
Use of Virtual Reality to Increase Awareness of Line-of-Sight Hazards around Industrial Equipment


Abstract
:
1. Introduction
2. Materials and Methods
3. Results
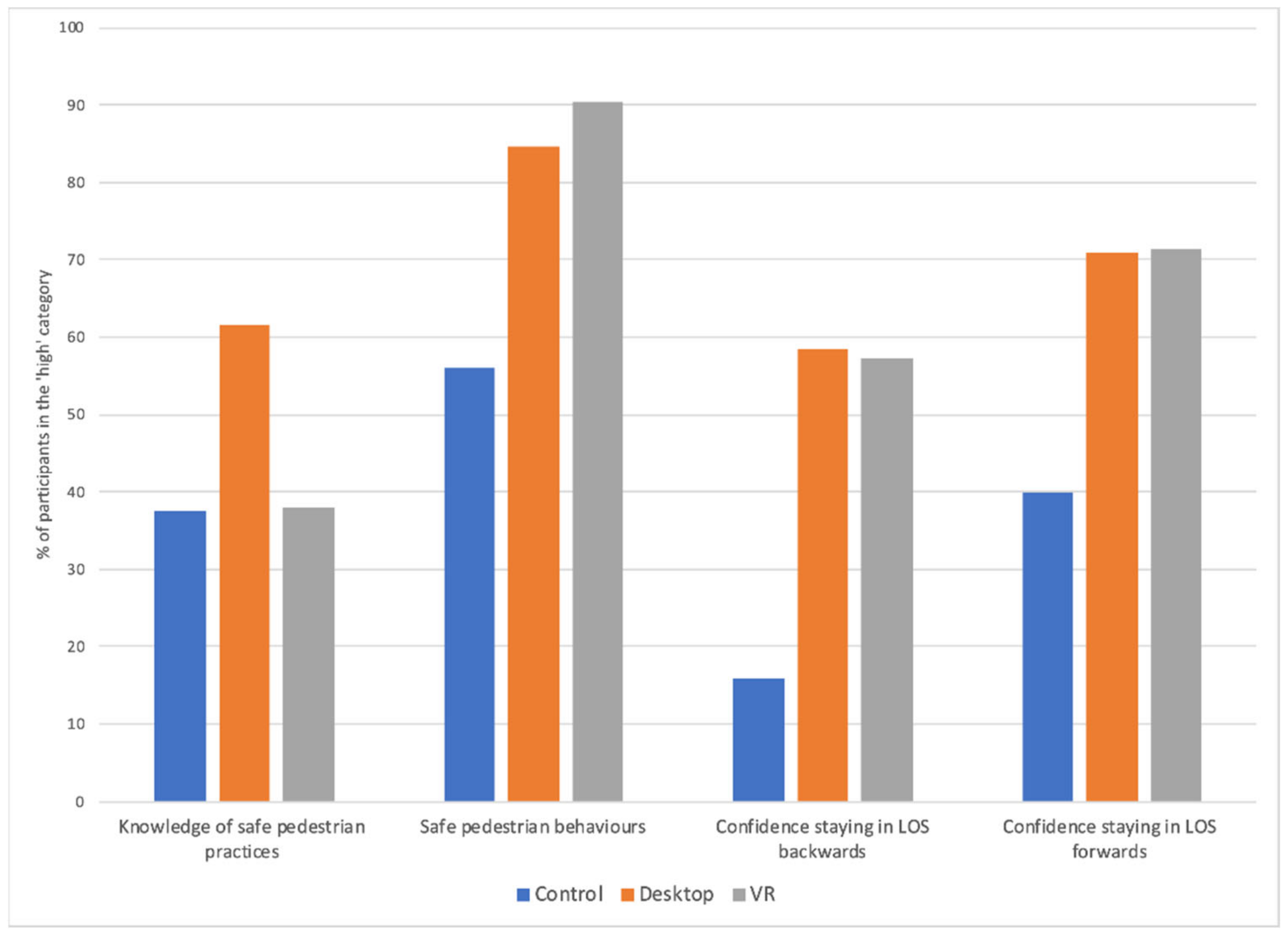
3.1. Self-Assessment of Confidence, Knowledge and Behaviors
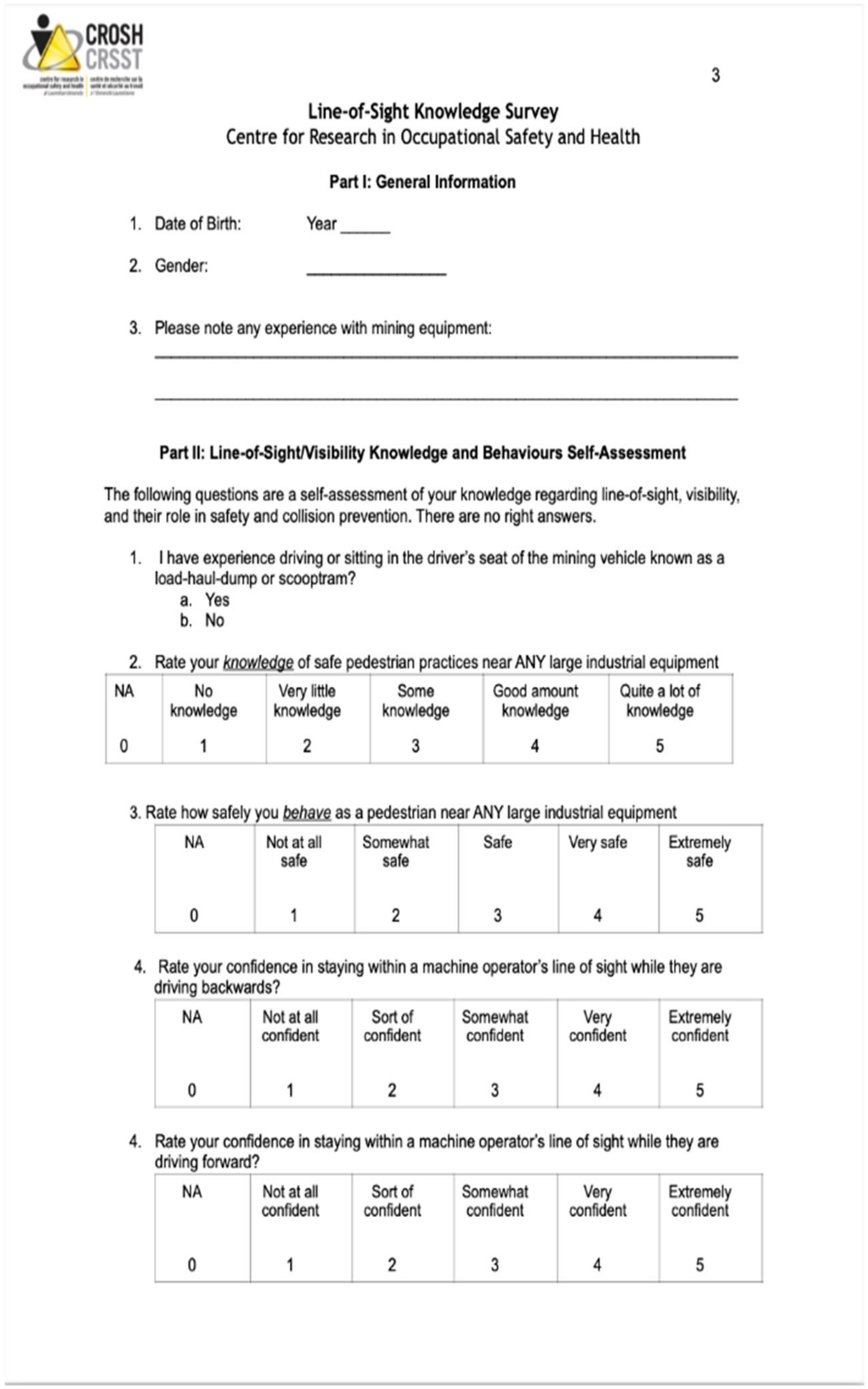
3.1.1. Self-Assessment of Safe Pedestrian Behaviors and Knowledge
3.1.2. Self-Assessment of Confidence in Remaining in Operator LOS
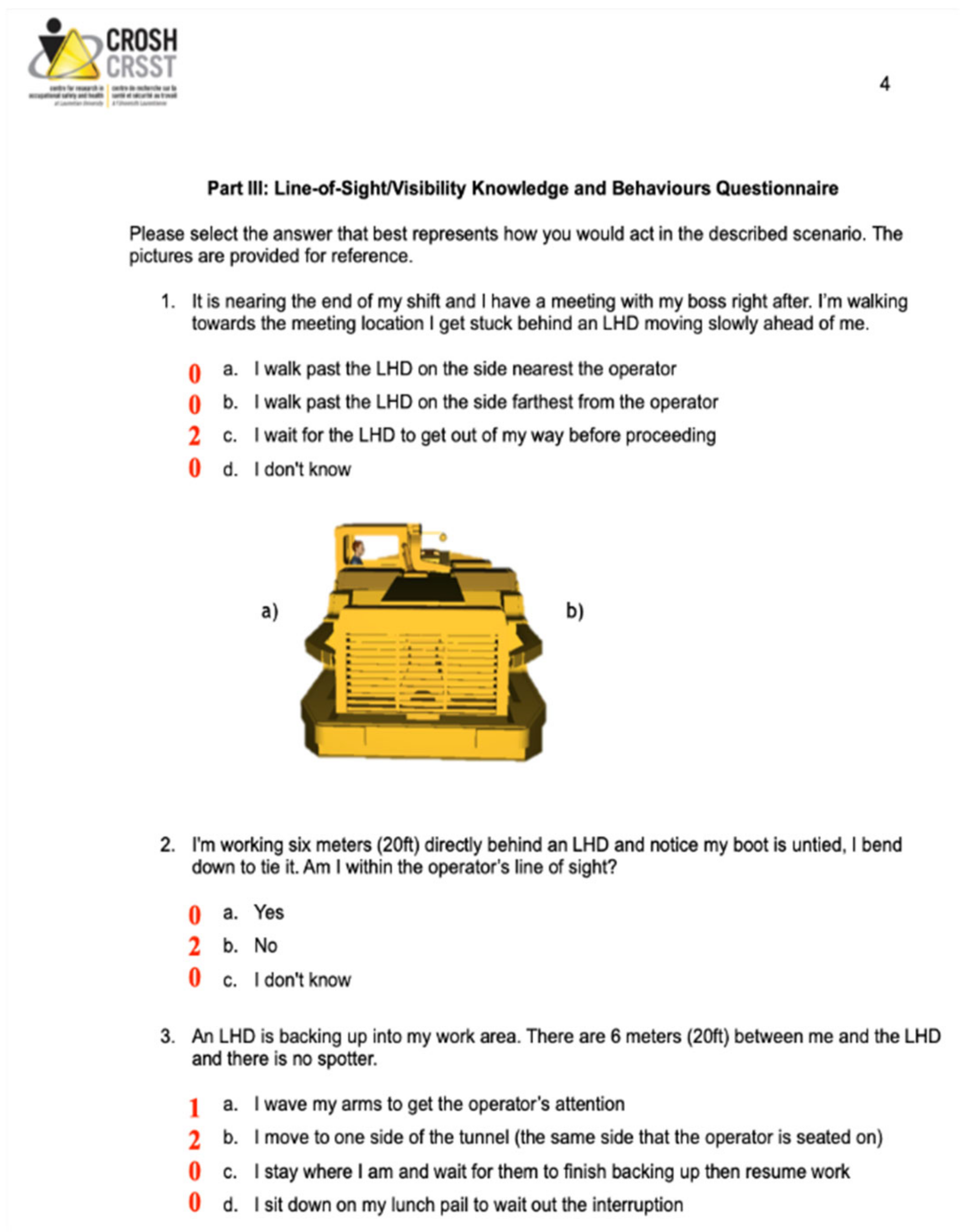
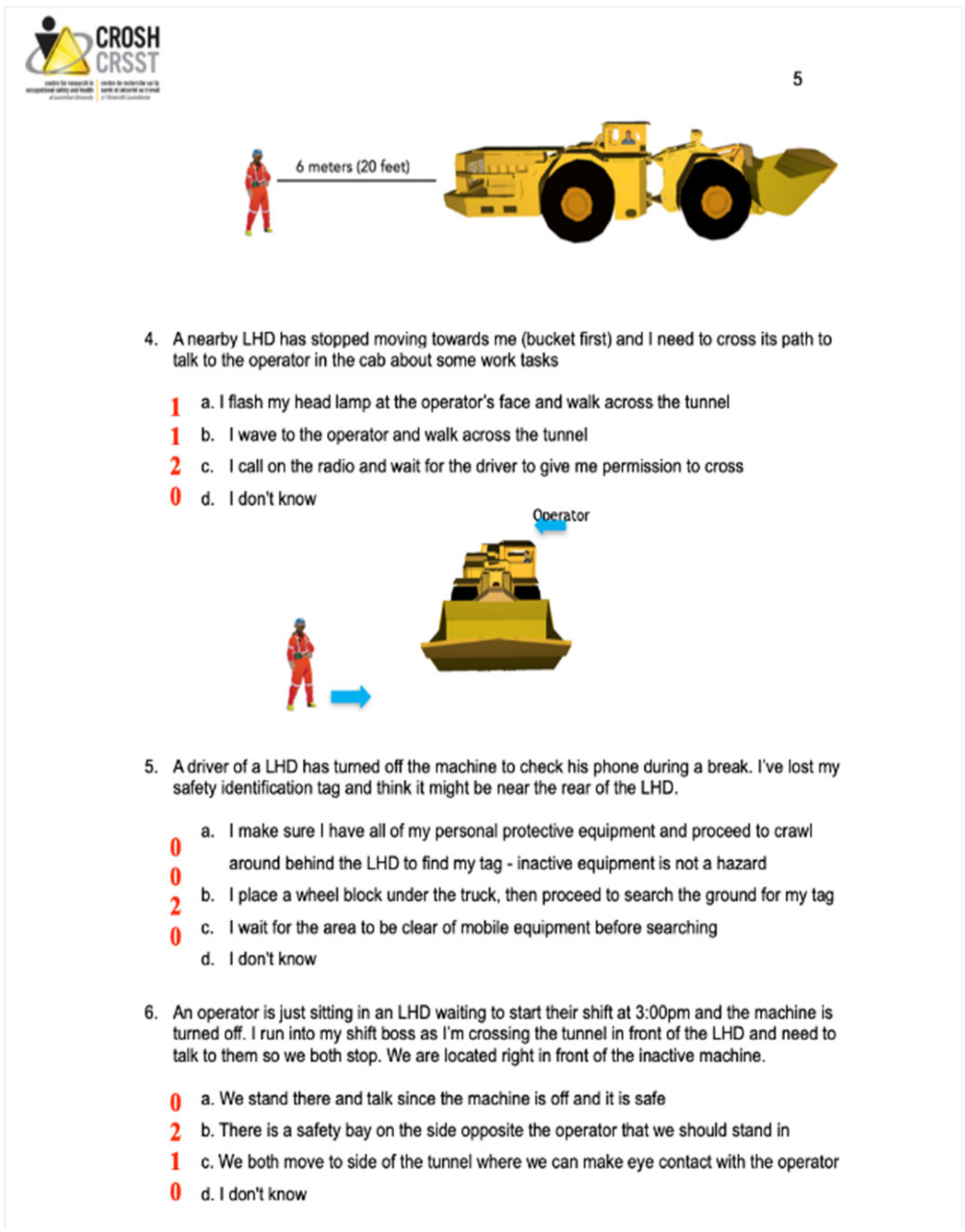
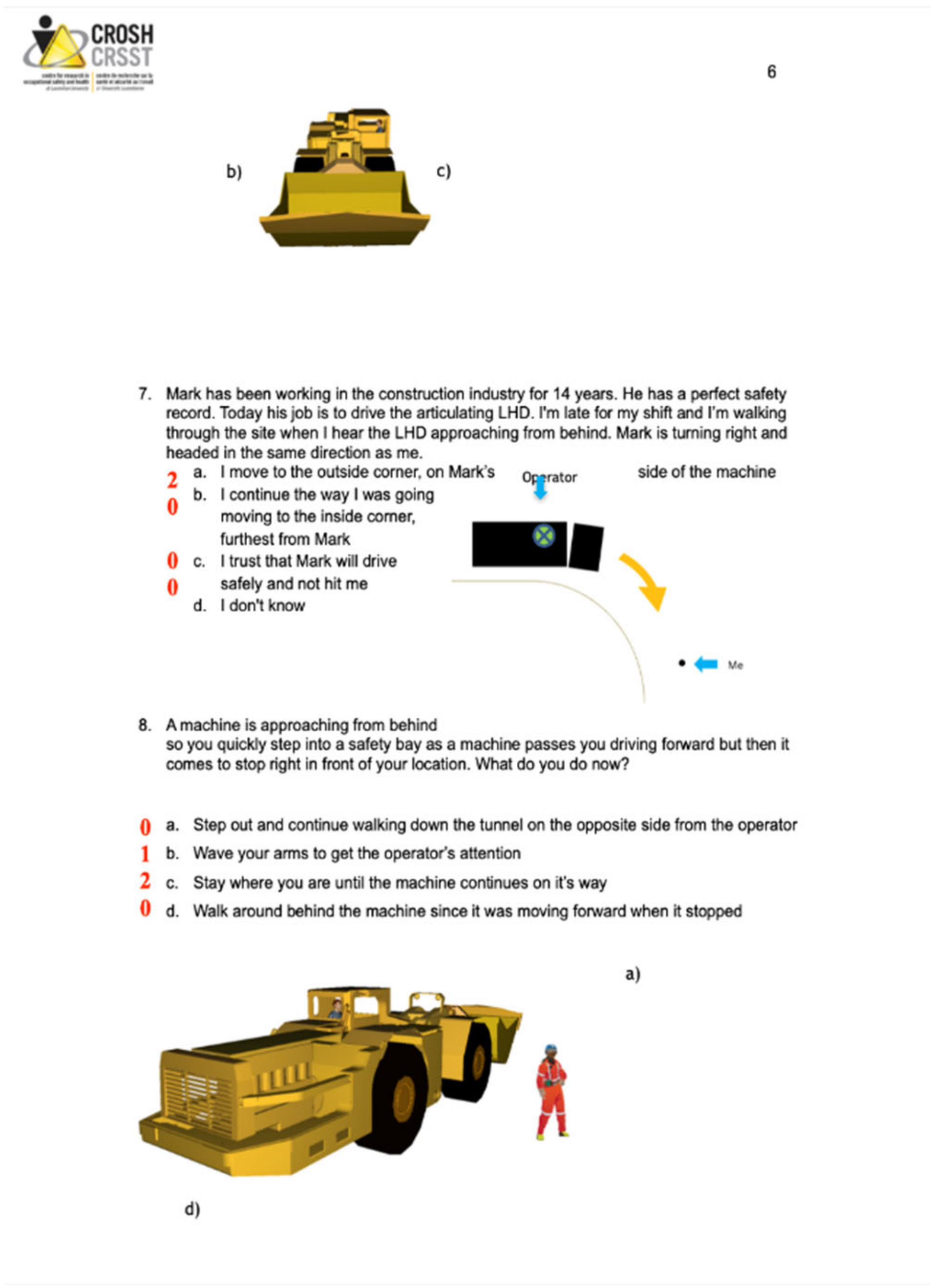
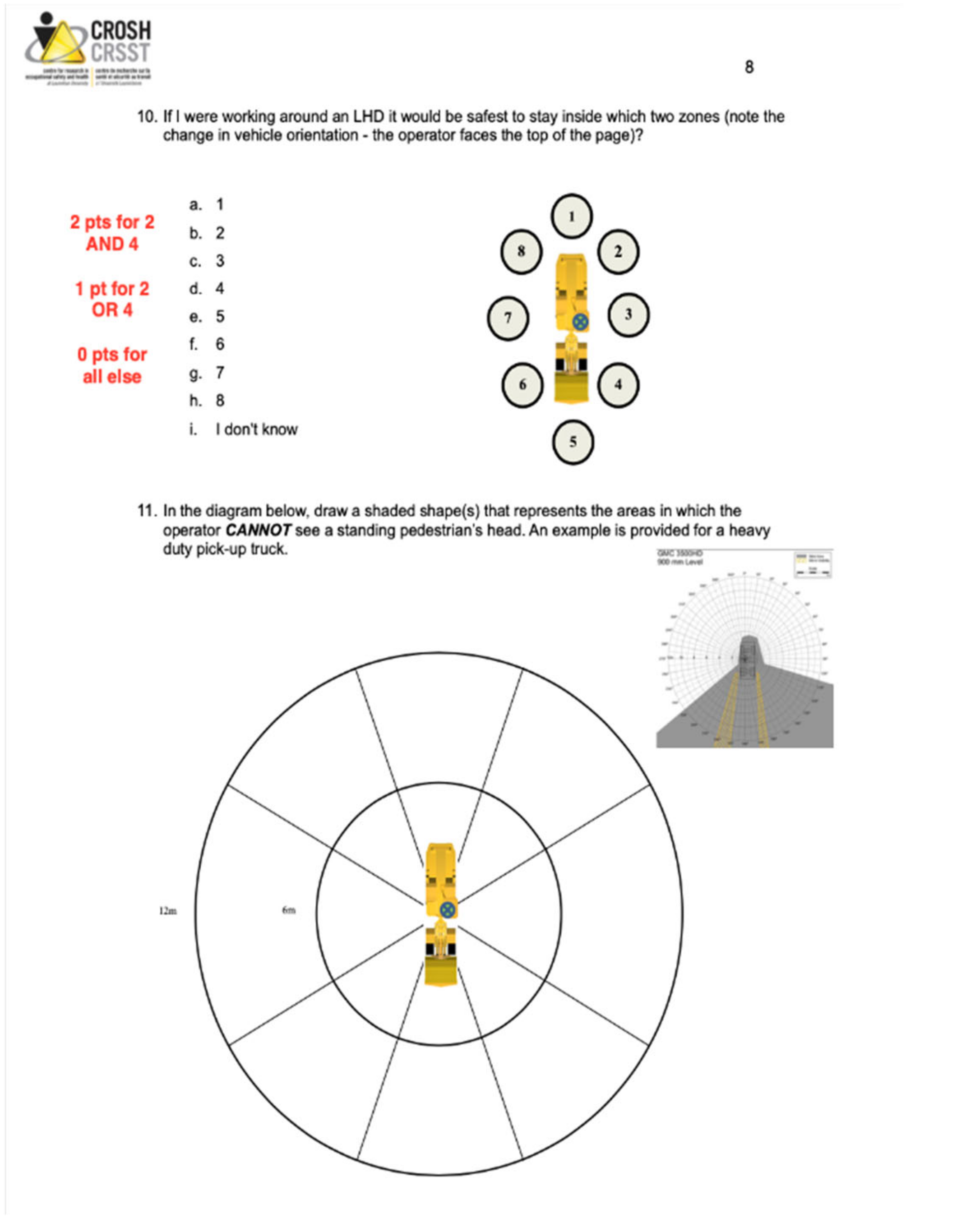
3.2. Multiple-Choice Questionnaire
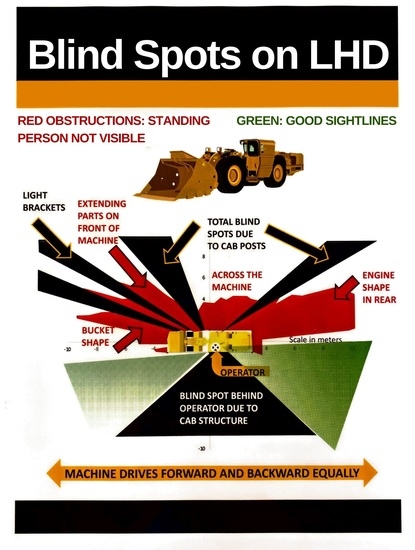
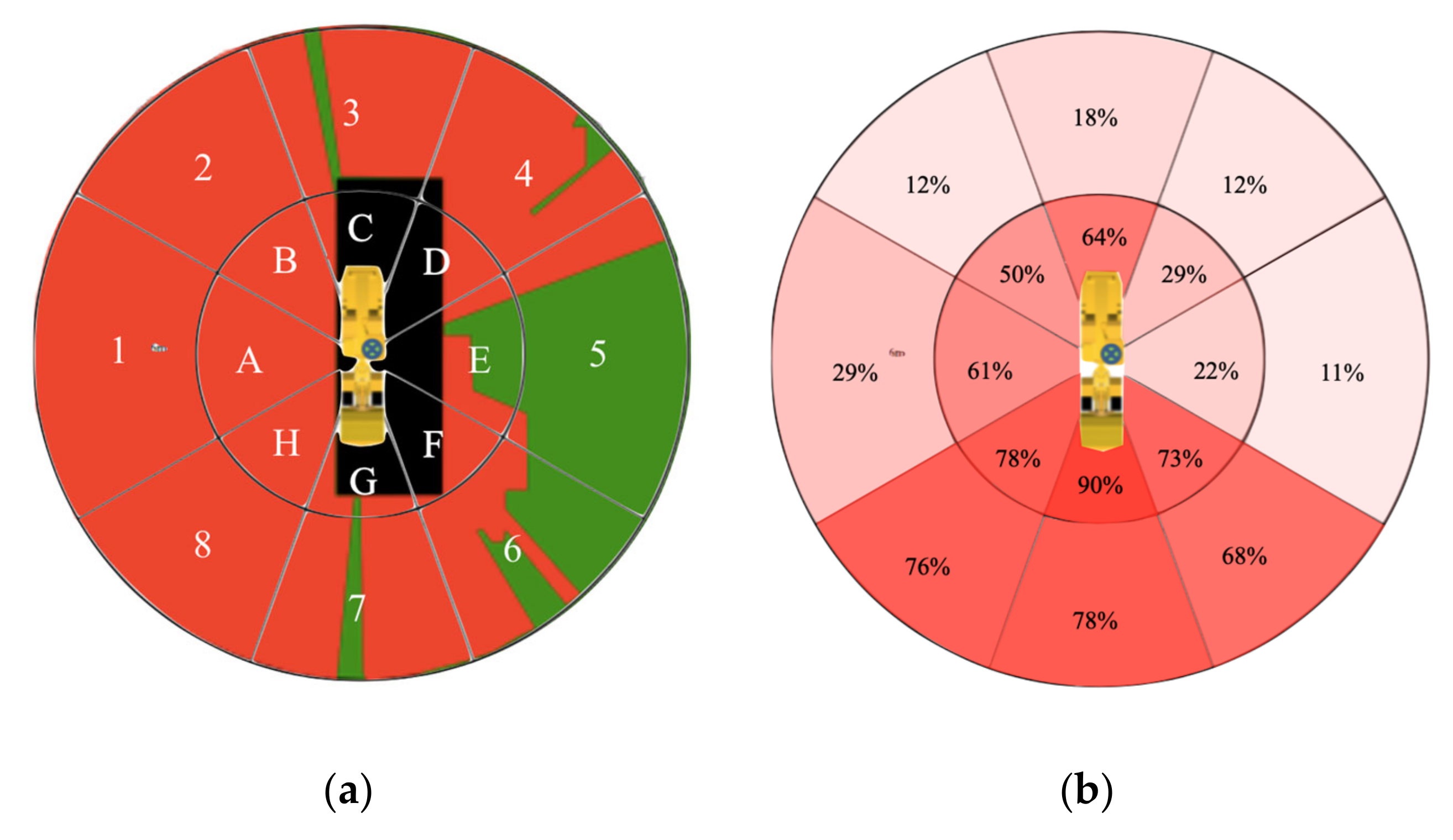
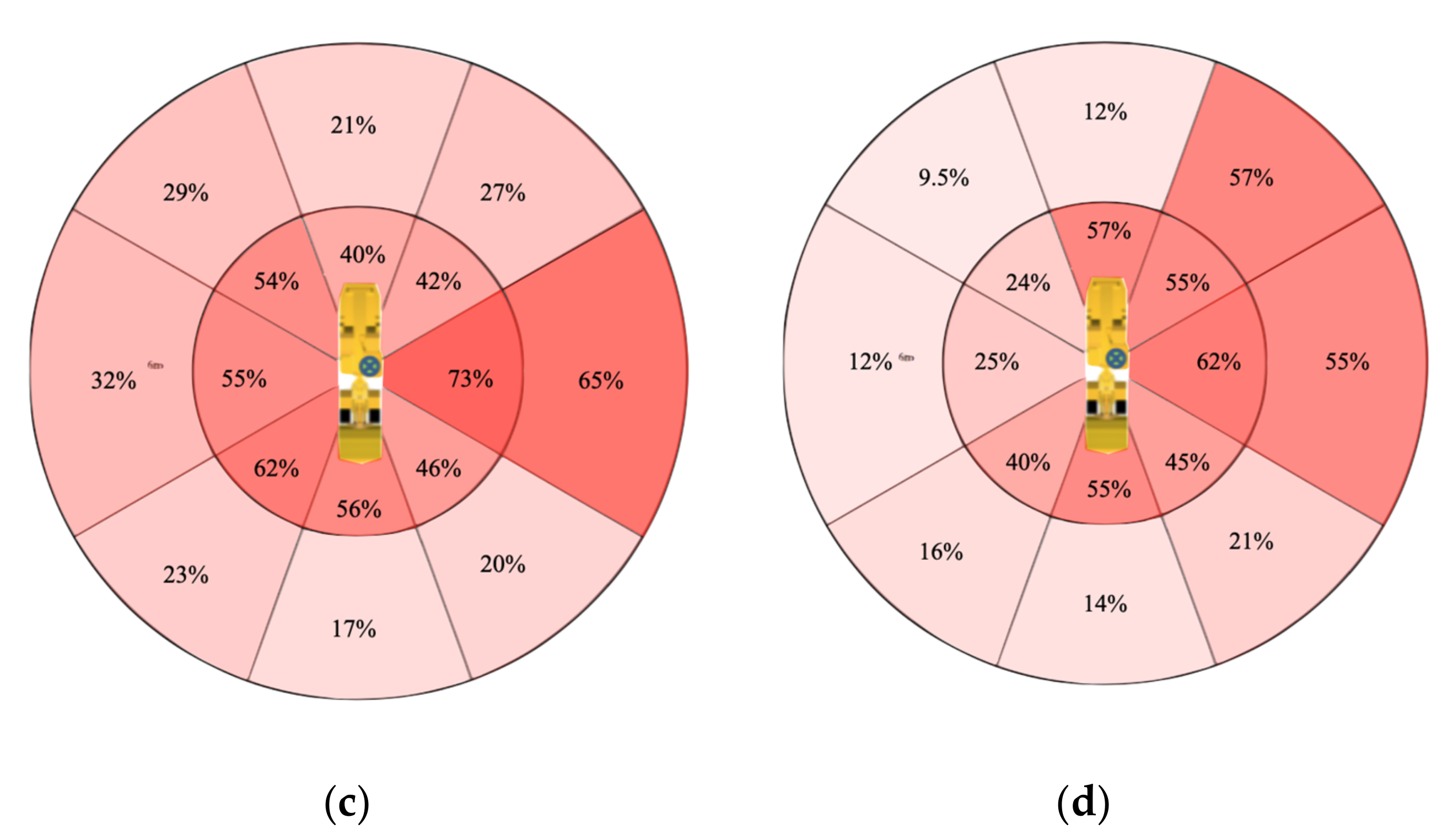
3.3. Visibility Plot
4. Discussion
4.1. Trainee Confidence
4.2. Visibility Knowledge and Safe Pedestrian Behaviors
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Knight, C.E.J. The Mediating Role of Mindfulness, Attention and Situational Awareness on Driving Performance in a Virtual Reality Underground Mine; Laurentian University: Sudbury, ON, Canada, 2018. [Google Scholar]
- Eger, T.; Godwin, A.; Grenier, S. Using Visibility Tools in Classic JACK to Assess Line-of-Sight Issues Associated with the Operation of Mobile Equipment. Int. J. Hum. Factors Model. Simul. 2010, 1, 406–419. [Google Scholar] [CrossRef]
- Eger, T.; Salmoni, A.; Whissell, R. Factors Influencing Load-Haul-Dump Operator Line of Sight in Underground Mining. Appl. Ergon. 2004, 35, 93–103. [Google Scholar] [CrossRef] [PubMed]
- Godwin, A.; Eger, T.; Salmoni, A.; Grenier, S.; Dunn, P. Postural Implications of Obtaining Line–of–Sight for Seated Operators of Underground Mining Load-Haul-Dump Vehicles. Ergonomics 2007, 50, 192–207. [Google Scholar] [CrossRef]
- Bhattacherya, T.; Dunn; Eger, P. Development of a New Operator Visibility Assessment Technique for Mobile Equipment. J. South Afr. Inst. Min. Metall. 2006, 106, 87–92. [Google Scholar]
- Hinze, J.W.; Teizer, J. Visibility-Related Fatalities Related to Construction Equipment. Saf. Sci. 2011, 49, 709–718. [Google Scholar] [CrossRef]
- Godwin, A.; Eger, T.; Corrigan, L.; Grenier, S. Classic JACK Modelling of Driver Posture and Line-of-Sight for Operators of Lift-Trucks. Int. J. Hum. Factors Model. Simul. 2010, 1, 259. [Google Scholar] [CrossRef]
- Archived—Appendix A: Statistical Charts|Occupational Health and Safety in Ontario April 2017–March 2018. Available online: http://www.ontario.ca/document/occupational-health-and-safety-ontario-april-2017-march-2018/appendix-statistical-charts (accessed on 17 May 2022).
- Groves, W.A.; Kecojevic, V.J.; Komljenovic, D. Analysis of Fatalities and Injuries Involving Mining Equipment. J. Safety Res. 2007, 38, 461–470. [Google Scholar] [CrossRef] [PubMed]
- Workplace Health and Safety Snapshot for Ontario Mining Sector in 2019. Available online: http://www.ontario.ca/page/workplace-health-and-safety (accessed on 17 May 2022).
- Government of Canada, C.C. for O.H. and S. CCOHS: Health and Safety Report—Past Issues. Available online: https://www.ccohs.ca/newsletters/hsreport/issues/2014/10/ezine.html (accessed on 17 May 2022).
- Stemn, E.; Krampah, F. Injury Severity and Influence Factors in Surface Mines: A Correspondence Analysis. Saf. Sci. 2022, 145, 105495. [Google Scholar] [CrossRef]
- Stemn, E. Analysis of Injuries in the Ghanaian Mining Industry and Priority Areas for Research. Saf. Health Work 2019, 10, 151–165. [Google Scholar] [CrossRef]
- Leduc, M.; Vance, B.; Eger, T.; Godwin, A. Findings from a Visibility Survey in the Construction Industry. Transp. Res. Interdiscip. Perspect. 2019, 2, 100056. [Google Scholar] [CrossRef]
- Oliver, A.; Cheyne, A.; Tomás, J.M.; Cox, S. The Effects of Organizational and Individual Factors on Occupational Accidents. J. Occup. Organ. Psychol. 2002, 75, 473–488. [Google Scholar] [CrossRef]
- Olson, R.; Grosshuesch, A.; Schmidt, S.; Gray, M.; Wipfli, B. Observational Learning and Workplace Safety: The Effects of Viewing the Collective Behavior of Multiple Social Models on the Use of Personal Protective Equipment. J. Safety Res. 2009, 40, 383–387. [Google Scholar] [CrossRef] [PubMed]
- Reddy, R.K.; Welch, D.; Thorne, P.; Ameratunga, S. Hearing Protection Use in Manufacturing Workers: A Qualitative Study. Noise Health 2012, 14, 202. [Google Scholar] [CrossRef] [PubMed]
- Dingsdag, D.; Biggs, H.; Sheahan, V. Understanding and Defining OH&S Competency for Construction Site Positions: Worker Perceptions. Saf. Sci. 2008, 46, 619–633. [Google Scholar] [CrossRef] [Green Version]
- Dzeng, R.-J.; Hsueh, H.-H.; Chang, R.-N. 3D Game-Based Training System for Hazard Identification on Construction Site. In Proceedings of the 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; pp. 2453–2458. [Google Scholar]
- Burke, M.J.; Sarpy, S.A.; Smith-Crowe, K.; Chan-Serafin, S.; Salvador, R.O.; Islam, G. Relative Effectiveness of Worker Safety and Health Training Methods. Am. J. Public Health 2006, 96, 315–324. [Google Scholar] [CrossRef] [PubMed]
- Sacks, R.; Perlman, A.; Barak, R. Construction Safety Training Using Immersive Virtual Reality. Constr. Manag. Econ. 2013, 31, 1005–1017. [Google Scholar] [CrossRef]
- Schofield, D.; Hollands, R.; Denby, B. Mine Safety in the Twenty-First Century: The Application of Computer Graphics and Virtual Reality. In Mine Health and Safety Management; Society for Mining Metallurgy: Englewood, CO, USA, 2001; pp. 153–174. ISBN 978-0-87335-200-0. [Google Scholar]
- Van Wyk, E.; de Villiers, R. Virtual Reality Training Applications for the Mining Industry. In Proceedings of the 6th International Conference on Computer Graphics, Virtual Reality, Visualisation and Interaction in Africa, Pretoria, South Africa, 4–6 February 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 53–63. [Google Scholar]
- Tichon, D.J.; Burgess-Limerick, D.R. A Review of Virtual Reality as a Medium for Safety Related Training in Mining. J. Health Saf. Res. Pract. 2011, 3, 33–40. [Google Scholar]
- Li, Q.; Tay, R. Improving Drivers’ Knowledge of Road Rules Using Digital Games. Accid. Anal. Prev. 2014, 65, 8–10. [Google Scholar] [CrossRef]
- Godwin, A.; Knight, C.; Schwabe, N.; Eger, T. Virtual Reality as a Useful Mode of Imparting Line of Sight Knowledge. In Proceedings of the Proceedings of the 47th Annual Conference of the Association of Canadian Ergonomists, Niagara Falls, ON, Canada, 18 October 2016. [Google Scholar]
- Zujovic, L.; Kecojevic, V.; Bogunovic, D. Interactive Mobile Equipment Safety Task-Training in Surface Mining. Int. J. Min. Sci. Technol. 2021, 31, 743–751. [Google Scholar] [CrossRef]
- Orr, T.; Filigenzi, M.T.; Ruff, T.M. Hazard Recognition—Computer Based Simulation. In Proceedings of the 30th Annual Institute on Mining Health, Safety and Research, Salt Lake City, UT, USA, 8 August 1999. [Google Scholar]
- Filigenzi, M.; Orr, T.; Ruff, T. Virtual Reality for Mine Safety Training. Appl. Occup. Environ. Hyg. 2000, 15, 465–469. [Google Scholar] [CrossRef]
- Squelch, A.P. Virtual Reality for Mine Safety Training in South Africa. J. South Afr. Inst. Min. Metall. 2001, 101, 209–216. [Google Scholar]
- Isleyen, E.; Duzgun, H.S. Use of Virtual Reality in Underground Roof Fall Hazard Assessment and Risk Mitigation. Int. J. Min. Sci. Technol. 2019, 29, 603–607. [Google Scholar] [CrossRef]
- Fisher, D.L.; Pollatsek, A.P.; Pradhan, A. Can Novice Drivers Be Trained to Scan for Information That Will Reduce Their Likelihood of a Crash? Inj. Prev. 2006, 12, i25–i29. [Google Scholar] [CrossRef] [PubMed]
- Pollatsek, A.; Narayanaan, V.; Pradhan, A.; Fisher, D.L. Using Eye Movements to Evaluate a PC-Based Risk Awareness and Perception Training Program on a Driving Simulator. Hum. Factors 2006, 48, 447–464. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.C.; Hosking, S.G.; Lenné, M.G. Hazard Perception Abilities of Experienced and Novice Motorcyclists: An Interactive Simulator Experiment. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 325–334. [Google Scholar] [CrossRef]
- Kowalski-Trakofler, K.M.; Barrett, E.A. The Concept of Degraded Images Applied to Hazard Recognition Training in Mining for Reduction of Lost-Time Injuries. J. Safety Res. 2003, 34, 515–525. [Google Scholar] [CrossRef]
- Lundeberg, M.A.; Fox, P.W.; Punćcohaŕ, J. Highly Confident but Wrong: Gender Differences and Similarities in Confidence Judgments. J. Educ. Psychol. 1994, 86, 114–121. [Google Scholar] [CrossRef]
- Mining in Ontario: The Latest Trends and Industry Outlook. Available online: https://www.oma.on.ca/en/resourcesGeneral/OMA-Economic-Report.pdf (accessed on 9 April 2021).
- Joshi, S.; Hamilton, M.; Warren, R.; Faucett, D.; Tian, W.; Wang, Y.; Ma, J. Implementing Virtual Reality Technology for Safety Training in the Precast/Prestressed Concrete Industry. Appl. Ergon. 2021, 90, 103286. [Google Scholar] [CrossRef]
- Visibility Project Fact Sheet: Line of Sight Assessment-1. Available online: https://www.workplacesafetynorth.ca/sites/default/files/Safe%20Operator%20-%20Line%20of%20Sight,%20Assessment%20-%20Resource%20Sheet.pdf (accessed on 8 April 2021).
- West, J.; Haywood, M.; Dunn, P.; Eger, T.; Grenier, S.; Whissel, C. Comparison of Operator Line-of-Sight (LOS) Assessment Techniques: Evaluation of an Underground Load-Haul-Dump (LHD) Mobile Mining Vehicle. J. South Afr. Inst. Min. Metall. 2007, 107, 315–321. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | N | % in High Category | p |
|---|---|---|---|
| Self-reported safe pedestrian behaviors after intervention | |||
| Control | 25 | 56 | |
| Desktop | 26 | 88 | 0.006 |
| VR | 21 | 91 | |
| Self-reported confidence levels in remaining within operator LOS in reverse direction after intervention | |||
| Control | 25 | 16 | |
| Desktop | 26 | 58 | 0.005 |
| VR | 21 | 57 | |
| Variable | N | Mean ± s.d. | p |
| Multiple-choice questionnaire score (total, %) | |||
| Control | 25 | 63 ± 18 | |
| Desktop | 26 | 59 ± 16 | 0.291 |
| VR | 21 | 66 ± 13 | |
| Multiple-choice questionnaire score (front-facing, %) | |||
| Control | 25 | 74 ± 23 | |
| Desktop | 26 | 71 ± 15 | 0.161 |
| VR | 21 | 81 ± 17 | |
| Multiple-choice questionnaire score (rear-facing, %) | |||
| Control | 25 | 63 ± 28 | |
| Desktop | 26 | 71 ± 24 | 0.179 |
| VR | 21 | 78 ± 18 | |
| Overall visibility plot shading accuracy | |||
| Control | 25 | 1.28 ± 0.74 | |
| Desktop | 26 | 0.79 ± 0.83 | 0.021 |
| VR | 21 | 0.67 ± 0.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gauthier, S.; Leduc, M.; Perfetto, S.J.; Godwin, A. Use of Virtual Reality to Increase Awareness of Line-of-Sight Hazards around Industrial Equipment. Safety 2022, 8, 52. https://doi.org/10.3390/safety8030052
Gauthier S, Leduc M, Perfetto SJ, Godwin A. Use of Virtual Reality to Increase Awareness of Line-of-Sight Hazards around Industrial Equipment. Safety. 2022; 8(3):52. https://doi.org/10.3390/safety8030052
Chicago/Turabian StyleGauthier, Sara, Mallorie Leduc, Sara J. Perfetto, and Alison Godwin. 2022. "Use of Virtual Reality to Increase Awareness of Line-of-Sight Hazards around Industrial Equipment" Safety 8, no. 3: 52. https://doi.org/10.3390/safety8030052
APA StyleGauthier, S., Leduc, M., Perfetto, S. J., & Godwin, A. (2022). Use of Virtual Reality to Increase Awareness of Line-of-Sight Hazards around Industrial Equipment. Safety, 8(3), 52. https://doi.org/10.3390/safety8030052