

Bio-Inspired Sutures: Localizing Damage by Isolating Strain Energy



Abstract
1. Introduction
1.1. Literature Review
1.2. Purpose of the Study
2. Methods
3. Results
3.1. Φ = 60° Archways
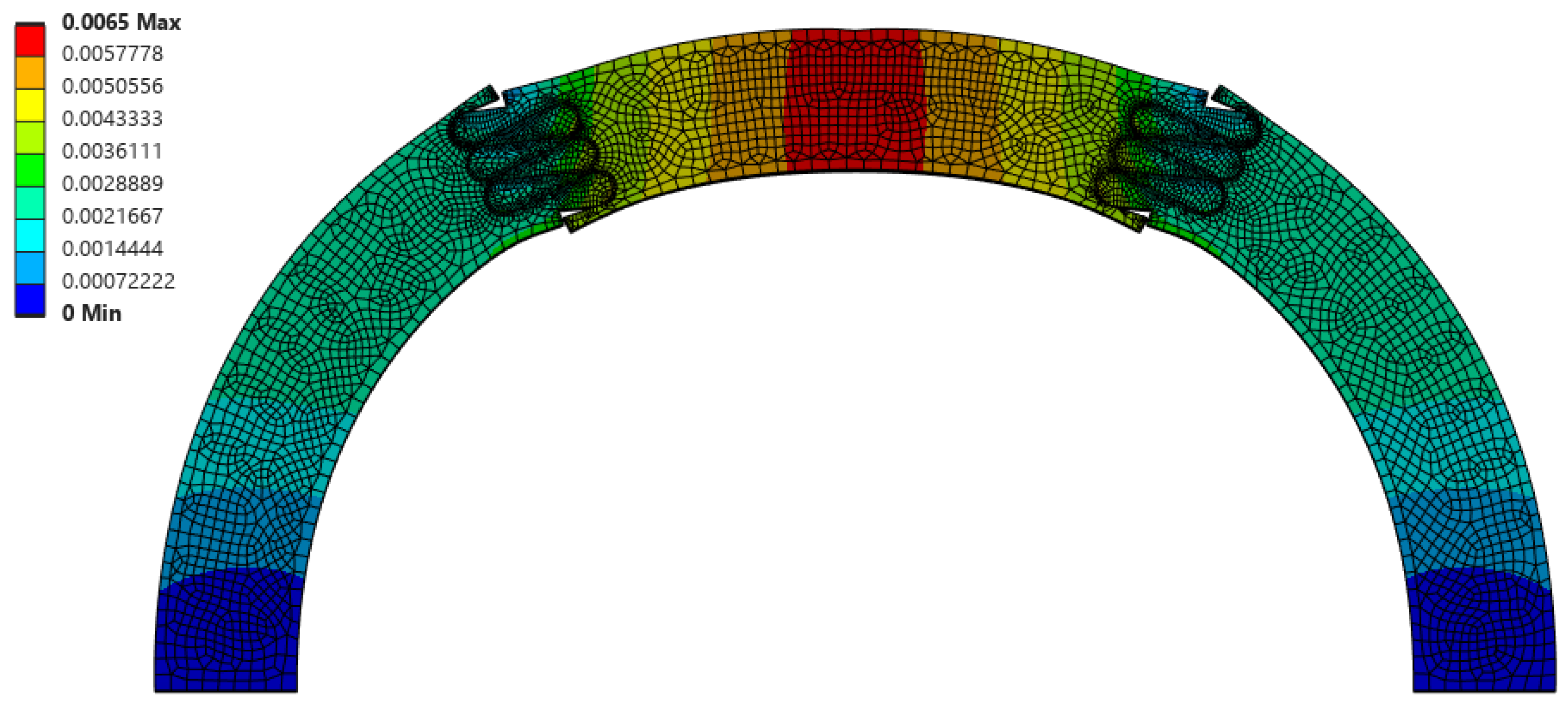
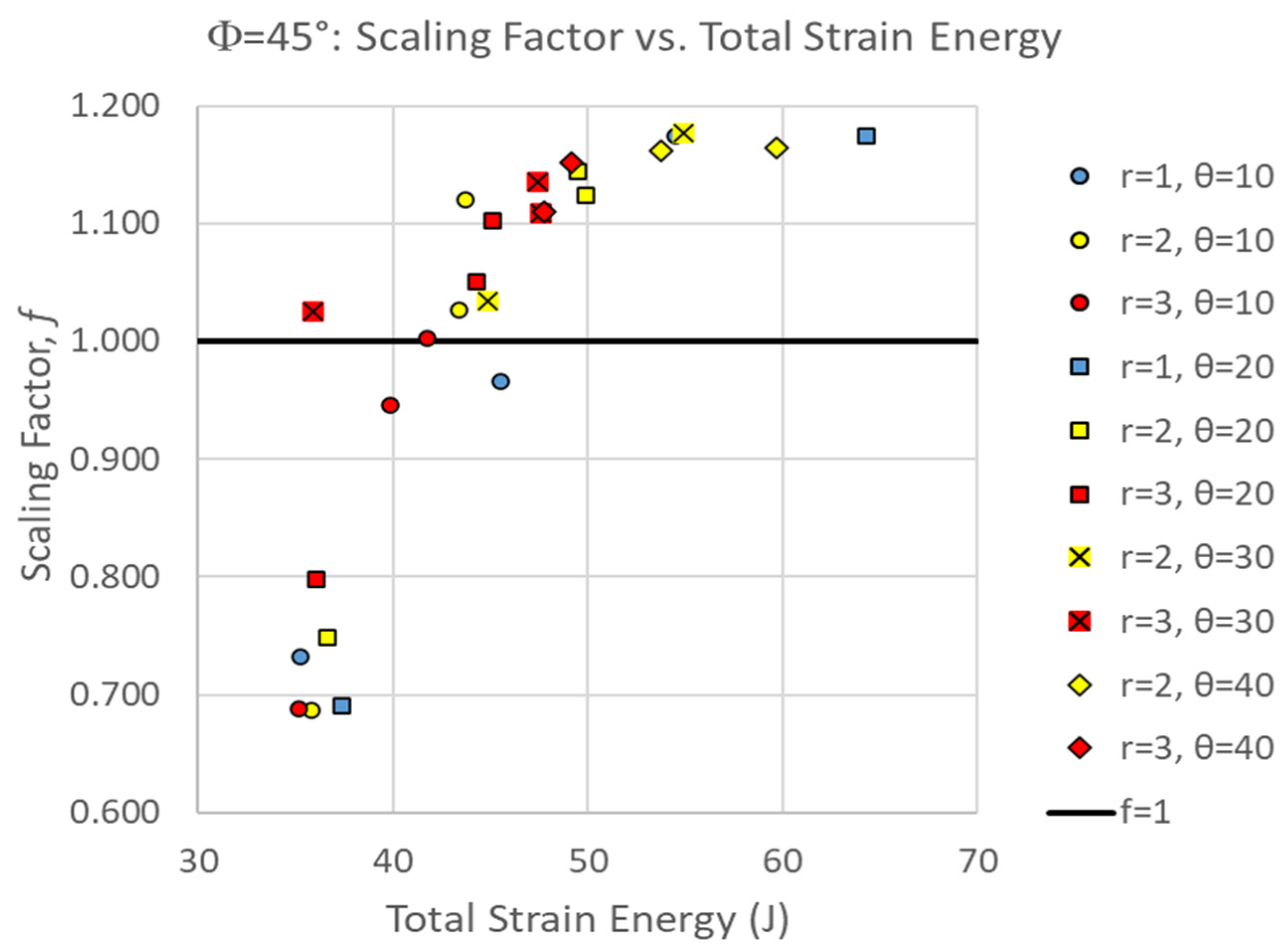
3.2. Φ = 45° Archways
4. Discussion
4.1. Global Versus Local Toughness
4.2. Limitations
- Increased segmentation (when holding the indenter placement constant) does not improve global performance in terms of stiffness and toughness [27].
- Strain energy localization effects positively correlate with global toughness, indicating that the best suture geometries for global toughness are also adept for isolating damage to a local area, regardless of indenter placement. However, there is some nuance in selecting which suture geometries ensure better performance in both global and local metrics. Ideally, a geometry that is highly ranked in both global and local strain energy absorption should be selected. Of course, some segmentation is needed for localization effects to even be present; this presents a trade-off between global and local toughness, as global toughness is compromised when segmentation is increased.
- Indentation on a face (Φ = 60°) rather than a suture (Φ = 45° or Φ = 90°) appears to improve both global and local performance in terms of stiffness and toughness. However, this external variable is unpredictable in a real-case scenario, i.e., a user would have no practical way to control where impact occurs on a helmet. This is why cross-checking results in different segmentation conditions is important; we found that optimizing based on the Φ = 45° performance is preferable, as the corresponding response (global and local) in the Φ = 60° archways tends to be quite good. This finding could be strengthened by further studies to standardize the process of suture geometry selection.
- The “best” suture geometries in the Φ = 45° archway are only slightly compromised in the Φ = 60° archway, whereas the reverse is not true. Generally speaking, the Φ = 60° archway is less sensitive to suture geometry changes [27], both for global and local effects. Therefore, we should design around the impact on a suture, knowing that when we indent far away from a suture, the structure will still perform well.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McKittrick, J.; Chen, P.Y.; Tombolato, L.; Novitskaya, E.E.; Trim, M.W.; Hirata, G.A.; Olevsky, E.A.; Horstemeyer, M.F.; Meyers, M.A. Energy Absorbent Natural Materials and Bioinspired Design Strategies: A Review. Mater. Sci. Eng. C 2010, 30, 331–342. [Google Scholar] [CrossRef]
- Naleway, S.E.; Porter, M.M.; McKittrick, J.; Meyers, M.A. Structural Design Elements in Biological Materials: Application to Bioinspiration. Adv. Mater. 2015, 27, 5455–5476. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.A.; Ross, B.E.; Klotz, L.E. Lessons from a Coral Reef: Biomimicry for Structural Engineers. J. Struct. Eng. 2015, 141, 02514002. [Google Scholar] [CrossRef]
- Chen, D.A.; Ross, B.E.; Klotz, L.E. Parametric Analysis of a Spiraled Shell: Learning from Nature’s Adaptable Structures. Designs 2018, 2, 46. [Google Scholar] [CrossRef]
- Ingrole, A.; Aguirre, T.G.; Fuller, L.; Donahue, S.W. Bioinspired Energy Absorbing Material Designs Using Additive Manufacturing. J. Mech. Behav. Biomed. Mater. 2021, 119, 104518. [Google Scholar] [CrossRef]
- Miura, T.; Perlyn, C.A.; Kinboshi, M.; Ogihara, N.; Kobayashi-Miura, M.; Morriss-Kay, G.M.; Shiota, K. Mechanism of Skull Suture Maintenance and Interdigitation. J. Anat. 2009, 215, 642–655. [Google Scholar] [CrossRef] [PubMed]
- Krauss, S.; Monsonego-Ornan, E.; Zelzer, E.; Fratzl, P.; Shahar, R. Mechanical Function of a Complex Three-Dimensional Suture Joining the Bony Elements in the Shell of the Red-Eared Slider Turtle. Adv. Mater. 2009, 21, 407–412. [Google Scholar] [CrossRef]
- Lee, N.; Horstemeyer, M.F.; Rhee, H.; Nabors, B.; Liao, J.; Williams, L.N. Hierarchical Multiscale Structure—Property Relationships of the Red-Bellied Woodpecker (Melanerpes carolinus) Beak. J. R. Soc. Interface 2014, 11, 20140274. [Google Scholar] [CrossRef] [PubMed]
- Fratzl, P.; Kolednik, O.; Fischer, F.D.; Dean, M.N. The Mechanics of Tessellations-Bioinspired Strategies for Fracture Resistance. Chem. Soc. Rev. 2016, 45, 252–267. [Google Scholar] [CrossRef] [PubMed]
- Achrai, B.; Wagner, H.D. The Turtle Carapace as an Optimized Multi-Scale Biological Composite Armor—A Review. J. Mech. Behav. Biomed. Mater. 2017, 73, 50–67. [Google Scholar] [CrossRef]
- Hoshizaki, T.B.; Post, A.; Oeur, R.A.; Brien, S.E. Current and Future Concepts in Helmet and Sports Injury Prevention. Neurosurgery 2014, 75, S136–S148. [Google Scholar] [CrossRef]
- Goutnik, M.; Goeckeritz, J.; Sabetta, Z.; Curry, T.; Willman, M.; Willman, J.; Currier Thomas, T.; Lucke-Wold, B. Neurotrauma Prevention Review: Improving Helmet Design and Implementation. Biomechanics 2022, 2, 500–512. [Google Scholar] [CrossRef]
- Achrai, B.; Wagner, H.D. Micro-Structure and Mechanical Properties of the Turtle Carapace as a Biological Composite Shield. Acta Biomater. 2013, 9, 5890–5902. [Google Scholar] [CrossRef]
- Achrai, B.; Bar-On, B.; Wagner, H.D. Bending Mechanics of the Red-Eared Slider Turtle Carapace. J. Mech. Behav. Biomed. Mater. 2014, 30, 223–233. [Google Scholar] [CrossRef]
- Peng, Z.; Feng, W.; Huang, J.; Li, P.; Chen, S. Three-Dimensional Hierarchical Microstructures of the Suture of Turtle Shell and Its Effect on the Mechanical Properties. Eng. Fract. Mech. 2023, 285, 109302. [Google Scholar] [CrossRef]
- Lin, E.; Li, Y.; Ortiz, C.; Boyce, M.C. 3D Printed, Bio-Inspired Prototypes and Analytical Models for Structured Suture Interfaces with Geometrically-Tuned Deformation and Failure Behavior. J. Mech. Phys. Solids 2014, 73, 166–182. [Google Scholar] [CrossRef]
- Lin, E.; Li, Y.; Weaver, J.C.; Ortiz, C.; Boyce, M.C. Tunability and Enhancement of Mechanical Behavior with Additively Manufactured Bio-Inspired Hierarchical Suture Interfaces. J. Mater. Res. 2014, 29, 1867–1875. [Google Scholar] [CrossRef]
- Wu, D.; Huang, Y.; Lei, M.; Zhao, Z.; Guo, X.; Fang, D. Stiffness and Toughness of Soft/Stiff Suture Joints in Biological Composites. Appl. Math. Mech. (Engl. Ed.) 2022, 43, 1469–1484. [Google Scholar] [CrossRef]
- Malik, I.A.; Mirkhalaf, M.; Barthelat, F. Bio-Inspired “Jigsaw”-like Interlocking Sutures: Modeling, Optimization, 3D Printing and Testing. J. Mech. Phys. Solids 2017, 102, 224–238. [Google Scholar] [CrossRef]
- Malik, I.A.; Barthelat, F. Bioinspired Sutured Materials for Strength and Toughness: Pullout Mechanisms and Geometric Enrichments. Int. J. Solids Struct. 2018, 138, 118–133. [Google Scholar] [CrossRef]
- Xing, Y.; Yang, C.; Sun, S.-Y.; Zhao, Z.-L.; Feng, X.-Q.; Yang, J.; Gao, H. Mechanics of Elliptical Interlocking Sutures in Biological Interfaces. Acta Biomater. 2025, 192, 90–100. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z.; Xiao, H.; Duan, Y.; Wang, B. Accelerating Optimization Design of Bio-Inspired Interlocking Structures with Machine Learning. Acta Mech. Solida Sin. 2023, 36, 783–793. [Google Scholar] [CrossRef]
- Katz, Z.; Yazdani Sarvestani, H.; Gholipour, J.; Ashrafi, B. Bioinspired Hierarchical Ceramic Sutures for Multi-Modal Performance. Adv. Mater. Interfaces 2023, 10, 2300098. [Google Scholar] [CrossRef]
- Wickramasinghe, S.; Al-Ketan, O.; Peng, C.; Tee, Y.L.; Kajtaz, M.; Tran, P. Influence of Design Parameters on the Flexural Properties of a Bio-Inspired Suture Structure. Virtual Phys. Prototyp. 2023, 18, e2204845. [Google Scholar] [CrossRef]
- Wu, D.; Zhao, Z.; Gao, H. An Interface-Enhanced Discrete Element Model (I-DEM) of Bio-Inspired Flexible Protective Structures. Comput. Methods Appl. Mech. Eng. 2024, 420, 116702. [Google Scholar] [CrossRef]
- Gibbons, M.M.; Chen, D.A. Bio-Inspired Sutures: Using Finite Element Analysis to Parameterize the Mechanical Response of Dovetail Sutures in Simulated Bending of a Curved Structure. Biomimetics 2022, 7, 82. [Google Scholar] [CrossRef]
- Gibbons, M.M.; Chen, D.A. Bio-Inspired Sutures: Simulating the Role of Suture Placement in the Mechanical Response of Interlocking Structures. Biomimetics 2023, 8, 515. [Google Scholar] [CrossRef] [PubMed]
- Kiakojouri, F.; De Biagi, V.; Abbracciavento, L. Design for Robustness: Bio-Inspired Perspectives in Structural Engineering. Biomimetics 2023, 8, 95. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Best Global Suture Geometry | Best Local Suture Geometry | |
|---|---|---|
| Φ = 45° | θ = 20°, r = 1 mm, and L = 2 mm | θ = 30°, r = 2 mm, and L = 2 mm |
| f = 1.174 (99.8%) | f = 1.176 (100%) | |
| stotal = 64.269 J (100%) | stotal = 54.93 J (85.5%) | |
| Φ = 60° | θ = 0°, r = 1 mm, and L = 0 mm | θ = 30°, r = 4 mm, and L = 3 mm |
| f = 1.477 (95.8%) | f = 1.542 (100%) | |
| stotal = 73.316 J (100%) | stotal = 70.776 J (96.2%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.A.; Gibbons, M.M. Bio-Inspired Sutures: Localizing Damage by Isolating Strain Energy. Biomimetics 2025, 10, 102. https://doi.org/10.3390/biomimetics10020102
Chen DA, Gibbons MM. Bio-Inspired Sutures: Localizing Damage by Isolating Strain Energy. Biomimetics. 2025; 10(2):102. https://doi.org/10.3390/biomimetics10020102
Chicago/Turabian StyleChen, Diana A., and Melissa M. Gibbons. 2025. "Bio-Inspired Sutures: Localizing Damage by Isolating Strain Energy" Biomimetics 10, no. 2: 102. https://doi.org/10.3390/biomimetics10020102
APA StyleChen, D. A., & Gibbons, M. M. (2025). Bio-Inspired Sutures: Localizing Damage by Isolating Strain Energy. Biomimetics, 10(2), 102. https://doi.org/10.3390/biomimetics10020102