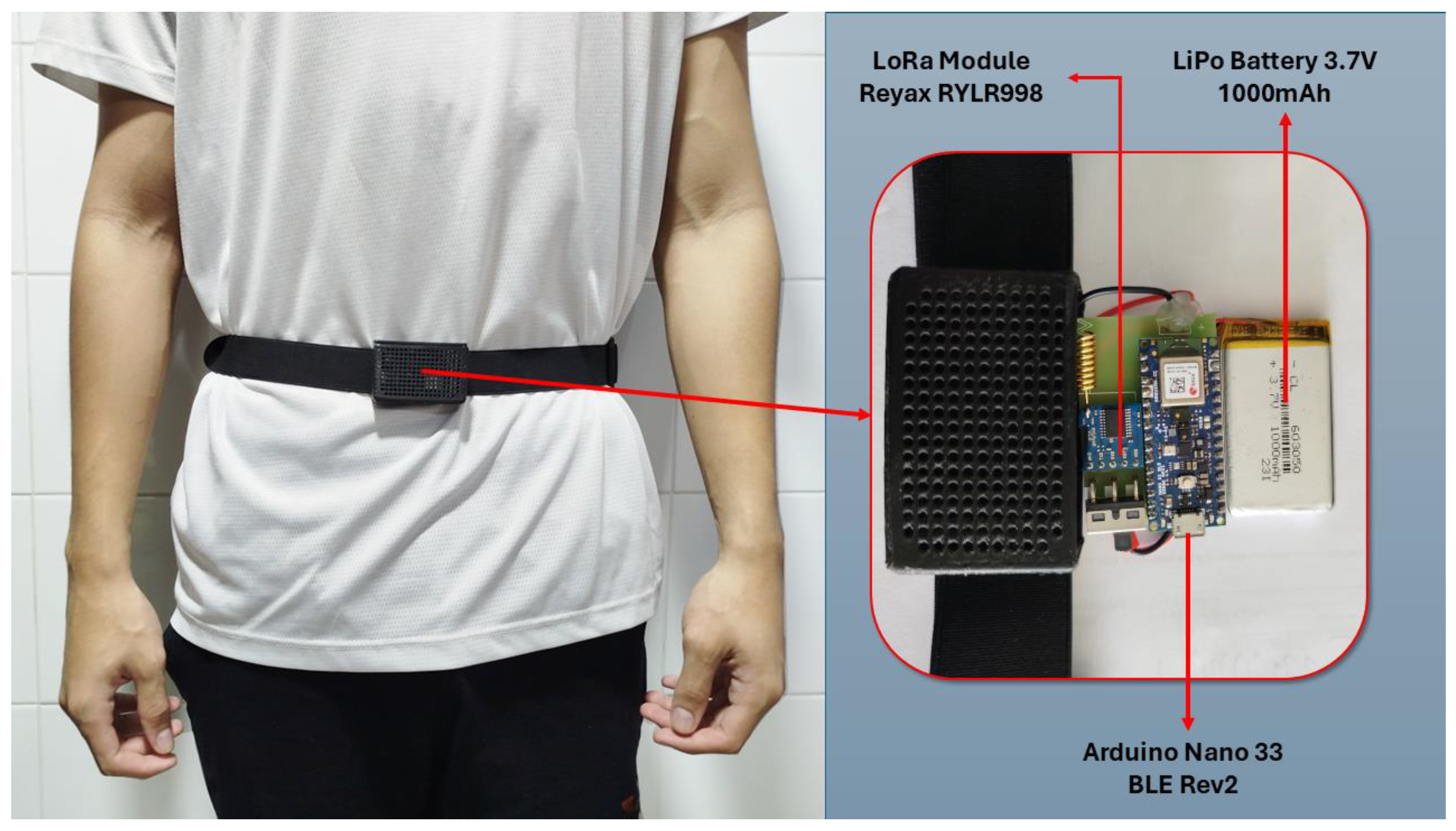
3.1.1. Sensor Node
3.1.2. IoT Gateway for Data Transmission
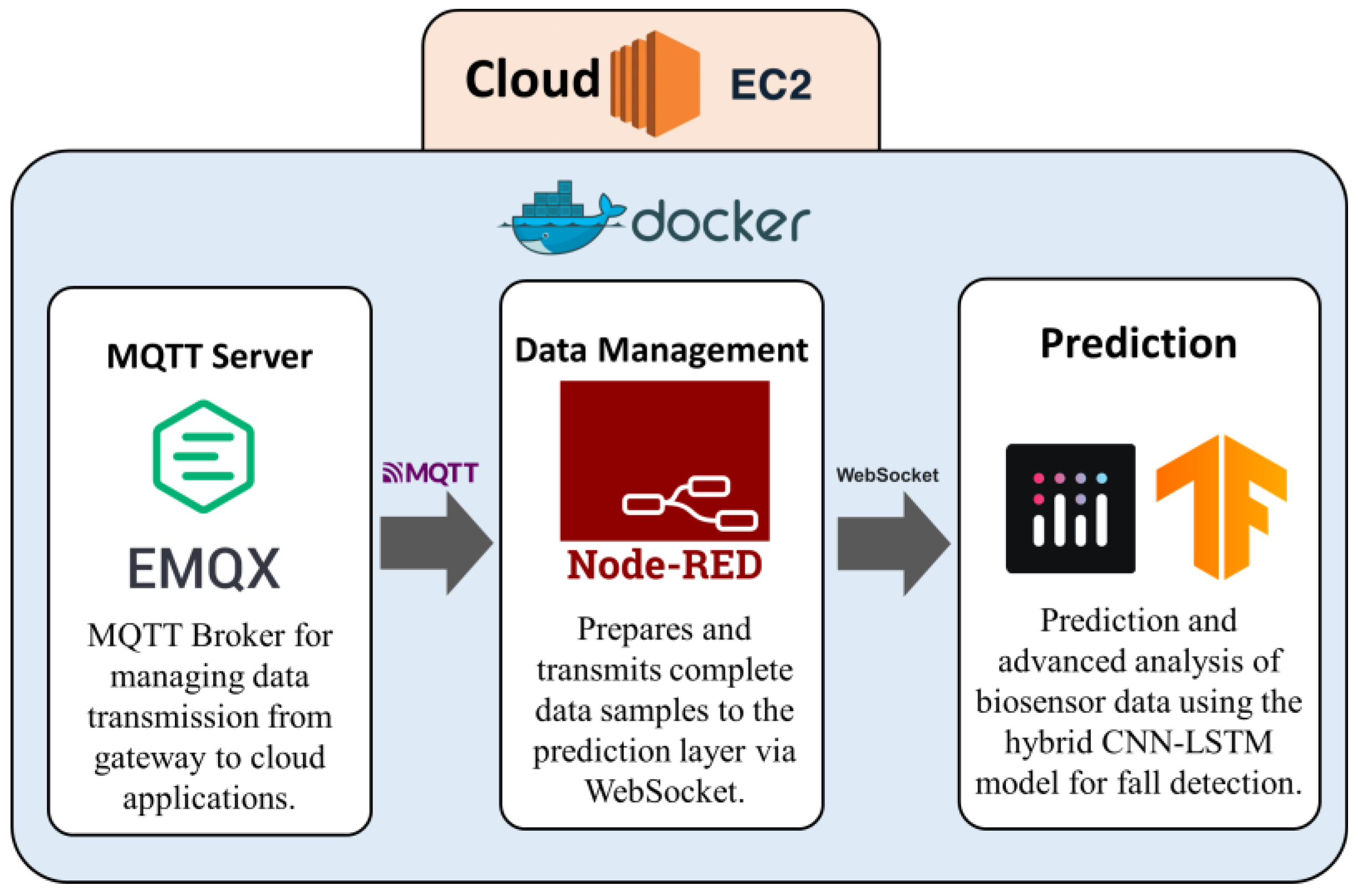
3.1.3. Cloud Processing Layer for Fall Detection
- MQTT EMQX Broker: Receives the 80 acceleration samples corresponding to the 4-s window transmitted from the gateway through MQTT messages.
- Node-RED Container: operates as an intermediary for data management. Through a MQTT subscription to the EMQX broker, the Node-RED container receives the acceleration samples, verifies data integrity, and certifies that the samples are complete and formatted correctly. If missing data is detected, Node-RED applies an interpolation mechanism using the last valid sample to maintain a complete set of 80 samples.
- Movement classifier: Once Node-RED processes and organizes the data, the samples are transmitted via WebSocket to a Python application developed using Dash [61], a framework for building interactive interfaces [61]. The input data undergo Z-score normalization, referencing statistical metrics (mean and standard deviation) derived from the dataset used to train the model. A hybrid CNN-LSTM model then analyzes the data in real time, identifying patterns associated with potential fall events. In addition, in the current status of our prototype, an online application provides a dynamic and user-friendly visualization of both the input data and classification results.
3.2. Cloud Detection System
3.3. Data Preparation and Preprocessing
- Data selection: Only the first three columns of each file were used, corresponding to acceleration measurements from an ADXL345 accelerometer on the X, Y, and Z axes, with an original sampling frequency of 200 Hz. Additional columns containing rotation data and readings from the other accelerometer were excluded since our fall-detection approach exclusively relies on the acceleration magnitude computed from a single accelerometer.
- Conversion to gravity units (g): The ADXL345 sensor data requires conversion to gravity units (g) for accurate interpretation. The transformation follows the equation based on sensor specifications (13-bit resolution and ±16 g range):where the range is ±16 g and the resolution is 13 bits. This conversion standardizes acceleration values across the X, Y, and Z axes for better interpretability and subsequent analysis.
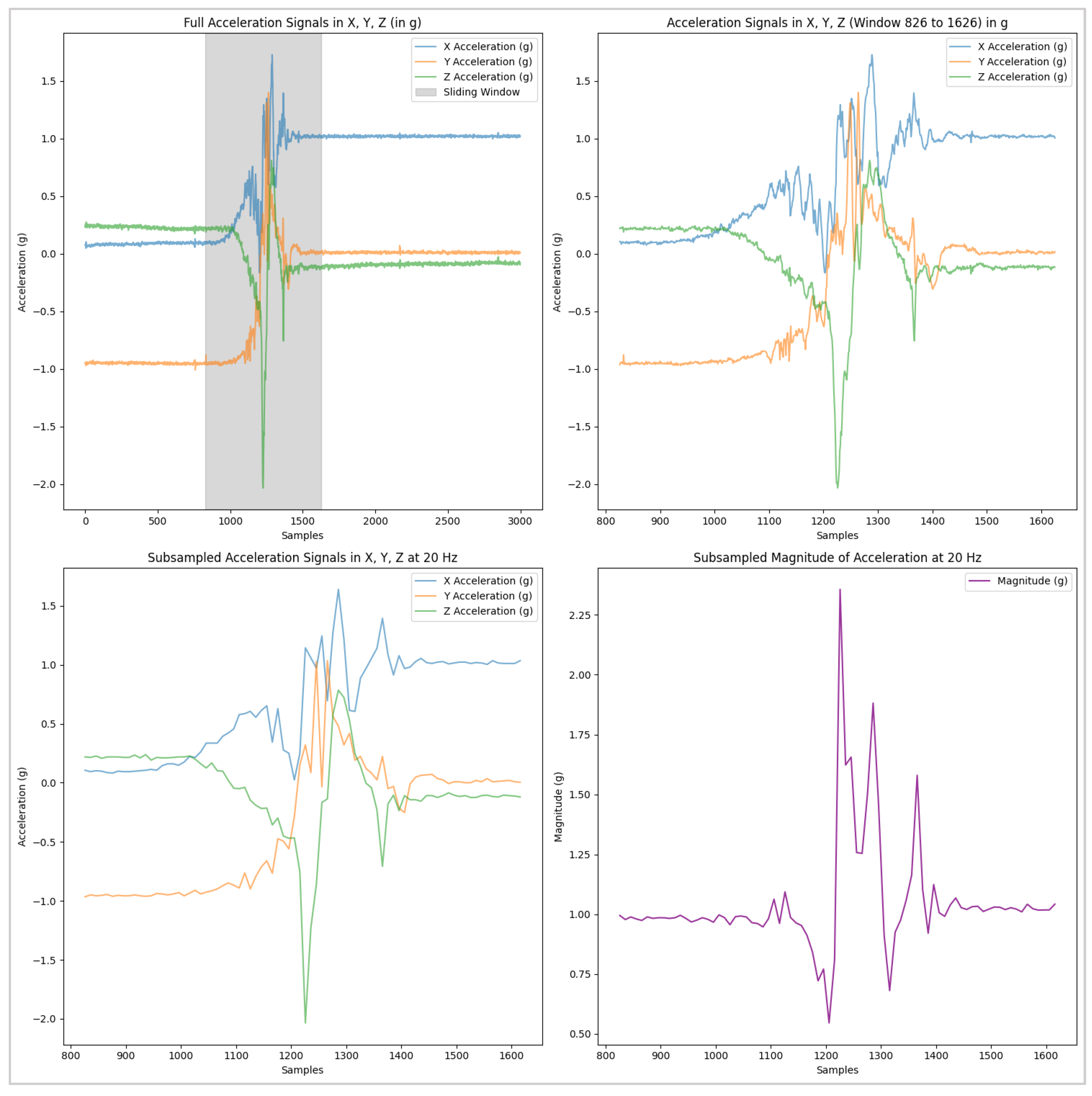
- Segmentation into temporal windows: The duration of the different traces in the Sisfall dataset is extremely variable, ranging from 10 to 180 s. Therefore, for model training, validation, and testing, different 4-s windows (80 samples at 20 Hz) were obtained from the original data. In particular, for each fall, we extracted a single observation window centered around the instant where the acceleration maximum is computed as the rest of the trace is considered not particularly relevant to characterize the dynamics of the fall. As for the ADLs, we selected from each trace at least three 4-s windows that exhibited acceleration peaks likely to be confused with those caused by falls. For this operation, a visual inspection of the signals was combined with the search for the local maxima of the acceleration components. In addition, a downsampling from 200 Hz to 20 Hz was applied to the time series of the patterns to ensure compatibility with the sampling rate of the accelerometer in our prototype. Figure 6 illustrates an example of this process of selection and subsampling accomplished to obtain the final observation windows from one original fall trace in the Sisfall dataset. In the final step (after subsampling), the acceleration magnitude is computed from the acceleration components.
- Z-score standardization: To standardize the measurements and improve model generalization capability by reducing the impact of individual variations in subject acceleration [65], the Z-score normalization was applied to the acceleration data. The formula used is:where each sample within the window has an acceleration magnitude represented by X while μ and σ correspond to the mean and standard deviation, respectively, calculated from the training dataset [63].
- Data Partitioning: To provide a balanced distribution between fall events and daily activities, the dataset was split into three subsets. The division was performed guaranteeing that all subsets include samples of the 19 daily activities and 15 fall simulations executed by the 10 subjects. The training set accounts for 60% of the data, incorporating information from six subjects. Following a leave-2-out evaluation, the validation set comprises 20% of the data, sourced from two subjects not included in the training set, while the test set also includes 20%, using the measurements gathered from two additional different participants. This partitioning ensures a well-represented dataset, enhancing both training reliability and model evaluation [9].
3.4. Evaluation Metrics
4. Results
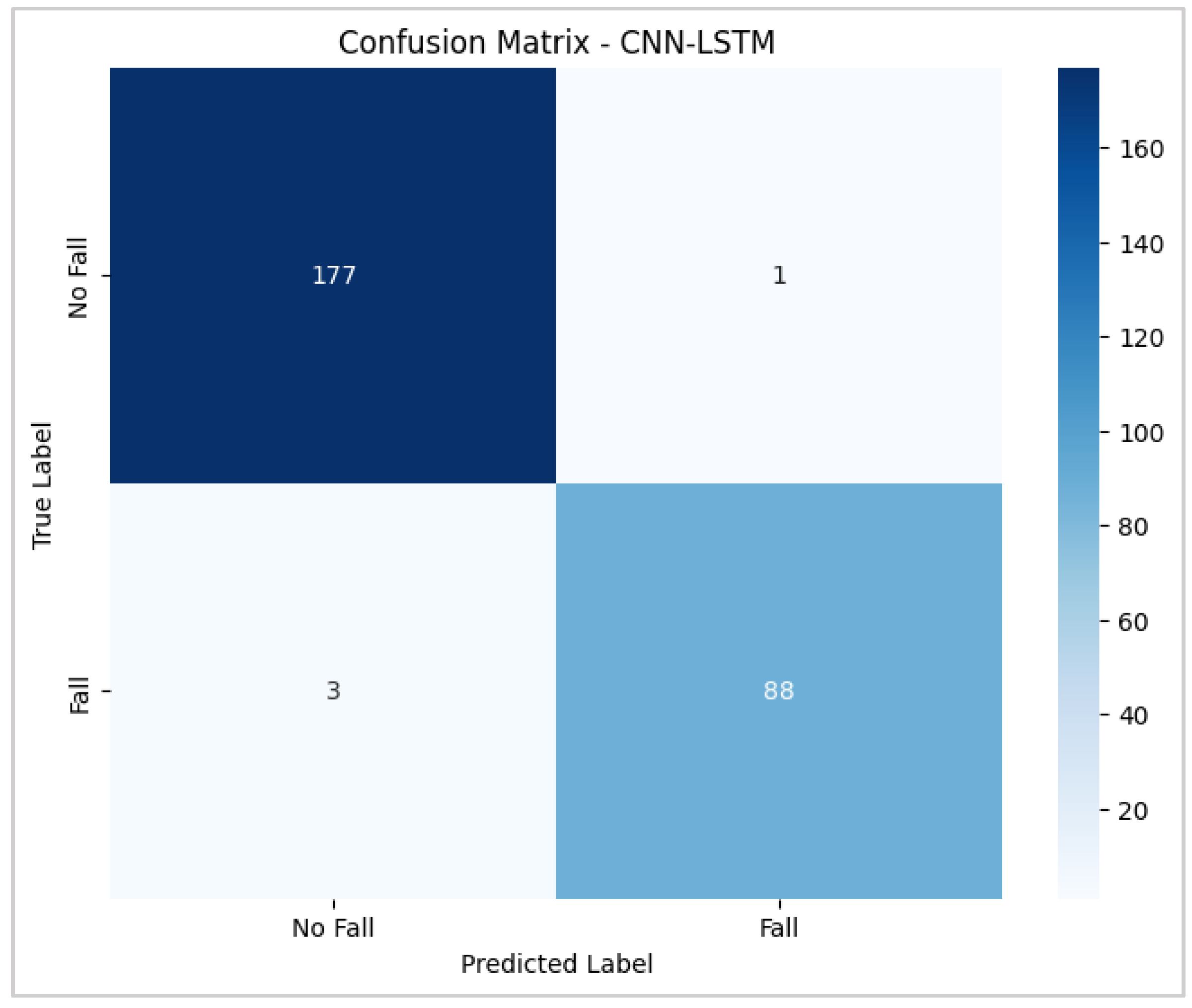
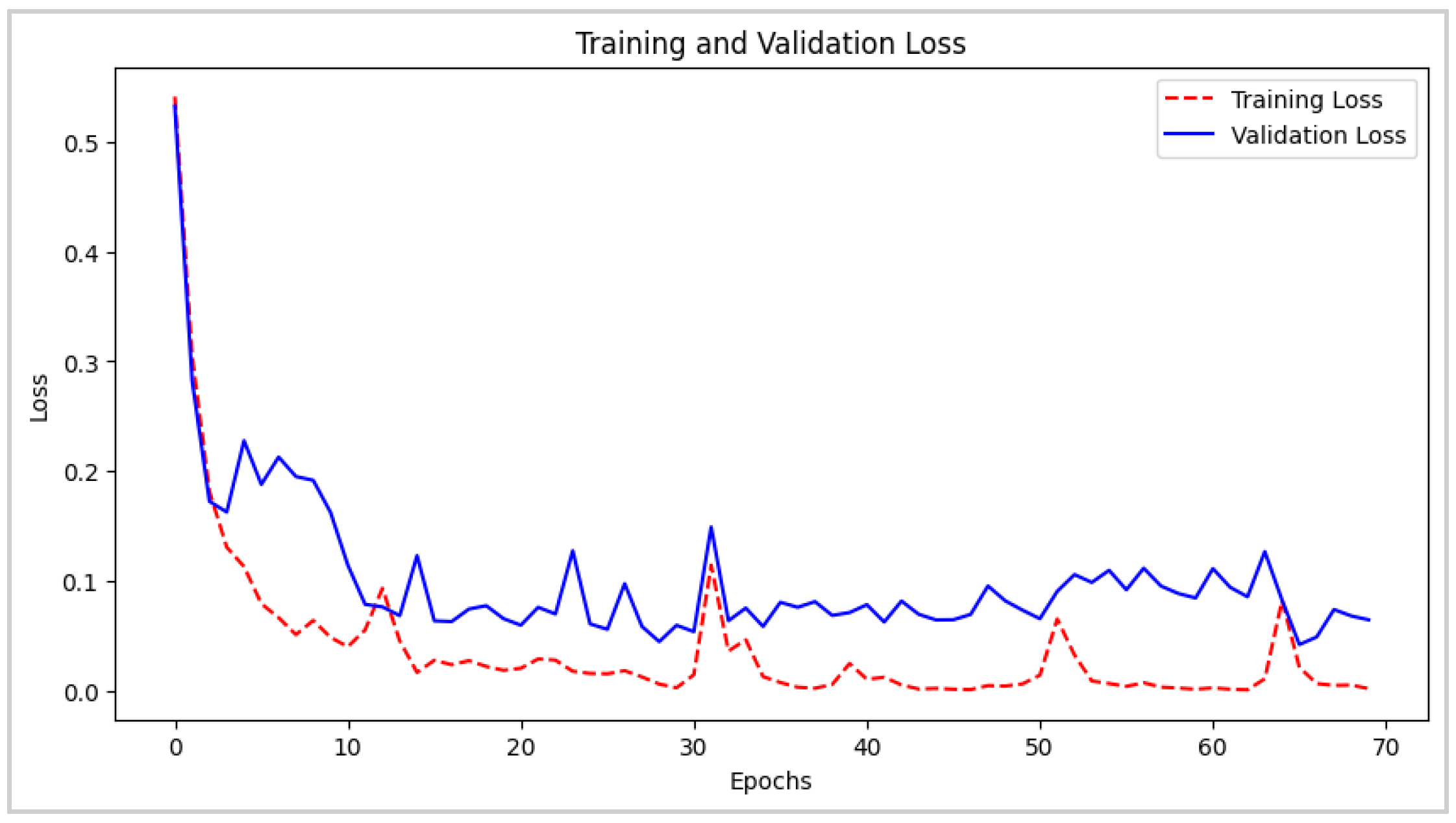
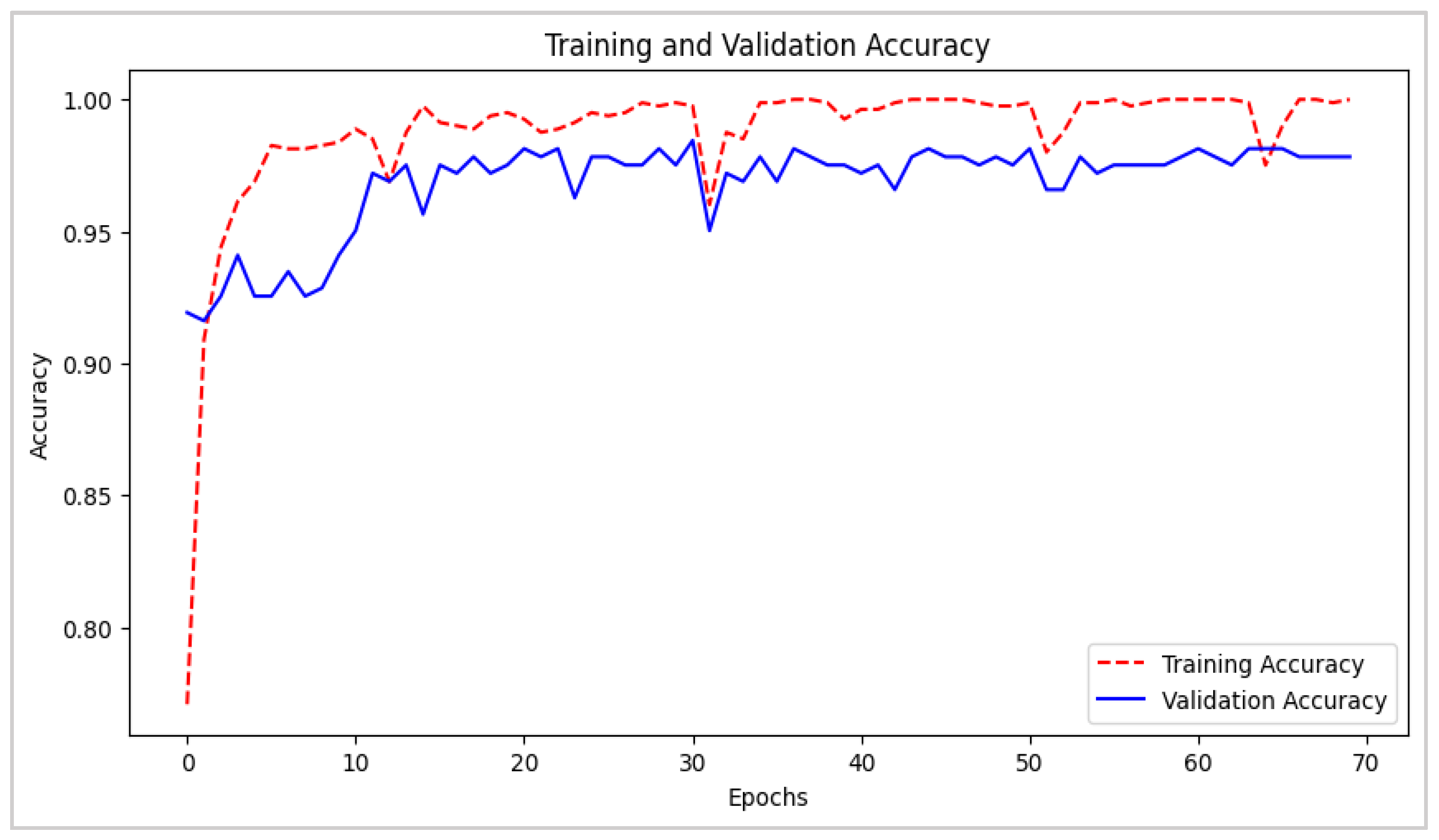
4.1. Evaluation of Model Performance
4.2. Energy Consumption
4.3. Communication via LoRa
4.4. Real-Time Testing of the Detector in a Testbed
4.5. Real-World 24-h Monitoring
4.6. System Cost Breakdown
5. Discussion
6. Conclusions
7. Limitations and Future Recommendations
- While the proposed system showed promising results in detecting falls based on acceleration peaks, it was validated under controlled indoor conditions and scenarios in which subjects typically fall on a hard surface. Future research should explore the system’s behavior under alternative conditions, such as soft surfaces (e.g., grass, mattresses) or falls caused by fainting, where acceleration values may be significantly lower.
- The Arduino Nano 33 BLE Sense general purpose board was used as a development tool for quick prototyping, aiming at leveraging its integrated IMU. However, unused components (e.g., MP34DT05, LPS22HB, HS3003) of the module, even when deactivated for our fall-detection application, may contribute to unnecessary power consumption (in the range of 1–5 μA). Future implementations should adopt a custom low-power embedded design that includes only the IMU.
- Although the system demonstrated reliable performance during real-time operation and 24-h continuous monitoring, future studies should include multi-week deployments to evaluate long-term stability, hardware durability, and operational reliability under real-world conditions.
- Informal feedback from five users indicated positive impressions regarding comfort and wearability, but no formal usability study was conducted. Future work should include structured user-centered evaluations to assess ergonomics and long-term comfort of the device, which is a critical aspect (normally neglected by the related literature) for the practical acceptance of this type of monitoring tool.
- We also recommend that future studies expand the number of participants and evaluated scenarios, incorporating greater user diversity and real-life conditions to enhance the system’s generalizability and applicability in broader contexts.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Ageing and Health. Available online: https://www.who.int/news-room/fact-sheets/detail/ageing-and-health (accessed on 10 April 2023).
- World Health Organization. WHO Global Report on Falls Prevention in Older Age. Available online: https://apps.who.int/iris/handle/10665/43811 (accessed on 26 February 2023).
- World Health Organization. Falls. Available online: https://www.who.int/en/news-room/fact-sheets/detail/falls (accessed on 26 February 2023).
- Tinetti, M.E.; Liu, W.L.; Claus, E.B. Predictors and Prognosis of Inability to Get Up After Falls Among Elderly Persons. JAMA 1993, 269, 65–70. [Google Scholar] [CrossRef]
- Deng, Z.; Guo, L.; Chen, X.; Wu, W. Smart Wearable Systems for Health Monitoring. Sensors 2023, 23, 2479. [Google Scholar] [CrossRef]
- Schnell, B.; Moder, P.; Ehm, H.; Konstantinov, M.; Ismail, M. Challenges in Smart Health Applications Using Wearable Medical Internet-of-Things—A Review. In Proceedings of the Sixth International Congress on Information and Communication Technology; Springer Science and Business Media Deutschland GmbH, London, UK, 25–26 February 2021; Springer: Singapore, 2022; Volume 216, pp. 283–296. [Google Scholar] [CrossRef]
- Qian, Z.; Lin, Y.; Jing, W.; Ma, Z.; Liu, H.; Yin, R.; Li, Z.; Bi, Z.; Zhang, W. Development of a Real-Time Wearable Fall Detection System in the Context of Internet of Things. IEEE Internet Things J. 2022, 9, 21999–22007. [Google Scholar] [CrossRef]
- Tanutama, L.; Wijaya, H.; Ardianti, D. Elderly Fall Detection and Warning System. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 794. [Google Scholar] [CrossRef]
- Salah, O.Z.; Selvaperumal, S.K.; Abdulla, R. Accelerometer-based elderly fall detection system using edge artificial intelligence architecture. Int. J. Electr. Comput. Eng. 2022, 12, 4430–4438. [Google Scholar] [CrossRef]
- Huynh, Q.T.; Nguyen, U.D.; Tran, B.Q. A Cloud-Based System for In-Home Fall Detection and Activity Assessment. In Proceedings of the 7th International Conference on the Development of Biomedical Engineering in Vietnam (BME7), Ho Chi Minh, Vietnam, 27–29 June 2018; Springer: Singapore, 2019; Volume 69, pp. 103–108. [Google Scholar] [CrossRef]
- Chang, W.J.; Chen, L.B.; Chen, M.C.; Su, J.P.; Sie, C.Y.; Yang, C.H. Design and Implementation of an Intelligent Assistive System for Visually Impaired People for Aerial Obstacle Avoidance and Fall Detection. IEEE Sens. J. 2020, 20, 10199–10210. [Google Scholar] [CrossRef]
- Li, Y.; Lin, Z.; Huang, Z.; Cai, Z.; Huang, L.; Wei, Z. A Channel Hopping LoRa Technology Based Emergency Communication System for Elderly People Living Alone. In Proceedings of the 2022 21st International Symposium on Communications and Information Technologies, ISCIT 2022, Xi’an, China, 27–30 September 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 19–26. [Google Scholar] [CrossRef]
- Wu, Y.; Zeng, P.; Ge, H. A Research of Fall Detection Module Based on NB-IOT. In Proceedings of the 2022 7th International Conference on Computer and Communication Systems, ICCCS 2022, Wuhan, China, 22–25 April 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 197–201. [Google Scholar] [CrossRef]
- Liu, P.; Pan, J.; Zhu, H.; Li, Y. A Wearable Fall Detection System Based on 1D CNN. In Proceedings of the 2021 2nd International Conference on Artificial Intelligence and Computer Engineering, ICAICE 2021, Hangzhou, China, 5–7 November 2021 ; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 200–203. [Google Scholar] [CrossRef]
- Pena Queralta, J.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Edge-AI in LoRa-based health monitoring: Fall detection system with fog computing and LSTM recurrent neural networks. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing, TSP 2019, Budapest, Hungary, 1–3 July 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 601–604. [Google Scholar] [CrossRef]
- Cai, W.Y.; Guo, J.H.; Zhang, M.Y.; Ruan, Z.X.; Zheng, X.C.; Lv, S.S. GBDT-Based Fall Detection with Comprehensive Data from Posture Sensor and Human Skeleton Extraction. J. Healthc. Eng. 2020, 2020, 8887340. [Google Scholar] [CrossRef] [PubMed]
- Linhares, Í.; Andrade, R.M.C.; Júnior, E.C.; Oliveira, P.A.; Oliveira, B.; Aguilar, P. Lessons Learned from the Development of Mobile Applications for Fall Detection. In Proceedings of the Global Health 2020: The Ninth International Conference on Global Health Challenges, Nice, France, 25–29 October 2020; International Academy, Research, and Industry Association: Wilmington, DE, USA, 2020; pp. 10–25. [Google Scholar]
- Yuan, J.; Tan, K.K.; Lee, T.H.; Koh, G.C.H. Power-efficient interrupt-driven algorithms for fall detection and classification of activities of daily living. IEEE. Sens. J. 2015, 15, 1377–1387. [Google Scholar] [CrossRef]
- Xu, T.; Se, H.; Liu, J. A two-step fall detection algorithm combining threshold-based method and convolutional neural network. Metrol. Meas. Syst. 2021, 28, 23–40. [Google Scholar] [CrossRef]
- Shahzad, A.; Kim, K. FallDroid: An Automated Smart-Phone-Based Fall Detection System Using Multiple Kernel Learning. IEEE Trans. Industr. Inform. 2019, 15, 35–44. [Google Scholar] [CrossRef]
- Abbate, S.; Avvenuti, M.; Bonatesta, F.; Cola, G.; Corsini, P.; Vecchio, A. A smartphone-based fall detection system. Pervasive. Mob. Comput. 2012, 8, 883–899. [Google Scholar] [CrossRef]
- De Raeve, N.; Shahid, A.; De Schepper, M.; De Poorter, E.; Moerman, I.; Verhaevert, J.; Van Torre, P.; Rogier, H. Bluetooth-Low-Energy-Based Fall Detection and Warning System for Elderly People in Nursing Homes. J. Sens. 2022, 2022, 9930681. [Google Scholar] [CrossRef]
- Cruz, F.R.G.; Sejera, M.P.; Bunnao, M.B.G.; Jovellanos, B.R.; Maaño, P.L.C.; Santos, C.J.R. Santos Fall Detection Wearable Device Interconnected Through ZigBee Network. In Proceedings of the IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Manila, Philippines, 1–3 December 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Liang, J.; Huang, Y.; Huang, Z. Fall Detection System Based on Millimeter Wave Radar and Machine Learning. In Proceedings of the 2022 6th International Conference on Robotics and Automation Sciences, ICRAS 2022, Wuhan, China, 9–11 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 178–183. [Google Scholar] [CrossRef]
- Patel, W.D.; Ramani, B.; Pandya, S.; Bhaskar, S.; Koyuncu, B.; Ghayvat, H. NXTGeUH: LoRaWAN based NEXT Generation Ubiquitous Healthcare System for Vital Signs Monitoring & Falls Detection. In Proceedings of the 2018 IEEE Punecon, Pune, India, 30 November–2 December 2018; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Valach, A.; Macko, D. Exploration of the LoRa Technology Utilization Possibilities in Healthcare IoT Devices. In Proceedings of the 2018 16th International Conference on Emerging eLearning Technologies and Applications (ICETA), Stary Smokovec, Slovakia, 15–16 November 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Scheurer, S.; Koch, J.; Kucera, M.; Bryn, H.; Bärtschi, M.; Meerstetter, T.; Nef, T.; Urwyler, P. Optimization and technical validation of the AIDE-MOI fall detection algorithm in a real-life setting with older adults. Sensors 2019, 19, 1357. [Google Scholar] [CrossRef]
- Lachtar, A.; Val, T.; Kachouri, A. Elderly monitoring system in a smart city environment using LoRa and MQTT. IET Wirel. Sens. Syst. 2020, 10, 70–77. [Google Scholar] [CrossRef]
- Zanaj, E.; Disha, D.; Spinsante, S.; Gambi, E. A wearable fall detection system based on LoRa LPWAN technology. J. Commun. Softw. Syst. 2020, 16, 232–242. [Google Scholar] [CrossRef]
- Wong, W.-K.; Hou, L.-Y.; Pan, T.; Wu, C.-C.; Chen, Y.-H. An IoT Application Based on LoRa Data Transmission. InternatIonal J. IntellIgent Technol. Appl. Stat. 2022, 15, 87–100. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Nolan, K.E.; Guibene, W.; Kelly, M.Y. An evaluation of low power wide area network technologies for the Internet of Things. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference, IWCMC 2016, Paphos, Cyprus, 5–9 September 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 439–444. [Google Scholar] [CrossRef]
- Manatarinat, W.; Poomrittigul, S.; Tantatsanawong, P. Narrowband-internet of things (NB-IoT) system for elderly healthcare services. In Proceedings of the 5th International Conference on Engineering, Applied Sciences and Technology, ICEAST 2019, Luang Prabang, Laos, 2–5 July 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Escriba, C.; Roux, J.; Hajjine, B.; Fourniols, J.Y. Smart wearable active patch for elderly health prevention. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence, CSCI 2018, Las Vegas, NV, USA, 12–14 December 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 1040–1043. [Google Scholar] [CrossRef]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef]
- Vavoulas, G.; Pediaditis, M.; Spanakis, E.G.; Tsiknakis, M. The MobiFall dataset: An initial evaluation of fall detection algorithms using smartphones. In Proceedings of the 13th IEEE International Conference on BioInformatics and BioEngineering, IEEE BIBE 2013, Chania, Greece, 10–13 November 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Fan, X.; Li, Z.; Zhang, L. Design and Implementation of Fall Detection Equipment for the Elderly Based on NB-IoT. In Proceedings of the 2022 International Conference on Artificial Intelligence and Computer Information Technology (AICIT), Yichang, China, 16–18 September 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Pierleoni, P.; Belli, A.; Palma, L.; Concetti, R.; Sabbatini, L.; Raggiunto, S. A complete architecture for Ambient Assisted Living scenarios using a cross protocol proxy. J. Ambient. Intell. Humaniz. Comput. 2023, 15, 2757–2764. [Google Scholar] [CrossRef]
- Casamassima, F.; Farella, E.; Benini, L. Context aware power management for motion-sensing body area network nodes. Des. Autom. Test Eur. Conf. Exhib. 2014, 1–6. [Google Scholar] [CrossRef]
- Mao, W.L.; Wang, C.C.; Chou, P.H.; Liu, K.C.; Tsao, Y. MECKD: Deep Learning-Based Fall Detection in Multi-Layer Mobile Edge Computing with Knowledge Distillation. IEEE Sens. J. 2024, 24, 42195–42209. [Google Scholar] [CrossRef]
- Fernandez-Bermejo, J.; Martinez-del-Rincon, J.; Dorado, J.; Del Toro, X.; Santofimia, M.J.; Lopez, J.C. Edge computing transformers for fall detection in older adults. Int. J. Neural. Syst. 2024, 34, 2450026. [Google Scholar] [CrossRef] [PubMed]
- Fang, K.; Pan, J.; Li, L.; Xiang, R. A Novel Fall Detection Framework Using Skip-DSCGAN Based on Inertial Sensor Data. Comput. Mater. Contin. 2024, 78, 493–514. [Google Scholar] [CrossRef]
- Sarwar, M.A.; Chea, B.; Widjaja, M.; Saadeh, W. An AI-Based Approach for Accurate Fall Detection and Prediction Using Wearable Sensors. In Proceedings of the Midwest Symposium on Circuits and Systems, Springfield, MA, USA, 11–14 August 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 118–121. [Google Scholar] [CrossRef]
- Arduino Nano 33 BLE Sense Rev2|Arduino Documentation. Available online: https://docs.arduino.cc/hardware/nano-33-ble-sense-rev2/ (accessed on 3 September 2024).
- Kangas, M.; Konttila, A.; Lindgren, P.; Winblad, I.; Jämsä, T. Comparison of low-complexity fall detection algorithms for body attached accelerometers. Gait Posture 2008, 28, 285–291. [Google Scholar] [CrossRef] [PubMed]
- Gjoreski, H.; Luštrek, M.; Gams, M. Accelerometer placement for posture recognition and fall detection. In Proceedings of the 2011 7th International Conference on Intelligent Environments, IE 2011, Nottingham, UK, 25–28 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 47–54. [Google Scholar] [CrossRef]
- Andrade, R.O.; Yoo, S.G. A comprehensive study of the use of LoRa in the development of smart cities. Appl. Sci. 2019, 9, 4753. [Google Scholar] [CrossRef]
- Casilari, E.; Álvarez-Marco, M.; García-Lagos, F. A Study of the Use of Gyroscope Measurements in Wearable Fall Detection Systems. Symmetry 2020, 12, 649. [Google Scholar] [CrossRef]
- Casilari, E.; Santoyo-Ramón, J.A.; Cano-García, J.M. UMAFall: A Multisensor Dataset for the Research on Automatic Fall Detection. Procedia Comput. Sci. 2017, 110, 32–39. [Google Scholar] [CrossRef]
- Mathie, M.J.; Coster, A.C.F.; Lovell, N.H.; Celler, B.G. Accelerometry: Providing an integrated, practical method for long-term, ambulatory monitoring of human movement. Physiol. Meas. 2004, 25, R1. [Google Scholar] [CrossRef]
- Antonsson, E.K.; Mann, R.W. The frequency content of gait. J. Biomech. 1985, 18, 39–47. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; Wiley: Hoboken, NJ, USA, 2009; pp. 1–370. [Google Scholar] [CrossRef]
- Ibrahim, A.; Younis, M.I. Simple Fall Criteria for MEMS Sensors: Data Analysis and Sensor Concept. Sensors 2014, 14, 12149–12173. [Google Scholar] [CrossRef]
- Paoli, R.; Fernández-Luque, F.J.; Doménech, G.; Martínez, F.; Zapata, J.; Ruiz, R. A system for ubiquitous fall monitoring at home via a wireless sensor network and a wearable mote. Expert. Syst. Appl. 2012, 39, 5566–5575. [Google Scholar] [CrossRef]
- Viet, V.Q.; Lee, G.; Choi, D. Fall detection based on movement and smart phone technology. In Proceedings of the 2012 IEEE RIVF International Conference on Computing and Communication Technologies, Research, Innovation, and Vision for the Future, RIVF 2012, Ho minh City, Vietnam, 1–4 November 2010; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Xu, J.; He, Z.; Zhang, Y. CNN-LSTM Combined Network for IoT Enabled Fall Detection Applications. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1267. [Google Scholar] [CrossRef]
- MQTT. The Standard for IoT Messaging. Available online: https://mqtt.org/ (accessed on 30 March 2025).
- Docker. Accelerated Container Application Development. Available online: https://www.docker.com/ (accessed on 30 March 2025).
- EMQX. The Unified MQTT and AI Platform. Available online: https://www.emqx.com/en (accessed on 30 March 2025).
- Node-RED. Low-Code Programming for Event-Driven Applications. Available online: https://nodered.org/ (accessed on 30 March 2025).
- Plotly Technologies Inc. Dash User Guide. Available online: https://dash.plotly.com/ (accessed on 1 March 2025).
- Bergstra, J.; Ca, J.B.; Ca, Y.B. Random Search for Hyper-Parameter Optimization Yoshua Bengio. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Wang, L.; Peng, M.; Zhou, Q.F. Fall Detection Based on Convolutional Neural Networks Using Smart Insole. In Proceedings of the 5th International Conference on Control, Automation and Robotics, ICCAR 2019, Beijing, China, 19–22 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 593–598. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, Z.; Dai, H.; Xia, X. Efficient fall detection in four directions based on smart insoles and RDAE-LSTM model. Expert Syst. Appl. 2022, 205, 117661. [Google Scholar] [CrossRef]
- Wang, L.; Peng, M.; Zhou, Q. Pre-Impact Fall Detection Based on Multi-Source CNN Ensemble. IEEE Sens. J. 2020, 20, 5442–5451. [Google Scholar] [CrossRef]
- Li, J.; Gao, M.; Li, B.; Zhou, D.; Zhi, Y.; Zhang, Y. KAMTFENet: A fall detection algorithm based on keypoint attention module and temporal feature extraction. Int. J. Mach. Learn. Cybern. 2023, 14, 1831–1844. [Google Scholar] [CrossRef]
- Shipkovenski, G.; Byalmarkova, P.; Kalushkov, T.; Valcheva, D.; Petkov, E.; Koleva, Z. Accelerometer Based Fall Detection and Location Tracking System of Elderly. In Proceedings of the 6th International Symposium on Multidisciplinary Studies and Innovative Technologies, Ankara, Turkey, 20–22 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 923–928. [Google Scholar] [CrossRef]
- Fluke. Corporation Fluke 87V Industrial Multimeter. Available online: https://www.fluke.com/en-us/product/electrical-testing/digital-multimeters/fluke-87v?srsltid=AfmBOooJnRXcXwYFuLm84QIvelnrz2zzALkt7xdUVKprXoYx3qbCL0TG (accessed on 3 March 2025).
- Ugwuanyi, S.; Paul, G.; Irvine, J. Survey of IoT for Developing Countries: Performance Analysis of LoRaWAN and Cellular NB-IoT Networks. Electronics 2021, 10, 2224. [Google Scholar] [CrossRef]
- Verma, N.; Singh, S.; Prasad, D. A Review on existing IoT Architecture and Communication Protocols used in Healthcare Monitoring System. J. Inst. Eng. 2021, 103, 245. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Mohammed, S.L.; Al-Naji, A.; Abu-AlShaeer, M.J.; Jawad, H.M.; Jawad, A.M.; Chahl, J. Accurate Fall Detection and Localization for Elderly People Based on Neural Network and Energy-Efficient Wireless Sensor Network. Energies 2018, 11, 2866. [Google Scholar] [CrossRef]
- Casilari, E.; Silva, C.A. An analytical comparison of datasets of Real-World and simulated falls intended for the evaluation of wearable fall alerting systems. Measurement 2022, 202, 111843. [Google Scholar] [CrossRef]
- Stack, E. Falls are unintentional: Studying simulations is a waste of faking time. J. Rehabil. Assist. Technol. Eng. 2017, 4, 205566831773294. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | LPWAN Technology * | Sensor ** | Algorithm Type | Accuracy | Sensitivity | Specificity | Battery Life | Transceiver |
|---|---|---|---|---|---|---|---|---|
| Escriba et al. [34] | Sigfox | Acc | - | - | - | - | 3 days (low-power)/13 h (GPS), 30 mAh | N/A |
| Patel et al. [25] | LoRaWAN | Acc | Thresholding policies | 96.93% | 100% | 94.25% | - | - |
| Valach et al. [26] | LoRaWAN | Acc | - | - | - | - | - | RFM95W |
| Manatarinat et al. [33] | NB-IoT | Acc & Gyr | - | - | - | - | - | - |
| Pena Queralta et al. [15] | LoRa | Acc, Gyr, Mag | LSTM | 91.90% | 95.3% | - | - | - |
| Scheurer et al. [27] | LoRa | Acc | - | - | - | - | - | EM9209 |
| Cai et al. [16] | NB-IoT | Acc & Gyr | GBDT (acceleration dataset) | 89.2% | - | - | - | - |
| Chang et al. [11] | LoRa | Acc, Gyr and IR (Infrared) | Thresholding policies | 98.3% | - | - | - | - |
| Huynh et al. [10] | LoRa | Acc, Gyr, Mag | Thresholding policies | N/A | 96.3% | 96.2% | 1 week–1 month | - |
| Lachtar et al. [28] | LoRa | Acc, Gyr, Mag | - | - | - | - | - | RFM95/96/97/98(W) |
| Zanaj et al. [29] | LoRaWAN | Acc, Gyr, Mag | - | - | - | - | 23 h (500 mA/h), 36 h (800 mA/h) | SX1257 |
| Liu et al. [14] | NB-IoT | Acc, Gyr, Mag | CNN | 98.85% | 98.86% | 99.84% | - | - |
| Fan et al. [37] | NB-IoT | Acc & Gyr | - | - | - | - | - | M5310A |
| Li et al. [12] | LoRa | Acc & Gyr | Thresholding policies | 85% | - | - | - | N/A |
| Qian et al. [7] | NB-IoT | Acc & Gyr | Thresholding policies | 94.88% | 95.25% | 94.5% | - | BC-95 |
| Salah et al. [9] | LoRa | Acc | K-NN (15 neighbors) | 78.64% | 81.07% | 76.57% | More than 53 h (2000 mAh) | RFM95W |
| K-NN (5 neighbors) | 79.11% | 80.06% | 78.21% | |||||
| CNN | 95.55% | 95.1% | 94.86 | |||||
| LSTM | 96.78% | 97.87% | 95.21% | |||||
| SVM | 82.27% | 87.21% | 78.48% | |||||
| Wong et al. [30] | LoRa | Acc, Gyr, Mag | - | - | - | - | - | SX1278 RA-02 |
| Wu et al. [13] | NB-IoT | Acc & Gyr | Thresholding policies | 90.1% | - | - | - | - |
| GRU | 92.9% | - | - | |||||
| Pierleoni et al. [38] | NB-IoT | Acc, Gyr, Mag | - | - | - | - | - | nRF9160 |
| Component | Equation | Equation Number |
|---|---|---|
| Forget Gate | (3) | |
| Input Gate | (4) | |
| Cell Candidate | (5) | |
| Memory Update | (6) | |
| Output Gate | (7) | |
| Output | (8) |
| Model | Accuracy (%) | Sensitivity (%) | Specificity (%) |
|---|---|---|---|
| K-NN (5 neighbors) | 92.57 | 91.21 | 93.26 |
| K-NN (15 neighbors) | 92.19 | 91.21 | 92.70 |
| SVM | 91.82 | 93.41 | 91.01 |
| CNN | 95.54 | 91.21 | 97.75 |
| LSTM (with Batch Norm.) | 93.31 | 87.91 | 96.07 |
| CNN–LSTM | 98.51 | 96.70 | 99.44 |
| Operating State | Current (mA) | Description |
|---|---|---|
| Microcontroller active with LoRa module active | 24.3 | The microcontroller processes data, and the LoRa module is active without data transmission. |
| Microcontroller active with LoRa module suspended | 8.2 | The microcontroller captures accelerometer data, while the LoRa module remains suspended. |
| Microcontroller in sleep mode with LoRa module suspended | 4.5 | The microcontroller operates in low-power mode, waking up only to capture data at 20 Hz. |
| Data transmission | 56.2 | The LoRa module transmits 4-s data windows. |
| Test Scenario | Distance (m) | PRR (%) | SNR (dB) | RSSI (dBm) | Obstacles | Gateway Configuration |
|---|---|---|---|---|---|---|
| Indoor (line-of-sight) | 15 | 100.00 | 14 | −49 | None | Gateway on the same floor |
| Indoor (non-line-of-sight) | 50 | 95.00 | 8 | −88 | five hollow brick walls | Gateway on the same floor |
| Indoor (from an upper floor) | 10 | 98.75 | 12 | −75 | one floor (concrete slab) | Gateway on the lower floor |
| Suburban (line-of-sight) | 360 | 100.00 | −2 | −82 | None | Gateway at 40 m altitude |
| Urban | 750 | 87.00 | −6 | −91 | Buildings and trees | Gateway on the 13th floor of a building |
| Description of the Simulated Falls | Number of Falls | Number of Falls Presumed by Thresholding | Number of Falls Identified by the CNN-LSTM Model | Global Sensitivity (%) |
|---|---|---|---|---|
| Forward fall ending in a lying position | 15 | 15 | 15 | 100.00% |
| Lateral fall | 15 | 15 | 14 | 93.33% |
| Backward fall with rotation, ending face-down | 15 | 15 | 14 | 93.33% |
| Backward fall ending in a supine position | 15 | 15 | 15 | 100.00% |
| Total | 60 | 60 | 58 | 96.67% |
| Description | Number of Movements | Movements Ignored by Thresholding | Classified as Non-Fall by CNN-LSTM | Specificity (%) |
|---|---|---|---|---|
| Lying down and getting up | 15 | 14 | 1/1 | 100.00% |
| Sitting in a chair and standing up again | 15 | 14 | 1/1 | 100.00% |
| Walking | 15 | 15 | 0/0 | 100.00% |
| Bending down and standing up | 15 | 13 | 2/2 | 100.00% |
| Component | Description | Quantity | Unit Cost (USD) * | Total (USD) |
|---|---|---|---|---|
| Arduino Nano 33 BLE Rev2 | Main microcontroller unit with integrated BLE | 1 | $29 | $29 |
| Reyax RYLR998 | LoRa transceiver module | 2 | $13 | $26 |
| ESP32 DevKitC | Gateway microcontroller with Wi-Fi | 1 | $10 | $10 |
| Custom PCB via JLCPCB | Fabricated double-layer PCB board | 1 | $5 | $5 |
| 3D-Printed Enclosure + TPU | PLA enclosure with flexible rubber case | 1 | $7 | $7 |
| Battery + Connectors | Li-Po battery, wiring, pin headers | 1 | $6 | $6 |
| Hardware Subtotal | Total for wearable and gateway hardware | — | — | $83 |
| AWS EC2 t2.micro (monthly) | Cloud instance for model inference/storage | 1 month | $8.35 | $8.35 |
| Total Estimated Cost | Includes hardware and one-month cloud service | — | — | $91.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villa, M.; Casilari, E. Energy-Efficient Fall-Detection System Using LoRa and Hybrid Algorithms. Biomimetics 2025, 10, 313. https://doi.org/10.3390/biomimetics10050313
Villa M, Casilari E. Energy-Efficient Fall-Detection System Using LoRa and Hybrid Algorithms. Biomimetics. 2025; 10(5):313. https://doi.org/10.3390/biomimetics10050313
Chicago/Turabian StyleVilla, Manny, and Eduardo Casilari. 2025. "Energy-Efficient Fall-Detection System Using LoRa and Hybrid Algorithms" Biomimetics 10, no. 5: 313. https://doi.org/10.3390/biomimetics10050313
APA StyleVilla, M., & Casilari, E. (2025). Energy-Efficient Fall-Detection System Using LoRa and Hybrid Algorithms. Biomimetics, 10(5), 313. https://doi.org/10.3390/biomimetics10050313