Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections




Abstract
1. Introduction
2. Methodology
- regular pavement, without distresses, ensuring high structural and functional performances (e.g., load bearing, adherence, regularity…);
- no adverse weather condition—the pavement is not contaminated, and the visibility is not impaired;
- efficient vehicles, both passenger cars and bicycles, with regular braking performances [37]; and
- an optimum and unobstructed view, to avoid impact.
2.1. Summary Approach
2.2. Elementary Approach
- the events that generate an opportunity for crash are all allowed maneuvers (i.e., crossing, left-turn, and right-turn);
- the mean hourly number of arrivals is equal from each approach, but the hourly vehicle flow QV does not necessarily coincide with the hourly bikes flow QB;
- bicycles and vehicles maneuvers per unit of time occur by a Poisson process, as shown by other transport risk analysis [45], according to Equation (6):
- the elementary unit of exposure is defined by Elvik et al. [32] (i.e., 1 s); therefore, according to Equation (6), the probability of at least one arrival (vehicles or bikes) during 1 s, is given by Equation (7):λ is calculated according to Equations (8) and (9), respectively, for the vehicles (λV) and bikes (λB):
- each maneuver from different approaches is independent of each other [13]; therefore, the probability that a vehicle p(V) impacts a bicycle p(B), within the same 1 s, is calculated according to Equation (10):where both p(V) and p(B) are calculated according to the Poisson distribution;
- the binomial distribution describes the real probability P that at least one crash might occur at the intersection where N conflict points have been detected according to Equation (11):where p is the probability of occurrence calculated according to Equation (10), and q is given by Equation (12):
2.3. Overall Risk of Collision
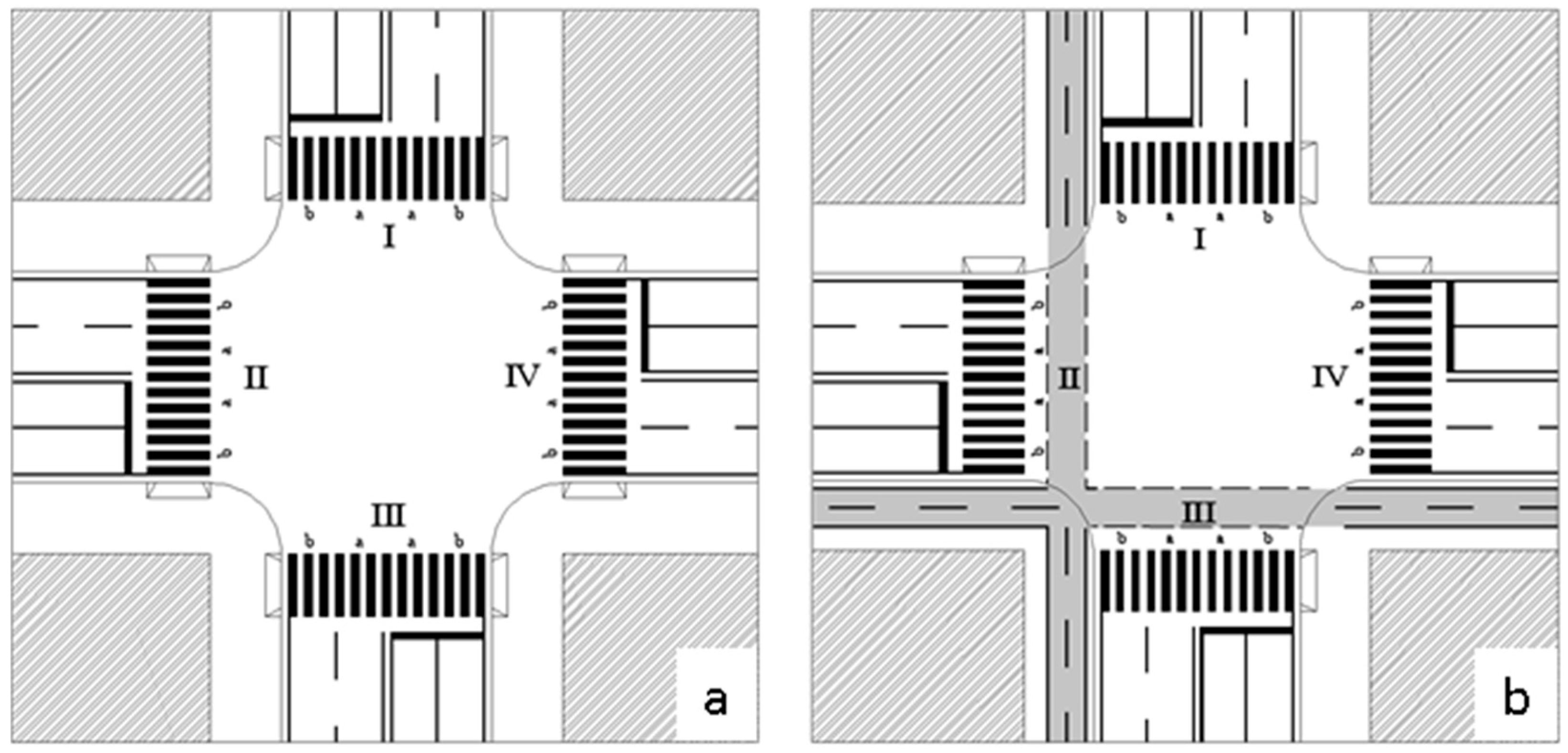
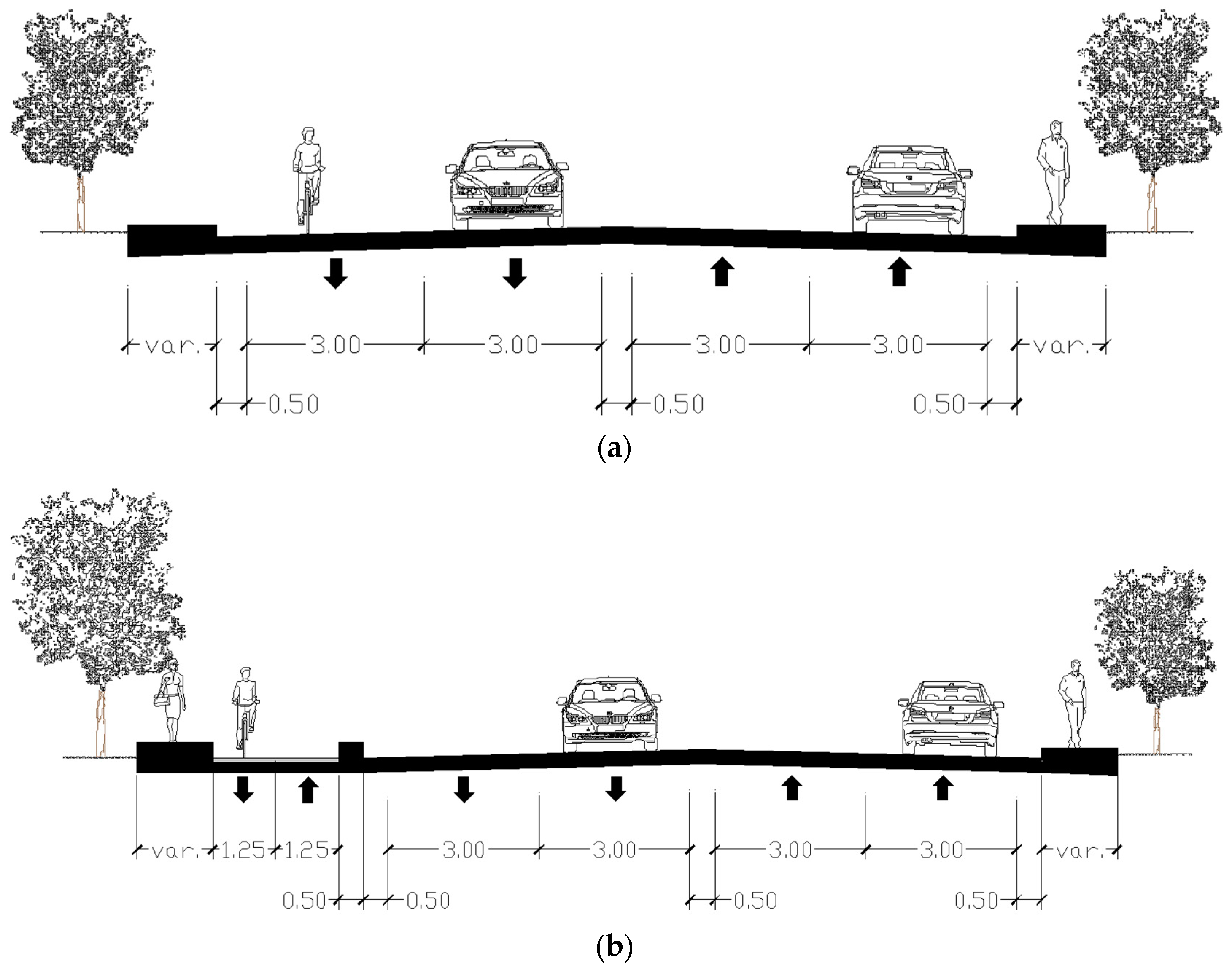
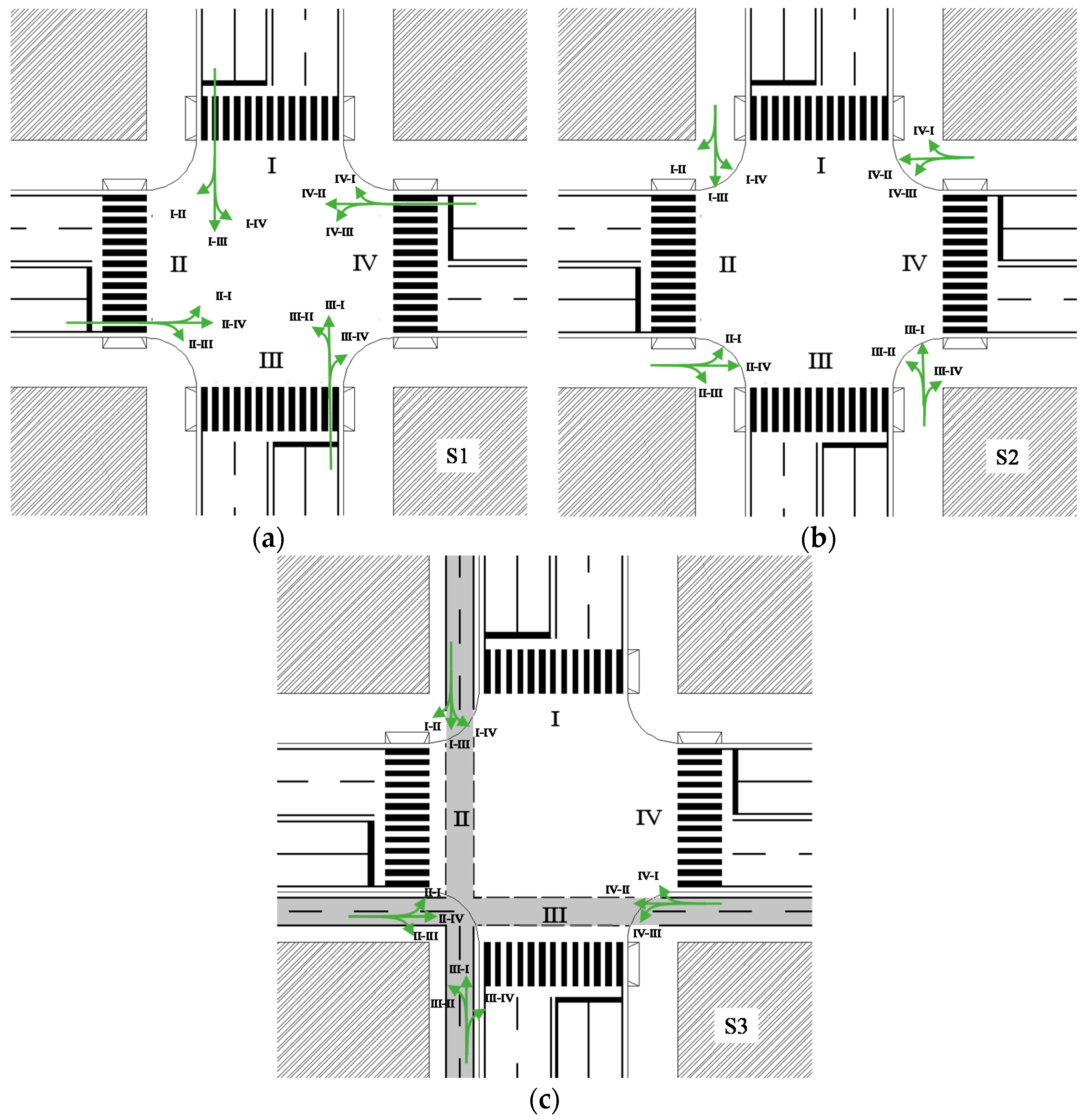
- Scheme 1 (S1) is a symmetrical four-arm intersection without a bike path. The cyclists use the carriageway to cross the intersection (Figure 5a);
- Scheme 2 (S2) is a symmetrical four-arm intersection without a bike path. The cyclists use the pedestrian crossings to cross the intersection, using the shortest paths (Figure 5b);
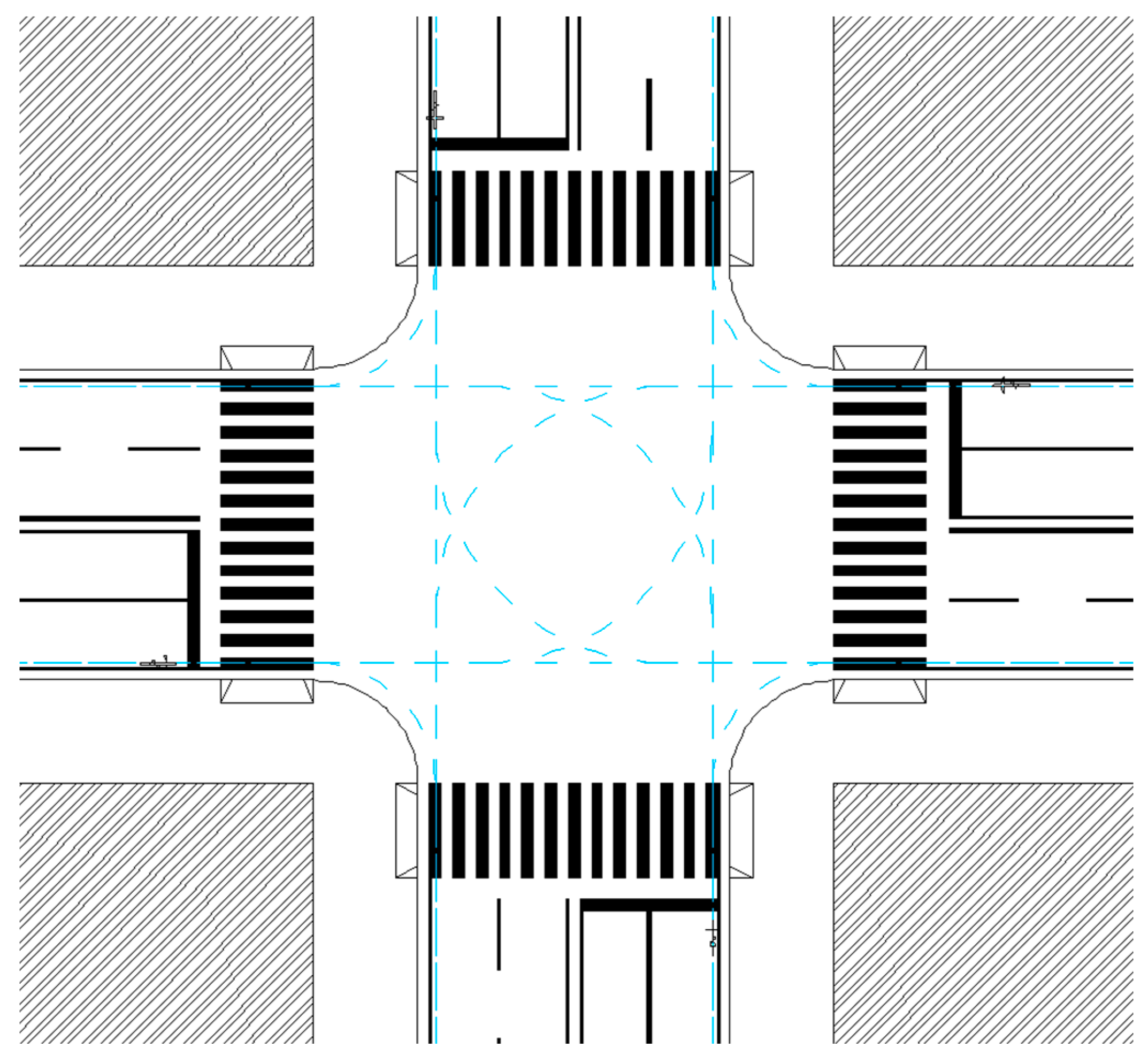
- Scheme 3 (S3) is a four-arm intersection with a bike path (Figure 5c).
3. Results
3.1. Summary Approach
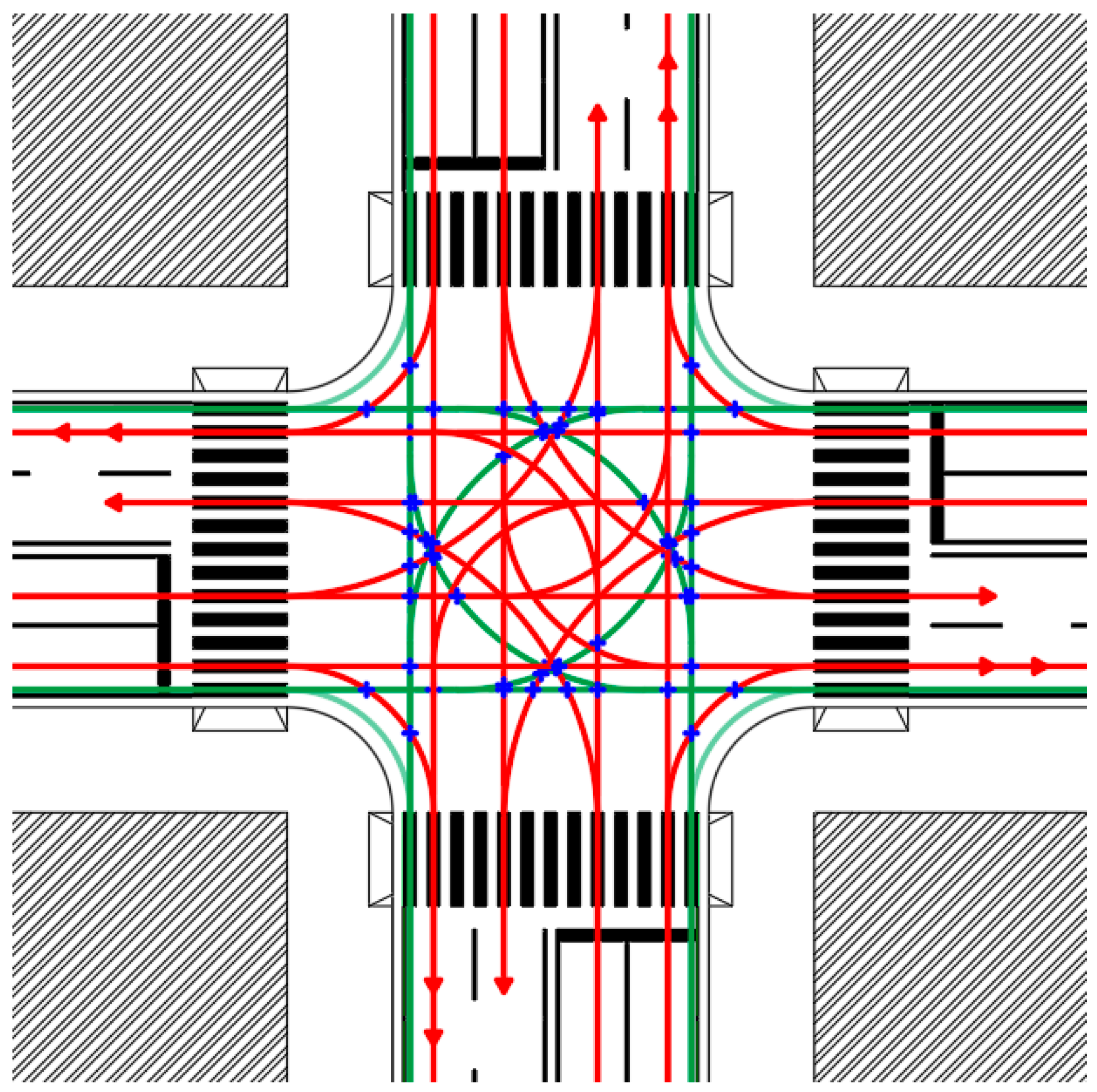
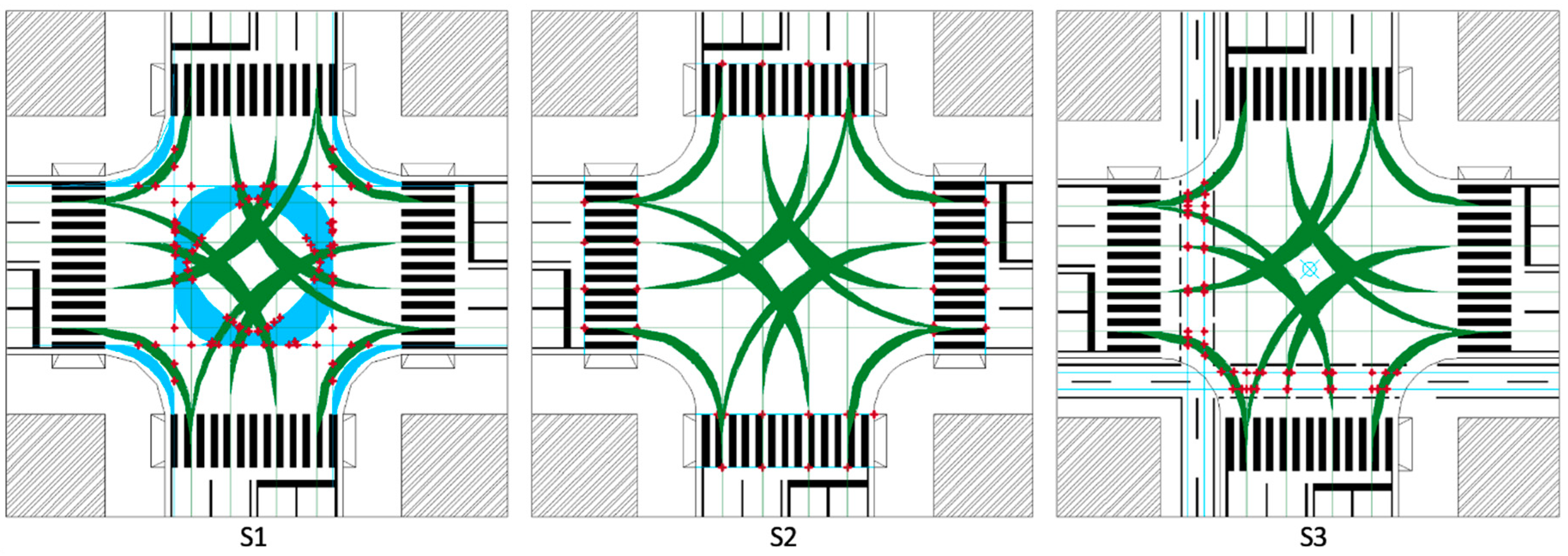
- Identification of the conflict areas: The envelope of different vehicle and bikes paths, from and to the same approaches, formed a whole conflict area. In this paper, all vehicles paths are green and all bike paths are orange.
- Calculation of the whole extension of conflict areas (ECA): ECA was the sum of the envelopes of conflict areas detected at the intersection.
- Identification of the most interfering maneuvers detected, according to the calculated conflict areas.
- Identification of the most dangerous maneuvers detected at the intersection, according to the minimum available ART.
- To calculate the cyclists’ exposure time to vehicles (ET).
3.2. Elementary Approach and Overall Risk Calculation
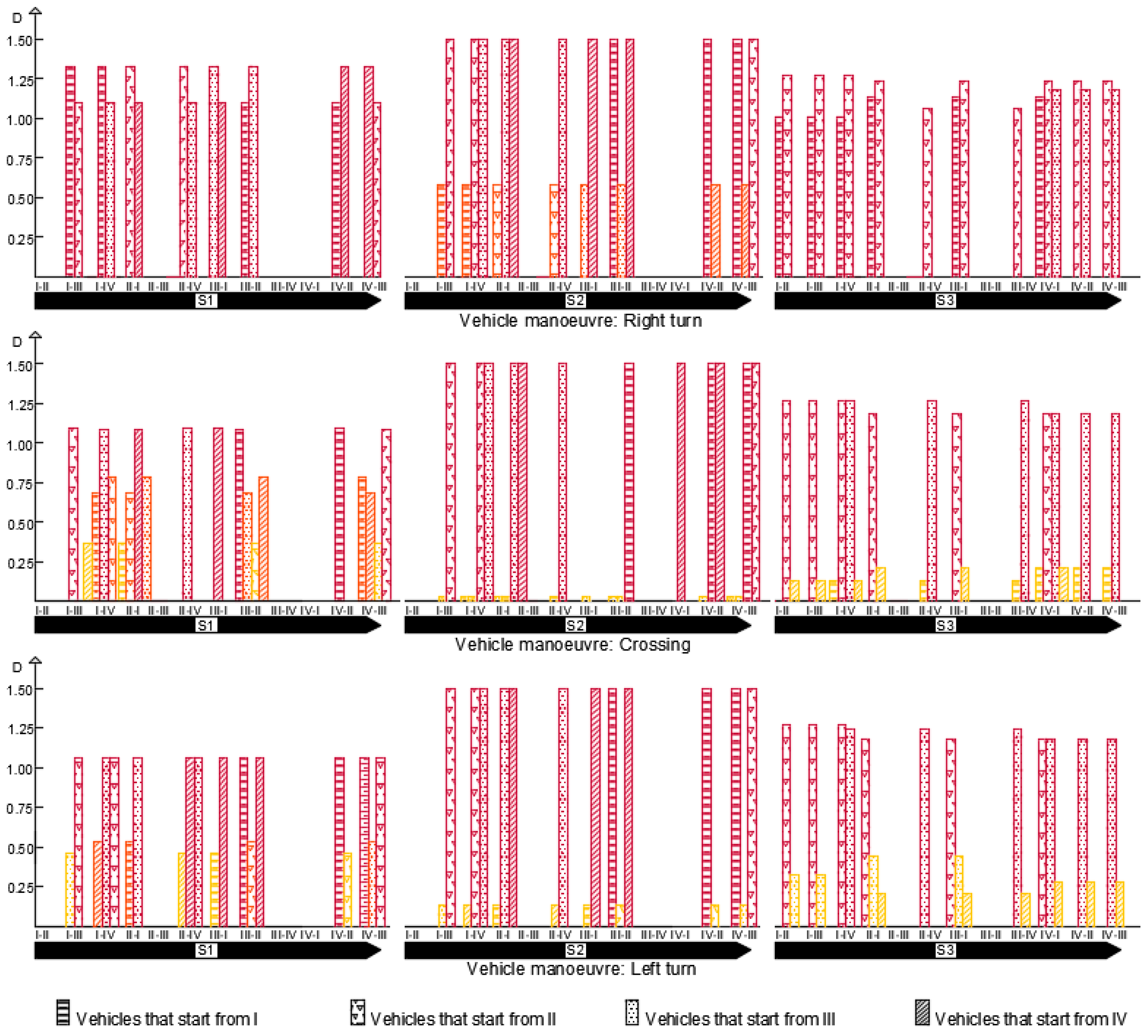
- S1 had the lowest number of functional CPs (i.e., 56), but most of them were red, none was green. The D values did not achieve the maximum value.
- S2 had 64 functional CPs and most of them were red; right-turn was the most dangerous maneuverer because its ART was 0 s, therefore, D had the highest value (i.e., 1.5). On the other hand, when compared to the other two schemes, S2 had the lowest values of D (i.e., slight interaction) in 19 yellow CPs.
- S3 had 64 functional CPs and more than half of them were red.
4. Discussion
- to locate the whole extension of the conflict areas identified by the envelope of interfering trajectories;
- to identify the most dangerous maneuvers, in terms of the time available to the vehicle users to avoid a collision, and the exposure time of cyclists; and
- to assess the current crash-risk between vehicles and bicycles.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- International Transport Forum (ITF). Road Safety Annual Report 2017; OECD Publishing: Paris, France, 2017. [Google Scholar]
- Kirolos, H.; Alluri, P.; Gan, A. Analyzing Pedestrian Crash Injury Severity at Signalized and Non-Signalized Locations. Accid. Anal. Prev. 2015, 81, 14–23. [Google Scholar]
- Levulytė, L.; Baranyai, D.; Török, Á.; Sokolovskij, E. Bicycles’ role in road accidents. A review of literature. Transp. Telecommun. 2016, 17, 122–127. [Google Scholar] [CrossRef]
- Loprencipe, G.; Moretti, L.; Cantisani, G.; Minati, G. Prioritization methodology for roadside and guardrail improvement: Quantitative calculation of safety level and optimization of resources allocation. J. Traffic Transp. Eng. 2018, 5, 348–360. [Google Scholar] [CrossRef]
- United Nations (UN). Improving global road safety. In Resolution Adopted by the General Assembly; United Nations: New York, NY, USA, 2010. [Google Scholar]
- Community Road Accident Database (CARE). Community Road Accident Database; CARE: New York, NY, USA, 2016. [Google Scholar]
- European Commission. Roadmap to a Single European Transport Area—Towards a Competitive and Resource Efficient Transport System; COM: Brussel, Belgium, 2011. [Google Scholar]
- Canale, S.; Leonardi, S.; Pappalardo, G. The reliability of the urban road network: Accident forecast models. In Proceedings of the III International Congress SIIV-People, Land, Environment and Transport Infrastructures, Bari, Italy, 22–24 September 2005. [Google Scholar]
- Moretti, L.; Moretti, M.; Ricci, S. Upgrading of Florence public transport to incorporate new tramlines [Riassetto del trasporto pubblico di Firenze a seguito dell’entrata in servizio di nuove linee di tram]. Ingegneria Ferroviaria 2017, 72, 569–584. [Google Scholar]
- Di Mascio, P.; Fusco, G.; Grappasonni, G.; Moretti, L.; Ragnoli, A. Geometrical and functional criteria as a methodological approach to implement a new cycle path in an existing urban road network: A case study in Rome. Sustainability 2018, 10, 2951. [Google Scholar] [CrossRef]
- Osservatorio Utenze Deboli. L’insicurezza stradale. In Incidentalità Urbana; Osservatorio Utenze Deboli: Rome, Italy, 2011. [Google Scholar]
- Istituto Nazionale di Statistica. Rapporto ISTAT. In Incidentalità Urbana; Istituto Nazionale di Statistica: Rome, Italy, 2015. [Google Scholar]
- Cantisani, G.; Loprencipe, G.; Primieri, F. The integrated design of urban road intersections: A case study. In Proceedings of the ICSDC 2011: Integrating Sustainability Practices in the Construction Industry, Kansas, MO, USA, 23–25 March 2011; pp. 722–728. [Google Scholar]
- Mauro, R.; Cattani, M. Model to evaluate potential accident rate at roundabouts. J. Transp. Eng. 2004, 130, 602–609. [Google Scholar] [CrossRef]
- Corazza, M.V.; Musso, A.; Finikopoulos, K.; Sgarra, V. An Analysis on Health Care Costs Due to Accidents Involving Powered Two Wheelers to Increase Road Safety. Transp. Res. Procedia 2016, 14, 323–332. [Google Scholar] [CrossRef]
- Piantini, S.; Baldanzini, N.; Pierini, M.; Mangini, M.; Franci, A.; Peris, A. An Overview on Pedestrians and Cyclists Serious Injuries in Urban Accidents. In Proceedings of the International Research Council on Biomechanics of Injury (IRCOBI), Zurich, Switzerland, 9–11 September 2015. [Google Scholar]
- Demasi, F.; Loprencipe, G.; Moretti, L. Road Safety Analysis of Urban Roads: Case Study of an Italian Municipality. Safety 2018, 4, 58. [Google Scholar] [CrossRef]
- Swedish Transport Administration. The Swedish Transport Administration Annual Report 4689; Swedish Transport Administration: Borlänge, Sweden, 2018.
- Tiwari, G.; Bangdiwala, S.; Saraswat, A.; Gaurav, S. Survival analysis: Pedestrian risk exposure at signalized intersections. Transp. Res. Part F 2007, 10, 77–89. [Google Scholar] [CrossRef]
- Isaksson-Hellman, I.; Werneke, J. Detailed description of bicycle and passenger car collisions based on insurance claims. Saf. Sci. 2017, 92, 330–337. [Google Scholar] [CrossRef]
- Dias, C.; Iryo-Asano, M.; Oguchi, T. Predicting Optimal Trajectory of Left-Turning Vehicle at Signalized Intersection. Transp. Res. Procedia 2016, 21, 240–250. [Google Scholar] [CrossRef]
- Tran, Q.; Firl, J. Online Maneuver Recognition and Multimodal Trajectory Prediction for Intersection Assistance using Non-parametric Regression. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Cantisani, G.; Loprencipe, G. A statistics based approach for defining reference trajectories on road sections. Mod. Appl. Sci. 2013, 7, 32–46. [Google Scholar] [CrossRef]
- Mauro, R.; Cattani, M.; Guerrieri, M. Evaluation of the safety performance of turbo roundabouts by means of a potential accident rate model. Baltic J. Road Bridge Eng. 2015, 10, 28–38. [Google Scholar] [CrossRef]
- Ma, Z.; Sun, J.; Wang, Y. A two-dimensional simulation model for modelling turning vehicles at mixed flow intersections. Transp. Res. Part C 2017, 75, 103–119. [Google Scholar] [CrossRef]
- Mathew, T.V.; Krishna Rao, K.V. Introduction to Transportation Engineering, Factors Affecting Transportation; NPTEL: New Delhi, India, 2007. [Google Scholar]
- Li, B.; Xiong, S.; Li, X.; Liu, M.; Zhang, X. The Behavior Analysis of Pedestrian-cyclist Interaction at Non-signalized Intersection on Campus: Conflict and Interference. Procedia Manuf. 2015, 3, 3345–3352. [Google Scholar] [CrossRef]
- Huang, L.; Wu, J. Study on the cyclist behavior at signalized intersections. IEEE Intell. Transp. Syst. 2004, 5, 317–322. [Google Scholar]
- Madsen, T.K.O.; Lahrmann, H. Comparison of five bicycle facility designs in signalized intersections using traffic conflict studies. Transp. Res. Part F 2016, 46, 438–450. [Google Scholar] [CrossRef]
- Vejregelrådet. Byernes Trafikarealer, Hæ fte 4, Vejkryds; Vejdirektoratet: Copenhagen, Denmark, 2010.
- Hauer, E. Exposure and Accident Rate. Traffic Eng. Control 1995, 36, 134–138. [Google Scholar]
- Elvik, R.; Erke, A.; Christensen, P. Elementary Units of Exposure. J. Transp. Res. Board 2009, 2103, 25–31. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, X.; Rong, J. Study of the Effects of Alcohol on Drivers and Driving Performance on Straight Road. Math. Probl. Eng. 2014, 2014, 607652. [Google Scholar] [CrossRef]
- Bates, L.J.; Davey, J.; Watson, B.; King, M.J.; Armstrong, K. Factors Contributing to Crashes among Young Drivers. Sultan Qabos Univ. Med. J. 2014, 14, 297–305. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti. Norme Funzionali e Geometriche per la Costruzione delle Strade [Functional and Geometrical Standards for Road Construction]; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2001.
- Ministero delle Infrastrutture e dei Trasporti. Norme Funzionali e Geometriche per la Costruzione delle Intersezioni Stradali [Functional and Geometrical Standards for Road Constructions]; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2006.
- Surblys, V.; Sokolovskij, E. Research of the Vehicle Brake Testing Efficiency. Procedia Eng. 2016, 134, 452–458. [Google Scholar] [CrossRef]
- Ministero dei Lavori Pubblici. Regolamento Recante Norme per la Definizione Delle Caratteristiche Tecniche Delle Piste Ciclabili [Standard for Technical Characteristics of Cyle Paths]; Ministero dei Lavori Pubblici: Rome, Italy, 1999.
- Beck, B.; Stevenson, M.; Newstead, S.; Cameron, P.; Judson, R.; Edwards, E.R.; Bucknill, A.; Johnson, M.; Gabbe, B. Bicycling crash characteristics: An in-depth crash investigation study. Accid. Anal. Prev. 2016, 96, 219–227. [Google Scholar] [CrossRef] [PubMed]
- Williams, K.M.; Stover, V.G.; Dixon, K.K.; Demosthenes, P. Transportation Research Board Access Management Manual, 2nd ed.; Transportation Research Board: Washington, DC, USA, 2014; ISBN 978-0-309-29541-3. [Google Scholar]
- Prati, G.; De Angelis, M.; Marín Puchades, V.; Fraboni, F.; Pietrantoni, L. Characteristics of cyclist crashes in Italy using latent class analysis and association rule mining. PLoS ONE 2017, 12, e0171484. [Google Scholar] [CrossRef] [PubMed]
- Green, M. “How Long Does It Take to Stop?” Methodological Analysis of Driver Perception-Brake Times. Transp. Hum. Factors 2010, 2, 195–216. [Google Scholar] [CrossRef]
- Zangenehpoura, S.; Straussa, J.; Miranda-Morenob, L.F.; Saunier, N. Are signalized intersections with cycle tracks safer? A case-control study based on automated surrogate safety analysis using video data. Accid. Anal. Prev. 2016, 86, 161–172. [Google Scholar] [CrossRef]
- Mauro, R. Traffic and Random Processes; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Moretti, L.; Cantisani, G.; Di Mascio, P.; Nichele, S.; Caro, S. A runway veer-off risk assessment based on frequency model: Part I. Probability analysis. In Proceedings of the International Congress on Transport Infrastructure and Systems TIS 2017, Rome, Italy, 10–12 April 2017. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ART (s) | Level of Damage | D | Chromatic Categorization |
|---|---|---|---|
| 0 < ART ≤ 1.5 | Very dangerous interaction | 1 ≤ D ≤ 1.5 | ● |
| 1.5 < ART ≤ 3 | Dangerous interaction | 0.5 < D ≤ 1 | ● |
| 3 < ART ≤ 4.5 | Slight interaction | 0 < D ≤ 0.5 | ● |
| ART > 4.5 | No interaction | - | ● |
| Scheme | ECA (m2) | Analysis of Conflict Areas | Analysis of Maneuvers | Maximum ART (s) | Minimum ET (s) | Maximum ET (s) | ||
|---|---|---|---|---|---|---|---|---|
| Most Interfering Maneuvers (-) | Largest ECA (m2) | Most Dangerous Maneuvers (-) | Minimum ART (s) | |||||
| S1 | 96.08 | (I-III)V-(I-IV)B (II-IV)V-(II-I)B (III-I)V-(III-II)B (IV-II)V-(IV-III)B | 8.75 | (right-turn)V-(crossing)B (right-turn)V-(left-turn)B | 0.49 | 3.38 | 6.42 | 15.76 |
| S2 | 118.36 | (I-II)V-(I-II, I-IV, II-IV, IV-II)B (II-III)V-(II-III, II-I, III-I, I-III)B (III-IV)V-(III-IV, III-II, IV-II, II-IV)B (IV-I)V-(IV-I, IV-III, I-III, III-I)B | 8.41 | (right-turn)V-(left-turn)B (left-turn)V-(left-turn)B (crossing)V-(left-turn)B | 0.00 | 5.13 | 6.30 | 12.06 |
| S3 | 22.41 | (II-I)V-(I-II, I-III, I-IV, II-I, II-IV, III-I, III-IV, IV-I,I V-II, IV-III)B | 1.89 | (II-III)V-(I-II)B (II-III)V-(I-III)B (II-III)V-(I-IV)B | 0.68 | 4.11 | 3.48 | 20.75 |
| Scheme | Total Number of CPs | Number of Red CPs | Number of Orange CPs | Number of Yellow CPs | Number of Green CPs |
|---|---|---|---|---|---|
| S1 | 56 | 32 | 12 | 12 | 0 |
| S2 | 24 | 12 | 4 | 8 | 0 |
| S3 | 24 | 16 | 0 | 8 | 0 |
| Scheme | p | P | R | Minimum Rij | Maximum Rij |
|---|---|---|---|---|---|
| S1 | 7.45 × 10−4 | 4.09 × 10−2 | 3.71 × 10−2 | 2.79 × 10−4 | 5.46 × 10−2 |
| S2 | 7.45 × 10−4 | 1.77 × 10−2 | 1.67 × 10−2 | 5.23 × 10−4 | 2.66 × 10−2 |
| S3 | 7.45 × 10−4 | 1.92 × 10−2 | 1.67 × 10−2 | 3.01 × 10−3 | 2.45 × 10−2 |
| Class of Risk | Maximum Rij | Minimum Rij |
|---|---|---|
| α | 1.00 × 10−1 | <1.00 × 10−2 |
| β | 1.00 × 10−2 | <1.00 × 10−3 |
| γ | 1.00 × 10−3 | <1.00 × 10−4 |
| Vehicle Maneuver | Percentage of CPs (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Right-turn | Crossing | Left-turn | |||||||
| Class of Risk Scheme | γ | β | α | γ | β | α | γ | β | α |
| S1 | 0 | 0 | 27 | 20 | 0 | 20 | 6 | 0 | 27 |
| S2 | 0 | 0 | 30 | 17 | 2 | 19 | 0 | 13 | 19 |
| S3 | 0 | 2 | 34 | 0 | 16 | 16 | 0 | 16 | 16 |
| Traffic ID | Traffic Volume | R | |||
|---|---|---|---|---|---|
| QV (veh./h) | QB (veh./h) | S1 | S2 | S3 | |
| T1 | 700 | 40 | 9.40 × 10−2 | 4.30 × 10−2 | 4.31 × 10−2 |
| T2 | 500 | 70 | 1.18 × 10−1 | 5.47 × 10−2 | 5.47 × 10−2 |
| T3 | 400 | 120 | 1.59 × 10−1 | 7.47 × 10−2 | 7.47 × 10−2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantisani, G.; Moretti, L.; De Andrade Barbosa, Y. Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections. Safety 2019, 5, 6. https://doi.org/10.3390/safety5010006
Cantisani G, Moretti L, De Andrade Barbosa Y. Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections. Safety. 2019; 5(1):6. https://doi.org/10.3390/safety5010006
Chicago/Turabian StyleCantisani, Giuseppe, Laura Moretti, and Yessica De Andrade Barbosa. 2019. "Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections" Safety 5, no. 1: 6. https://doi.org/10.3390/safety5010006
APA StyleCantisani, G., Moretti, L., & De Andrade Barbosa, Y. (2019). Safety Problems in Urban Cycling Mobility: A Quantitative Risk Analysis at Urban Intersections. Safety, 5(1), 6. https://doi.org/10.3390/safety5010006