Intent to Adopt Location Sharing for Logging Safety Applications



Abstract
1. Introduction
2. Materials and Methods
2.1. Survey Population and Administration
2.2. Survey Instrument
2.3. Data Analysis
3. Results
3.1. Completed Sample
3.2. Participant Background Information
3.3. TPB Assessment
3.4. Additional LS Adoption Elements
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

| Theme | Survey Question |
|---|---|
| Background | 1. Have you ever used the following location-sharing devices during logging operations? |
| ▪ Emergency search and rescue receivers (e.g., SPOT, inReach) | |
| ▪ 2-way radios with location-sharing (e.g., Garmin Rino) | |
| ▪ Devices that use smartphones to share locations (e.g., goTenna) | |
| Adoption | 2. In your opinion, would the following types of location-sharing devices improve safety on active logging operations? |
| ▪ Emergency search and rescue receivers (e.g., SPOT, inReach) | |
| ▪ 2-way radios with location-sharing (e.g., Garmin Rino) | |
| ▪ Devices that use smartphones to share locations (e.g., goTenna) | |
| Adoption | 3. In your opinion, would the following features of location-sharing devices help improve workplace safety? |
| ▪ Alerts when workers enter dangerous areas | |
| ▪ Automatic updates of user positions to coworkers at the jobsite | |
| ▪ Automatic updates of user positions to supervisors at the office | |
| ▪ SOS or Help button to contact coworkers at the jobsite | |
| ▪ SOS or Help button to contact supervisors at the office | |
| ▪ SOS or Help button to contact emergency services | |
| ▪ Messaging through text, voice, or video | |
| Adoption | 4. Would you be concerned about worker privacy if workers’ real-time locations were seen by the following people? |
| ▪ Coworkers at the jobsite | |
| ▪ Supervisors or others at a remote office or shop | |
| Background | 5. (a) Do you own a smartphone? |
| (b) How often do you carry your smartphone with you while working on logging operations (either turned on or off)? | |
| Adoption | 6. How concerned would you be about having to carry an extra device (such as on the belt or in a pocket) while working on logging operations? |
| Adoption | 7. How can location-sharing devices best be used to improve safety on logging operations? Please rank the following in order of importance (1,2,3,4), where 1 = the most important safety application, and 4 = the least important safety application. |
| ▪ Contacting off-site emergency response | |
| ▪ Finding injured workers quickly | |
| ▪ Alerting coworkers when someone needs help | |
| ▪ Preventing accidents on the jobsite | |
| Background | 8. How important or unimportant is it to find new ways of improving safety on logging operations? |
| TPB | 9. How likely or unlikely are the following results if personal location-sharing devices are used on logging operations? |
| ▪ Improving overall workplace safety | |
| ▪ Developing a dependence on the technology | |
| ▪ Finding injured coworkers faster | |
| ▪ Causing distraction from other work activities | |
| ▪ Knowing when coworkers might need help | |
| ▪ Causing workers to feel like they are being watched or monitored | |
| ▪ Knowing when coworkers are in safe or unsafe areas | |
| TPB | 10. How good or bad are the following results of using personal location-sharing devices on logging operations? |
| ▪ Improving overall workplace safety | |
| ▪ Developing a dependence on the technology | |
| ▪ Finding injured coworkers faster | |
| ▪ Causing distraction from other work activities | |
| ▪ Knowing when coworkers might need help | |
| ▪ Causing workers to feel like they are being watched or monitored | |
| ▪ Knowing when coworkers are in safe or unsafe areas | |
| TPB | 11. How likely or unlikely are you to use personal location-sharing devices (PLDs) in the following ways on active logging operations? |
| ▪ Using PLDs with local, automatic location sharing for hand fallers | |
| ▪ Using PLDS on all ground workers and heavy equipment | |
| ▪ Using GPS-based PLDs and geofences for general situational awareness | |
| TPB | 12. Within your company or organization, how much influence do you have in whether personal location-sharing devices get used? |
| TPB | 13. How likely or unlikely do you think other loggers are to use personal location-sharing devices (PLDs) in the following ways? |
| ▪ Using PLDs with local, automatic location sharing for hand fallers | |
| ▪ Using PLDS on all ground workers and heavy equipment | |
| ▪ Using GPS-based PLDs and geofences for general situational awareness | |
| Background | 14. What is your age? |
| Background | 15. How many years have you worked in the logging industry? |
| Background | 16. What is your current job? Please select all that apply. |
| ▪ Hand Faller | |
| ▪ Chaser/Hooker | |
| ▪ Equipment Operator | |
| ▪ Truck Driver | |
| ▪ Owner | |
| ▪ Other—please specify | |
| Background | 17. On which of the following types of operations do you usually work? Please select all that apply. |
| ▪ Mechanized ground-based logging (feller-buncher and skidder or shovel) | |
| ▪ Partially mechanized ground-based logging (hand faller and skidder or shovel) | |
| ▪ Cable logging | |
| ▪ Other—please specify |
References
- SPOT Gen3. Available online: https://www.findmespot.com/en/index.php?cid=100 (accessed on 8 December 2018).
- inReach Global Satellite Technology. Available online: https://explore.garmin.com/en-US/inreach (accessed on 8 December 2018).
- Introducing the Rino® 750 and 755t rugged GPS Navigator with Two-Way Radio and Connected Features. Available online: https://garmin.com/en-US/blog/fishandhunt/introducing-rino-750-755t-rugged-GPS-navigator-two-way-radio/ (accessed on 8 December 2018).
- Firefighter GPS Devices. Available online: https://www.raveon.com/firefighter-gps-devices/ (accessed on 8 December 2018).
- TW-850-01 TSM Ghost™. Available online: https://www.trellisware.com/wp-content/uploads/2017/02/TW-850-01-TSM-Ghost-Datasheet.pdf (accessed on 8 December 2018).
- Beartooth. Available online: https://www.beartooth.com (accessed on 8 December 2018).
- goTenna. Available online: https://www.gotenna.com/pages/mesh (accessed on 8 December 2018).
- Beartooth Technical Specs. Available online: https://beartooth.com/pages/beartooth-tech-specs (accessed on 8 December 2018).
- Keefe, R.F.; Eitel, J.U.H.; Smith, A.M.S.; Tinkham, W.T. Applications of multi-transmitter GPS-VhF in forest operations. In Proceedings of the 47th International Symposium on Forestry Mechanization and 5th International Forest Engineering Conference, Gerardmer, France, 23–26 September 2014. [Google Scholar]
- Fosbroke, D.E.; Kisner, S.M.; Myers, J.R. Working lifetime risk of occupational fatal injury. Am. J. Ind. Med. 1997, 31, 459–467. [Google Scholar] [CrossRef]
- Sygnatur, E.F. Logging is Perilous Work. Compens. Work. Cond. 1998, 3, 1–9. [Google Scholar]
- Bureau of Labor Statistics 2015 Census of Fatal Occupational Injuries. Available online: www.bls.gov/iif/oshwc/cfoi/cfch0014.pdf (accessed on 25 April 2017).
- Bureau of Labor Statistics 2014 Census of Fatal Occupational Injuries. Available online: www.bls.gov/iif/oshwc/cfoi/cfch0013.pdf (accessed on 17 October 2017).
- Bureau of Labor Statistics Occupational Injuries/Illnesses and Fatal Injuries Profiles. Available online: https://data.bls.gov/gqt/InitialPage (accessed on 24 April 2017).
- Shaffer, R.M.; Milburn, J.S. Injuries on feller-buncher/grapple skidder logging operations in the Southeastern United States. For. Prod. J. 1999, 49, 24–26. [Google Scholar]
- Bell, J.L.; Helmkamp, J.C. Non-fatal injuries in the West Virginia logging industry: Using workers’ compensation claims to assess risk from 1995 through 2001. Am. J. Ind. Med. 2003, 44, 502–509. [Google Scholar] [CrossRef]
- Roberts, T.; Shaffer, R.M.; Bush, R.J. Injuries on mechanized logging operations in the southeastern United States in 2001. Forest Prod. J. 2005, 55, 86–89. [Google Scholar]
- Lagerstrom, E.; Magzamen, S.; Rosecrance, J. A mixed-methods analysis of logging injuries in Montana and Idaho. Am. J. Ind. Med. 2017, 60, 1077–1087. [Google Scholar] [CrossRef]
- Bordas, R.M.; Davis, G.A.; Hopkins, B.L.; Thomas, R.E.; Rummer, R.B. Documentation of hazards and safety perceptions for mechanized logging operations in East Central Alabama. J. Agric. Saf. Health 2001, 7, 113–123. [Google Scholar] [CrossRef]
- Lefort, A.J.; Pine, J.C.; Marx, B.D. Characteristics of injuries in the logging industry of Louisiana, USA: 1986–1998. Int. J. For. Eng. 2003, 14, 75–89. [Google Scholar] [CrossRef]
- Scott, D.F. A study of logger fatalities from 1992-2000. Inj. Prev. 2004, 10, 239–243. [Google Scholar] [CrossRef]
- Logsafe GPS Monitoring. Available online: http://logsafe.co.nz/ (accessed on 8 December 2018).
- Zimbelman, E.G.; Keefe, R.F.; Strand, E.K.; Kolden, C.A.; Wempe, A.M. Hazards in motion: Development of mobile geofences for use in logging safety. Sensors 2017, 17, 822. [Google Scholar] [CrossRef]
- Wempe, A.M.; Keefe, R.K. Characterizing rigging crew proximity to hazards on cable logging operations using GNSS-RF: Effect of GNSS positioning error on worker safety status. Forests 2017, 8, 357. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.K. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13. [Google Scholar] [CrossRef] [PubMed]
- Newman, S.M.; Keefe, R.F.; Brooks, R.H.; Ahonen, E.Q.; Wempe, A.M. Human factors affecting logging injury incidents in Idaho and the potential for real-time location-sharing technology to improve safety. Safety 2018, 4, 43. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I. The Theory of Planned Behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Francis, J.; Eccles, M.P.; Johnston, M.; Walker, A.E.; Grimshaw, J.M.; Foy, R.; Kaner, E.F.S.; Smith, L.; Bonetti, D. Constructing Questionnaires Based on the Theory of Planned Behaviour: A Manual for Health Services Researchers; Centre for Health Services Research, University of Newcastle upon Tyne: Newcastle upon Tyne, UK, 2004; ISBN 0-9540161-5-7. [Google Scholar]
- Yzer, M. Reasoned Action Theory: Persuasion as Belief-Based Behavior Change. In The SAGE Handbook of Persuasion: Developments in Theory and Practice; Dillard, J.P., Shen, L., Eds.; SAGE Publications, Inc.: Thousand Oaks, CA, USA, 2012; ISBN 978145221840. [Google Scholar]
- Perloff, R.M. The Dynamics of Persuasion: Communication and Attitudes in the Twenty-First Century, 4th ed.; Taylor and Francis: New York, NY, USA, 2010; ISBN 9780203870327. [Google Scholar]
- Armitage, C.J.; Conner, M. Efficacy of the Theory of Planned Behavior: A meta-analytic review. Br. J. Soc. Psychol. 2001, 40, 471–499. [Google Scholar] [CrossRef] [PubMed]
- Blue, C.L.; Wilbur, J.; Marston-Scott, M.V. Exercise among blue-collar workers: Application of the Theory of Planned Behavior. Res. Nurs. Health 2001, 24, 481–493. [Google Scholar] [CrossRef] [PubMed]
- Welbourne, J.; Booth-Butterfield, S. Using the Theory of Planned Behavior and a Stage Model of Persuasion to Evaluate a Safety Message for Firefighters. Health Commun. 2005, 18, 141–154. [Google Scholar] [CrossRef] [PubMed]
- Montaño, D.E.; Kasprzyk, D. Theory of Reasoned Action, Theory of Planned Behavior, and the Integrated Behavioral Model. In Health Behavior: Theory, Research, and Practice Fifth Edition; Glanz, K., Rimer, B.K., Viswanath, K., Eds.; Jossey-Bass: San Francisco, CA, USA, 2015; pp. 95–103. ISBN 1118629051. [Google Scholar]
- Adamos, G.; Nathanail, E. Predicting the effectiveness of road safety campaigns through alternative research designs. J. Saf. Res. 2016, 59, 83–95. [Google Scholar] [CrossRef]
- Johnson, S.E.; Hall, A. The prediction of safe lifting behavior: An application of the theory of planned behavior. J. Saf. Res. 2005, 36, 63–73. [Google Scholar] [CrossRef]
- Colémont, A.; Van den Broucke, S. Measuring determinants of occupational health related behavior in flemish farmers: An application of the Theory of Planned Behavior. J. Saf. Res. 2008, 39, 55–64. [Google Scholar] [CrossRef]
- Quick, B.L.; Stephenson, M.T.; Witte, K.; Vaught, C.; Booth-Butterfield, S.; Patel, D. An examination of antecedents to coal miners’ hearing protection behaviors: A test of the theory of planned behavior. J. Saf. Res. 2008, 39, 329–338. [Google Scholar] [CrossRef] [PubMed]
- Fogarty, G.J.; Shaw, A. Safety climate and the Theory of Planned Behavior: Towards the prediction of unsafe behavior. Accid. Anal. Prev. 2010, 42, 1455–1459. [Google Scholar] [CrossRef] [PubMed]
- Helmkamp, J.C.; Bell, J.L.; Lundstrom, W.J.; Ramprasad, J.; Haque, A. Assessing safety awareness and knowledge and behavioral change among West Virginia loggers. Inj. Prev. 2004, 10, 233–238. [Google Scholar] [CrossRef] [PubMed]
- Koirala, A.; Kizha, A.R.; Roth, B.E. Perceiving major problems in forest products transportation by trucks and trailers: A cross-sectional survey. Eur. J. For. Eng. 2017, 3, 23–34. [Google Scholar]
- University of Idaho Extension LEAP Update 2018. Available online: https://www.uidaho.edu/-/media/UIdaho-Responsive/Files/Extension/forestry/events/leap-update-2018.ashx?la=en&hash=05A45BAC4429A9F97C91E546F0C47CB326CDAD61 (accessed on 6 March 2018).
- Associated Logging Contractors, Pro-Logger Program. Available online: http://www.idahologgers.com/pro-logger.html (accessed on 6 March 2018).
- Egan, A.F.; Hassler, C.C.; Grushecky, S.T. Logger certification and training: A view from West Virginia’s logging community. For. Prod. J. 1997, 47, 46–50. [Google Scholar]
- Egan, A.F. The introduction of a comprehensive logging safety standard in the USA—The first eighteen months. J. For. Eng. 1998, 9, 17–23. [Google Scholar] [CrossRef]
- Dillman, D.A.; Smyth, J.D.; Christian, L.M. Internet, Mail, and Mixed-mode Surveys the Tailored Design Method Third Edition; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009; ISBN 1118456149. [Google Scholar]
- Endsley, M.R. Toward a theory of situational awareness in dynamic systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016; Available online: https://www.R-project.org/ (accessed on 30 December 2016).
- Hankins, M.; French, D.; Horne, R. Statistical guidelines for studies of the Theory of Reasoned Action and the Theory of Planned Behavior. Psychol. Health 2000, 15, 151–161. [Google Scholar] [CrossRef]
- Bureau of Labor Statistics Quarterly Census of Employment and Wages, 2016 Annual Averages. Available online: https://data.bls.gov/cew/apps/data_views/data_views.htm#tab=Tables (accessed on 23 October 2017).
- Associated Logging Contractors, Inc. Personal Communication. 11 June 2018. [Google Scholar]
- Conway, S.H.; Pompeii, L.A.; Casanova, V.; Douphrate, D.I. A qualitative assessment of safe work practices in logging in the Southern United States. Am. J. Ind. Med. 2017, 60, 58–68. [Google Scholar] [CrossRef]
- Godin, G.; Kok, G. The Theory of Planned Behavior: A review of its applications to health-related behaviors. Am. J. Health Promot. 1996, 11. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F.; Anderson, N.M. Use of real-time GNSS-RF data to characterize the swing movements of forestry equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- Klen, T. Personal protectors and working behavior of loggers. Saf. Sci. 1997, 25, 89–103. [Google Scholar] [CrossRef]
- Tsai, J.Y.; Kelley, P.G.; Cranor, L.F.; Sadeh, N. Location-sharing technologies: Privacy risks and controls. J. Law Policy Inf. Soc. 2010, 6, 119–151. [Google Scholar]
- Tang, K.P.; Lin, J.; Hong, J.I.; Siewiorek, D.P.; Sadeh, N. Rethinking location sharing: Exploring the implications of social-driven vs. purpose-driven location sharing. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing, Copenhagen, Denmark, 26–29 September 2010; pp. 85–94. [Google Scholar] [CrossRef]
- Lederer, S.; Mankoff, J.; Dey, A.K. Who Wants to Know What When? Privacy Preference Determinants in Ubiquitous Computing. In Proceedings of the CHI 2003 Extended Abstracts on Human Factors in Computing Systems, Ft. Lauderdale, FL, USA, 5–10 April 2003; pp. 724–725. [Google Scholar] [CrossRef]
- Lynne, G.D.; Casey, C.F.; Hodges, A.; Rahmani, M. Conservation technology adoption decisions and the Theory of Planned Behavior. J. Econ. Psychol. 1995, 16, 581–598. [Google Scholar] [CrossRef]
- Pavlou, P.A.; Fygenson, M. Understanding and predicting electronic commerce adoption: An extension of the Theory of Planned Behavior. Manag. Inf. Syst. Q. 2006, 30, 115–143. [Google Scholar] [CrossRef]
- Lu, Y.; Zhou, T.; Wang, B. Exploring Chinese users’ acceptance of instant messaging using the Theory of Planned Behavior, the Technology Acceptance Model, and the Flow Theory. Comput. Hum. Behav. 2009, 25, 29–39. [Google Scholar] [CrossRef]
- Wang, S.; Fan, J.; Zhao, D.; Yang, S.; Fu, Y. Predicting consumers’ intention to adopt hybrid electric vehicles: Using an extended version of the Theory of Planned Behavior. Transportation 2016, 43, 123–143. [Google Scholar] [CrossRef]
- Morris, M.G.; Venkatesh, V. Age differences in technology adoption decisions: Implications for a changing work force. Pers. Psychol. 2000, 53, 375–403. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


| Attribute | Measure | Scale |
|---|---|---|
| Intent | Direct | 5-point, bipolar: unlikely–likely |
| Attitude (Instrumental) | Indirect | |
| Potential Outcome | 5-point, bipolar: unlikely–likely | |
| Value of Outcome | 5-point, bipolar: bad–good | |
| Perceived Norms (Descriptive) | Direct | 5-point, bipolar: unlikely–likely |
| Perceived Behavioral Control | Direct | 3-point, unipolar: none–a lot |
| Survey Question | Response Percentage (%) |
|---|---|
| Job Title (n = 277) | |
| Hand faller only | 1.8 |
| Chaser/hooker 1 only | 0.4 |
| Equipment operator only | 30.3 |
| Truck driver only | 1.1 |
| Owner only | 13.0 |
| Multiple jobs, including owner | 39.4 |
| Multiple jobs, not including owner | 10.5 |
| Other | 3.6 |
| Operation Type (n = 276) | |
| Mechanized ground 2 only | 33.0 |
| Partially mechanized ground 3 only | 16.3 |
| Cable yarding 4 only | 7.2 |
| Fully and partially mechanized | 13.8 |
| Ground and cable yarding | 19.2 |
| Other | 10.5 |
| Age (n = 278) | |
| 20–29 years | 7.9 |
| 30–39 years | 20.5 |
| 40–49 years | 16.2 |
| 50 or more years | 55.4 |
| Logging Experience (n = 278) | |
| 9 or less years | 7.9 |
| 10–19 years | 17.6 |
| 20–29 years | 21.9 |
| 30–39 years | 25.9 |
| 40 or more years | 26.6 |
| Survey Question | Response Percentage (%) | ||
|---|---|---|---|
| No | Unsure | Yes | |
| Emergency receivers (n = 271) | 91.5 | 1.8 | 6.6 |
| Two-way radios with LS (n = 270) | 79.3 | 1.1 | 19.6 |
| Smartphone receivers (n = 271) | 87.8 | 1.1 | 11.1 |
| Survey Question | Response Percentage (%) | |||||
|---|---|---|---|---|---|---|
| Very Unlikely | Somewhat Unlikely | Unsure | Somewhat Likely | Very Likely | ||
| A. Intent—Likelihood of adopting LS (self) | ||||||
| Automatic LS of hand fallers (n = 270) | 10.7 | 14.8 | 18.9 | 27.0 | 28.5 | |
| PLDS on workers and equipment (n = 274) | 10.2 | 14.6 | 23.7 | 32.1 | 19.3 | |
| PLDS for situational awareness (n = 273) | 10.3 | 13.9 | 28.9 | 29.7 | 17.2 | |
| B. Norms—Likelihood of others adopting LS | ||||||
| Automatic LS of hand fallers (n = 273) | 4.0 | 10.3 | 28.9 | 38.8 | 17.9 | |
| PLDS on workers and equipment (n = 273) | 2.6 | 15.4 | 38.1 | 34.8 | 9.2 | |
| PLDS for situational awareness (n = 272) | 4.4 | 14.0 | 40.1 | 34.2 | 7.4 | |
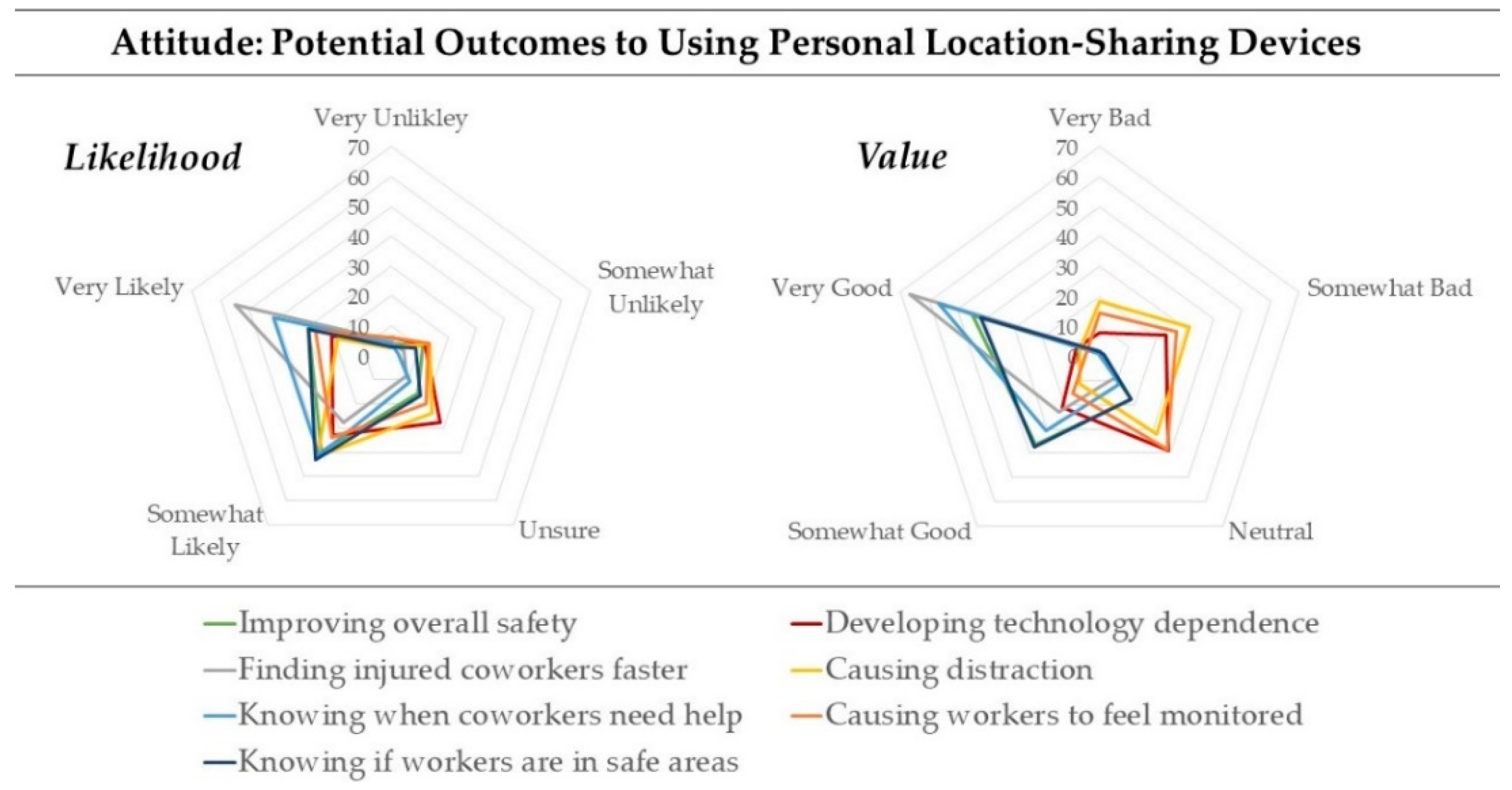
| C. Attitude—Likelihood of PLD use outcomes | ||||||
| Improving overall safety (n = 276) | 4.0 | 11.2 | 15.6 | 39.9 | 29.3 | |
| Developing technology dependence (n = 273) | 6.2 | 12.1 | 27.8 | 33.0 | 20.9 | |
| Finding injured coworkers faster (n=273) | 4.8 | 4.4 | 8.4 | 27.5 | 54.9 | |
| Causing distraction (n = 275) | 2.5 | 13.5 | 23.6 | 41.5 | 18.9 | |
| Knowing when coworkers need help (n = 272) | 4.0 | 2.6 | 10.7 | 41.2 | 41.5 | |
| Causing workers to feel monitored (n = 276) | 6.2 | 13.0 | 19.9 | 34.1 | 26.8 | |
| Knowing if workers are in safe areas (n = 277) | 2.9 | 8.7 | 16.6 | 43.0 | 28.9 | |
| Very Bad | Somewhat Bad | Neutral | Somewhat Good | Very Good | ||
| D. Attitude—Value of PLD use outcomes | ||||||
| Improving overall safety (n = 273) | 0.7 | 0.4 | 17.9 | 36.3 | 44.7 | |
| Developing technology dependence (n = 274) | 8.0 | 23.4 | 39.1 | 21.2 | 8.4 | |
| Finding injured coworkers faster (n = 274) | 1.5 | 0.0 | 8.8 | 23.0 | 66.8 | |
| Causing distraction (n = 275) | 18.2 | 31.3 | 32.0 | 11.6 | 6.9 | |
| Knowing when coworkers need help (n = 272) | 0.7 | 0.4 | 11.4 | 30.9 | 56.6 | |
| Causing workers to feel monitored (n = 270) | 14.4 | 27.0 | 38.5 | 15.2 | 4.8 | |
| Knowing if workers are in safe areas (n = 269) | 1.5 | 1.5 | 17.5 | 37.5 | 42.0 | |
| None | Some | A Lot | ||||
| E. Control—Influence in PLD use (n = 273) | 17.2 | 35.2 | 47.6 | |||
| Survey Question | Median | p-Value |
|---|---|---|
| Likelihood of using automatic LS for hand fallers | 4 | <0.001 |
| (3.5) | (<0.001) | |
| Likelihood of using PLDs on workers/equipment | 4 | <0.001 |
| (3.5) | (<0.001) | |
| Likelihood of using PLDs for situational awareness | 3 | <0.001 |
| (3.5) | (0.0001) |
| Behavior | P-Value (Chi-Squared Test Statistic) | ||
|---|---|---|---|
| Age | Phone | Age:Phone | |
| Automatic LS for hand fallers | 0.2077 | <0.001 | 0.7915 |
| (4.552) | (250.204) | (5.470) | |
| PLDs on workers and heavy equipment | 0.6271 | <0.001 | 0.7389 |
| (1.744) | (261.657) | (6.010) | |
| PLDs for general situational awareness | 0.6578 | <0.001 | 0.9674 |
| (1.607) | (254.152) | (2.919) | |
| Behavior | P-Value (Chi-Squared Test Statistic) | ||
|---|---|---|---|
| Attitude | Norms | Control | |
| Automatic LS for hand fallers | <0.001 (75.253) | <0.001 (55.839) | 0.0358 (6.657) |
| PLDs on workers and heavy equipment | <0.001 (75.143) | <0.001 (53.225) | 0.9851 (0.030) |
| PLDs for general situational awareness | <0.001 (76.003) | <0.001 (74.293) | 0.0453 (6.187) |
| Survey Question | Response Percentage (%) | |||
|---|---|---|---|---|
| No | Unsure | Yes | ||
| A. Improvement to safety by device | ||||
| Emergency receivers (n = 263) | 16.0 | 20.5 | 63.5 | |
| Two-way radios with LS (n = 269) | 8.6 | 12.6 | 78.8 | |
| Smartphone receivers (n = 272) | 14.0 | 14.0 | 72.1 | |
| B. Improvement to safety by feature | ||||
| Dangerous area alerts (n = 277) | 11.9 | 11.2 | 76.9 | |
| Automatic updates to coworkers (n = 275) | 13.1 | 14.2 | 72.7 | |
| Automatic updates to supervisors (n = 271) | 47.2 | 18.8 | 33.9 | |
| Help button to coworkers (n = 275) | 7.3 | 9.5 | 83.3 | |
| Help button to supervisors (n = 274) | 24.1 | 13.5 | 62.4 | |
| Help button to emergency services (n = 276) | 8.3 | 12.7 | 79.0 | |
| Messaging (n = 273) | 12.8 | 15.0 | 72.2 | |
| C. Privacy concerns associated with real-time LS | ||||
| Coworkers (n = 276) | 72.5 | 8.7 | 18.8 | |
| Supervisors (n = 273) | 56.0 | 11.4 | 32.6 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wempe, A.M.; Keefe, R.F.; Newman, S.M.; Paveglio, T.B. Intent to Adopt Location Sharing for Logging Safety Applications. Safety 2019, 5, 7. https://doi.org/10.3390/safety5010007
Wempe AM, Keefe RF, Newman SM, Paveglio TB. Intent to Adopt Location Sharing for Logging Safety Applications. Safety. 2019; 5(1):7. https://doi.org/10.3390/safety5010007
Chicago/Turabian StyleWempe, Ann M., Robert F. Keefe, Soren M. Newman, and Travis B. Paveglio. 2019. "Intent to Adopt Location Sharing for Logging Safety Applications" Safety 5, no. 1: 7. https://doi.org/10.3390/safety5010007
APA StyleWempe, A. M., Keefe, R. F., Newman, S. M., & Paveglio, T. B. (2019). Intent to Adopt Location Sharing for Logging Safety Applications. Safety, 5(1), 7. https://doi.org/10.3390/safety5010007