Decision-Making Processes Underlying Pedestrian Behaviors at Signalized Crossing: Part 1. The First to Step off the Kerb



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. Data Scoring
2.3. Research Ethics
2.4. Data Analysis
- Quantitative variables:
- -
- The departure period, i.e., the period between the previous signal state change and the moment the pedestrian starts crossing the road. This quantitative variable is positive for pedestrians crossing at the green signal (after the signal state change) but negative for pedestrians crossing at the red signal (before the signal state change) [44,51]. Survival analyses were done on this variable used as a dependent one.
- -
- -
- The waiting time, i.e., the time between the moment a pedestrian stops at the light and the moment he/she starts crossing the road (quantitative variable; [54]).
- -
- Qualitative variables:
- -
- -
- The gender of pedestrians (qualitative variable: male or female [17]).
- -
- The age of individuals, estimated at 10-year intervals from 0–9, 10–19,…, to 70–89, based on physical characteristics. However, the number of data and the analyses we carried out did not permit the analysis of age effect (per interval) on the decision-making processes (considered as quantitative variable; [15,22]). Indeed, we observed less than 10 pedestrians for age categories lower than 20 years old and more than 60 years old.
- -
2.5. Statistical Analyses
3. Results
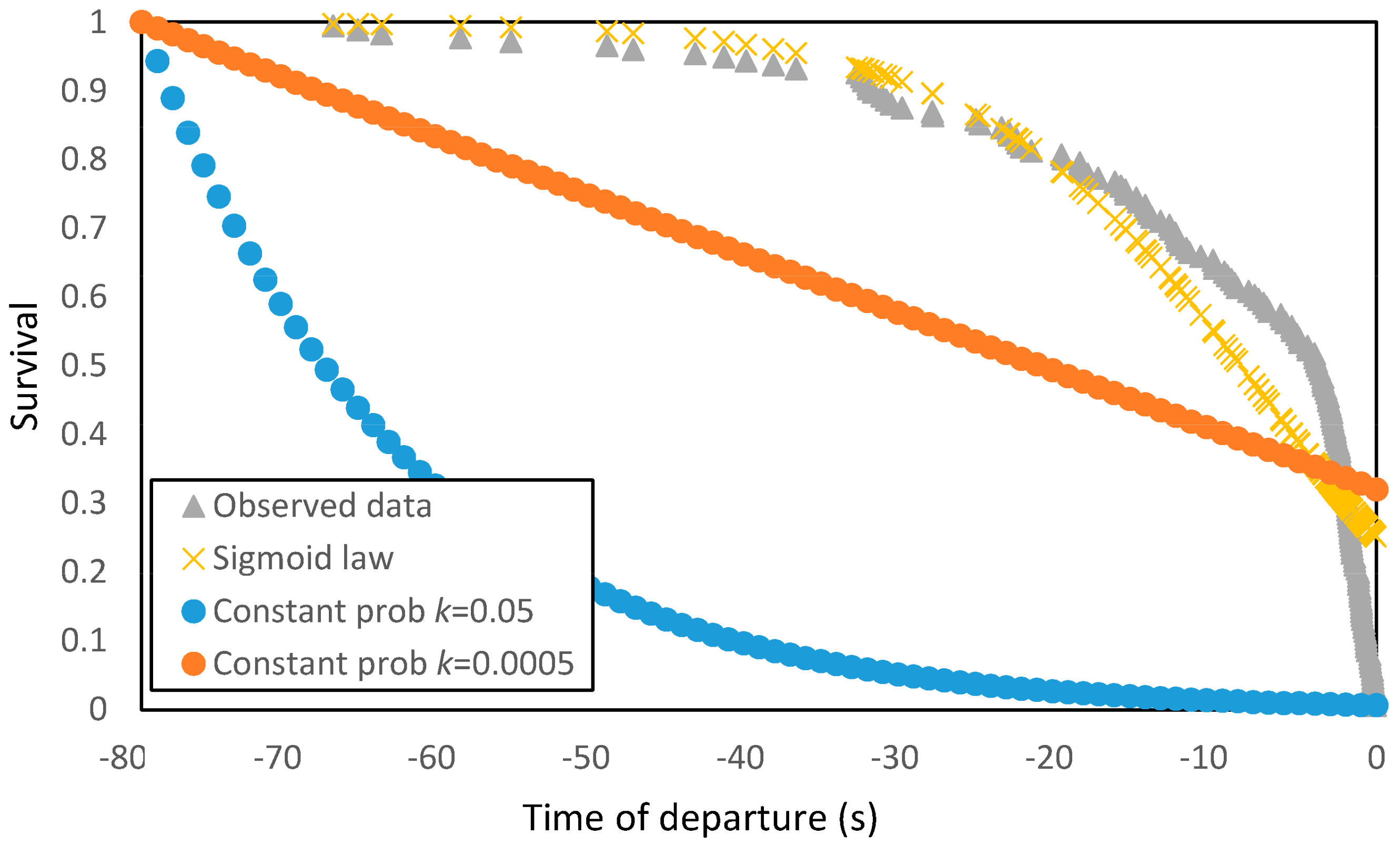
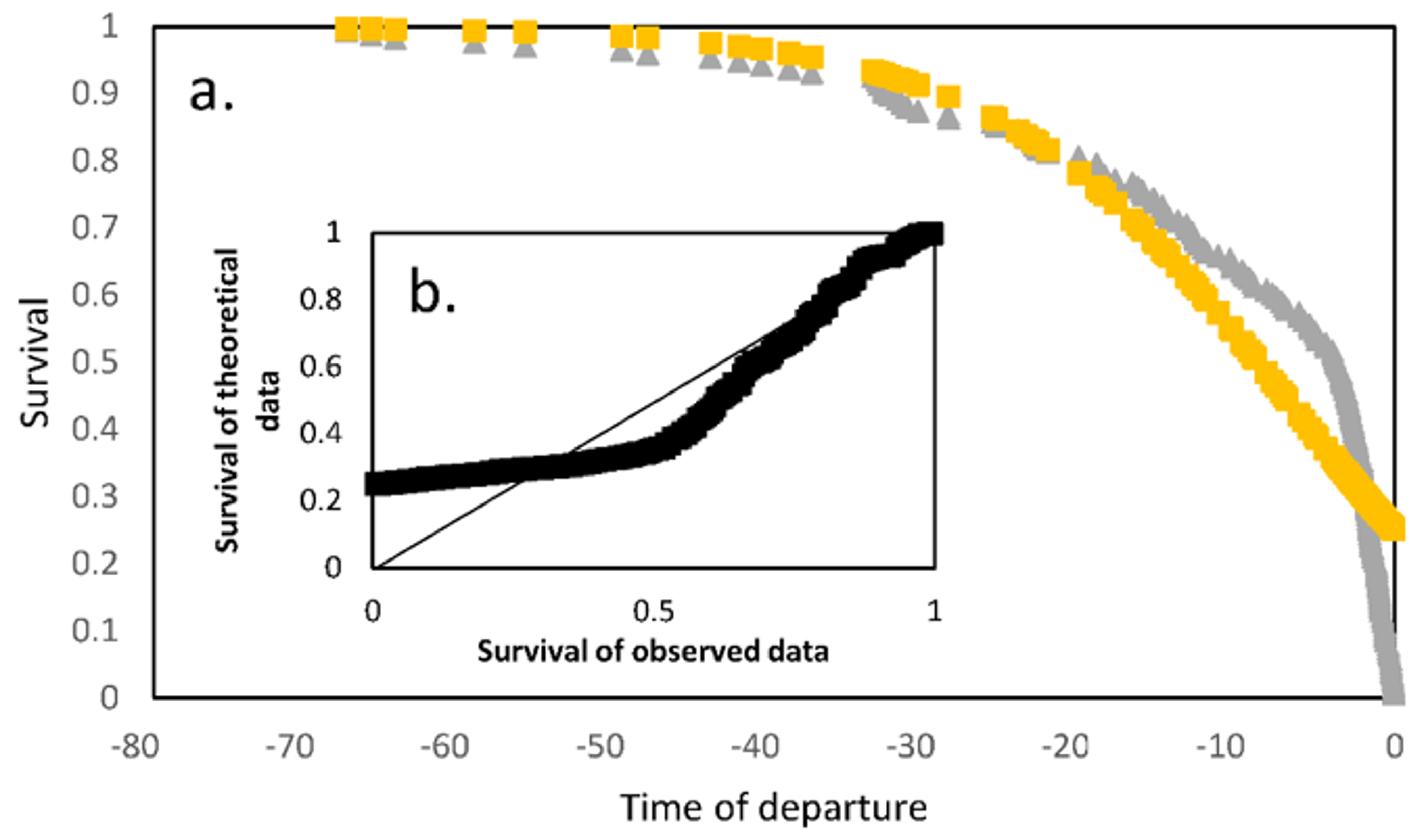
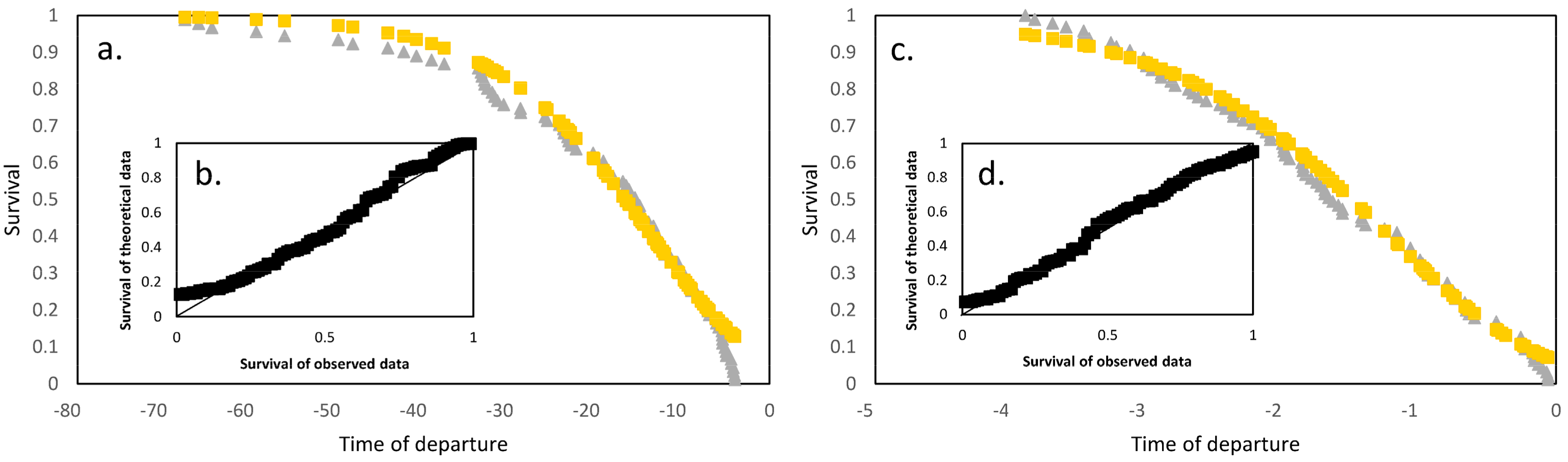
3.1. Analyses of Departure Times at the Red Signal
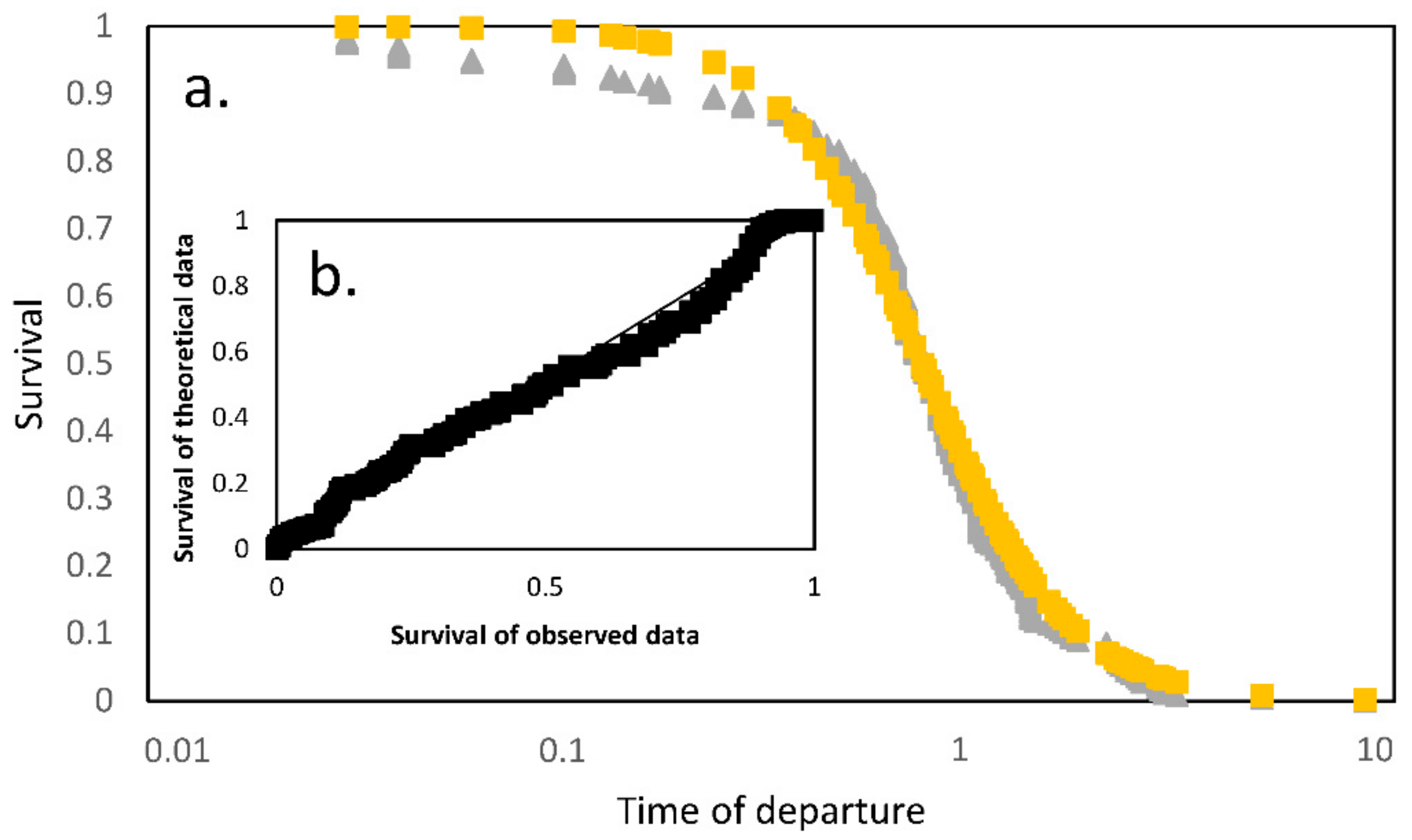
3.2. Analyses of Departure Times at the Green Signal
3.3. Effect of Country and Gender on the Time of Departure of the First Pedestrian
3.4. Effect of the Number of Lanes
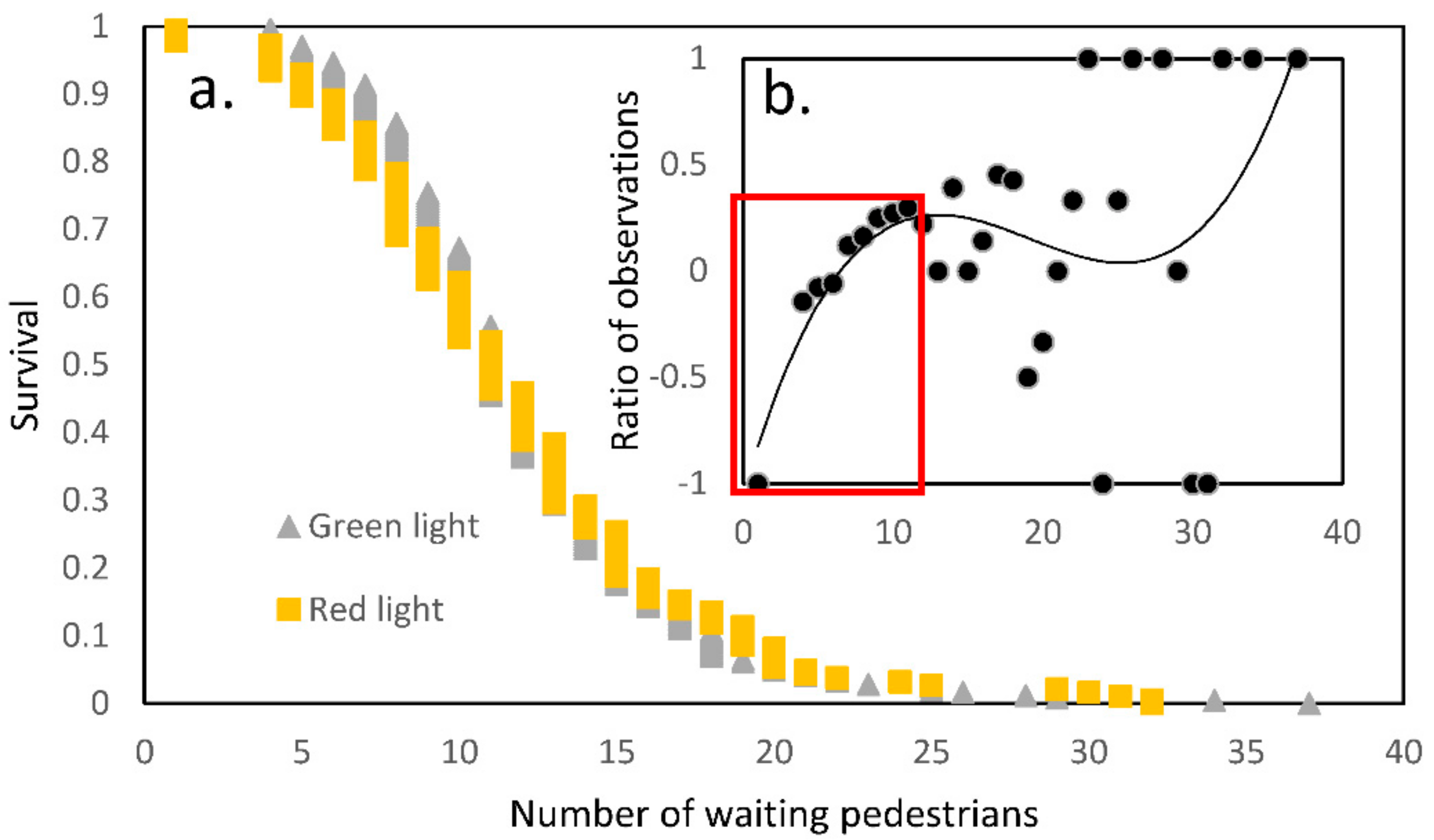
3.5. Effect of the Number of Waiting Pedestrians
3.6. Effect of Waiting Time
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- McNamara, J.M.; Houston, A.I. Integrating function and mechanism. Trends Ecol. Evol. 2009, 24, 670–675. [Google Scholar] [CrossRef] [PubMed]
- Pelé, M.; Sueur, C. Decision-making theories: Linking the disparate research areas of individual and collective cognition. Anim. Cogn. 2013, 16, 543–556. [Google Scholar] [CrossRef] [PubMed]
- Bogacz, R. Optimal decision-making theories: Linking neurobiology with behaviour. Trends Cogn. Sci. 2007, 11, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Marshall, J.A.R.; Bogacz, R.; Dornhaus, A.; Planqué, R.; Kovacs, T.; Franks, N.R. On optimal decision-making in brains and social insect colonies. J. R. Soc. Interface 2009, 6, 1065–1074. [Google Scholar] [CrossRef]
- Laude, J.R.; Stagner, J.P.; Zentall, T.R. Suboptimal choice by pigeons may result from the diminishing effect of nonreinforcement. J. Exp. Psychol. Anim. Learn. Cogn. 2014, 40, 12–21. [Google Scholar] [CrossRef][Green Version]
- Molet, M.; Miller, H.C.; Laude, J.R.; Kirk, C.; Manning, B.; Zentall, T.R. Decision making by humans in a behavioral task: Do humans, like pigeons, show suboptimal choice? Learn. Behav. 2012, 40, 439–447. [Google Scholar] [CrossRef]
- Beck, J.; Forstmeier, W. Superstition and belief as inevitable by-products of an adaptive learning strategy. Hum. Nat. 2007, 18, 35–46. [Google Scholar] [CrossRef]
- Cohen, L.J. Can human irrationality be experimentally demonstrated? Behav. Brain Sci. 1981, 4, 317–331. [Google Scholar] [CrossRef]
- Martino, B.D.; Kumaran, D.; Seymour, B.; Dolan, R.J. Frames, biases, and rational decision-making in the human brain. Science 2006, 313, 684–687. [Google Scholar] [CrossRef]
- Helbing, D.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef]
- Moussaïd, M.; Helbing, D.; Theraulaz, G. How simple rules determine pedestrian behavior and crowd disasters. Proc. Natl. Acad. Sci. USA 2011, 108, 6884–6888. [Google Scholar] [CrossRef] [PubMed]
- Aoyagi, S.; Hayashi, R.; Nagai, M. Modeling of Pedestrian Behavior in Crossing Urban Road for Risk Prediction Driving Assistance System; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Sueur, C.; Class, B.; Hamm, C.; Meyer, X.; Pelé, M. Different risk thresholds in pedestrian road crossing behaviour: A comparison of French and Japanese approaches. Accid. Anal. Prev. 2013, 58, 59–63. [Google Scholar] [CrossRef] [PubMed]
- Faralla, V.; Innocenti, A.; Venturini, E. Risk Taking and Social Exposure; Social Science Research Network: Rochester, NY, USA, 2013. [Google Scholar]
- Ferenchak, N.N. Pedestrian age and gender in relation to crossing behavior at midblock crossings in India. J. Traffic Transp. Eng. Engl. Ed. 2016, 3, 345–351. [Google Scholar] [CrossRef]
- Nagengast, A.J.; Braun, D.A.; Wolpert, D.M. Risk-sensitive optimal feedback control accounts for sensorimotor behavior under uncertainty. PLoS Comput. Biol. 2010, 6, e1000857. [Google Scholar] [CrossRef] [PubMed]
- Powell, M.; Ansic, D. Gender differences in risk behaviour in financial decision-making: An experimental analysis. J. Econ. Psychol. 1997, 18, 605–628. [Google Scholar] [CrossRef]
- Tse, D.K.; Lee, K.; Vertinsky, I.; Wehrung, D.A. Does culture matter? A cross-cultural study of executives’ choice, decisiveness, and risk adjustment in international marketing. J. Mark. 1988, 52, 81. [Google Scholar]
- Wilson, M.; Daly, M. Competitiveness, risk taking, and violence: The young male syndrome. Ethol. Sociobiol. 1985, 6, 59–73. [Google Scholar] [CrossRef]
- Pawar, D.S.; Patil, G.R. Pedestrian temporal and spatial gap acceptance at mid-block street crossing in developing world. J. Safety Res. 2015, 52, 39–46. [Google Scholar] [CrossRef]
- Yannis, G.; Papadimitriou, E.; Theofilatos, A. Pedestrian gap acceptance for mid-block street crossing. Transp. Plan. Technol. 2013, 36, 450–462. [Google Scholar] [CrossRef]
- Holland, C.; Hill, R. The effect of age, gender and driver status on pedestrians’ intentions to cross the road in risky situations. Accid. Anal. Prev. 2007, 39, 224–237. [Google Scholar] [CrossRef]
- Gorrini, A.; Crociani, L.; Vizzari, G.; Bandini, S. Observation results on pedestrian-vehicle interactions at non-signalized intersections towards simulation. Transp. Res. Part. F Traffic Psychol. Behav. 2018, 59, 269–285. [Google Scholar] [CrossRef]
- Gallup, A.C.; Hale, J.J.; Sumpter, D.J.; Garnier, S.; Kacelnik, A.; Krebs, J.R.; Couzin, I.D. Visual attention and the acquisition of information in human crowds. Proc. Natl. Acad. Sci. USA 2012, 109, 7245–7250. [Google Scholar] [CrossRef] [PubMed]
- Webster, M.M.; Ward, A.J.W. Personality and social context. Biol. Rev. 2011, 86, 759–773. [Google Scholar] [CrossRef] [PubMed]
- Faria, J.J.; Krause, S.; Krause, J. Collective behavior in road crossing pedestrians: The role of social information. Behav. Ecol. 2010, 21, 1236–1242. [Google Scholar] [CrossRef]
- Pelé, M.; Bellut, C.; Debergue, E.; Gauvin, C.; Jeanneret, A.; Leclere, T.; Nicolas, L.; Pontier, F.; Zausa, D.; Sueur, C. Cultural influence of social information use in pedestrian road-crossing behaviours. Open Sci. 2017, 4, 160739. [Google Scholar] [CrossRef] [PubMed]
- Cialdini, R.B.; Goldstein, N.J. Social influence: Compliance and conformity. Annu. Rev. Psychol. 2004, 55, 591–621. [Google Scholar] [CrossRef] [PubMed]
- Henrich, J.; Boyd, R. The evolution of conformist transmission and the emergence of between-group differences. Evol. Hum. Behav. 1998, 19, 215–241. [Google Scholar] [CrossRef]
- Rosenbloom, T. Crossing at a red light: Behaviour of individuals and groups. Transp. Res. Part. F Traffic Psychol. Behav. 2009, 12, 389–394. [Google Scholar] [CrossRef]
- Schmidt, S.; Färber, B. Pedestrians at the kerb—Recognising the action intentions of humans. Transp. Res. Part. F Traffic Psychol. Behav. 2009, 12, 300–310. [Google Scholar] [CrossRef]
- Kareem, A. Review of global menace of road accidents with special reference to Malaysia—A social perspective. Malays. J. Med. Sci. MJMS 2003, 10, 31. [Google Scholar]
- Zhuang, X.; Wu, C. Pedestrians’ crossing behaviors and safety at unmarked roadway in China. Accid. Anal. Prev. 2011, 43, 1927–1936. [Google Scholar] [CrossRef] [PubMed]
- Papadimitriou, E.; Theofilatos, A.; Yannis, G. Patterns of pedestrian attitudes, perceptions and behaviour in Europe. Saf. Sci. 2013, 53, 114–122. [Google Scholar] [CrossRef]
- Pucher, J.; Dijkstra, L. Promoting safe walking and cycling to improve public health: Lessons from the Netherlands and Germany. Am. J. Public Health 2003, 93, 1509–1516. [Google Scholar] [CrossRef] [PubMed]
- Czaczkes, T.J.; Czaczkes, B.; Iglhaut, C.; Heinze, J. Composite collective decision-making. Proc. R Soc. B 2015, 282, 20142723. [Google Scholar] [CrossRef] [PubMed]
- Dyer, J.R.G.; Johansson, A.; Helbing, D.; Couzin, I.D.; Krause, J. Leadership, consensus decision making and collective behaviour in humans. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 781–789. [Google Scholar] [CrossRef]
- Kurvers, R.H.J.M.; Wolf, M.; Naguib, M.; Krause, J. Self-organized flexible leadership promotes collective intelligence in human groups. Open Sci. 2015, 2, 150222. [Google Scholar] [CrossRef]
- Fleming, T.R.; Harrington, D.P. Counting Processes and Survival Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 978-1-118-15066-5. [Google Scholar]
- Klein, J.P.; Goel, P.K. Survival Analysis: State of the Art; Springer: Berlin, Germany, 1992; ISBN 978-0-7923-1634-3. [Google Scholar]
- Miller, R.G.; Gong, G.; Muñoz, A. Survival Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1981. [Google Scholar]
- Robinson, E.J.H.; Franks, N.R.; Ellis, S.; Okuda, S.; Marshall, J.A.R. A simple threshold rule is sufficient to explain sophisticated collective decision-making. PLoS ONE 2011, 6, e19981. [Google Scholar] [CrossRef] [PubMed]
- Sumpter, D.J.T.; Pratt, S.C. Quorum responses and consensus decision making. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 743–753. [Google Scholar] [CrossRef]
- Tiwari, G.; Bangdiwala, S.; Saraswat, A.; Gaurav, S. Survival analysis: Pedestrian risk exposure at signalized intersections. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 77–89. [Google Scholar] [CrossRef]
- Sueur, C.; Deneubourg, J.-L. Self-organization in primates: Understanding the rules underlying collective movements. Int. J. Primatol. 2011, 32, 1413–1432. [Google Scholar] [CrossRef]
- Sueur, C.; Pelé, M. Risk should be objectively defined: Reply to Zentall and Smith. Anim. Cogn. 2015, 18, 981–983. [Google Scholar] [CrossRef] [PubMed]
- Benedict, R. The Chrysanthemum and the Sword: Patterns of Japanese Culture; Houghton Mifflin Harcourt: Boston, MA, USA, 2005; ISBN 978-0-618-61959-7. [Google Scholar]
- Fernandez, A.A.; Deneubourg, J.L. On following behaviour as a mechanism for collective movement. J. Theor. Biol. 2011, 284, 7–15. [Google Scholar] [CrossRef] [PubMed]
- King, A.J.; Cowlishaw, G. Leaders, followers and group decision-making. Integr. Commun. Biol. 2009, 2, 147–150. [Google Scholar] [CrossRef] [PubMed]
- Van Vugt, M.; Hogan, R.; Kaiser, R.B. Leadership, followership, and evolution: Some lessons from the past. Am. Psychol. 2008, 63, 182–196. [Google Scholar] [CrossRef]
- Guo, H.; Wang, W.; Guo, W.; Jiang, X.; Bubb, H. Reliability analysis of pedestrian safety crossing in urban traffic environment. Saf. Sci. 2012, 50, 968–973. [Google Scholar] [CrossRef]
- Osman, L.M. Conformity or compliance? A study of sex differences in pedestrian behaviour. Br. J. Soc. Psychol. 1982, 21, 19–21. [Google Scholar] [CrossRef]
- Zhou, R.; Horrey, W.J.; Yu, R. The effect of conformity tendency on pedestrians’ road-crossing intentions in China: An application of the theory of planned behavior. Accid. Anal. Prev. 2009, 41, 491–497. [Google Scholar] [CrossRef]
- Brosseau, M.; Zangenehpour, S.; Saunier, N.; Miranda-Moreno, L. The impact of waiting time and other factors on dangerous pedestrian crossings and violations at signalized intersections: A case study in Montreal. Transp. Res. Part F Traffic Psychol. Behav. 2013, 21, 159–172. [Google Scholar] [CrossRef]
- Dommes, A.; Granié, M.-A.; Cloutier, M.-S.; Coquelet, C.; Huguenin-Richard, F. Red light violations by adult pedestrians and other safety-related behaviors at signalized crosswalks. Accid. Anal. Prev. 2015, 80, 67–75. [Google Scholar] [CrossRef]
- Sueur, C.; Petit, O.; Deneubourg, J. Selective mimetism at departure in collective movements of Macaca tonkeana: An experimental and theoretical approach. Anim. Behav. 2009, 78, 1087–1095. [Google Scholar] [CrossRef]
- Guitart-Masip, M.; Duzel, E.; Dolan, R.; Dayan, P. Action versus valence in decision making. Trends Cogn. Sci. 2014, 18, 194–202. [Google Scholar] [CrossRef]
- Kahnt, T.; Grueschow, M.; Speck, O.; Haynes, J.-D. Perceptual learning and decision-making in human medial frontal cortex. Neuron 2011, 70, 549–559. [Google Scholar] [CrossRef] [PubMed]
- Kanakia, A.; Klingner, J.; Correll, N.A.; Klingner, J.; Correll, N. A response threshold sigmoid function model for swarm robot collaboration. In Distributed Autonomous Robotic Systems; Springer: Berlin, Germany, 2016; pp. 193–206. [Google Scholar]
- Lempert, R.J.; Collins, M.T. Managing the Risk of Uncertain Threshold Responses: Comparison of Robust, Optimum, and Precautionary Approaches. Risk Anal. 2007, 27, 1009–1026. [Google Scholar] [CrossRef]
- Philiastides, M.G.; Sajda, P. Temporal characterization of the neural correlates of perceptual decision making in the human brain. Cereb. Cortex 2006, 16, 509–518. [Google Scholar] [CrossRef] [PubMed]
- Sueur, C.; Deneubourg, J.-L.; Petit, O. Sequence of quorums during collective decision making in macaques. Behav. Ecol. Sociobiol. 2010, 64, 1875–1885. [Google Scholar] [CrossRef]
- Nicolis, G.; Prigogine, I. Exploring Complexity: An Introduction; W.H. Freeman: New York, NY, USA, 1989; ISBN 0-7167-1859-6. [Google Scholar]
- Sueur, C.; Perony, N.; Amblard, F.; Guillaume, J.-L. Modélisation des réseaux sociaux. In Analyse des Réseaux Sociaux Appliquée à l’Ethologie et à l’Ecologie; Editions Matériologiques: Paris, France, 2015; pp. 423–444. [Google Scholar]
- Todd, P.M.; Gigerenzer, G. Précis of simple heuristics that make us smart. Behav. Brain Sci. 2000, 23, 727–741. [Google Scholar] [CrossRef]
- García, L.V. Escaping the Bonferroni iron claw in ecological studies. Oikos 2004, 105, 657–663. [Google Scholar] [CrossRef]
- Holm, S. A Simple sequentially rejective multiple test procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar]
- Gårder, P. Pedestrian safety at traffic signals: A study carried out with the help of a traffic conflicts technique. Accid. Anal. Prev. 1989, 21, 435–444. [Google Scholar] [CrossRef]
- Lachapelle, U.; Cloutier, M.-S. On the complexity of finishing a crossing on time: Elderly pedestrians, timing and cycling infrastructure. Transp. Res. Part Policy Pract. 2017, 96, 54–63. [Google Scholar] [CrossRef]
- Amé, J.-M.; Halloy, J.; Rivault, C.; Detrain, C.; Deneubourg, J.L. Collegial decision making based on social amplification leads to optimal group formation. Proc. Natl. Acad. Sci. USA 2006, 103, 5835–5840. [Google Scholar] [CrossRef] [PubMed]
- Green, L.; Myerson, J. Exponential versus hyperbolic discounting of delayed outcomes: Risk and waiting time. Am. Zool. 1996, 36, 496–505. [Google Scholar] [CrossRef]
- Story, G.W.; Vlaev, I.; Seymour, B.; Darzi, A.; Dolan, R.J. Does temporal discounting explain unhealthy behavior? A systematic review and reinforcement learning perspective. Front. Behav. Neurosci. 2014, 8, 76. [Google Scholar] [CrossRef] [PubMed]
- Iosa, M.; Fusco, A.; Morone, G.; Paolucci, S. Development and decline of upright gait stability. Front. Aging Neurosci. 2014, 6, 14. [Google Scholar] [CrossRef][Green Version]
- Yaffe, K.; Barnes, D.; Nevitt, M.; Lui, L.-Y.; Covinsky, K. A Prospective study of physical activity and cognitive decline in elderly women: Women who walk. Arch. Intern. Med. 2001, 161, 1703–1708. [Google Scholar] [CrossRef] [PubMed]
- Gould, J.P. Risk, stochastic preference, and the value of information. J. Econ. Theory 1974, 8, 64–84. [Google Scholar] [CrossRef]
- Mihet, R. Effects of Culture on Firm Risk-Taking: A Cross-Country and Cross-Industry Analysis; International Monetary Fund: Washington, DC, USA, 2012. [Google Scholar]
- Zuberbühler, K. Audience effects. Curr. Biol. 2008, 18, R189–R190. [Google Scholar] [CrossRef]
- Bateson, M.; Nettle, D.; Roberts, G. Cues of being watched enhance cooperation in a real-world setting. Biol. Lett. 2006, 2, 412–414. [Google Scholar] [CrossRef]
- Köll, H.; Bader, M.; Axhausen, K.W. Driver behaviour during flashing green before amber: A comparative study. Accid. Anal. Prev. 2004, 36, 273–280. [Google Scholar] [CrossRef]
- Keegan, O.; O’Mahony, M. Modifying pedestrian behaviour. Transp. Res. Part A Policy Pract. 2003, 37, 889–901. [Google Scholar] [CrossRef]
- Lipovac, K.; Vujanic, M.; Maric, B.; Nesic, M. The influence of a pedestrian countdown display on pedestrian behavior at signalized pedestrian crossings. Transp. Res. Part F Traffic Psychol. Behav. 2013, 20, 121–134. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| France-Strasbourg | ||||
| Sites | Train Station | Pont des Corbeaux | Place Broglie | |
| Coordinates | 48.584474, 7.736135 | 48.579509, 7.750745 | 48.584559, 7.748628 | |
| Lanes | 2 * 1 | 2 * 2 | 2 * 1 | |
| Mean pedestrian flow per hour | 667 | 612 | 850 | |
| Mean road crossing speed (m.s−1) | 0.96 ± 0.05 | 1.11 ± 0.29 | 1.01 ± 0.16 | |
| Dates of scoring | 2–7 July 2014 | 1–25 October 2014 | 15 February–9 March 2015 | |
| Japan-Nagoya | ||||
| Sites | Train Station | Maruei | Excelco | Osu-Kannon |
| Coordinates | 35.170824, 136.884328 | 35.168638, 136.905740 | 35.166891, 136.907284 | 35.159316, 136.901697 |
| Lanes | 2 * 3 | 1 * 1 | 2 * 1 | 2 * 1 |
| Mean pedestrian flow per hour | 480 | 645 | 869 | 814 |
| Mean road crossing speed (m.s−1) | 1.10 ± 0.22 | 1.15 ± 0.21 | 0.98 ± 0.21 | 1.07 ± 0.18 |
| Dates of scoring | 13 June–5 July 2011 | 27 January–5 February 2015 | ||
| France-Man | France-Woman | Japan-Man | Japan-Woman | ||
|---|---|---|---|---|---|
| Red light (up to 4 s) | Threshold S | −8 s | −5.7 s | Non-applicable due to small dataset (two points per condition) | |
| Sensitivity q | 2.86 | 5.56 | |||
| R² | 0.98 | 0.98 | |||
| F | 1882 | 2242 | |||
| Light still red, but change approaching (between 4 and 0 s) | Threshold S | −2.3 s | −1 s | −0.6 s | −0.6 s |
| Sensitivity q | 2.5 | 2.2 | 2 | 2 | |
| R² | 0.99 | 0.97 | 0.98 | 0.98 | |
| F | 3196 | 571 | 1656 | 734 | |
| Green light | Threshold S | 0.8 s | 0.9 s | 0.7 s | 0.7 s |
| Sensitivity q | 2.5 | 3 | 3 | 3.5 | |
| R² | 0.99 | 0.99 | 0.98 | 0.99 | |
| F | 1727 | 1319 | 6902 | 14,890 | |
| Country | Number of Lanes | Equation (y = a * e−bx) | Log Gradient −(1/b) | R² | F |
|---|---|---|---|---|---|
| France | 2 | y = 0.954 * e−0.0006x | −1666.67 | 0.99 | 8032 |
| Japan | 2 | y = 0.9 * e−0.009x | −1000 | 0.82 | 67 |
| France | 4 | y = 1.0012 * e−0.003x | −333.33 | 0.99 | 3128 |
| Japan | 4 | y = 1.340 * e−0.007x | −142.86 | 0.90 | 269 |
| Country | Gender | Equation (y = a * e−bx) | Log Gradient (1/b) | R² | F |
|---|---|---|---|---|---|
| France | Man | y = 0.852 * e−0.0008x | 1250 | 0.98 | 3663 |
| Japan | Man | y = 1.143 * e−0.0003x | 3333.3 | 0.96 | 620 |
| France | Woman | y = 0.942 * e−0.0006x | 1666.7 | 0.99 | 5556 |
| Japan | Woman | y = 1.048 * e−0.0003x | 3333.3 | 0.94 | 220 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pelé, M.; Deneubourg, J.-L.; Sueur, C. Decision-Making Processes Underlying Pedestrian Behaviors at Signalized Crossing: Part 1. The First to Step off the Kerb. Safety 2019, 5, 79. https://doi.org/10.3390/safety5040079
Pelé M, Deneubourg J-L, Sueur C. Decision-Making Processes Underlying Pedestrian Behaviors at Signalized Crossing: Part 1. The First to Step off the Kerb. Safety. 2019; 5(4):79. https://doi.org/10.3390/safety5040079
Chicago/Turabian StylePelé, Marie, Jean-Louis Deneubourg, and Cédric Sueur. 2019. "Decision-Making Processes Underlying Pedestrian Behaviors at Signalized Crossing: Part 1. The First to Step off the Kerb" Safety 5, no. 4: 79. https://doi.org/10.3390/safety5040079
APA StylePelé, M., Deneubourg, J.-L., & Sueur, C. (2019). Decision-Making Processes Underlying Pedestrian Behaviors at Signalized Crossing: Part 1. The First to Step off the Kerb. Safety, 5(4), 79. https://doi.org/10.3390/safety5040079