
Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications


Abstract
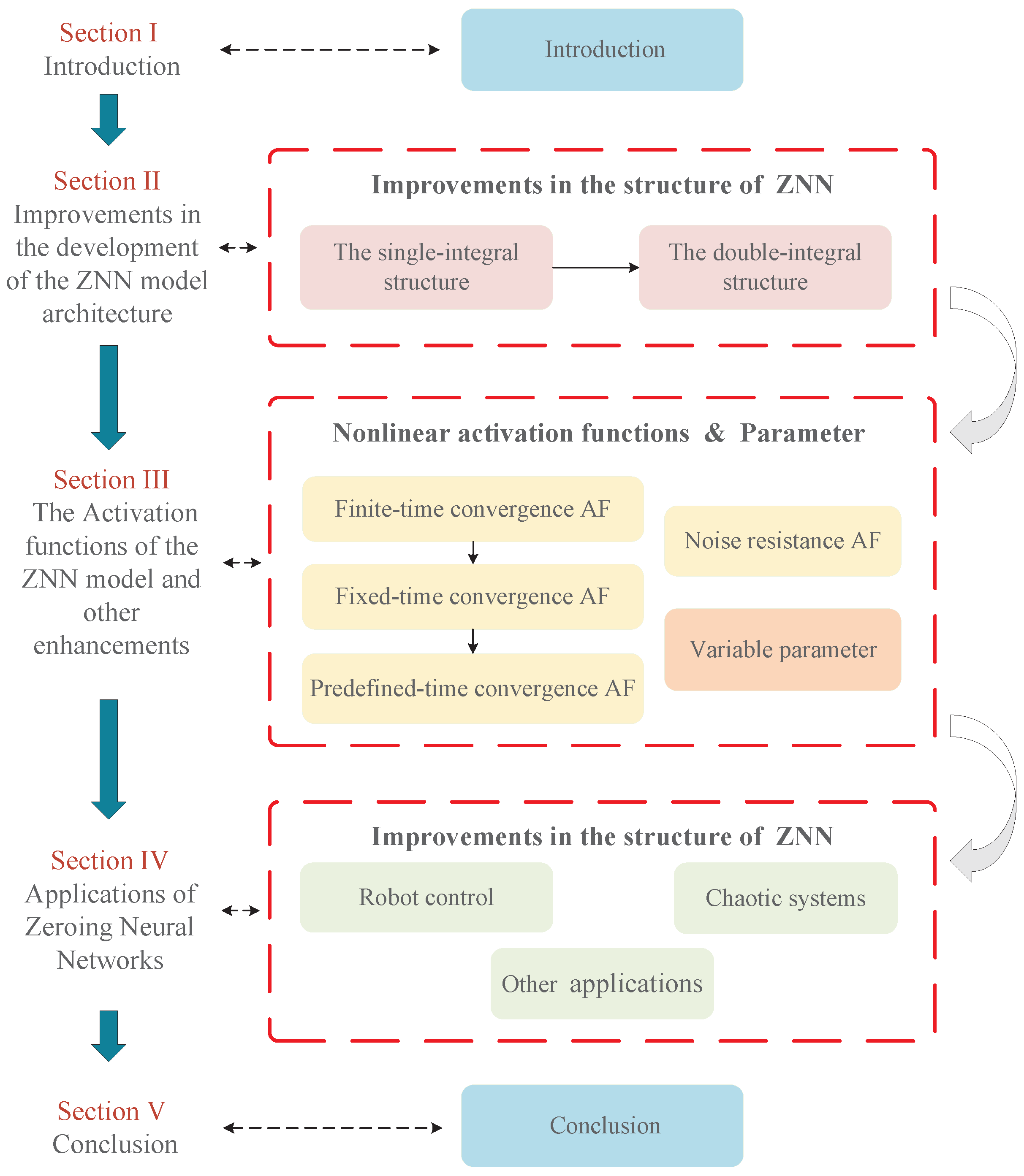
1. Introduction
2. Improvement of Zeroing Neural Network Model Structures
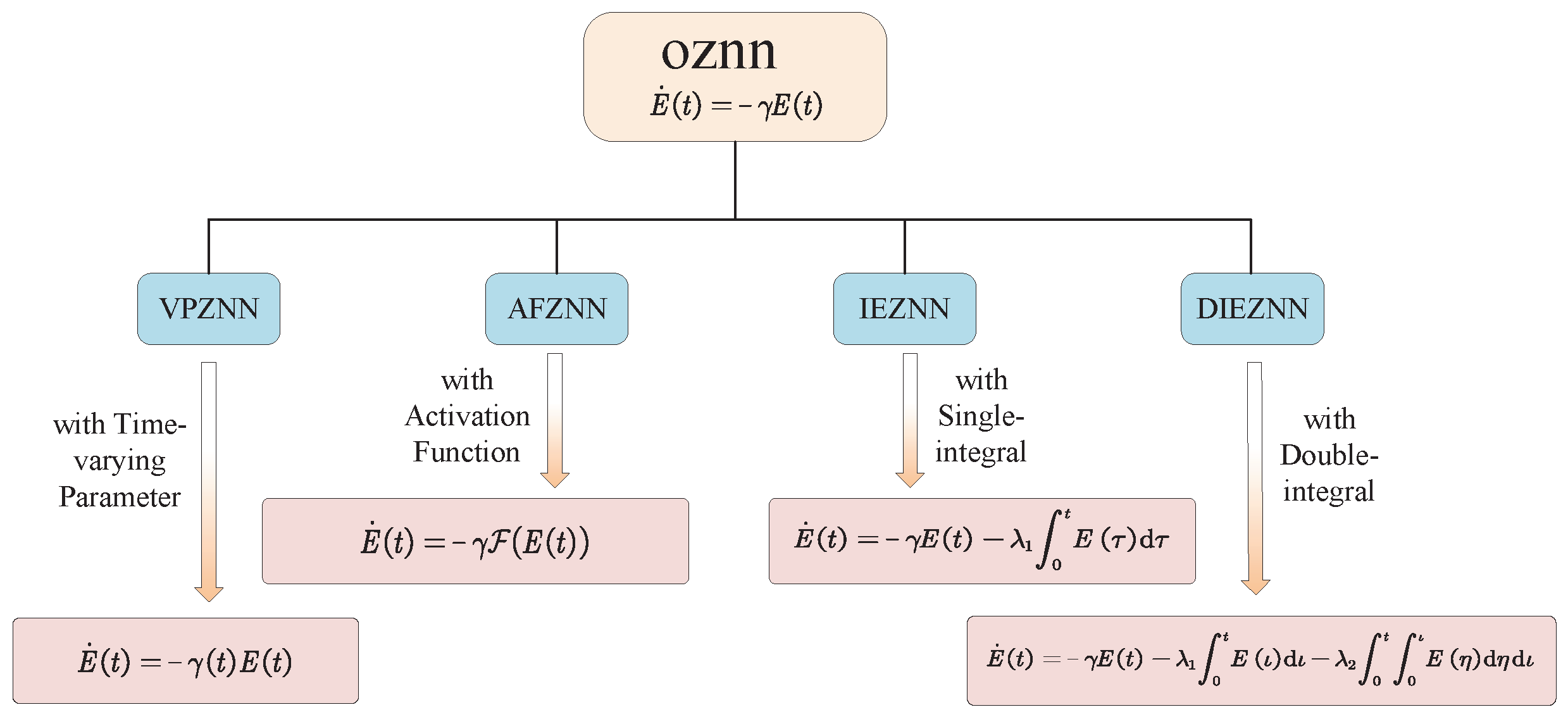
2.1. Original Zeroing Neural Network Model
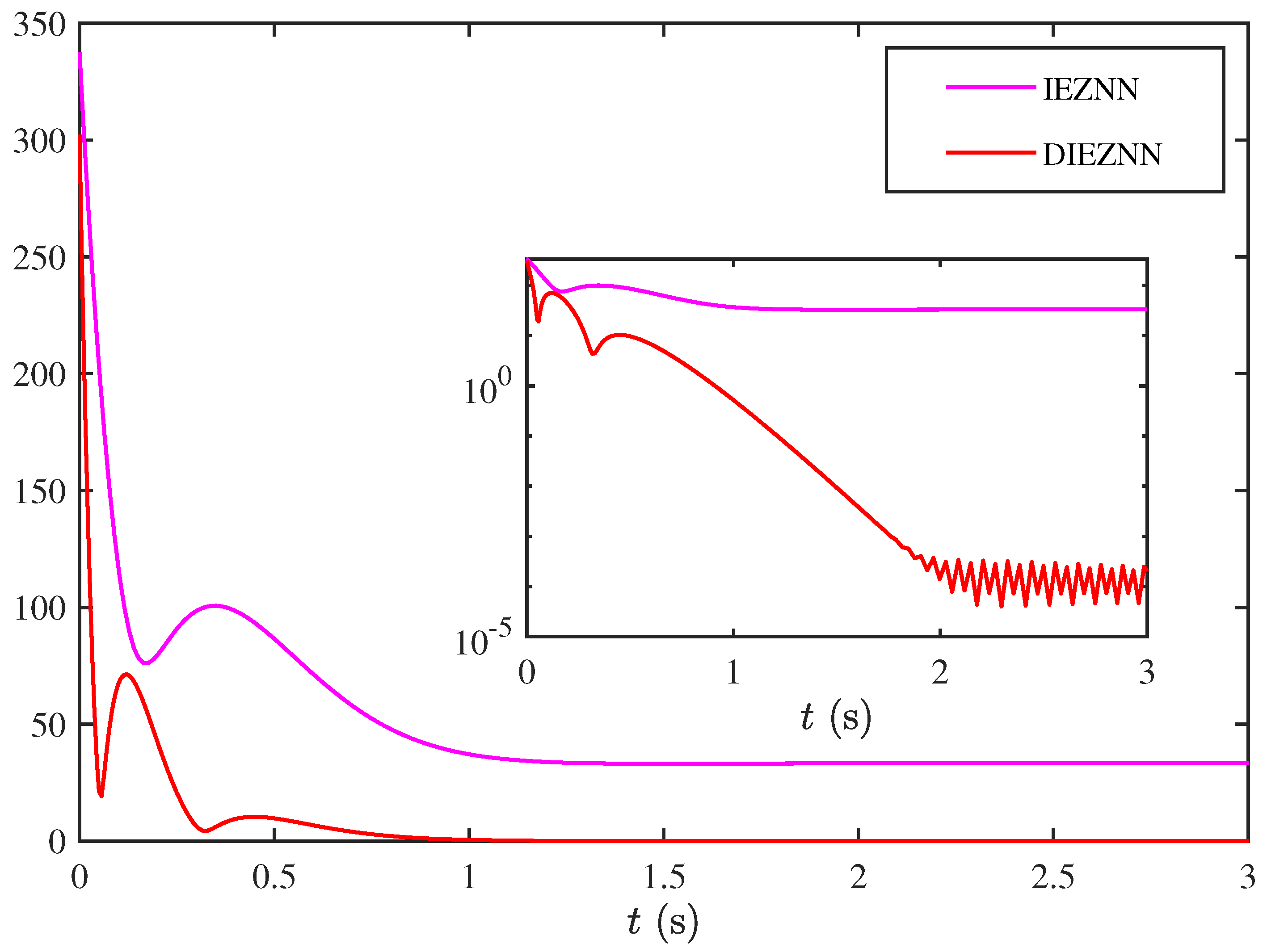
2.2. Integration-Enhanced Zeroing Neural Network
2.3. Design of the Double Integral-Enhanced Zeroing Neural Network Model
3. Activation Functions of Zeroing Neural Network Model and Other Enhancements
3.1. Nonlinear Activation Functions with Enhanced Convergence Properties
3.2. Nonlinear Activation Functions with Noise-Tolerant Capabilities
- Parameter initialization: including the initial state ;
- Time-step iteration: iterating from to with a fixed step size ;
- Model-specific control law and state update: updating the state variable based on the corresponding control law of each ZNN model;
- Introduction and update of auxiliary variables: where denotes the single-integral term and denotes the double-integral term.
3.3. The Variable Parameter Improves the Convergence Performance of Zeroing Neural Network Models
| Algorithm 1: Pseudocode of Discrete Controllers Based on Different ZNN Models |
Parameters initialization: e.g.,
|
4. Applications of Zeroing Neural Networks
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ZNN | zeroing neural network |
| GNN | gradient neural network |
| TVCMI | time-varying complex matrix inversion |
| TVCMP | time-varying complex matrix pseudoinversion |
| TVNE | time-varying nonlinear equation |
| TVOLS | time-varying overdetermined linear system |
| TVSME | time-varying Stein matrix equation |
| TVNM | time-varying nonlinear minimization |
| NNP | nonconvex nonlinear programming |
| MOO | multi-objective optimization |
| TVQO | time-varying quadratic optimization |
| TVP | time-varying problems |
| NT | noise-tolerant |
| RNN | recurrent neural network |
| VEH | harris hawks algorithm |
| ZND | zeroing neural dynamics |
| BZND | bounded zeroing neural dynamics |
| NCZNN | novel complex-valued zeroing neural network |
| NIEZNN | nonlinear activation integral-enhanced zeroing neural network |
| C-AF | coalescent activation function |
| FTNTZNN | fixed-time noise-tolerant zeroing neural network |
| VAF | versatile activation function |
| NRNN | novel recursive neural network |
| TVFPZNN | time-varying fuzzy parameter zeroing neural network |
| VPNTZNN | variable-parameter noise-tolerant zeroing neural network |
| FT-VP-CDNN | finite-time varying-parameter convergent differential neural network |
| VP-CDNN | variable-parameter recurrent neural network |
References
- Zhong, J.; Zhao, H.; Zhao, Q.; Zhou, R.; Zhang, L.; Guo, F.; Wang, J. RGCNPPIS: A Residual Graph Convolutional Network for Protein-Protein Interaction Site Prediction. IEEE/ACM Trans. Comput. Biol. Bioinform. 2024, 21, 1676–1684. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Mai, W.; Zhang, Z. A novel swarm budorcas taxicolor optimization-based multi-support vector method for transformer fault diagnosis. Neural Netw. 2025, 184, 107120. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, J.; Mai, W. VPT: Video portraits transformer for realistic talking face generation. Neural Netw. 2025, 184, 107122. [Google Scholar] [CrossRef]
- Xiang, Z.; Guo, Y. Controlling Melody Structures in Automatic Game Soundtrack Compositions with Adversarial Learning Guided Gaussian Mixture Models. IEEE Trans. Games 2021, 13, 193–204. [Google Scholar] [CrossRef]
- Long, C.; Zhang, G.; Zeng, Z.; Hu, J. Finite-time stabilization of complex-valued neural networks with proportional delays and inertial terms: A non-separation approach. Neural Netw. 2022, 148, 86–95. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, C.; Zhang, M.; Luo, Y.; Mai, J. DCDLN: A densely connected convolutional dynamic learning network for malaria disease diagnosis. Neural Netw. 2024, 176, 106339. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Z.; Xiang, C.; Li, T.; Guo, Y. A self-adapting hierarchical actions and structures joint optimization framework for automatic design of robotic and animation skeletons. Soft Comput. 2021, 25, 263–276. [Google Scholar] [CrossRef]
- Chen, L.; Jin, L.; Shang, M. Efficient Loss Landscape Reshaping for Convolutional Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2024, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Lou, J.; Liao, B.; Peng, C.; Pu, X.; Khan, A.T.; Pham, D.T.; Li, S. Decomposition based neural dynamics for portfolio management with tradeoffs of risks and profits under transaction costs. Neural Netw. 2025, 184, 107090. [Google Scholar] [CrossRef]
- Peng, Y.; Li, M.; Li, Z.; Ma, M.; Wang, M.; He, S. What is the impact of discrete memristor on the performance of neural network: A research on discrete memristor-based BP neural network. Neural Netw. 2025, 185, 107213. [Google Scholar] [CrossRef]
- Liu, Y.; Li, S.; Lin, X.; Chen, X.; Li, G.; Liu, Y.; Liao, B.; Li, J. QoS-Aware Multi-AIGC Service Orchestration at Edges: An Attention-Diffusion-Aided DRL Method. IEEE Trans. Cogn. Commun. Netw. 2025, 11, 1078–1090. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhou, K.; Sarkheyli-Hägele, A.; Yusoff, Y.; Kang, D.; Zain, A.M. Parallel fault diagnosis using hierarchical fuzzy Petri net by reversible and dynamic decomposition mechanism. Front. Inf. Technol. Electron. Eng. 2025, 26, 93–108. [Google Scholar] [CrossRef]
- Zhong, J.; Zhao, H.; Zhao, Q.; Wang, J. A Knowledge Graph-Based Method for Drug-Drug Interaction Prediction with Contrastive Learning. IEEE/ACM Trans. Comput. Biol. Bioinform. 2024, 21, 2485–2495. [Google Scholar] [CrossRef]
- Zhang, Z.; He, Y.; Mai, W.; Luo, Y.; Li, X.; Cheng, Y.; Huang, X.; Lin, R. Convolutional Dynamically Convergent Differential Neural Network for Brain Signal Classification. IEEE Trans. Neural Netw. Learn. Syst. 2024, 1–12. [Google Scholar] [CrossRef]
- Sun, Q.; Wu, X. A deep learning-based approach for emotional analysis of sports dance. PeerJ Comput. Sci. 2023, 9, e1441. [Google Scholar] [CrossRef]
- Sun, L.; Mo, Z.; Yan, F.; Xia, L.; Shan, F.; Ding, Z.; Song, B.; Gao, W.; Shao, W.; Shi, F.; et al. Adaptive Feature Selection Guided Deep Forest for COVID-19 Classification With Chest CT. IEEE J. Biomed. Health Inform. 2020, 24, 2798–2805. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Wu, X. Structural analysis of the evolution mechanism of online public opinion and its development stages based on machine learning and social network analysis. Int. J. Comput. Intell. Syst. 2023, 16, 99. [Google Scholar] [CrossRef]
- Chu, H.M.; Kong, X.Z.; Liu, J.X.; Zheng, C.H.; Zhang, H. A New Binary Biclustering Algorithm Based on Weight Adjacency Difference Matrix for Analyzing Gene Expression Data. IEEE/ACM Trans. Comput. Biol. Bioinform. 2023, 20, 2802–2809. [Google Scholar] [CrossRef]
- Hopfield, J.J.; Tank, D.W. “Neural” computation of decisions in optimization problems. Biol. Cybern. 1985, 52, 141–152. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S.; Pham, D.T.; Cao, X. Beetle antennae search reimagined: Leveraging ChatGPT’s AI to forge new frontiers in optimization algorithms. Cogent Eng. 2024, 11, 2432548. [Google Scholar] [CrossRef]
- Khan, A.T.; Cao, X.; Li, S. Using quadratic interpolated beetle antennae search for higher dimensional portfolio selection under cardinality constraints. Comput. Econ. 2023, 62, 1413–1435. [Google Scholar] [CrossRef]
- Khan, A.T.; Cao, X.; Liao, B.; Francis, A. Bio-inspired Machine Learning for Distributed Confidential Multi-Portfolio Selection Problem. Biomimetics 2022, 7, 124. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.T.; Cao, X.; Brajevic, I.; Stanimirovic, P.S.; Katsikis, V.N.; Li, S. Non-linear Activated Beetle Antennae Search: A novel technique for non-convex tax-aware portfolio optimization problem. Expert Syst. Appl. 2022, 197, 116631. [Google Scholar] [CrossRef]
- Ijaz, M.U.; Khan, A.T.; Li, S. Bio-Inspired BAS: Run-Time Path-Planning and the Control of Differential Mobile Robot. EAI Endorsed Trans. AI Robot. 2022, 1, 1–10. [Google Scholar] [CrossRef]
- Khan, A.T.; Cao, X.; Li, S. Dual Beetle Antennae Search system for optimal planning and robust control of 5-link biped robots. J. Comput. Sci. 2022, 60, 101556. [Google Scholar] [CrossRef]
- Khan, A.T.; Cao, X.; Li, S.; Katsikis, V.N.; Brajevic, I.; Stanimirovic, P.S. Fraud detection in publicly traded U.S firms using Beetle Antennae Search: A machine learning approach. Expert Syst. Appl. 2022, 191, 116148. [Google Scholar] [CrossRef]
- Khan, A.; Cao, X.; Li, Z.; Li, S. Evolutionary computation based real-time robot arm path-planning using beetle antennae search. EAI Endorsed Trans. AI Robot. 2022, 1, e3. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Z.; Hua, C.; Liao, B.; Li, S. Leveraging enhanced egret swarm optimization algorithm and artificial intelligence-driven prompt strategies for portfolio selection. Sci. Rep. 2024, 14, 26681. [Google Scholar] [CrossRef]
- Chen, Z.; Li, S.; Khan, A.T.; Mirjalili, S. Competition of tribes and cooperation of members algorithm: An evolutionary computation approach for model free optimization. Expert Syst. Appl. 2025, 265, 125908. [Google Scholar] [CrossRef]
- Yi, Z.; Cao, X.; Pu, X.; Wu, Y.; Chen, Z.; Khan, A.T.; Francis, A.; Li, S. Fraud detection in capital markets: A novel machine learning approach. Expert Syst. Appl. 2023, 231, 120760. [Google Scholar] [CrossRef]
- Ye, S.; Zhou, K.; Zain, A.M.; Wang, F.; Yusoff, Y. A modified harmony search algorithm and its applications in weighted fuzzy production rule extraction. Front. Inf. Technol. Electron. Eng. 2023, 24, 1574–1590. [Google Scholar] [CrossRef]
- Qin, F.; Zain, A.M.; Zhou, K.Q. Harmony search algorithm and related variants: A systematic review. Swarm Evol. Comput. 2022, 74, 101126. [Google Scholar] [CrossRef]
- Ou, Y.; Qin, F.; Zhou, K.Q.; Yin, P.F.; Mo, L.P.; Mohd Zain, A. An Improved Grey Wolf Optimizer with Multi-Strategies Coverage in Wireless Sensor Networks. Symmetry 2024, 16, 286. [Google Scholar] [CrossRef]
- Liu, J.; Qu, C.; Zhang, L.; Tang, Y.; Li, J.; Feng, H.; Zeng, X.; Peng, X. A new hybrid algorithm for three-stage gene selection based on whale optimization. Sci. Rep. 2023, 13, 3783. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Feng, H.; Tang, Y.; Zhang, L.; Qu, C.; Zeng, X.; Peng, X. A novel hybrid algorithm based on Harris Hawks for tumor feature gene selection. PeerJ Comput. Sci. 2023, 9, e1229. [Google Scholar] [CrossRef]
- Qu, C.; Zhang, L.; Li, J.; Deng, F.; Tang, Y.; Zeng, X.; Peng, X. Improving feature selection performance for classification of gene expression data using Harris Hawks optimizer with variable neighborhood learning. Brief. Bioinform. 2021, 22, bbab097. [Google Scholar] [CrossRef]
- Wu, W.; Tian, Y.; Jin, T. A label based ant colony algorithm for heterogeneous vehicle routing with mixed backhaul. Appl. Soft Comput. 2016, 47, 224–234. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, D.; Wang, J. A recurrent neural network for solving Sylvester equation with time-varying coefficients. IEEE Trans. Neural Netw. 2002, 13, 1053–1063. [Google Scholar] [CrossRef]
- Hua, C.; Cao, X.; Liao, B. Real-Time Solutions for Dynamic Complex Matrix Inversion and Chaotic Control Using ODE-Based Neural Computing Methods. Comput. Intell. 2025, 41, e70042. [Google Scholar] [CrossRef]
- Tamoor Khan, A.; Wang, Y.; Wang, T.; Hua, C. Neural Dynamics for Computing and Automation: A Survey. IEEE Access 2025, 13, 27214–27227. [Google Scholar] [CrossRef]
- Cao, X.; Li, P.; Khan, A.T. A Novel Zeroing Neural Network for the Effective Solution of Supply Chain Inventory Balance Problems. Computation 2025, 13, 32. [Google Scholar] [CrossRef]
- Xiao, L. A new design formula exploited for accelerating Zhang neural network and its application to time-varying matrix inversion. Theor. Comput. Sci. 2016, 647, 50–58. [Google Scholar] [CrossRef]
- Liao, B.; Hua, C.; Xu, Q.; Cao, X.; Li, S. Inter-robot management via neighboring robot sensing and measurement using a zeroing neural dynamics approach. Expert Syst. Appl. 2024, 244, 122938. [Google Scholar] [CrossRef]
- Xiao, L.; Liao, B.; Li, S.; Chen, K. Nonlinear recurrent neural networks for finite-time solution of general time-varying linear matrix equations. Neural Netw. 2018, 98, 102–113. [Google Scholar] [CrossRef] [PubMed]
- Ding, L.; Xiao, L.; Liao, B.; Lu, R.; Peng, H. An Improved Recurrent Neural Network for Complex-Valued Systems of Linear Equation and Its Application to Robotic Motion Tracking. Front. Neurorobot. 2017, 11, 45. [Google Scholar] [CrossRef]
- Xiang, Q.; Gong, H.; Hua, C. A new discrete-time denoising complex neurodynamics applied to dynamic complex generalized inverse matrices. J. Supercomput. 2025, 81, 1–25. [Google Scholar] [CrossRef]
- Liao, B.; Wang, Y.; Li, J.; Guo, D.; He, Y. Harmonic Noise-Tolerant ZNN for Dynamic Matrix Pseudoinversion and Its Application to Robot Manipulator. Front. Neurorobot. 2022, 16, 928636. [Google Scholar] [CrossRef]
- Xiang, Q.; Liao, B.; Xiao, L.; Lin, L.; Li, S. Discrete-time noise-tolerant Zhang neural network for dynamic matrix pseudoinversion. Soft Comput. 2019, 23, 755–766. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, Y. Continuous and discrete gradient-Zhang neuronet (GZN) with analyses for time-variant overdetermined linear equation system solving as well as mobile localization applications. Neurocomputing 2023, 561, 126883. [Google Scholar] [CrossRef]
- Dai, L.; Xu, H.; Zhang, Y.; Liao, B. Norm-based zeroing neural dynamics for time-variant non-linear equations. Caai Trans. Intell. Technol. 2024, 9, 1561–1571. [Google Scholar] [CrossRef]
- Xiao, L.; Lu, R. Finite-time solution to nonlinear equation using recurrent neural dynamics with a specially-constructed activation function. Neurocomputing 2015, 151, 246–251. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Weng, J.; Mao, Y.; Lu, W.; Xiao, L. A New Varying-Parameter Recurrent Neural-Network for Online Solution of Time-Varying Sylvester Equation. IEEE Trans. Cybern. 2018, 48, 3135–3148. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Liao, B. A convergence-accelerated Zhang neural network and its solution application to Lyapunov equation. Neurocomputing 2016, 193, 213–218. [Google Scholar] [CrossRef]
- Xiao, L.; Dai, J.; Lu, R.; Li, S.; Li, J.; Wang, S. Design and Comprehensive Analysis of a Noise-Tolerant ZNN Model With Limited-Time Convergence for Time-Dependent Nonlinear Minimization. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5339–5348. [Google Scholar] [CrossRef]
- Luo, Y.; Li, X.; Li, Z.; Xie, J.; Zhang, Z.; Li, X. A Novel Swarm-Exploring Neurodynamic Network for Obtaining Global Optimal Solutions to Nonconvex Nonlinear Programming Problems. IEEE Trans. Cybern. 2024, 54, 5866–5876. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Li, L.; Deng, X.; Xiao, L.; Huang, G. A new finite-time varying-parameter convergent-differential neural-network for solving nonlinear and nonconvex optimization problems. Neurocomputing 2018, 319, 74–83. [Google Scholar] [CrossRef]
- Wei, L.; Jin, L. Collaborative Neural Solution for Time-Varying Nonconvex Optimization With Noise Rejection. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 2935–2948. [Google Scholar] [CrossRef]
- Zhang, Z.; Sun, X.; Li, X.; Liu, Y. An adaptive variable-parameter dynamic learning network for solving constrained time-varying QP problem. Neural Netw. 2025, 184, 106968. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, H.; Ren, X.; Luo, Y. A swarm exploring neural dynamics method for solving convex multi-objective optimization problem. Neurocomputing 2024, 601, 128203. [Google Scholar] [CrossRef]
- Xiao, L.; Li, K.; Duan, M. Computing Time-Varying Quadratic Optimization with Finite-Time Convergence and Noise Tolerance: A Unified Framework for Zeroing Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3360–3369. [Google Scholar] [CrossRef]
- Jin, L.; Liao, B.; Liu, M.; Xiao, L.; Guo, D.; Yan, X. Different-Level Simultaneous Minimization Scheme for Fault Tolerance of Redundant Manipulator Aided with Discrete-Time Recurrent Neural Network. Front. Neurorobot. 2017, 11, 50. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Y.; Jin, L. Taylor O(h3) Discretization of ZNN Models for Dynamic Equality-Constrained Quadratic Programming With Application to Manipulators. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 225–237. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L. A nonlinearly-activated neurodynamic model and its finite-time solution to equality-constrained quadratic optimization with nonstationary coefficients. Appl. Soft Comput. 2016, 40, 252–259. [Google Scholar] [CrossRef]
- Liu, M.; Jiang, Q.; Li, H.; Cao, X.; Lv, X. Finite-time-convergent support vector neural dynamics for classification. Neurocomputing 2025, 617, 128810. [Google Scholar] [CrossRef]
- Liu, M.; Liao, B.; Ding, L.; Xiao, L. Performance analyses of recurrent neural network models exploited for online time-varying nonlinear optimization. Comput. Sci. Inf. Syst. 2016, 13, 691–705. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, M.; Ren, X. Double center swarm exploring varying parameter neurodynamic network for non-convex nonlinear programming. Neurocomputing 2025, 619, 129156. [Google Scholar] [CrossRef]
- Lv, X.; Xiao, L.; Tan, Z.; Yang, Z. Wsbp function activated Zhang dynamic with finite-time convergence applied to Lyapunov equation. Neurocomputing 2018, 314, 310–315. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Y. From different ZFs to different ZNN models accelerated via Li activation functions to finite-time convergence for time-varying matrix pseudoinversion. Neurocomputing 2014, 133, 512–522. [Google Scholar] [CrossRef]
- Dai, J.; Yang, X.; Xiao, L.; Jia, L.; Li, Y. ZNN with Fuzzy Adaptive Activation Functions and Its Application to Time-Varying Linear Matrix Equation. IEEE Trans. Ind. Inform. 2022, 18, 2560–2570. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Li, Z.; Guo, D.S.; Chen, K.; Chen, P. Superior robustness of using power-sigmoid activation functions in Z-type models for time-varying problems solving. In Proceedings of the 2013 International Conference on Machine Learning and Cybernetics, Tianjin, China, 14–17 July 2013; Volume 2, pp. 759–764. [Google Scholar] [CrossRef]
- Jin, J.; Zhu, J.; Gong, J.; Chen, W. Novel activation functions-based ZNN models for fixed-time solving dynamirc Sylvester equation. Neural Comput. Appl. 2022, 34, 14297–14315. [Google Scholar] [CrossRef]
- Li, S.; Chen, S.; Liu, B. Accelerating a recurrent neural network to finite-time convergence for solving time-varying Sylvester equation by using a sign-bi-power activation function. Neural Process. Lett. 2013, 37, 189–205. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, L.; Ke, Z. Superior performance of using hyperbolic sine activation functions in ZNN illustrated via time-varying matrix square roots finding. Comput. Sci. Inf. Syst. 2012, 9, 1603–1625. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y. Superior robustness of power-sum activation functions in Zhang neural networks for time-varying quadratic programs perturbed with large implementation errors. Neural Comput. Appl. 2013, 22, 175–185. [Google Scholar] [CrossRef]
- Li, H.; Liao, B.; Li, J.; Li, S. A Survey on Biomimetic and Intelligent Algorithms with Applications. Biomimetics 2024, 9, 453. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Z.; Liao, B.; Hua, C. An improving integration-enhanced ZNN for solving time-varying polytope distance problems with inequality constraint. Neural Comput. Appl. 2024, 36, 18237–18250. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Z.; Huang, Y.; Liao, B.; Li, S. Applications of Zeroing Neural Networks: A Survey. IEEE Access 2024, 12, 51346–51363. [Google Scholar] [CrossRef]
- Hua, C.; Cao, X.; Liao, B.; Li, S. Advances on intelligent algorithms for scientific computing: An overview. Front. Neurorobot. 2023, 17, 1190977. [Google Scholar] [CrossRef] [PubMed]
- Jin, L.; Li, S.; Liao, B.; Zhang, Z. Zeroing neural networks: A survey. Neurocomputing 2017, 267, 597–604. [Google Scholar] [CrossRef]
- Jin, J.; Wu, M.; Ouyang, A.; Li, K.; Chen, C. A Novel Dynamic Hill Cipher and Its Applications on Medical IoT. IEEE Internet Things J. 2025, 1. [Google Scholar] [CrossRef]
- Xiao, L.; Li, L.; Tao, J.; Li, W. A predefined-time and anti-noise varying-parameter ZNN model for solving time-varying complex Stein equations. Neurocomputing 2023, 526, 158–168. [Google Scholar] [CrossRef]
- Yan, J.; Jin, L.; Hu, B. Data-Driven Model Predictive Control for Redundant Manipulators With Unknown Model. IEEE Trans. Cybern. 2024, 54, 5901–5911. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, Z.; Li, X. Neural Dynamic Fault-Tolerant Scheme for Collaborative Motion Planning of Dual-Redundant Robot Manipulators. IEEE Trans. Neural Netw. Learn. Syst. 2024, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Zhang, B. A Two-Phase Algorithm for Reliable and Energy-Efficient Heterogeneous Embedded Systems. IEICE Trans. Inf. Syst. 2024, 107, 1285–1296. [Google Scholar] [CrossRef]
- Jin, L.; Huang, R.; Liu, M.; Ma, X. Cerebellum-Inspired Learning and Control Scheme for Redundant Manipulators at Joint Velocity Level. IEEE Trans. Cybern. 2024, 54, 6297–6306. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Zhang, Y.; Dai, J.; Chen, K.; Yang, S.; Li, W.; Liao, B.; Ding, L.; Li, J. A new noise-tolerant and predefined-time ZNN model for time-dependent matrix inversion. Neural Netw. 2019, 117, 124–134. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Kadry, S.; Liao, B. Recurrent Neural Network for Kinematic Control of Redundant Manipulators With Periodic Input Disturbance and Physical Constraints. IEEE Trans. Cybern. 2019, 49, 4194–4205. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Liao, B.; Zhang, Z.; Ding, L.; Jin, L. A Velocity-Level Bi-Criteria Optimization Scheme for Coordinated Path Tracking of Dual Robot Manipulators Using Recurrent Neural Network. Front. Neurorobot. 2017, 11, 47. [Google Scholar] [CrossRef]
- Li, X.; Ren, X.; Zhang, Z.; Guo, J.; Luo, Y.; Mai, J.; Liao, B. A varying-parameter complementary neural network for multi-robot tracking and formation via model predictive control. Neurocomputing 2024, 609, 128384. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Weng, J.; Liao, B. GNN Model for Time-Varying Matrix Inversion With Robust Finite-Time Convergence. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 559–569. [Google Scholar] [CrossRef]
- Xiao, L.; Li, K.; Tan, Z.; Zhang, Z.; Liao, B.; Chen, K.; Jin, L.; Li, S. Nonlinear gradient neural network for solving system of linear equations. Inf. Process. Lett. 2019, 142, 35–40. [Google Scholar] [CrossRef]
- Xiao, L. A finite-time convergent neural dynamics for online solution of time-varying linear complex matrix equation. Neurocomputing 2015, 167, 254–259. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, Y.; Li, S. Integration-Enhanced Zhang Neural Network for Real-Time-Varying Matrix Inversion in the Presence of Various Kinds of Noises. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2615–2627. [Google Scholar] [CrossRef]
- Liao, B.; Xiang, Q.; Li, S. Bounded Z-type neurodynamics with limited-time convergence and noise tolerance for calculating time-dependent Lyapunov equation. Neurocomputing 2019, 325, 234–241. [Google Scholar] [CrossRef]
- Lei, Y.; Luo, J.; Chen, T.; Ding, L.; Liao, B.; Xia, G.; Dai, Z. Nonlinearly Activated IEZNN Model for Solving Time-Varying Sylvester Equation. IEEE Access 2022, 10, 121520–121530. [Google Scholar] [CrossRef]
- Xiao, L.; He, Y.; Wang, Y.; Dai, J.; Wang, R.; Tang, W. A Segmented Variable-Parameter ZNN for Dynamic Quadratic Minimization with Improved Convergence and Robustness. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 2413–2424. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Li, S.; Yang, J.; Zhang, Z. A new recurrent neural network with noise-tolerance and finite-time convergence for dynamic quadratic minimization. Neurocomputing 2018, 285, 125–132. [Google Scholar] [CrossRef]
- Liao, B.; Hua, C.; Cao, X.; Katsikis, V.N.; Li, S. Complex Noise-Resistant Zeroing Neural Network for Computing Complex Time-Dependent Lyapunov Equation. Mathematics 2022, 10, 2817. [Google Scholar] [CrossRef]
- Liao, B.; Han, L.; Cao, X.; Li, S.; Li, J. Double integral-enhanced Zeroing neural network with linear noise rejection for time-varying matrix inverse. Caai Trans. Intell. Technol. 2024, 9, 197–210. [Google Scholar] [CrossRef]
- Li, J.; Qu, L.; Zhu, Y.; Li, Z.; Liao, B. A Novel Zeroing Neural Network for Time-varying Matrix Pseudoinversion in the Presence of Linear Noises. Tsinghua Sci. Technol. 2024. [Google Scholar] [CrossRef]
- Xiao, L.; Tan, H.; Jia, L.; Dai, J.; Zhang, Y. New error function designs for finite-time ZNN models with application to dynamic matrix inversion. Neurocomputing 2020, 402, 395–408. [Google Scholar] [CrossRef]
- Xiao, L.; Yi, Q.; Dai, J.; Li, K.; Hu, Z. Design and analysis of new complex zeroing neural network for a set of dynamic complex linear equations. Neurocomputing 2019, 363, 171–181. [Google Scholar] [CrossRef]
- Xiao, L.; Cao, P.; Song, W.; Luo, L.; Tang, W. A Fixed-Time Noise-Tolerance ZNN Model for Time-Variant Inequality-Constrained Quaternion Matrix Least-Squares Problem. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 10503–10512. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Liao, B.; Xiao, L.; Lu, R. A recurrent neural network with predefined-time convergence and improved noise tolerance for dynamic matrix square root finding. Neurocomputing 2019, 337, 262–273. [Google Scholar] [CrossRef]
- Li, W.; Guo, C.; Ma, X.; Pan, Y. A Strictly Predefined-Time Convergent and Noise-Tolerant Neural Model for Solving Linear Equations With Robotic Applications. IEEE Trans. Ind. Electron. 2024, 71, 798–809. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Z.; Zhang, Z.; Li, W.; Li, S. Design, verification and robotic application of a novel recurrent neural network for computing dynamic Sylvester equation. Neural Netw. 2018, 105, 185–196. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Ge, S. Design and analysis of a general recurrent neural network model for time-varying matrix inversion. IEEE Trans. Neural Netw. 2005, 16, 1477–1490. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C.; Guo, D.; Zheng, J. Comparison on Zhang neural dynamics and gradient-based neural dynamics for online solution of nonlinear time-varying equation. Neural Comput. Appl. 2011, 20, 1–7. [Google Scholar] [CrossRef]
- Li, S.; Li, Y. Nonlinearly Activated Neural Network for Solving Time-Varying Complex Sylvester Equation. IEEE Trans. Cybern. 2014, 44, 1397–1407. [Google Scholar] [CrossRef]
- Sun, M.; Zhang, Y.; Wang, L.; Wu, Y.; Zhong, G. Time-variant quadratic programming solving by using finitely-activated RNN models with exact settling time. Neural Comput. Appl. 2025, 37, 6067–6084. [Google Scholar] [CrossRef]
- Zhang, Y.; Liao, B.; Geng, G. GNN Model With Robust Finite-Time Convergence for Time-Varying Systems of Linear Equations. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 4786–4797. [Google Scholar] [CrossRef]
- Jin, J.; Zhu, J.; Zhao, L.; Chen, L. A fixed-time convergent and noise-tolerant zeroing neural network for online solution of time-varying matrix inversion. Appl. Soft Comput. 2022, 130, 109691. [Google Scholar] [CrossRef]
- Sun, Z.; Tang, S.; Zhang, J.; Yu, J. Nonconvex Noise-Tolerant Neural Model for Repetitive Motion of Omnidirectional Mobile Manipulators. IEEE/CAA J. Autom. Sin. 2023, 10, 1766–1768. [Google Scholar] [CrossRef]
- Cao, M.; Xiao, L.; Zuo, Q.; Tan, P.; He, Y.; Gao, X. A Fixed-Time Robust ZNN Model with Adaptive Parameters for Redundancy Resolution of Manipulators. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 3886–3898. [Google Scholar] [CrossRef]
- Xiao, L.; Luo, J.; Li, J.; Jia, L.; Li, J. Fixed-Time Consensus for Multiagent Systems Under Switching Topology: A Distributed Zeroing Neural Network-Based Method. IEEE Syst. Man, Cybern. Mag. 2024, 10, 44–55. [Google Scholar] [CrossRef]
- Luo, J.; Xiao, L.; Cao, P.; Li, X. A new class of robust and predefined-time consensus protocol based on noise-tolerant ZNN models. Appl. Soft Comput. 2023, 145, 110550. [Google Scholar] [CrossRef]
- Jia, L.; Xiao, L.; Dai, J.; Wang, Y. Intensive Noise-Tolerant Zeroing Neural Network Based on a Novel Fuzzy Control Approach. IEEE Trans. Fuzzy Syst. 2023, 31, 4350–4360. [Google Scholar] [CrossRef]
- Li, S.; Ma, C. A novel predefined-time noise-tolerant zeroing neural network for solving time-varying generalized linear matrix equations. J. Frankl. Inst. 2023, 360, 11788–11808. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, L.; Jin, J. A noise-tolerant fuzzy-type zeroing neural network for robust synchronization of chaotic systems. Concurr. Comput. Pract. Exp. 2024, 36, e8218. [Google Scholar] [CrossRef]
- Xiao, L.; He, Y.; Dai, J.; Liu, X.; Liao, B.; Tan, H. A Variable-Parameter Noise-Tolerant Zeroing Neural Network for Time-Variant Matrix Inversion With Guaranteed Robustness. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 1535–1545. [Google Scholar] [CrossRef]
- Zhang, Z.; Fu, T.; Yan, Z.; Jin, L.; Xiao, L.; Sun, Y.; Yu, Z.; Li, Y. A Varying-Parameter Convergent-Differential Neural Network for Solving Joint-Angular-Drift Problems of Redundant Robot Manipulators. IEEE/ASME Trans. Mechatron. 2018, 23, 679–689. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Wang, M. An exponential-enhanced-type varying-parameter RNN for solving time-varying matrix inversion. Neurocomputing 2019, 338, 126–138. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L. A Complex Varying-Parameter Convergent-Differential Neural-Network for Solving Online Time-Varying Complex Sylvester Equation. IEEE Trans. Cybern. 2019, 49, 3627–3639. [Google Scholar] [CrossRef] [PubMed]
- Tan, Z.; Li, W.; Xiao, L.; Hu, Y. New Varying-Parameter ZNN Models With Finite-Time Convergence and Noise Suppression for Time-Varying Matrix Moore–Penrose Inversion. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2980–2992. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Dai, J.; Zuo, Q.; Wang, S. Comprehensive Analysis of a New Varying Parameter Zeroing Neural Network for Time Varying Matrix Inversion. IEEE Trans. Ind. Inform. 2021, 17, 1604–1613. [Google Scholar] [CrossRef]
- Xiao, L.; He, Y. A Noise-Suppression ZNN Model with New Variable Parameter for Dynamic Sylvester Equation. IEEE Trans. Ind. Inform. 2021, 17, 7513–7522. [Google Scholar] [CrossRef]
- Xiao, L.; Huang, W.; Li, X.; Sun, F.; Liao, Q.; Jia, L.; Li, J.; Liu, S. ZNNs With a Varying-Parameter Design Formula for Dynamic Sylvester Quaternion Matrix Equation. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 9981–9991. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Huang, W.; Jia, L.; Gao, X. A Dynamic Parameter Noise-Tolerant Zeroing Neural Network for Time-Varying Quaternion Matrix Equation With Applications. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 8205–8214. [Google Scholar] [CrossRef]
- Xiao, L.; Li, X.; Cao, P.; He, Y.; Tang, W.; Li, J.; Wang, Y. A Dynamic-Varying Parameter Enhanced ZNN Model for Solving Time-Varying Complex-Valued Tensor Inversion With Its Application to Image Encryption. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 13681–13690. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y. Solving time-varying inverse kinematics problem of wheeled mobile manipulators using Zhang neural network with exponential convergence. Nonlinear Dynamics. 2014, 76, 1543–1559. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, Y.; Ming, L. Novel Snap-Layer MMPC Scheme via Neural Dynamics Equivalency and Solver for Redundant Robot Arms With Five-Layer Physical Limits. IEEE Trans. Neural Netw. Learn. Syst. 2024, 36, 3534–3546. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S. Smart surgical control under RCM constraint using bio-inspired network. Neurocomputing 2022, 470, 121–129. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S.; Cao, X. Human guided cooperative robotic agents in smart home using beetle antennae search. Sci. China Inf. Sci. 2022, 65, 122204. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Chen, Y.; Qi, Y.; Jin, L. A Distributed Competitive and Collaborative Coordination for Multirobot Systems. IEEE Trans. Mob. Comput. 2024, 23, 11436–11448. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S.; Li, Z. Obstacle avoidance and model-free tracking control for home automation using bio-inspired approach. Adv. Control Appl. 2022, 4, e63. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, Y. Refined Self-Motion Scheme With Zero Initial Velocities and Time-Varying Physical Limits via Zhang Neurodynamics Equivalency. Front. Neurorobot. 2022, 16, 945346. [Google Scholar] [CrossRef]
- Li, W.; Xiao, L.; Liao, B. A Finite-Time Convergent and Noise-Rejection Recurrent Neural Network and Its Discretization for Dynamic Nonlinear Equations Solving. IEEE Trans. Cybern. 2020, 50, 3195–3207. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Yuan, Y.; Peng, S.; Li, G.; Yin, P. Joint computation offloading and resource allocation for end-edge collaboration in internet of vehicles via multi-agent reinforcement learning. Neural Netw. 2024, 179, 106621. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Tuna, M.; Fidan, C.B. Electronic circuit design, implementation and FPGA-based realization of a new 3D chaotic system with single equilibrium point. Optik 2016, 127, 11786–11799. [Google Scholar] [CrossRef]
- Yu, H.; Cai, G.; Li, Y. Dynamic analysis and control of a new hyperchaotic finance system. Nonlinear Dyn. 2012, 67, 2171–2182. [Google Scholar] [CrossRef]
- Brindley, J.; Kapitaniak, T.; Kocarev, L. Controlling chaos by chaos in geophysical systems. Geophys. Res. Lett. 1995, 22, 1257–1260. [Google Scholar] [CrossRef]
- Naderi, B.; Kheiri, H. Exponential synchronization of chaotic system and application in secure communication. Optik 2016, 127, 2407–2412. [Google Scholar] [CrossRef]
- Aoun, S.B.; Derbel, N.; Jerbi, H.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. A quaternion Sylvester equation solver through noise-resilient Zeroing neural networks with application to control the SFM chaotic system. AIMS Math. 2023, 8, 27376–27395. [Google Scholar] [CrossRef]
- Xiao, L.; Li, L.; Cao, P.; He, Y. A fixed-time robust controller based on Zeroing neural network for generalized projective synchronization of chaotic systems. Chaos Solitons Fractals 2023, 169, 113279. [Google Scholar] [CrossRef]
- Jin, J.; Chen, W.; Ouyang, A.; Yu, F.; Liu, H. A Time-Varying Fuzzy Parameter Zeroing Neural Network for the Synchronization of Chaotic Systems. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 364–376. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Jia, L.; Xiao, L.; Dai, J.; Cao, Y. A Novel Fuzzy-Power Zeroing Neural Network Model for Time-Variant Matrix Moore–Penrose Inversion With Guaranteed Performance. IEEE Trans. Fuzzy Syst. 2021, 29, 2603–2611. [Google Scholar] [CrossRef]
- Yu, F.; Zhang, Z.; Shen, H.; Huang, Y.; Cai, S.; Du, S. FPGA implementation and image encryption application of a new PRNG based on a memristive Hopfield neural network with a special activation gradient. Chin. Phys. B 2022, 31, 020505. [Google Scholar] [CrossRef]
- Charif, F.; Benchabane, A.; Djedi, N.; Taleb-Ahmed, A. Horn & Schunck meets a discrete Zhang neural networks for computing 2D optical flow. In Proceedings of the International Conference on Electronics & Oil: From Theory to Applications, Ouargla, Algeria, 5–6 March 2013. [Google Scholar]
- Zlateski, A.; Lee, K.; Seung, H.S. ZNN–A Fast and Scalable Algorithm for Training 3D Convolutional Networks on Multi-core and Many-Core Shared Memory Machines. In Proceedings of the 2016 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Chicago, IL, USA, 23–27 May 2016; pp. 801–811. [Google Scholar]
- Benchabane, A.; Bennia, A.; Charif, F.; Taleb-Ahmed, A. Multi-dimensional Capon spectral estimation using discrete Zhang neural networks. Multidimens. Syst. Signal Process. 2013, 24, 583–598. [Google Scholar] [CrossRef]
- Zhang, Y.; Yan, X.; Liao, B.; Zhang, Y.; Ding, Y. Z-type control of populations for Lotka–Volterra model with exponential convergence. Math. Biosci. 2016, 272, 15–23. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiu, B.; Liao, B.; Yang, Z. Control of pendulum tracking (including swinging up) of IPC system using zeroing-gradient method. Nonlinear Dyn. 2017, 89, 1–25. [Google Scholar] [CrossRef]
- Guo, J.; Qiu, B.; Yang, M.; Zhang, Y. Zhang Neural Network Model for Solving LQ Decomposition Problem of Dynamic Matrix With Application to Mobile Object Localization. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, L.; He, Y.; Li, Y.; Dai, J. Design and Analysis of Two Nonlinear ZNN Models for Matrix LR and QR Factorization with Application to 3-D Moving Target Location. IEEE Trans. Ind. Inform. 2023, 19, 7424–7434. [Google Scholar] [CrossRef]
- He, Y.; Xiao, L.; Sun, F.; Wang, Y. A variable-parameter ZNN with predefined-time convergence for dynamic complex-valued Lyapunov equation and its application to AOA positioning. Appl. Soft Comput. 2022, 130, 109703. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, Y.; Wei, L.; Liu, K.; Jin, L.; Ren, L. Two DTZNN Models of O(τ4) Pattern for Online Solving Dynamic System of Linear Equations: Application to Manipulator Motion Generation. IEEE Access 2020, 8, 36624–36638. [Google Scholar] [CrossRef]
- Xiao, L.; Liao, B.; Li, S.; Zhang, Z.; Ding, L.; Jin, L. Design and Analysis of FTZNN Applied to the Real-Time Solution of a Nonstationary Lyapunov Equation and Tracking Control of a Wheeled Mobile Manipulator. IEEE Trans. Ind. Inform. 2018, 14, 98–105. [Google Scholar] [CrossRef]
- Jin, J.; Gong, J. An interference-tolerant fast convergence Zeroing neural network for dynamic matrix inversion and its application to mobile manipulator path tracking. Alex. Eng. J. 2021, 60, 659–669. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y. Robust Zeroing Neural-Dynamics and Its Time-Varying Disturbances Suppression Model Applied to Mobile Robot Manipulators. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4385–4397. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, F.; Liu, M.; Xu, S.S.D. Finite-Time Model Predictive Tracking Control of Position and Orientation for Redundant Manipulators. IEEE Trans. Ind. Electron. 2023, 70, 6017–6026. [Google Scholar] [CrossRef]
- Chen, D.; Li, S.; Wu, Q. A Novel Supertwisting Zeroing Neural Network With Application to Mobile Robot Manipulators. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 1776–1787. [Google Scholar] [CrossRef]
- Yang, M.; Zhang, Y.; Tan, N.; Hu, H. Concise Discrete ZNN Controllers for End-Effector Tracking and Obstacle Avoidance of Redundant Manipulators. IEEE Trans. Ind. Inform. 2022, 18, 3193–3202. [Google Scholar] [CrossRef]
- Jin, L.; Zhao, J.; Chen, L.; Li, S. Collective Neural Dynamics for Sparse Motion Planning of Redundant Manipulators Without Hessian Matrix Inversion. IEEE Trans. Neural Netw. Learn. Syst. 2025, 36, 4326–4335. [Google Scholar] [CrossRef] [PubMed]
- Qiu, B.; Guo, J.; Mao, M.; Tan, N. A Fuzzy-Enhanced Robust DZNN Model for Future Multiconstrained Nonlinear Optimization With Robotic Manipulator Control. IEEE Trans. Fuzzy Syst. 2024, 32, 160–173. [Google Scholar] [CrossRef]
- Liao, B.; Wang, T.; Cao, X.; Hua, C.; Li, S. A Novel Zeroing Neural Dynamics for Real-Time Management of Multi-vehicle Cooperation. IEEE Trans. Intell. Veh. 2024, 1–16. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activation Function | Parameter | Convergence |
|---|---|---|
| Finite-time [109] | ||
| Finite-time [110] | ||
| Finite-time [111] | ||
| Finite-time [75] | ||
| Fixed-time [112,113] | ||
| Fixed-time [80] | ||
| Fixed-time [114] | ||
| Fixed-time [115] | ||
| Predefined-time [105] | ||
| Predefined-time [116] | ||
| Predefined-time [86,117] | ||
| Predefined-time [118] | ||
| Predefined-time [119] |
| Variable Parameter | Parameter | Year | Literature |
|---|---|---|---|
| 2018 | [121] | ||
| 2019 | [122] | ||
| 2019 | [123] | ||
| 2020 | [124] | ||
| 2021 | [125] | ||
| 2021 | [126] | ||
| 2022 | [120] | ||
| 2023 | [96] | ||
| 2023 | [127] | ||
| 2024 | [128] | ||
| 2024 | [129] |
| Model | Application Scenarios | Position Error | Integral Structure | Reference |
|---|---|---|---|---|
| HADTZTM | Manipulator motion planning | No | [158] | |
| FTZNN | Manipulator motion planning | No | [159] | |
| ITFCZNN | Manipulator motion planning | No | [160] | |
| RZND | Manipulator motion planning | Single | [161] | |
| FTCND | Manipulator motion planning | No | [162] | |
| STZNN | Manipulator motion planning | Single | [163] | |
| VP-CDNN | Manipulator motion planning | No | [121] | |
| DZNN | Manipulator motion planning | No | [164] | |
| CNDSM | Manipulator motion planning | Single | [165] | |
| FER-DZNN | Manipulator motion planning | Single | [166] | |
| CZND | multi-agent system control | No | [43] | |
| AP-FTZND | multi-agent system control | No | [167] | |
| TVFP-ZNN | Chaotic system | No | [146] | |
| NZNN | Chaotic system | Single | [144] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Hua, C.; Khan, A.H. Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications. Biomimetics 2025, 10, 279. https://doi.org/10.3390/biomimetics10050279
Wang Y, Hua C, Khan AH. Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications. Biomimetics. 2025; 10(5):279. https://doi.org/10.3390/biomimetics10050279
Chicago/Turabian StyleWang, Yufei, Cheng Hua, and Ameer Hamza Khan. 2025. "Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications" Biomimetics 10, no. 5: 279. https://doi.org/10.3390/biomimetics10050279
APA StyleWang, Y., Hua, C., & Khan, A. H. (2025). Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications. Biomimetics, 10(5), 279. https://doi.org/10.3390/biomimetics10050279