1. Introduction
Cycling is an environmentally friendly, healthy, and affordable mode of transport that is viable for short distance trips within city centers, promoting sustainable mobility [
1]. However, despite the indisputable benefits, including but not limited to fuel savings, emission reductions, less traffic congestion, and so on [
2], bike users are exposed to high risks of crash injuries and fatalities [
3], especially in densely populated areas [
4]. Automated vehicles (AVs) are expected to improve road safety [
5], since human error is a major cause of road crashes [
6]. However, their anticipated benefits are primarily untested and contain a great deal of speculation as new risks (e.g., vehicles’ system failure and cyber security issues [
7]) and new types of crashes may appear from this disruptive paradigm shift.
In practice, three different types of cycling facilities can be identified: (i) cycle paths, which are designated for use by cyclists and pedestrians and are apart from public roads; (ii) cycle tracks, which are exclusive for cyclists, adjacent to roads but physically separated from motorized traffic and distinct from the sidewalks; and (iii) cycle lanes, which are on-road located lanes indicated by markings and are the most common facilities for cycling in dense urban environments [
8]. The latter is usually the less attractive in terms of perceived safety since it implies a direct interaction with other motorized vehicles [
9]. Various studies have also shown that the majority of cyclist crashes occur in urban areas, frequently on marked on-road cycle lanes [
10,
11], showing that the type of cycling facility can impact the risk and severity of injuries [
12].
Automated vehicles bring the opportunity to reshape urban areas and transform urban planning. However, sharing the roads between different types of vehicles (i.e., AVs, human-driven vehicles, etc.) and other users will create different demands on road infrastructure. For instance, a road lane width is generally between 2.7 to 3.6 m (9–12 ft.) depending on the type of roadway [
13], although it is common that road networks in city centers consist of even narrower streets. Automated vehicles will allow narrower traffic lanes to be used [
14,
15] enabling the extra space to be devoted to an enhanced cycling infrastructure. However, the concept of narrower lanes would be difficult to be applied where the traffic is also expected to consist of human-driven vehicles, due to safety reasons. Towards that direction, city centers and congestion charging zones have been identified as potential entire autonomy-enabled areas for AVs in highly-populated areas [
15,
16]. Finally, reduced on-street parking requirements and higher off-street capacity for AVs [
17,
18] could allow the design of ‘parking-free zones’ providing more space for pedestrians and cyclists.
Existing research has mainly focused on traffic performance and safety gains of the new technology without taking into account vulnerable road users (VRUs) (i.e., cyclists and pedestrians). To address the aforementioned gaps in relation to cyclists’ safety in urban areas for AVs, a hypothetical scenario was examined in a real world road network with high volumes of cyclists and cars. This is used as a step up to fill the current knowledge gaps on potential indirect benefits or risks of AVs on cyclists. Since their implementation is still in its first steps and apposite study cases to conduct a before-after observational study are not available, the microscopic traffic flow simulation software PTV Vissim 11 [
19] was utilized to carry out the simulation experiments, combined with the surrogate safety assessment model v.3 (SSAM) [
20] to evaluate the safety implications. The software PTV Vissim was chosen as it can represent cyclists’ behavior and their interactions with other vehicles very accurately [
21,
22]. The SSAM is used to predict and analyze the trends in traffic safety for the conditions and network under study. Traditional road safety assessment methodologies are mainly based on the analysis of historical crash data, which is usually available in limited quantity and low quality [
23]. The SSAM can estimate potential conflicts by processing vehicle trajectories that can be obtained from traffic micro-simulation software such as PTV Vissim. The following section describes the techniques we adopted to quantify the impact of AVs on cyclist’s safety.
2. Materials and Methods
2.1. Case Study
A part of the city center of Hasselt, Belgium was chosen as our case study. Hasselt is a medium-sized city and its center is characterized by narrow one-lane streets that are shared by cyclists and cars. Due to its size, the flat terrain, and an extensive cycle network that runs throughout the city, cycling is a popular mode of transport among its citizens. The area studied, as it was designed in PTV Vissim, consisted of 5 links and 2 uncontrolled intersections (
Figure 1). The characteristics of each link are shown in
Table 1.
2.2. Simulation of Cyclists
In order to capture cyclists’ behavior as accurately as possible and to ensure realistic results, the project “Microsimulation of Cyclists in Peak Hour Traffic” developed by COWI [
24] was used as a reference combined with data collected in a local context. The first step was to identify the model parameters, which are important for the simulation, and to make the necessary adjustments. The following parameters related to simulation of cyclists were identified:
The primary source of data to configure the aforementioned parameters was visual inspections and manual counting during peak hours. Speed data of cyclists was collected under free flow conditions and good weather. The results of each parameter have been validated by comparing the results of the calibration process to the data collected. During the site inspections, it was noticed that cyclists adopt different following and lateral behavior based on the other counterpart type (i.e., car or bicycle) that they interact with. Therefore, it was crucial to capture the behavioral variation.
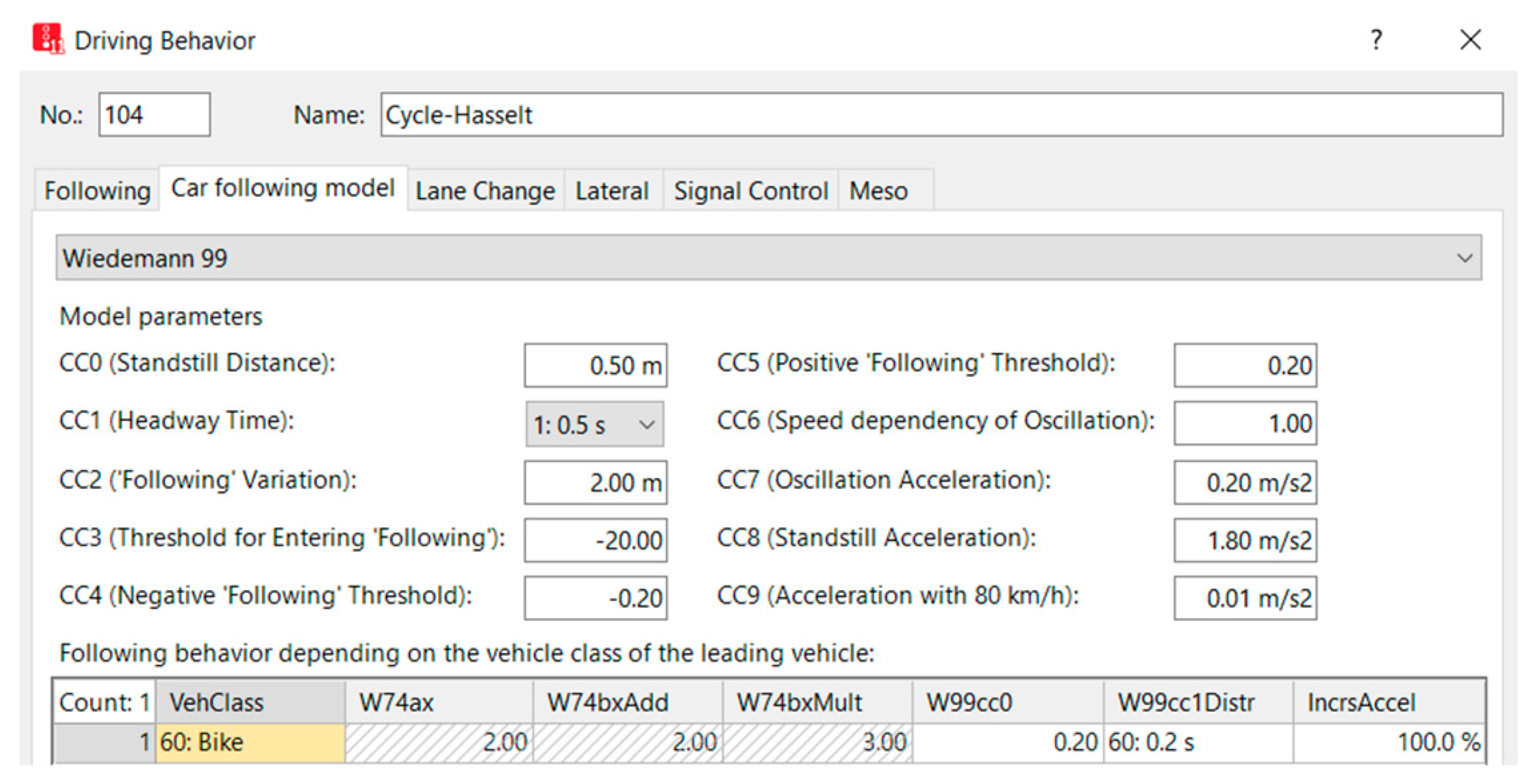
The PTV Vissim incorporates two different car following models: (i) Wiedemann 74; and (ii) Wiedemann 99. To better represent how cyclists interact longitudinally within the road lane, the latter was chosen as it features more adjustable parameters. Consequently, an assessment analysis was conducted for each parameter to define its relevance to cyclists and its new value based on the field observations (
Figure 2).
“Standstill Distance” (CC0) and “Headway Time” (CC1) are essential to ensure correct distance between vehicles. It was found that cyclists tend to keep less distance when the vehicle class of the leading vehicle is a bike compared to a car. Therefore, smaller values were assigned to parameter CCO and CC1 for bikes. To ensure that cyclists adopt more cautious behavior in the road environment as they have to interact directly with road vehicles, parameters CC2 to CC6 were adjusted accordingly as they were assessed as unrealistic with the default values (e.g., the “Following Variation” (CC2) was 0 and the “Threshold for Entering Following” (CC3) was actually the same value for cars). Moreover, threshold parameters (i.e., CC4 and CC5) were reduced, since smaller values result in a more sensitive reaction to the preceding vehicle maneuvers.
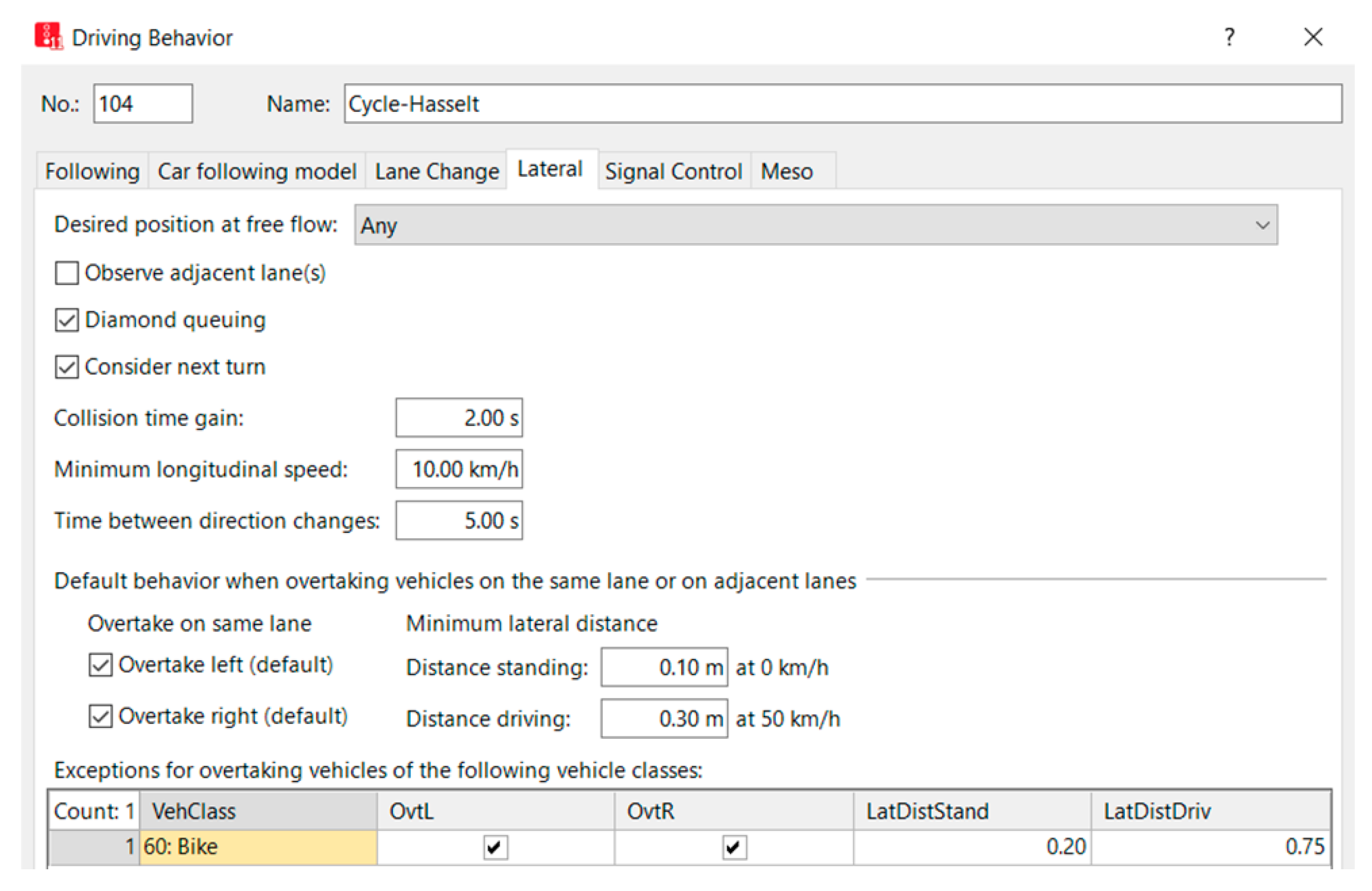
The parameters that define overtaking behavior were crucial for the simulation of the cyclists in this study. Cars and cyclists share the same lane and it is important to reflect the impact of the lane width on each link appropriately. After visual inspections, the necessary changes in the lateral parameters were implemented. The “Desired position at free flow” was changed from “Right” to “Any” and “Consider next turn” was also selected to prevent overtaking behaviors that may lead to conflicts in the upcoming turn. The “Collision time again” parameter controls the changes in the lateral position of a vehicle in a lane. An increased value will lead to fewer instances of overtaking that could be potentially applied for bike lanes but not for shared roads, as it was observed that cyclists overtook preceding slower vehicles when it was possible. The “Minimum Lateral Distance” defines the minimum required distance for vehicles passing each other within the same lane at different speed values. Different values were also assigned here based on the leading vehicle. It was noticed that cyclists tend to keep more distance when they overtake another bicycle compared to a car due to the available space. After adapting these parameters, it was important to ensure that no cyclists in the model could overtake another cyclist or car at the same time, as it would not represent a realistic situation. The lateral parameter settings are shown in
Figure 3.
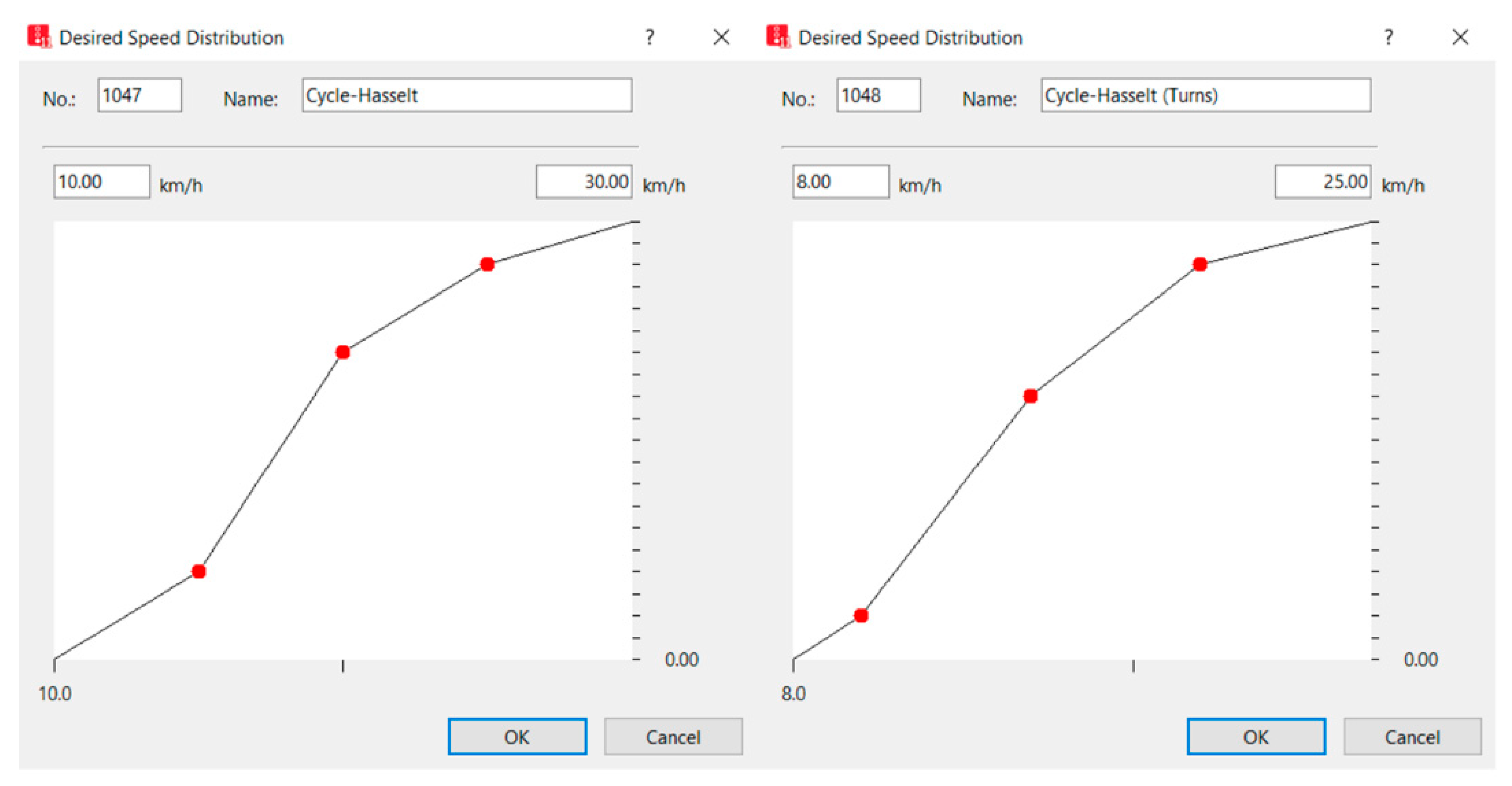
Based on the data collected, new “Desired Speed Distribution” profiles were generated for cyclists for normal routes, but also for turns (
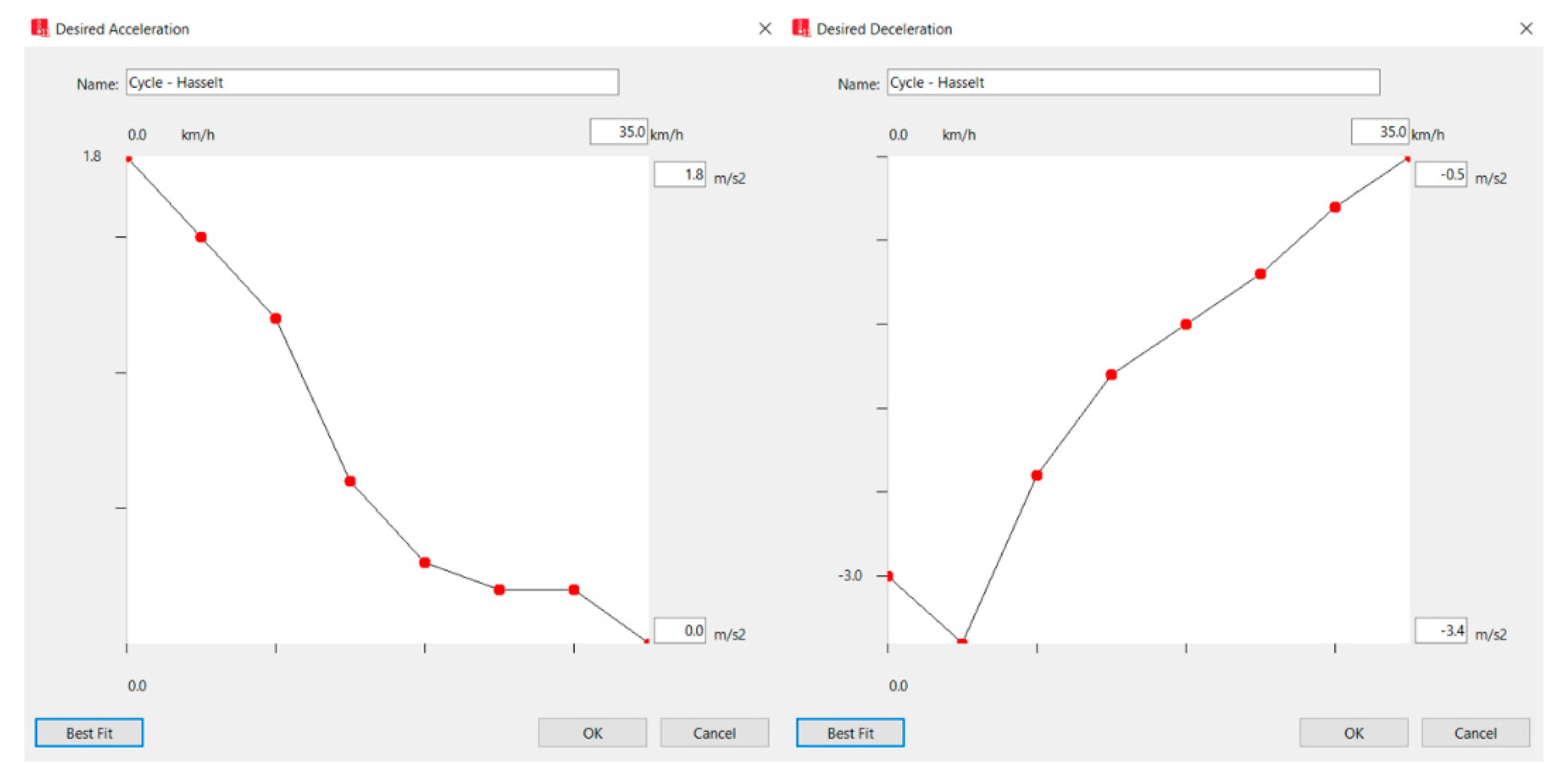
Figure 4), as the spread of the default distributions were found to be smaller than what it was observed in the field. Regarding the acceleration distributions, they were found to have large values in the software default measures compared to the ones that were obtained from the field data. Therefore, new distributions were also implemented in the model for acceleration/deceleration (
Figure 5).
It should be noted that while studies have identified the importance of factors such as the torso and spine in the capabilities and performance of the human body [
25,
26], it is not possible to model them in the context of traffic micro-simulation.
2.3. Simulation of Cars
For the simulation of the human-driven vehicles, the following parameter categories were selected for calibration:
Following parameters
Speed distributions
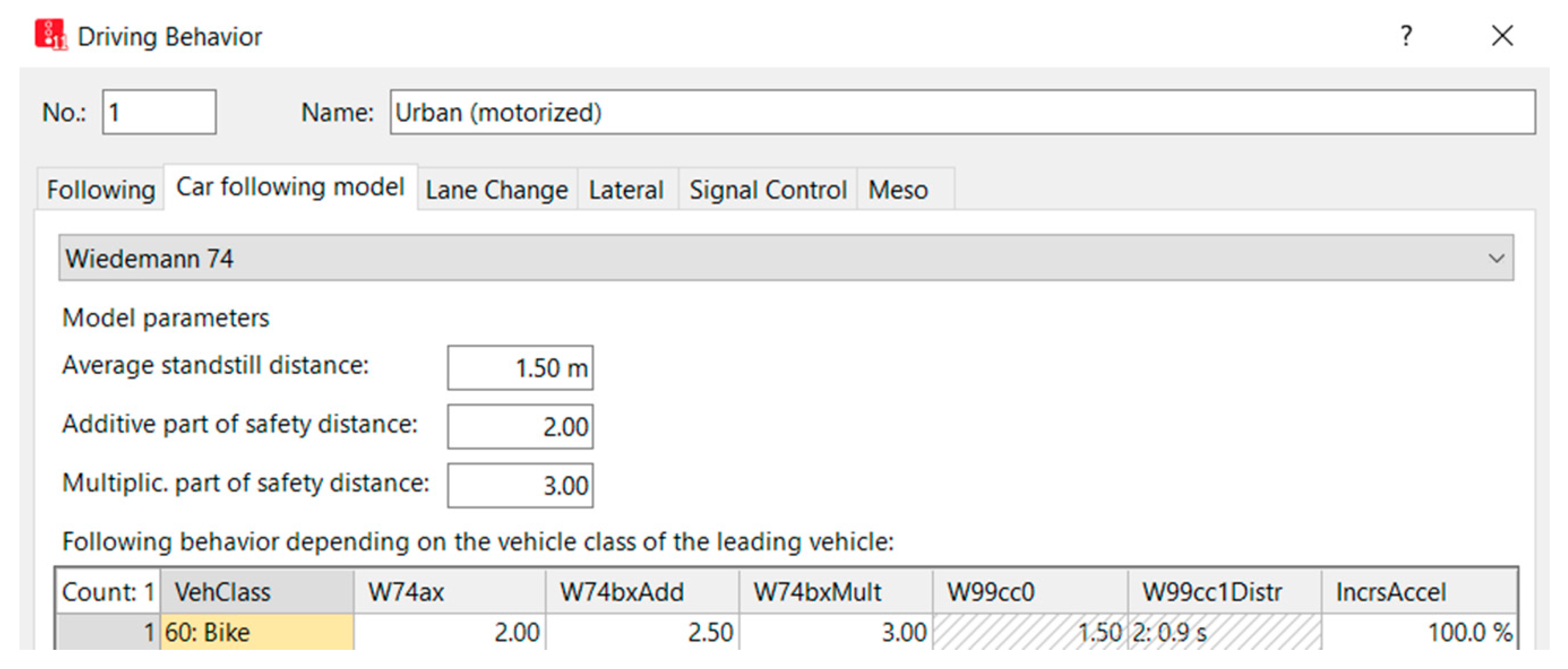
The Wiedemann 74 car following model was adopted in this case as it is the most commonly used model in urban environments. The model has only three adjustable parameters: “Average standstill distance”, “Additive part of safety distance” and, “Multiplic. Part of safety distance”. The desired safe distance is the sum of the first two, while the last defines its distribution. During the observations, it was found that cars keep longer standstill and following distances when the leading vehicle was a bike compared to another car. Therefore, it was necessary to capture the different behaviors. The new estimated values are presented in
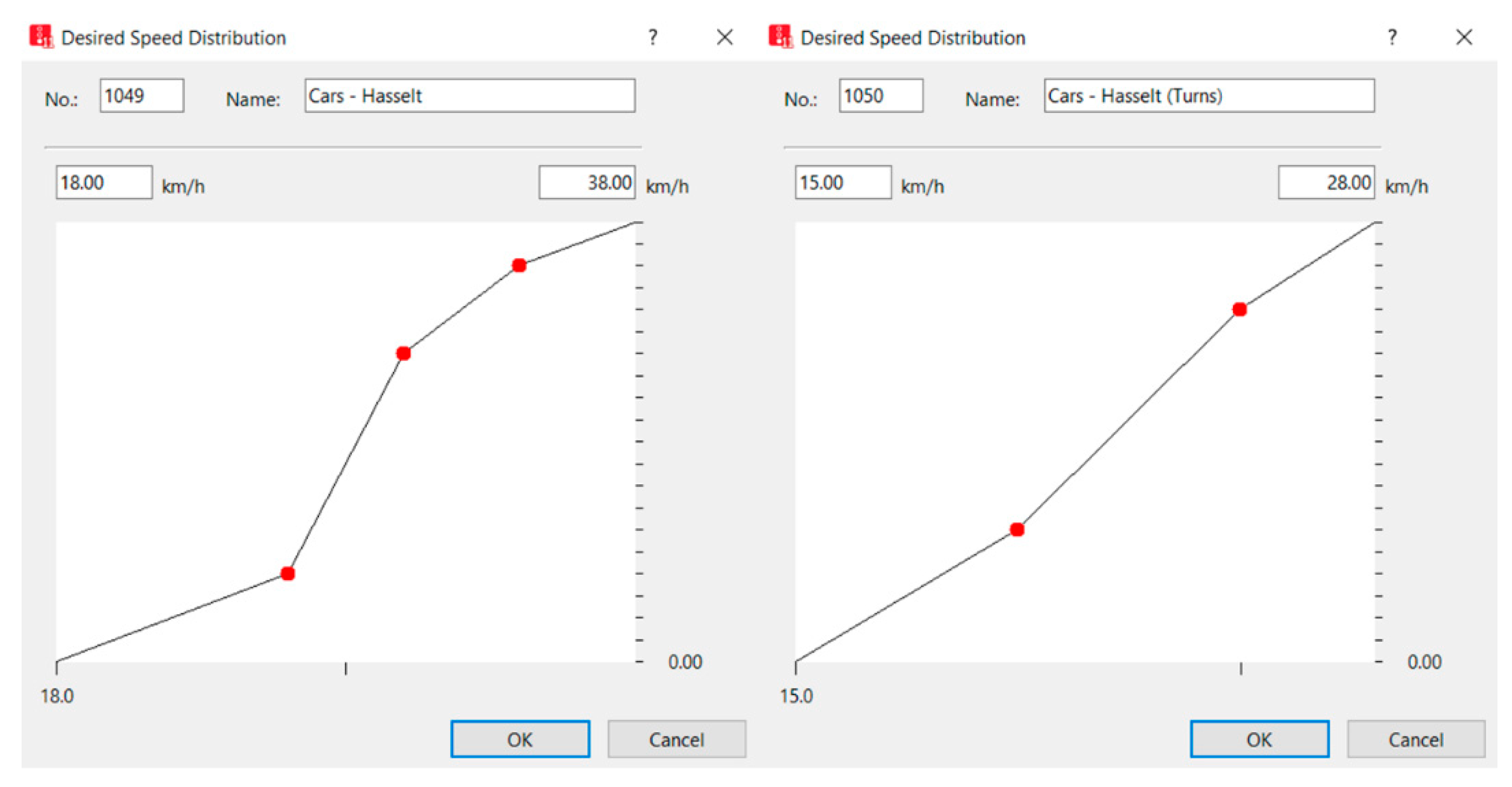
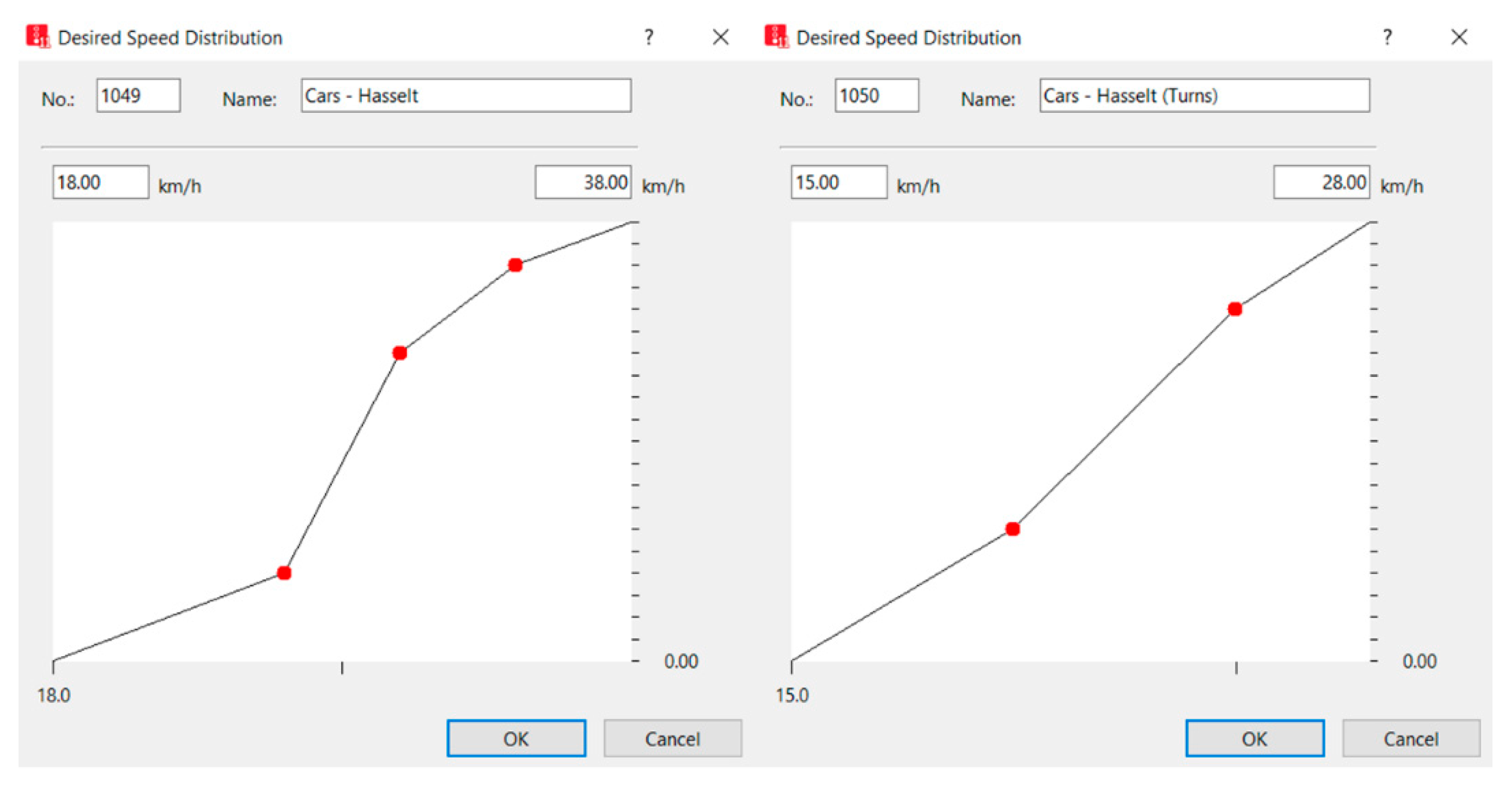
Figure 6. Based on the data collected, new “Desired Speed Distribution” was also added for cars in normal routes and turns (
Figure 7).
2.4. Scenarios Implementation
In order to investigate whether AVs can improve cyclists’ safety in urban areas, two different scenarios were examined. In the first scenario, the current situation was evaluated (i.e., only human-driven vehicles and cyclists in traffic streams). In the second scenario, the road network studied was considered as part of an entire-autonomy enabled zone [
15,
16] where only AVs will be allowed and therefore, a 100% penetration rate was assumed. The main objective of simulating these two situations was to estimate the impact of AVs on road safety, in terms of both number and severity level of conflicts.
Traffic modeling and simulation is widely used to help explore the impact of automated driving in transport networks [
27,
28,
29]. The PTV Vissim, in its last version, includes 3 different driving behaviors models for AVs based on real world data: (i) AV cautious; (ii) AV normal; and (iii) AV aggressive. Each of these categories describes a different driving logic. For this work and by taking into account the characteristics of the case under study (i.e., urban area, shared infrastructure between cars and cyclists, unsignalized intersections), the first driving behavior was adopted. In that mode, the vehicle observes the road environment and always adopts a safe behavior maintaining large gaps.
Finally, based on the report “Micro-Simulation Guide for Automated Vehicles” [
30] and in order to define a deterministic behavior of AVs, the spread values of acceleration and deceleration were set to be equal to the default measures, while the speed distributions were defined as shown in
Figure 8. This is because AVs are expected to keep to the speed limits (i.e., 30 km/h for the specific study area) and have lower speed variation compared to human-driven vehicles. Regarding turns, it was assumed that for safety reasons, especially on uncontrolled intersections, and in order to maximize the comfort of passengers, AVs will reduce their speed while turning. Hence, a reduction of 5 km/h was assumed.
Except for the parameters described above, PTV Vissim’s default values for all simulation parameters were used. Simulations correspond to a high traffic flow scenario (peak hour) representing usual traffic conditions of the studied area. For each simulation run a 15-min ‘warm-up’ period prior to the analysis was foreseen to fill up the network (vehicles do not spend more than 10 min crossing the area). The final results of each scenario are the average values of 10 model runs with different random seeds to obtain greater variability in the results [
31].
The vehicle trajectory files of these runs were used for conflict analysis using SSAM. The SSAM tool can determine whether or not an interaction can be considered as conflict based on predefined thresholds. The software is able to calculate the number, location and severity of conflicts that occurred in a micro-simulation model using the following surrogate safety measures: time-to-collision (TTC) and post-encroachment-time (PET). For this work, since the analysis took place in an urban area, the threshold values for TTC and PET were set as 1.5 s and 5 s, respectively. In order to avoid potential “virtual crashes” that can be identified by the software, the lower bound for TTC was set to 0.05 s [
32].
3. Results
In this section the main results of the network performance and safety analysis for the two scenarios are presented. As the main focus of the study is to show how AVs can affect the safety of cyclists, the number and level of severity of conflicts between cyclists and cars are also provided. The results of the network performance are the average values, while the conflicts are the sum of the simulation runs (
Table 2).
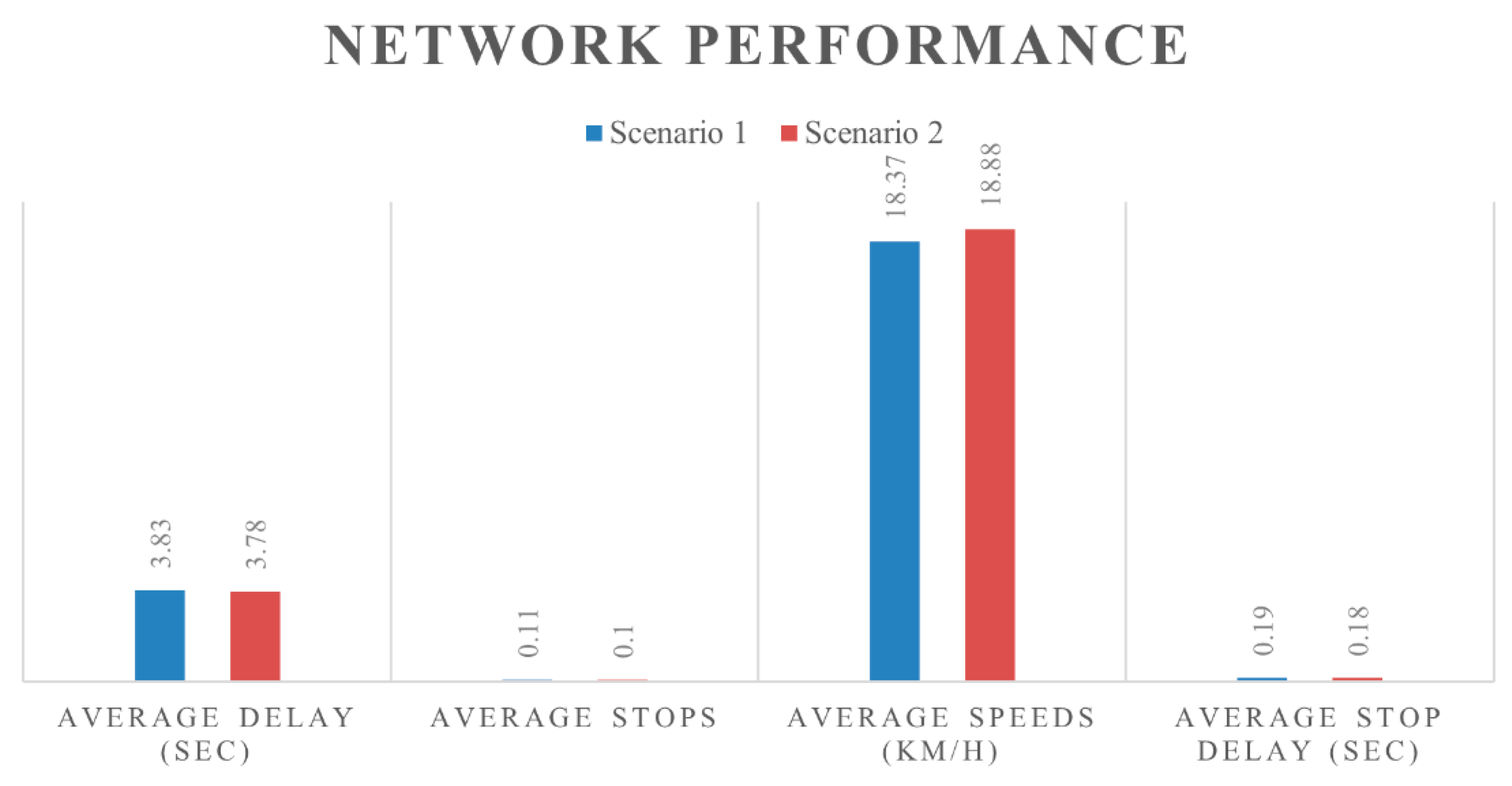
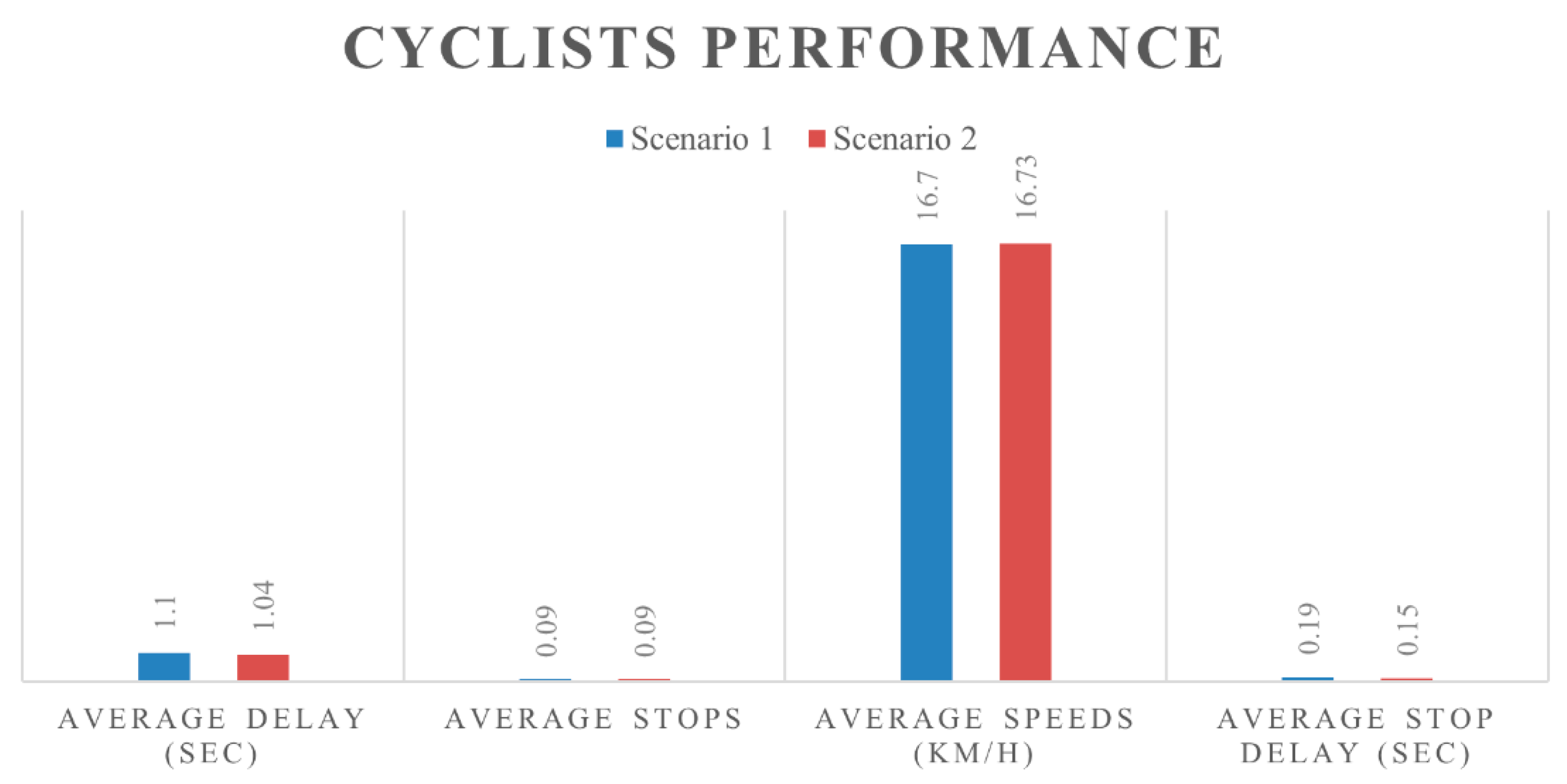
Figure 9 shows the network performance through different variables before and after the implementation of AVs, while
Figure 10 is the respective graph taking into account only the cyclists. In the second scenario, the modeling of car traffic flow consisting of only AVs improved the network performance by reducing the average delay from 3.83 s to 3.78 s and increasing the average vehicles speeds from 18.37 km/h to 18.88 km/h. Cyclists performance measures also presented minor improvements in that case as the average delay was decreased from 1.1 s to 1.04 s while the average speed was increased from 16.7 km/h to 16.73 km/h.
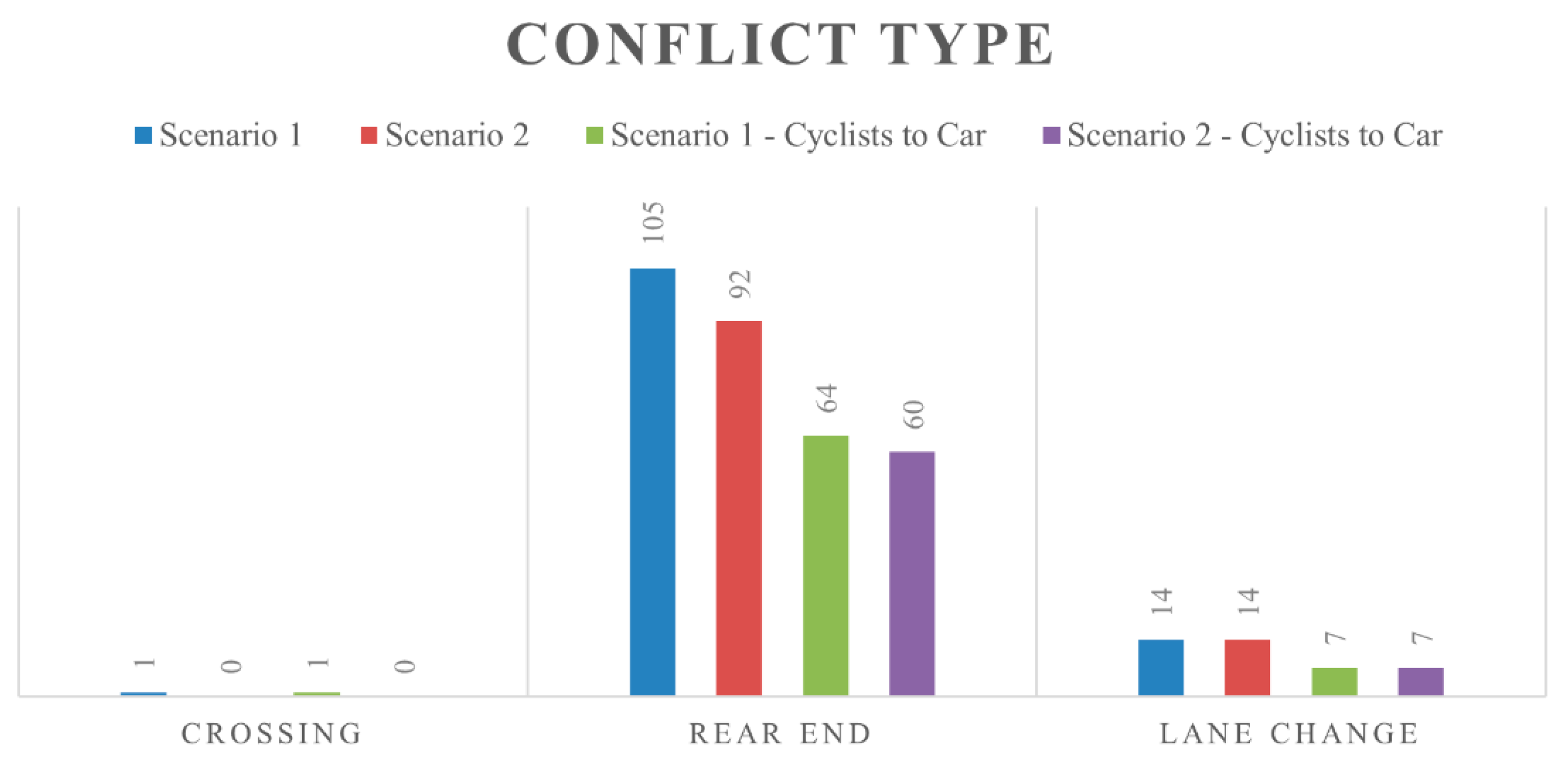
Figure 11 provides an overview of the total number of conflicts by type per each scenario. The three types of conflicts are: (i) crossing; (ii) rear-end; and (iii) lane change. The classification of the abovementioned categories is based on the conflict angle of each pair of vehicles. The default values were adopted:
Crossing: conflict angle > 85°
Rear-end: conflict angle < 30°
Lane-change: 30° ≤ conflict angle ≤ 85°
The results in the second scenario show a reduction in the total number of conflicts for the entire network from 120 to 106 but also in the number of conflicts between cyclists and cars from 72 to 67. The main reduction of conflicts in the network was noticed in rear-end collisions which were the most frequently observed type of conflict.
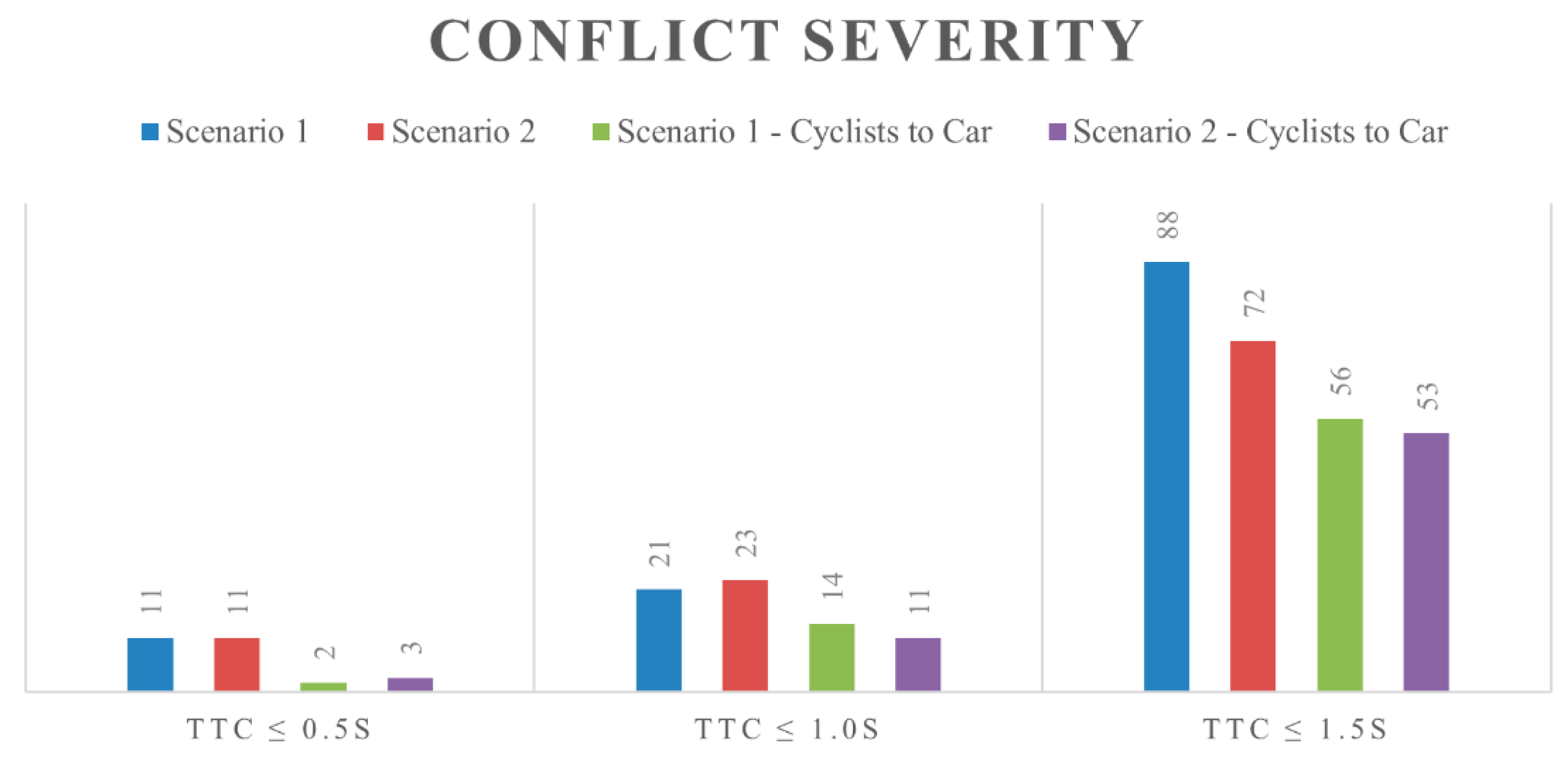
Figure 12 shows the number of conflicts broken down by different severity levels for the two scenarios based on TTC values. Here the three levels that were adopted based on Gettman et al. 2018 [
32] are:
TTC less or equal to 0.5 s
TTC less or equal to 1.0 s
TTC less or equal to 1.5 s
The results showed a notable reduction in the last level (TTC less or equal to 1.5 s) for the entire network.
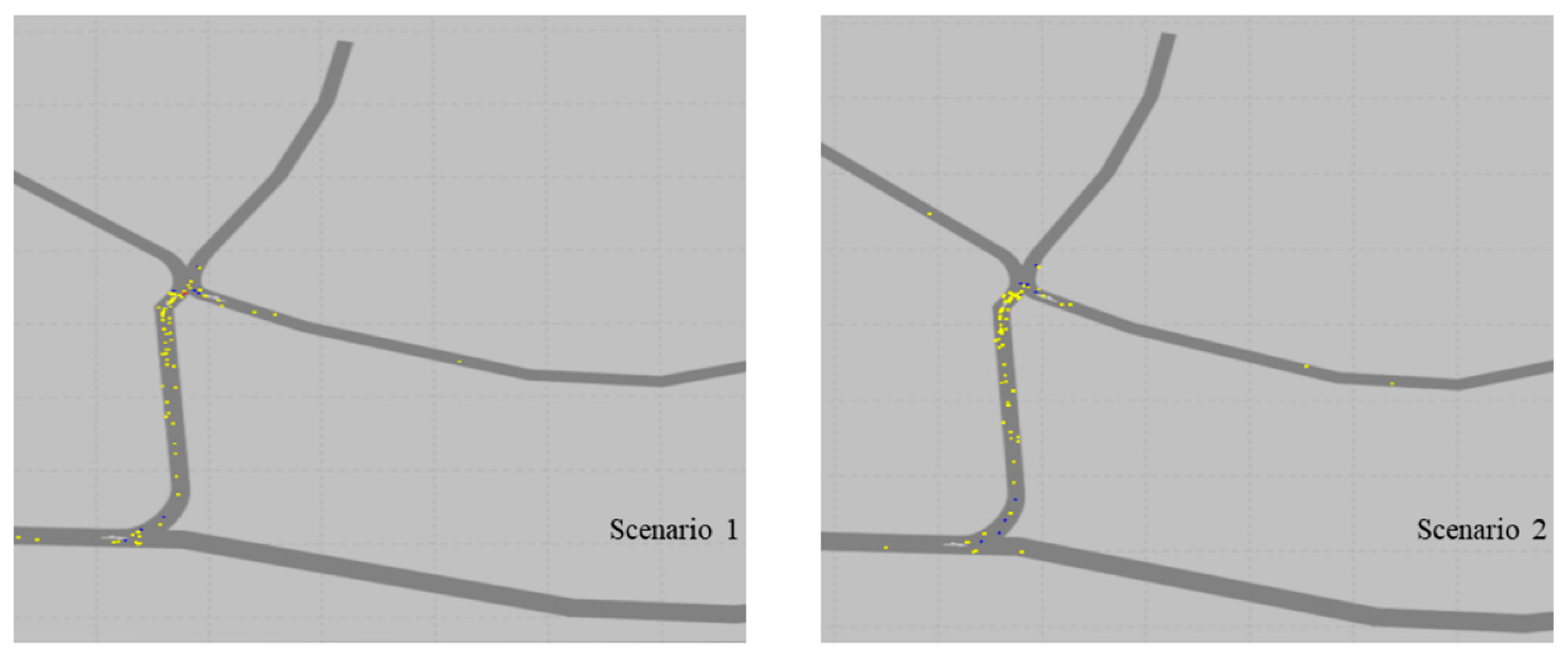
Figure 13 and
Figure 14 demonstrate the respective results for the intersections of the road network as it was found that the majority of the conflicts took place there (
Figure 15). The same trends were also followed here where the total number of conflicts were reduced from 62 to 46, while the number of conflicts involving a cyclist and a car from 34 to 25. It is worth mentioning that the reductions mainly took place in rear-end collisions and in conflicts with a severity level TTC less than or equal to 1.5 s.
4. Discussion
The findings confirmed that AVs have the ability to improve road safety and network performance. From the analysis of the results, we can directly observe that the introduction of AVs in the road network reduced the total number and severity level of conflicts. It can also be seen that the majority of conflicts occurred at the intersections, which was expected as they consist a complex traffic situation where different types of road users encounter [
33]. Regarding cyclists’ safety, which was the main focus of this study, the results followed the same trend. The total number and severity level of conflicts between cyclists and cars were also decreased while minor improvements were observed in their traffic performance.
Regarding the calibration of the model, using the default parameters for cyclists and cars resulted in an increase of the total number of conflicts by 71%. Video recordings or historical data were not available to validate this but based on visual observations it was considered to be unrealistic. Nonetheless, it demonstrated that safety performance analysis using microsimulation models highly depends on the values of driving behavior parameters. The default model was also representing free-flow conditions, which was inaccurate since we noticed the formation of queues before the intersections. The calibration of speeds, as a consequence, created congestion in specific locations, capturing the real situation better.
The same argument can be applied to the simulation of AVs, as different driving logics imply different parameters, which could have a direct impact on the results of the model. The more cautious logic that was applied in our case, potentially possesses greater benefits in terms of road safety, having a trade-off relationship with traffic performance. Finally, while it was assumed that the cyclists’ behavior would be the same after the implementation of AVs, this relationship should be investigated further.
5. Conclusions
In this study we aimed to model the behavior of cyclists in peak hour traffic in a city center and examine the potential benefits of AVs on their safety as accurately as possible. Representing cyclists in a microsimulation environment is quite challenging due to the variability of their performance and their decision-making processes. However, replicating real-world traffic flow and driving behavior is crucial for the calculation of safety indicators, their interpretation and their application.
Modelling and simulation are widely used to investigate the impact of AVs and support their development and implementation. However, these simulations are usually conducted without good accuracy, since they are mainly based on assumptions. PTV Vissim incorporates driving behavior models for AVs based on field data for the first time, but hypotheses are still needed to represent their kinematics in relation to the in-vehicle experience of their users.
Although many reports have clearly stated the need for significant investment in research and innovation related to infrastructure for AVs [
34,
35], until now, no empirical proof has been established. It is undisputable that AVs will adopt a different driving behavior compared to human-driven vehicles and this change calls for infrastructure adaptation. In addition cyclists might also adapt their behavior in the long term, which might also necessitate infrastructure adaptation. For this work, in the case of uncontrolled intersections in urban streets, we assumed that road users will adjust their speed to ensure safety and comfort but redesign of infrastructure as optimization of crosswalk locations, cycling facilities and corner radius could potentially enhance traffic performance and road safety.
The findings of the analysis show that AVs hold the potential to improve safety for cyclists in urban areas. More specifically, significant decreases were estimated in the number of conflicts and the level of severity after the introduction of AVs, with the most frequently observed type of conflict to be rear-end collisions.
The main contribution of this work is to implement a practical approach to simulate cyclists and cars sharing the same lane that is quite usual in city centers, and to provide a reference on the impact of AVs on cyclist’s safety in urban areas. Further research will focus on the optimal configuration of the parameters as their values can highly influence the results of the simulations and the investigation of cyclists’ behavior when they encounter AVs.
Author Contributions
Conceptualization, P.T. and A.P.; methodology, P.T.; validation, A.P., T.B. and H.F.; formal analysis, P.T.; investigation, P.T.; data curation, P.T.; writing—original draft preparation, P.T.; writing—review and editing, A.P., T.B. and H.F.; visualization, P.T.; supervision, A.P.
Acknowledgments
This research received no external funding. Pavlos Tafidis would like to acknowledge the support of PTV AG by providing PTV Vissim for his Ph.D. research project.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, K.; Akar, G. The perceptions of bicycling intersection safety by four types of bicyclists. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 67–80. [Google Scholar] [CrossRef]
- Deenihan, G.; Caulfield, B. Estimating the health economic benefits of cycling. J. Transp. Health 2014, 1, 141–149. [Google Scholar] [CrossRef]
- Scholes, S.; Wardlaw, M.; Anciaes, P.; Heydecker, B.; Mindell, J.S. Fatality rates associated with driving and cycling for all road users in Great Britain 2005–2013. J. Transp. Health 2018, 8, 321–333. [Google Scholar] [CrossRef]
- Cantisani, G.; Moretti, L.; Barbosa, Y.D. Risk Analysis and Safer Layout Design Solutions for Bicycles in Four-Leg Urban Intersections. Safety 2019, 5, 24. [Google Scholar] [CrossRef]
- Liu, J.; Khattak, A.J. Delivering improved alerts, warnings, and control assistance using basic safety messages transmitted between connected vehicles. Transp. Res. Part C Emerg. Technol. 2016, 68, 83–100. [Google Scholar] [CrossRef]
- Singh, S. Critical reasons for crashes investigated in the National Motor Vehicle Crash Causation Survey; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2015. [Google Scholar]
- Cui, J.; Liew, L.S.; Sabaliauskaite, G.; Zhou, F. A review on safety failures, security attacks, and available countermeasures for autonomous vehicles. Ad Hoc Netw. 2019, 90, 101823. [Google Scholar] [CrossRef]
- Morrison, C.N.; Thompson, J.; Kondo, M.C.; Beck, B. On-road bicycle lane types, roadway characteristics, and risks for bicycle crashes. Accid. Anal. Prev. 2019, 123, 123–131. [Google Scholar] [CrossRef] [PubMed]
- Duc-Nghiem, N.; Hoang-Tung, N.; Kojima, A.; Kubota, H. Modeling cyclists’ facility choice and its application in bike lane usage forecasting. IATSS Res. 2018, 42, 86–95. [Google Scholar] [CrossRef]
- Allsop, R.; Thomas, P.; Avenoso, A.; Jost, G. Making Walking and Cycling on Europe’s Roads Safer; Pin Flash Report 29; European Transport Safety Council: Etterbeek, Belgium, 2015. [Google Scholar]
- European Commission. Pedestrians and Cyclists. European Road Safety Observatory, 2015. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/ersosynthesis2015-pedestrianscyclists25_en.pdf (accessed on 28 June 2019).
- Wall, S.P.; Lee, D.C.; Frangos, S.G.; Sethi, M.; Heyer, J.H.; Ayoung-Chee, P.; DiMaggio, C.J. The Effect of Sharrows, Painted Bicycle Lanes and Physically Protected Paths on the Severity of Bicycle Injuries Caused by Motor Vehicles. Safety 2016, 2, 26. [Google Scholar] [CrossRef] [PubMed]
- AASHTO. A Policy on Geometric Design of Highways and Streets; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2001. [Google Scholar]
- Lutin, J.M.; Kornhauser, A.L.; Lerner-Lam, E. The revolutionary development of self-driving vehicles and implications for the transportation engineering profession. ITE J. 2013, 83, 28–32. [Google Scholar]
- Hayeri, Y.M.; Hendrickson, C.T.; Biehler, A.D. Potential Impacts of Vehicle Automation on Design, Infrastructure and Investment Decisions—A State DOT Perspective. In Proceedings of the Transportation Research Board 94th Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- McDonald, S.S.; Rodier, C. Envisioning Automated Vehicles within the Built Environment Studying Columbia MD and its early planning for implementation of a PRT system and how it affected the urban design View project. In Road Vehicle Automation 2: Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Nourinejad, M.; Bahrami, S.; Roorda, M.J. Designing parking facilities for autonomous vehicles. Transp. Res. Part B Methodol. 2018, 109, 110–127. [Google Scholar] [CrossRef]
- Millard-Ball, A. The autonomous vehicle parking problem. Transp. Policy 2019, 75, 99–108. [Google Scholar] [CrossRef]
- PTV AG. PTV Vissim 11. Planung Transport Verkehr AG; PTV: Karlsruhe, Germany, 2018. [Google Scholar]
- FHWA. Surrogate Safety Assessment Model (SSAM); Federal Highway Administration: Washington, DC, USA, 2010. [Google Scholar]
- Mehta, K.; Mehran, B.; Hellinga, B. A methodology to estimate the number of unsafe vehicle-cyclist passing events on urban arterials. Accid. Anal. Prev. 2019, 124, 92–103. [Google Scholar] [CrossRef] [PubMed]
- del Carmen Almanza Mendoza, A.; Aguilar, L.Á.T.; Jiménez García, J.A.; González, S.H.; Esquivas, M.T.; Fernández, V.F.; Soto, D.F. Bikeway system design in the city of Celaya through a micro-simulation approach. Transp. Res. Procedia 2018, 33, 371–378. [Google Scholar] [CrossRef]
- Ismail, K.; Sayed, T.; Saunier, N. Automated Analysis of Pedestrian–Vehicle Conflicts. Transp. Res. Rec. J. Transp. Res. Board 2010, 2198, 52–64. [Google Scholar] [CrossRef]
- COWI. Micro Simulation of Cyclists in Peak Hour Traffic; COWI: Copenhagen, Denmark, 2013. [Google Scholar]
- Cafolla, D.; Chen, I.M.; Ceccarelli, M. An experimental characterization of human torso motion. Front. Mech. Eng. 2015, 10, 311–325. [Google Scholar] [CrossRef]
- Cafolla, D.; Marco, C. Design and Simulation of Humanoid Spine. Mech. Mach. Sci. 2015, 24, 585–593. [Google Scholar] [CrossRef]
- Van Noort, M.; Van Arem, B.; Park, B. MOBYSIM: An integrated traffic simulation platform. In Proceedings of the 13th International IEEE Annual Conference on Intelligent Transportation Systems, Madeira Island, Portugal, 19–22 September 2010; pp. 19–22. [Google Scholar] [CrossRef]
- Li, Z.; Chitturi, M.; Zheng, D.; Bill, A.; Noyce, D. Modeling Reservation-Based Autonomous Intersection Control in VISSIM. Transp. Res. Rec. J. Transp. Res. Board 2013, 2381, 81–90. [Google Scholar] [CrossRef]
- Wagner, P. Traffic control and traffic management in a transportation system with autonomous vehicles. In Autonomous Driving; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 301–316. [Google Scholar]
- Sukennik, P.; PTV Group. Micro-Simulation Guide for Automated Vehicles. COEXIST (h2020-coexist.eu). 2018. Available online: https://www.h2020-coexist.eu/wp-content/uploads/2018/11/D2.5-Micro-simulation-guide-for-automated-vehicles.pdf (accessed on 28 June 2019).
- Fries, R.; Qi, Y.; Leight, S. How Many Times Should I Run the Model? Performance Measure Specific Findings from Vissim Models in Missouri. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model. and Validation: Final Report; Federal Highway Administration: Washington, DC, USA, 2008. [Google Scholar]
- Cantisani, G.; Moretti, L.; Barbosa, Y.D. Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections. Safety 2019, 5, 6. [Google Scholar] [CrossRef]
- Farah, H.; Erkens, S.M.J.G.; Alkim, T.; van Arem, B. Infrastructure for Automated and Connected Driving: State of the Art and Future Research Directions. Road Veh. Autom. 2018, 4, 187–197. [Google Scholar] [CrossRef]
- Lu, X.; Madadi, B.; Farah, H.; Snelder, M.; Annema, J.A.; Arem, B.V. Scenario-Based Infrastructure Requirements for Automated Driving. In Proceedings of the CICTP 2019: Transportation in China—Connecting the World, Nanjing, China, 6–8 July 2019; pp. 5684–5695. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}