
Robotics, Artificial Intelligence, and Drones in Solar Photovoltaic Energy Applications—Safe Autonomy Perspective




Abstract
1. Introduction
- Motivate a review of conventional practices and policies associated with the use of RAID devices that currently limit the broad utilization of various Solar PV installation systems.
- Highlight the need for a review of high-level systems assurance guidance or policies that will serve as the industry standard on the emerging use of RAID devices within solar installations.
- In view of the above, the contribution of this work is perceived as follows:
- To identify areas where conventional RAID device practices and policies could be reviewed and standardized for specific applications (use case), such as with solar farm integration.
- To examine several potential hazards associated with the use of RAID devices and provide insight into areas that may require policy review for industry-wide standardization.
- To provide insight into salient areas that could assist with this specific use case safety guidance, such as the autonomy level categorization and the need for an incident register section dedicated to activities related to the use of RAID devices.
2. Safe Autonomy and Solar Photovoltaics
3. Autonomous RAID Applications in Solar Photovoltaics
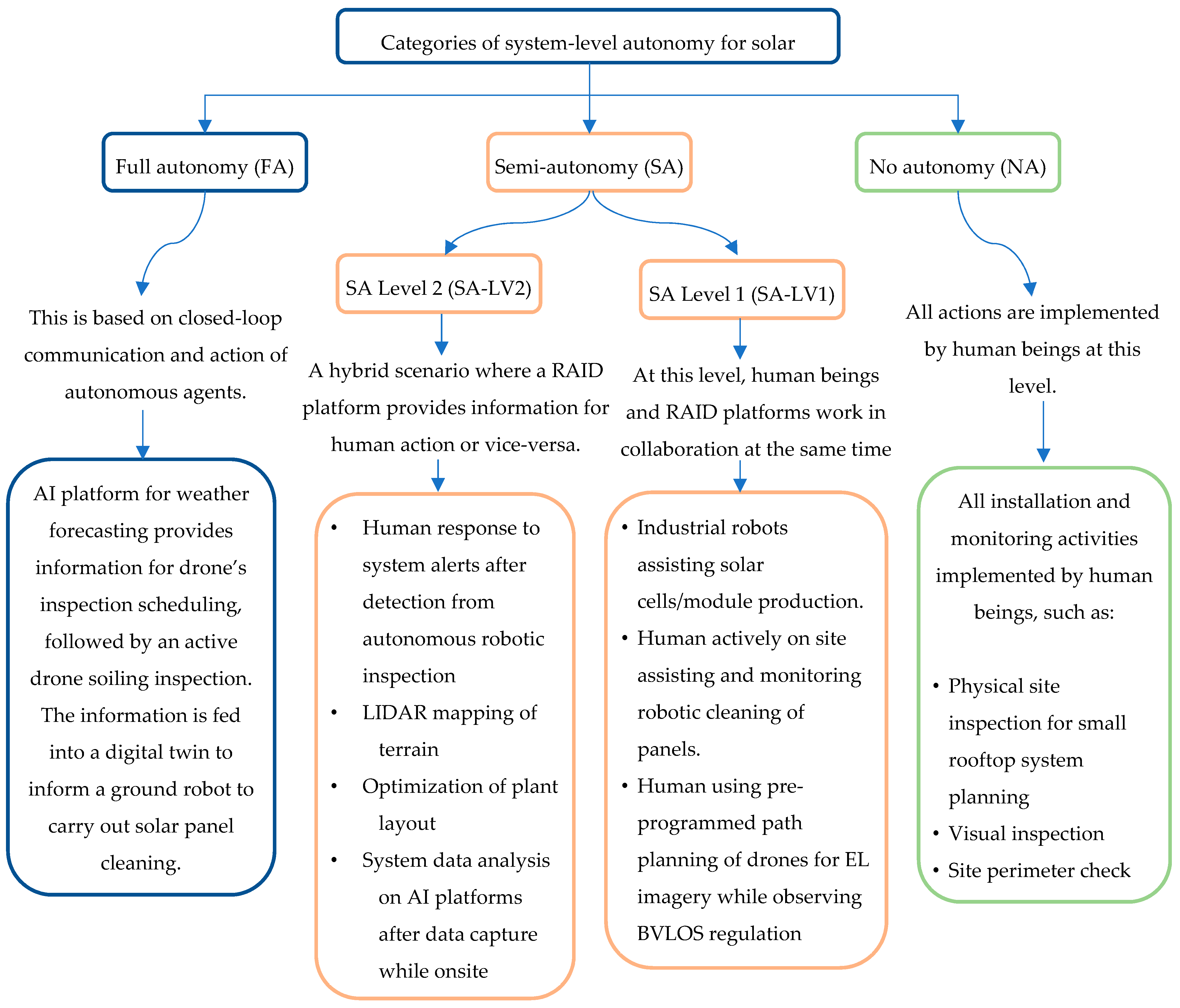
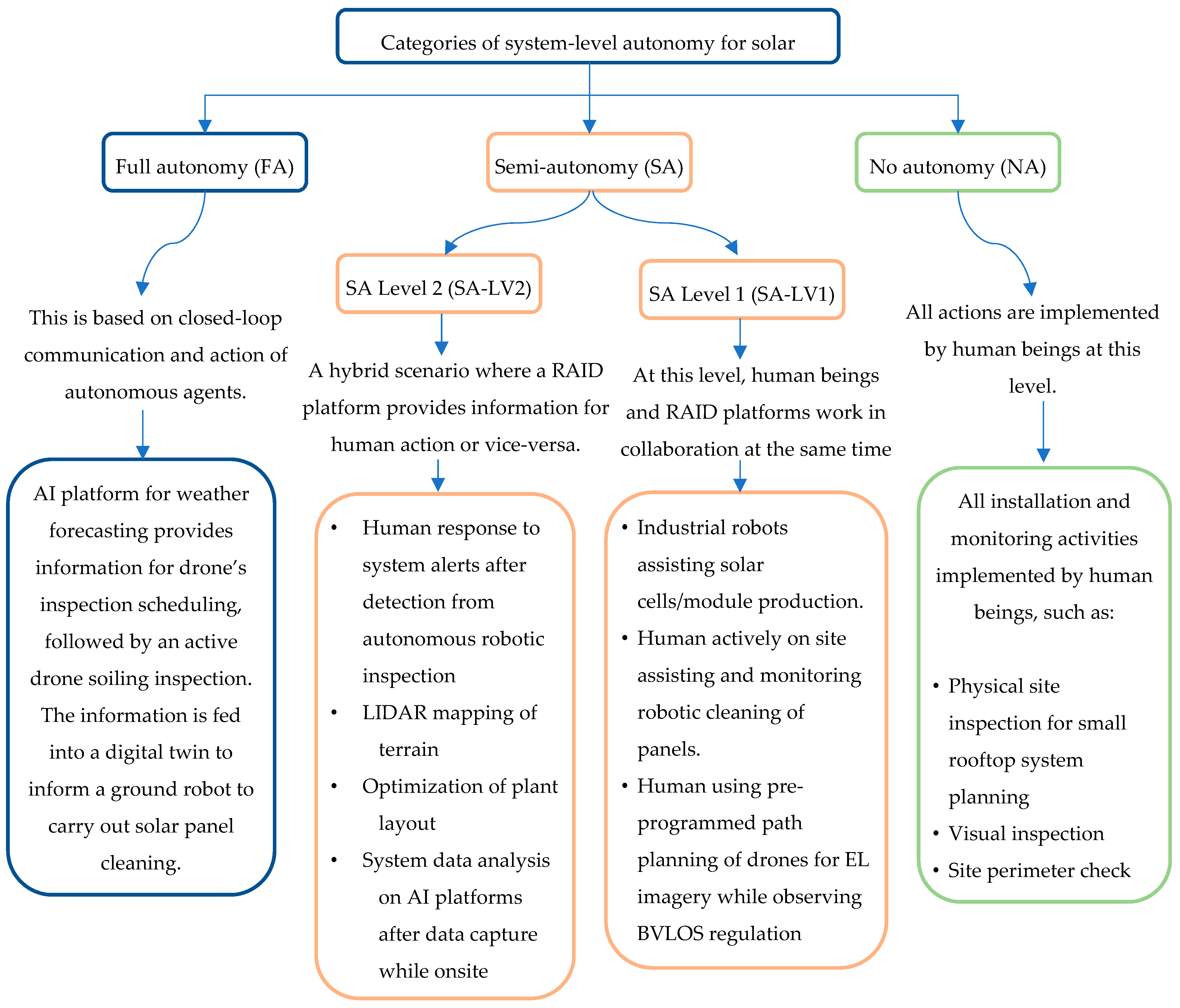
3.1. Autonomy Levels

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAE LEVEL 0 | SAE LEVEL 1 | SAE LEVEL 2 | SAE LEVEL 3 | SAE LEVEL 4 | SAE LEVEL 5 | |
|---|---|---|---|---|---|---|
| What does the human in the driver’s seat have to do? | You are driving whenever these driver support features are engaged—even if your feet are off the pedals and you are not steering | You are not driving when these automated driving features are engaged—even if you are seated in “the driver’s seat” | ||||
| You must constantly supervise these support features; you must steer, brake, or accelerate as needed to maintain safety | When the feature requests you must drive | These automated driving features will not require you to take over driving | ||||
| These are driver support features | These are automated driving features | |||||
| What do the features do? | These features are limited to providing warnings and momentary assistance | These features provide steering OR brake/acceleration support to the driver | These features provide steering AND brake/acceleration support to the driver | These features can drive the vehicle under limited conditions and will not operate unless all required conditions are met | This feature can drive the vehicle under all conditions | |
| Example Features | Automatic emergency braking, blind spot warning, lane departure warning | Lane centering OR adaptive cruise control | Lane centering AND adaptive cruise control at the same time | Traffic jam chauffer | Local driverless taxi, pedals/steering wheel may or may not be installed | Same as level 4, but feature can drive everywhere in all conditions |
3.2. RAID Classification and Application
3.2.1. Robots Classification
- Autonomous Mobile Robots (AMRs): These are robots that are able to move around with the aid of sensors and machine vision. They have onboard processors that allow them to make smart decisions on the move.
- Automated Guided Vehicles (AGVs): These robots rely on pre-programmed paths and are operated only when under full supervision.
- Articulated Robots: This refers to robotic arms used mostly in manufacturing plants. They have different degrees of motion based on the number of joints and coordinates of motion at each joint.
- Humanoids: These robots perform human-centric tasks and are therefore designed with human forms. They are essentially a subset of AMRs.
- Cobots: The term Cobots implies Collaborative Robots. These robots perform tasks alongside or directly with humans. They are designed to significantly reduce arduous tasks for human workers.
- Hybrids: These robots are a combination of any of the classes described above. This is to enable them to perform more complex tasks than the single categories.
3.2.2. Artificial Intelligence (AI) Platforms
- Reactive AI: This type of AI is programmed to only provide a predictable response based on the input/stimuli it receives. This form of AI does not store the input and does not learn with continuous usage.
- Limited memory AI: This level of AI functionality learns from previous use to improve its output or response. Model training under this level can either be prompted by developers or the AI platform pre-built to automatically update the training. An example is the training of computers in playing games.
- Theory of mind: This level of AI functionality not only has memory, but it also begins to interact with human thought and emotions. This is a very high level of human-behaviour mimicking, and an example is Sophia, the humanoid robot created by Hanson robotics in Hong Kong. The fluidity of human nature and emotions, however, makes this very difficult to attain for now.
- Self-awareness: AI at this level would have achieved human-like intelligence and self-awareness. The AI platform would be aware of itself and others’ emotions and needs. There is currently no AI at this level; however, with continuous advancement in technology, this is considered achievable.
3.2.3. Drones (Unmanned Aerial Vehicles)
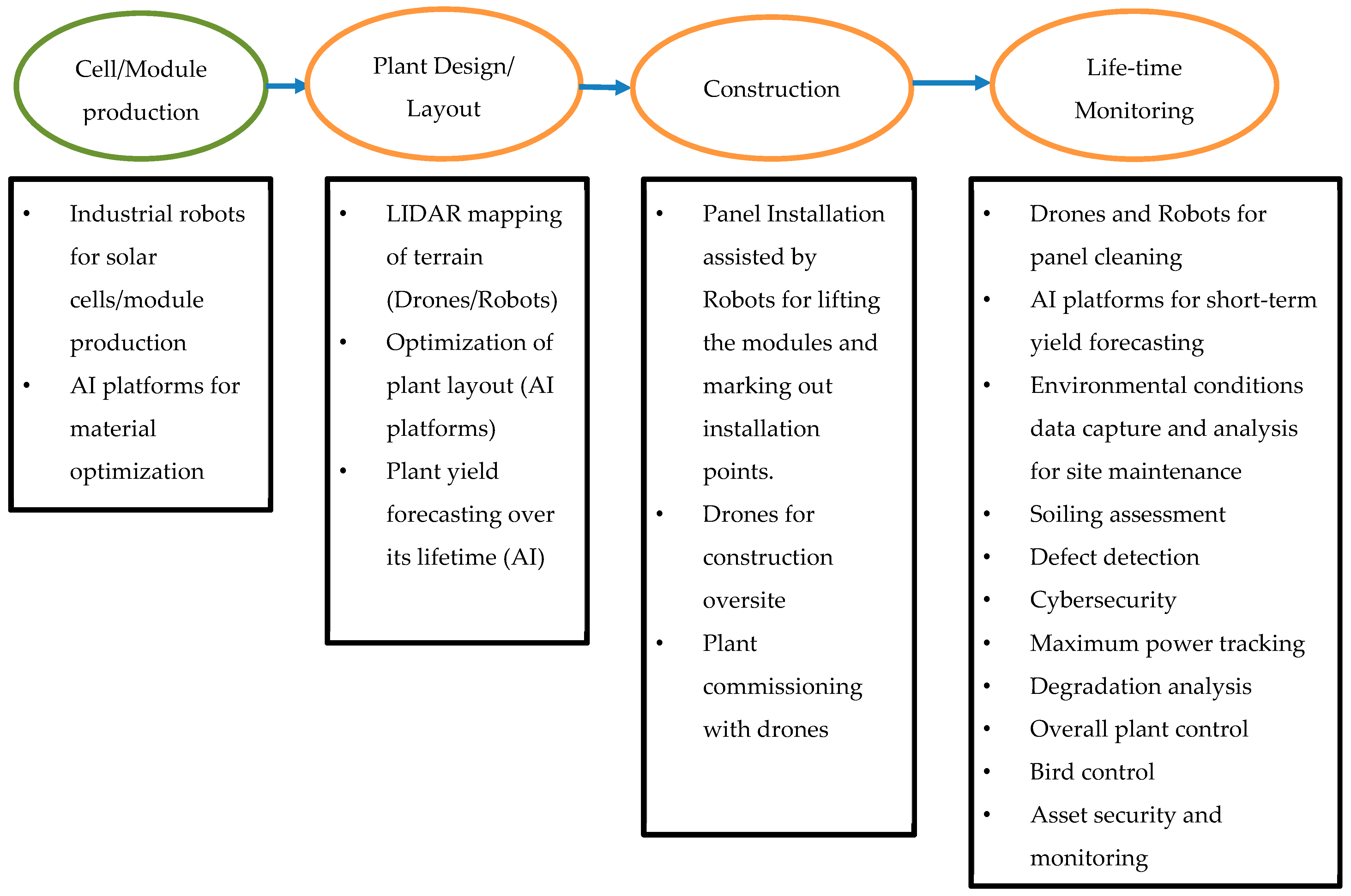
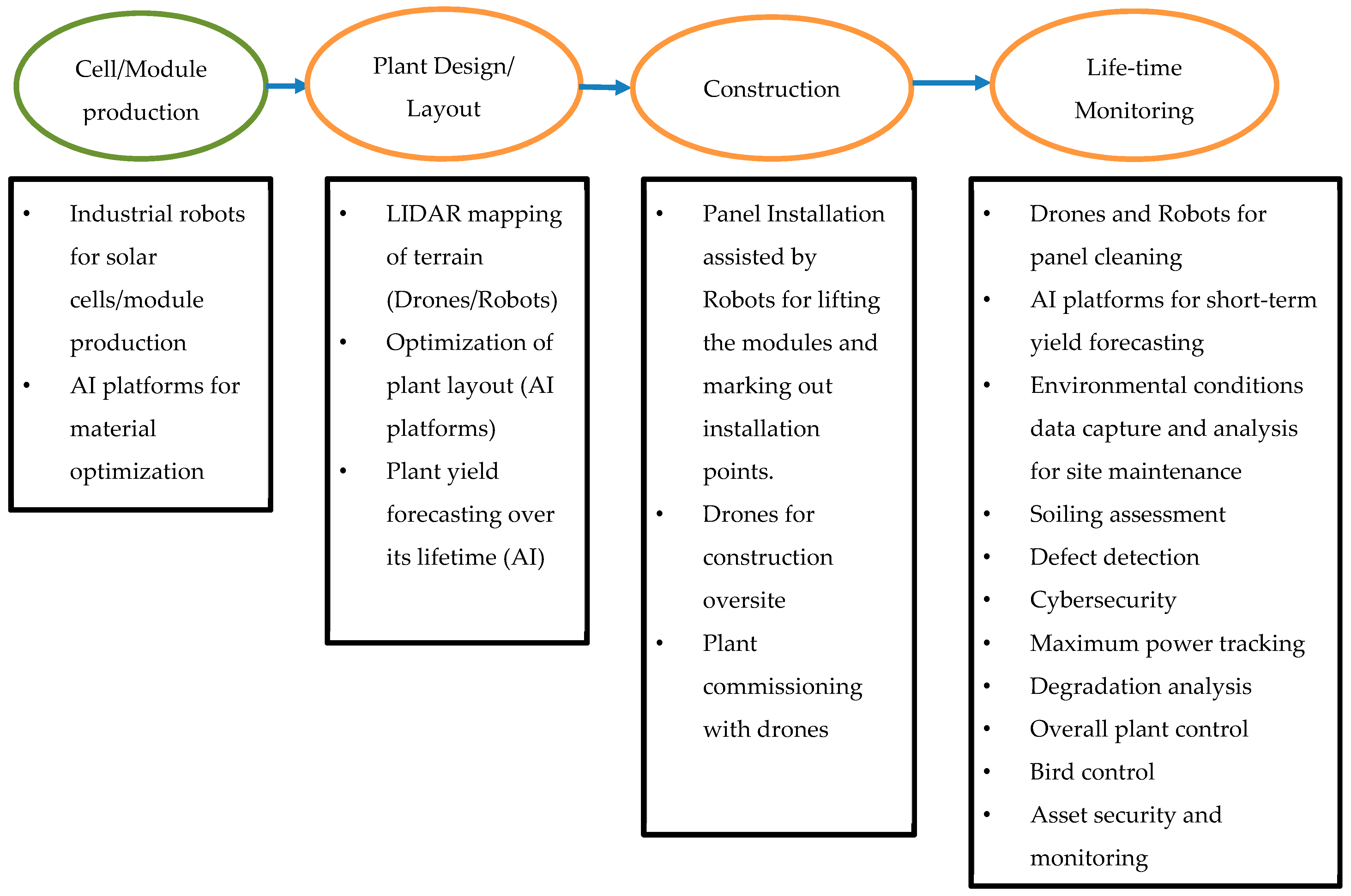
3.3. Specific RAID Applications in Solar Photovoltaics
3.4. Approach/Models to Safe Autonomy
3.5. System-Level Consideration
- Existing regulations for individual platform use: There exist various regulations guiding the use of the RAID devices/platforms in different countries. If carefully followed, a huge proportion of device-level risks can be managed. Thus, there is no need for regulation duplication. However, most of the regulations generalize the implementation aspect and lose the resolution of system integration. This creates a loophole in terms of the responsibility of involved parties when a risk occurs. This is an obvious situation with regards to the solar photovoltaic system integration as various forms of implementation are just evolving.
- Enabling ease of implementation at all levels: Solar PV energy is a renewable energy source that is highly scalable and, at best, highly socially integrable. This means that a Solar PV system of any size can be installed based on the energy demand required. Also, since various means have been achieved to enhance its social appeal and minimize its intrusiveness, it is being installed in various locations, such as residential rooftops, commercial building rooftops, carparks, commercial ground mounts, building-integrated and building-attached systems, floating systems, farmland-integrated and utility-scale locations. Thus, while there are several existing rules guiding application of the RAID devices individually, it is observed that some of the regulations make it impossible for application in some of the areas where the Solar PVs are installed and where the RAID application will be very useful for system developers and monitors. An example is found in the regulations guiding the autonomous use of drones for Solar PV monitoring in densely populated areas such as commercial buildings (malls). While the regulations are generally not in favour of such application, being able to implement autonomous monitoring is also highly beneficial, as it averts the risk of workers always having to climb rooftops (in fact, they may damage the roof sheeting and cause roof sheeting warranty issues) and is cost saving.
- Ensure system of system level assurance: In addition to the device-level regulations that exist, system-level guidance will ascertain a higher level of asset and life protection, thereby boosting investor confidence. This is because, at this level, the impact on the environment and uninvolved persons within the scope of operations will have been adequately considered. This reduces the legal issues and risks associated with the rights of uninvolved persons.
4. Safety in Autonomous RAID Applications
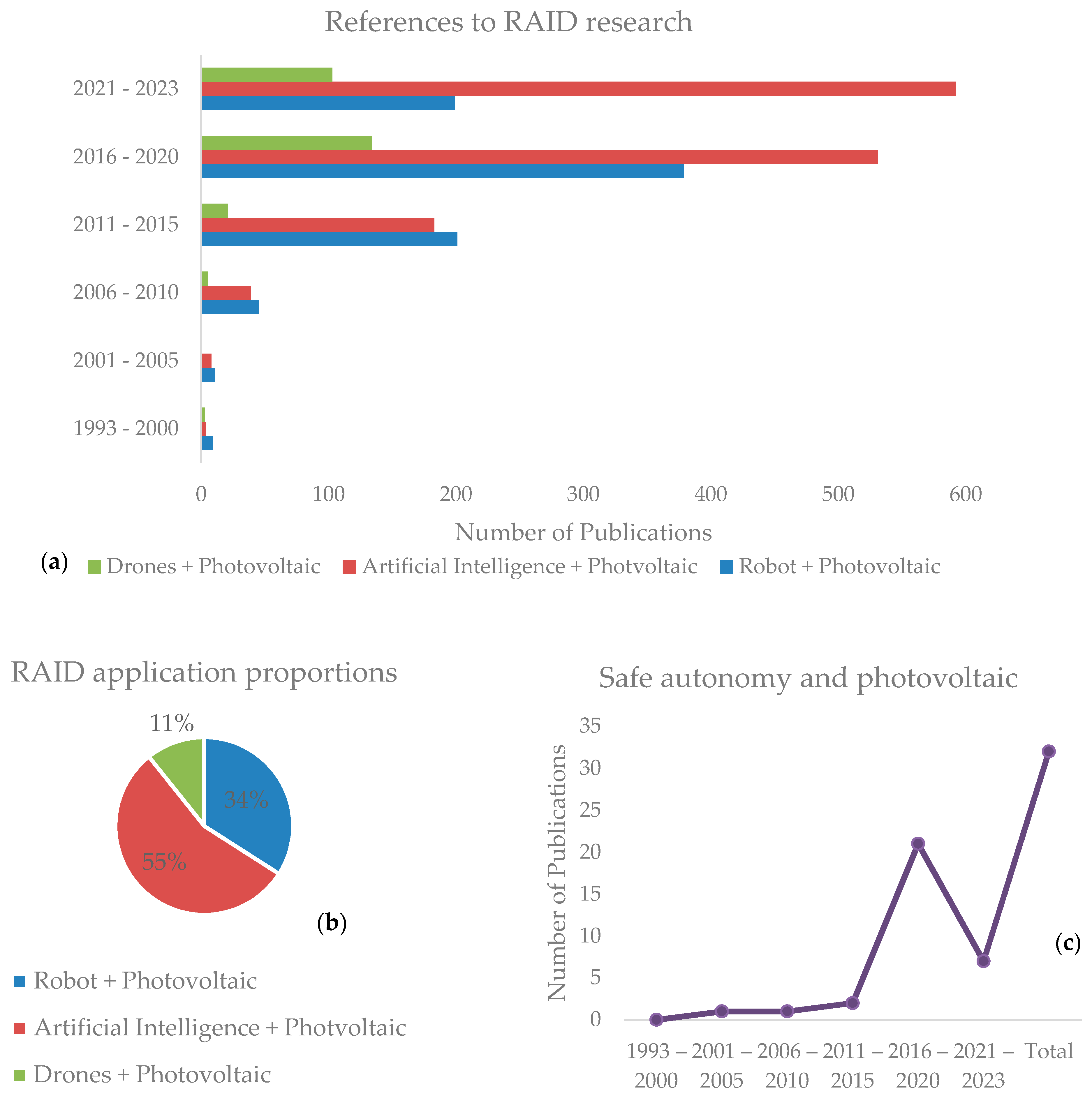
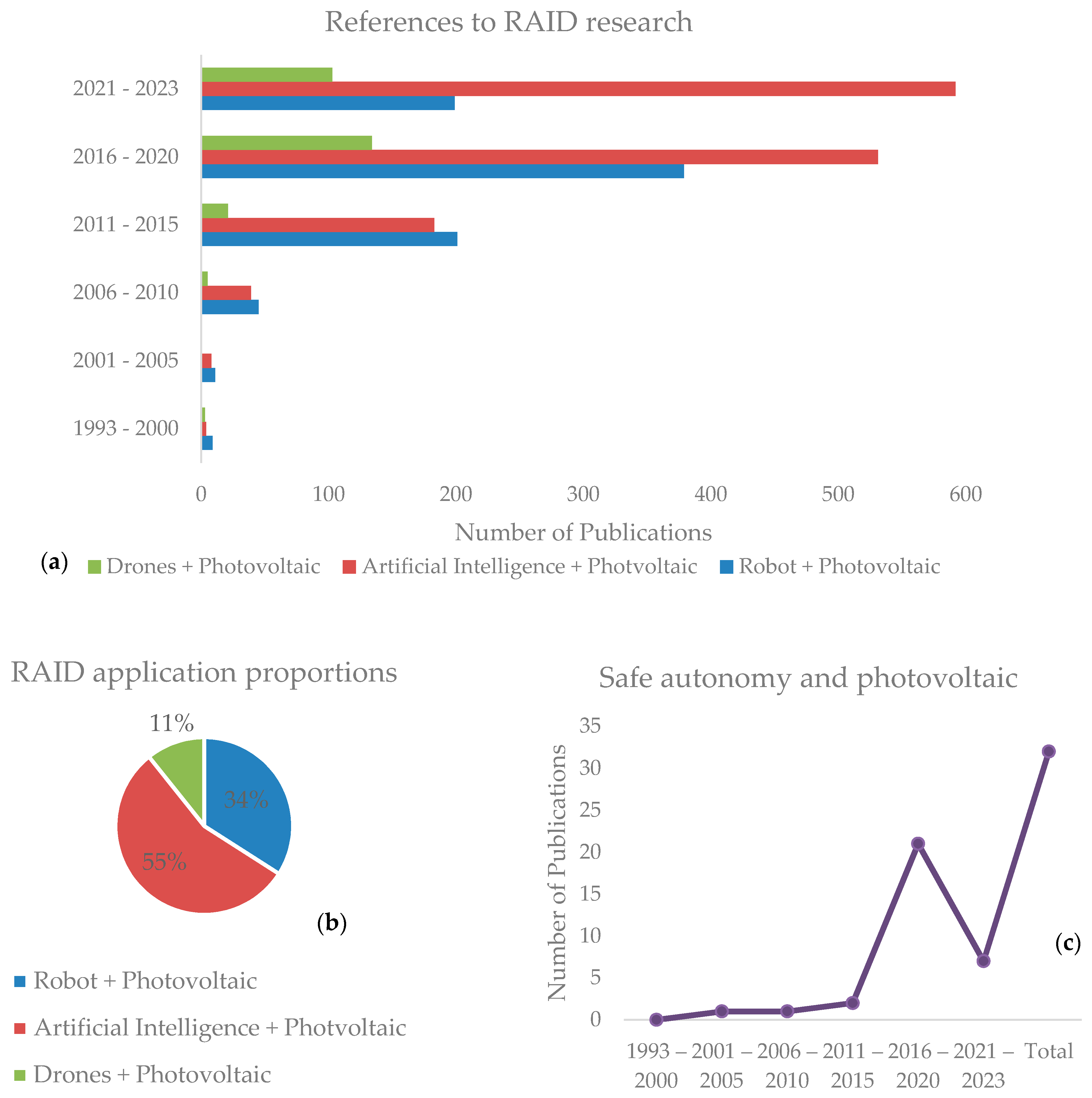
4.1. Research in Solar PV RAID Safety
4.2. Associated Hazards and Risks, with Examples
- Proximity (hazard) when a computer vision-guided robot has its vision compromised by light reflection/glare (cause/trigger) from solar panels during daytime operation. The glare would alter the perceived imagery of the robot, and it could collide (consequence) with any object or human within a short time span if it is unable to instantaneously halt its actions during an operation.
- Terrain separation decreasing (hazard) could exist for faulty path planning or path scheduling (cause) of robots and drones. This leads to collision (consequence 1) of the devices concerned and will in turn cause damage to the asset (consequence 2). In addition, any human on site may be involved in the collision, and injuries may occur (consequence 3).
- Fire hazard (hazard) is imminent for a drone/robot during operation with a damaged battery from over-charging or heating from erratic weather conditions (cause). This can lead to the crash of the drone/robot (consequence 1) and fire on the farm at the crash area, which could in turn affect the whole site (consequence 2).
- Cybersecurity hazards (hazard) also exist where the RAID equipment like a drone can be hacked (cause) by external parties or repurposed by a human controller (cause) to performed illegal operations such as hacking data centres (consequence).
4.2.1. Risk Probability and Severity
4.2.2. Trade-Offs
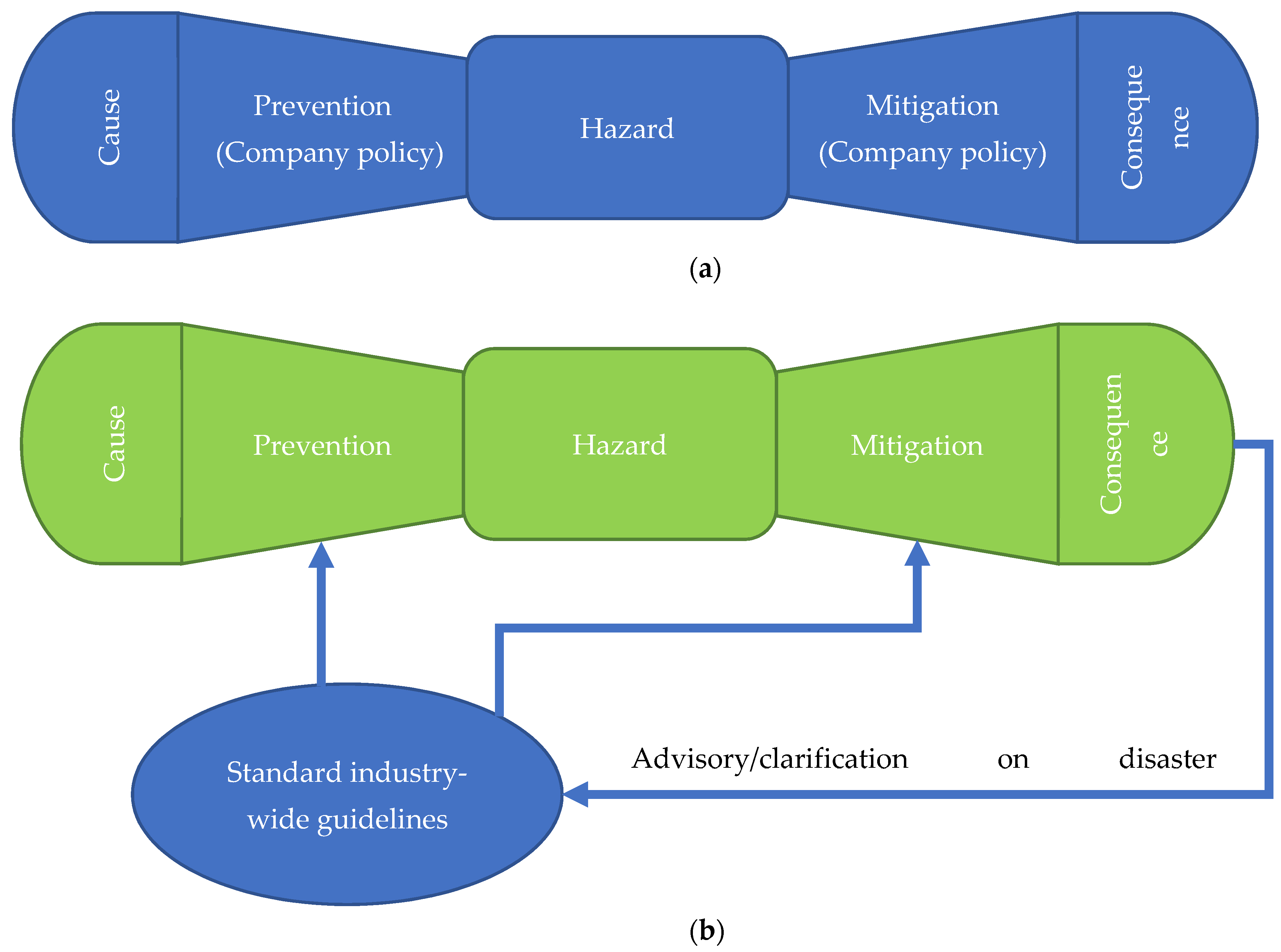
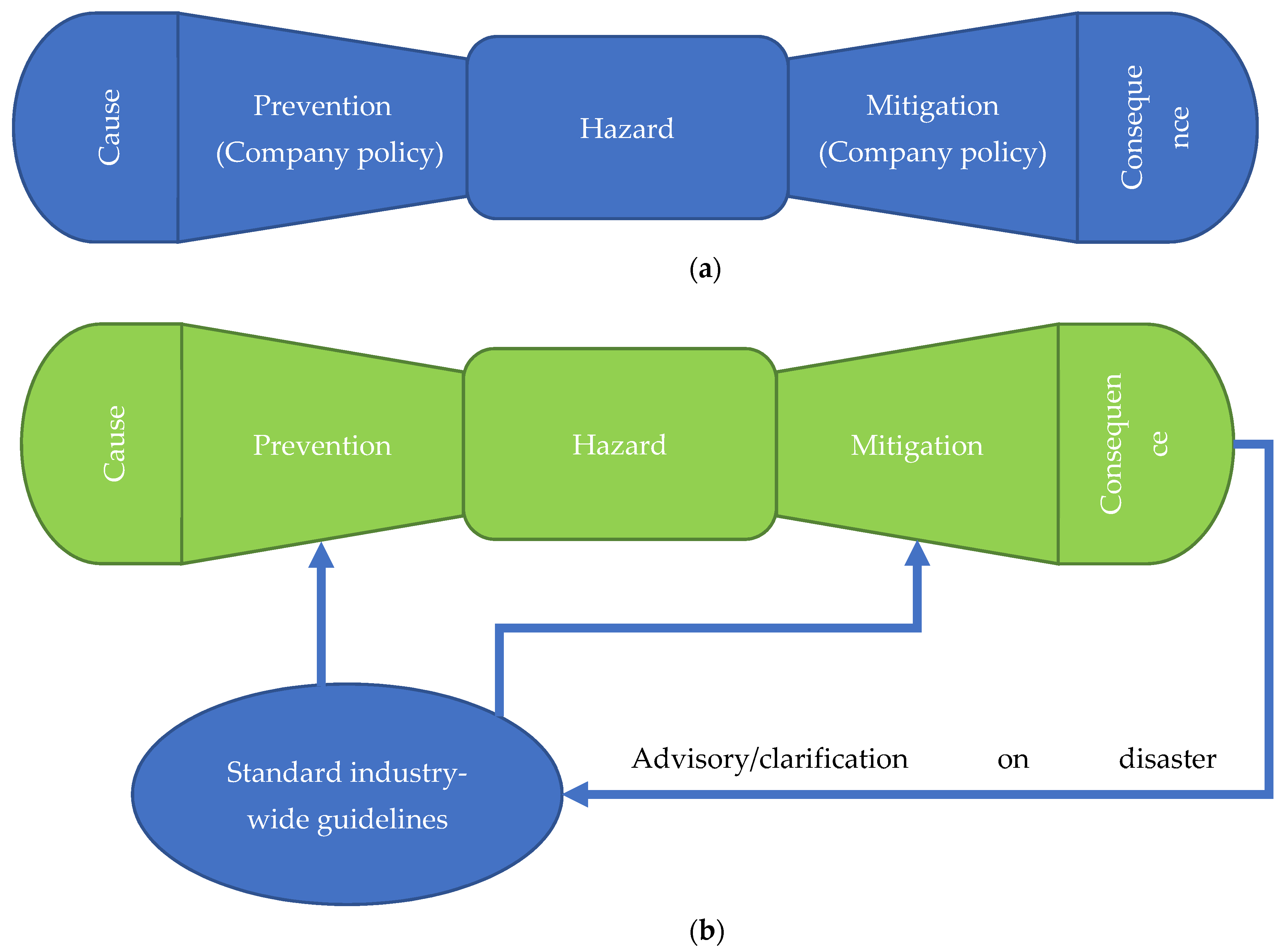
4.3. Proposed Perspective on System Integration
4.4. Potential Challenges and Mitigation
4.5. Safe Autonomy Pillars
- Hazard identification and risk assessment: This forms an essential aspect of ensuring the safe operation of autonomous systems in Solar PV applications. It is crucial to design these systems to identify potential hazards, such as obstacles or adverse environmental conditions, that could potentially impact their operation. Furthermore, a comprehensive risk assessment should be conducted to evaluate the likelihood and consequences of these hazards causing harm to humans or the environment. This enables the development of effective risk mitigation strategies and the incorporation of appropriate safety measures into the system design.
- Safe operation design of autonomous systems: These systems should be designed to operate safely under normal conditions, as well as in abnormal situations. Safety features, such as advanced sensors, robust safety protocols, and fail-safe mechanisms, should be integrated to ensure the system can detect and respond to potential hazards or malfunctions, thereby minimizing risks to humans and the environment.
- Cybersecurity: This is a critical consideration in the design of autonomous systems for Solar PV applications. To maintain the safety and reliability of the system, measures should be implemented to prevent unauthorized access or control. Cyberattacks targeting these systems can compromise their functionality and potentially lead to harmful consequences. Robust cybersecurity measures, including encryption, authentication mechanisms, and intrusion detection systems, should be integrated to protect against such threats.
- Interaction between autonomous systems and human operators/workers: When humans are required to work alongside autonomous systems in Solar PV applications, it is vital to design the system with human–machine interaction in mind. Safety protocols and interfaces should be established to facilitate safe collaboration and communication between humans and autonomous systems, minimizing the risk of accidents or incidents.
- Maintenance and repair procedures: These should also be considered in the design of autonomous systems for Solar PV applications. The systems should be designed for ease of maintenance and repair, with clear guidelines and safety protocols in place. These measures ensure that maintenance or repair activities can be conducted safely, minimizing risks to human workers and preventing potential harm to the environment.
- Environmental impact (EI): EI mitigation is another critical consideration when designing autonomous systems for Solar PV applications. Efforts should be made to minimize the system’s environmental footprint. This can include reducing the use of hazardous materials during production, operation, or disposal phases, as well as implementing measures to minimize waste generation. By prioritizing sustainability and environmental stewardship, autonomous systems can contribute to a cleaner and greener energy ecosystem.
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Morgan, A.A.; Abdi, J.; Syed, M.A.Q.; El Kohen, G.; Barlow, P.; Vizcaychipi, M.P. Robots in Healthcare: A Scoping Review. Curr. Robot. Rep. 2022, 3, 271–280. [Google Scholar] [CrossRef] [PubMed]
- Niestadt, M.; Debyser, A.; Scordamaglia, D.; Pape, M. BRIEFING EPRS|European Parliamentary Research Service; European Parliamentary Research Service: Brussels, Belgium, 2019. [Google Scholar]
- Parmaksiz, O.; Cinar, G. Technology Acceptance among Farmers: Examples of Agricultural Unmanned Aerial Vehicles. Agronomy 2023, 13, 2077. [Google Scholar] [CrossRef]
- Liang, H.; Lee, S.-C.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones 2023, 7, 202. [Google Scholar] [CrossRef]
- Wang, G.; Xie, J.; Wang, S. Application of Artificial Intelligence in Power System Monitoring and Fault Diagnosis. Energies 2023, 16, 5477. [Google Scholar] [CrossRef]
- Arents, J.; Greitans, M. Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing. Appl. Sci. 2022, 12, 937. [Google Scholar] [CrossRef]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; Jesus, L.; Berriel, R.; Paixão, T.M.; Mutz, F.; et al. Self-driving cars: A survey. Expert Syst. Appl. 2021, 165, 113816. [Google Scholar] [CrossRef]
- Attanasio, A.; Scaglioni, B.; De Momi, E.; Fiorini, P.; Valdastri, P. Annual Review of Control, Robotics, and Autonomous Systems Autonomy in Surgical Robotics. Annu. Rev. Control Robot. Auton. Syst. 2021, 4, 651–679. [Google Scholar] [CrossRef]
- Gokool, S.; Mahomed, M.; Kunz, R.; Clulow, A.; Sibanda, M.; Naiken, V.; Chetty, K.; Mabhaudhi, T. Crop Monitoring in Smallholder Farms Using Unmanned Aerial Vehicles to Facilitate Precision Agriculture Practices: A Scoping Review and Bibliometric Analysis. Sustainability 2023, 15, 3557. [Google Scholar] [CrossRef]
- Müller, M.; Müller, T.; Talkhestani, B.A.; Marks, P.; Jazdi, N.; Weyrich, M. Industrial autonomous systems: A survey on definitions, characteristics and abilities. Automatisierungstechnik 2021, 69, 3–13. [Google Scholar] [CrossRef]
- Emergen Research. Artificial Intelligence in Energy Market by Application and By Region, Forecast to 2028; Emergen Research: Surrey, BC, Canada, 2021. [Google Scholar]
- Ramírez, I.S.; Chaparro, J.R.P.; Márquez, F.P.G. Unmanned aerial vehicle integrated real time kinematic in infrared inspection of photovoltaic panels. Measurement 2022, 188, 110536. [Google Scholar] [CrossRef]
- Morando, L.; Recchiuto, C.T.; Calla, J.; Scuteri, P.; Sgorbissa, A. Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection. Drones 2022, 6, 347. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, X.; Gao, Y.; Guo, R.; Zhao, J. Research on Mechanism Design and Kinematic Characteristics of Self-Propelled Photovoltaic Cleaning Robot. Appl. Sci. 2023, 13, 6967. [Google Scholar] [CrossRef]
- Romero, H.F.M.; Rebollo, M.G.; Cardeñoso-Payo, V.; Gómez, V.A.; Plaza, A.R.; Moyo, R.T.; Hernández-Callejo, L. Applications of Artificial Intelligence to Photovoltaic Systems: A Review. Appl. Sci. 2022, 12, 10056. [Google Scholar] [CrossRef]
- Kurukuru, V.S.B.; Haque, A.; Khan, M.A.; Sahoo, S.; Malik, A.; Blaabjerg, F. A Review on Artificial Intelligence Applications for Grid-Connected Solar Photovoltaic Systems. Energies 2021, 14, 4690. [Google Scholar] [CrossRef]
- Kim, E.; Akhtar, M.S.; Yang, O.-B. Designing solar power generation output forecasting methods using time series algorithms. Electr. Power Syst. Res. 2023, 216, 109073. [Google Scholar] [CrossRef]
- Burton, S.; Habli, I.; Lawton, T.; McDermid, J.; Morgan, P.; Porter, Z. Mind the gaps: Assuring the safety of autonomous systems from an engineering, ethical, and legal perspective. Artif. Intell. 2019, 279, 103201. [Google Scholar] [CrossRef]
- Hindriks, F.; Veluwenkamp, H. The risks of autonomous machines: From responsibility gaps to control gaps. Synthese 2023, 201, 21. [Google Scholar] [CrossRef]
- Solar Power Europe. Best Practice Guidelines Maintenance Operation &Maintenance, Version 5.0; Solar Power Europe: Brussels, Belgium, 2021.
- IEC TS 62446-3:2017; Photovoltaic (PV) Systems—Requirements for Testing, Documentation, and Maintenance—Part 3: Photovoltaic Modules and Plants—Outdoor Infrared Thermography. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2017; pp. 1–37.
- NERSA. NERSA Generation-Licensing-and-Registration-Frequently-Asked-Questions; NERSA: Pretoria, South Africa, 2019. [Google Scholar]
- Ofgem. Guidance for Renewable Installations Overview; Ofgem: London, UK, 2021. [Google Scholar]
- Royal Academy of Engineering. Innovation in Autonomous Systems; Royal Academy of Engineering: London, UK, 2015. [Google Scholar]
- Cardoso, R.C.; Kourtis, G.; Dennis, L.A.; Dixon, C.; Farrell, M.; Fisher, M.; Webster, M. A Review of Verification and Validation for Space Autonomous Systems. Curr. Robot. Rep. 2021, 2, 273–283. [Google Scholar] [CrossRef]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Khalid, O.; Hao, G.; Desmond, C.; Macdonald, H.; McAuliffe, F.D.; Dooly, G.; Hu, W. Applications of robotics in floating offshore wind farm operations and maintenance: Literature review and trends. Wind. Energy 2022, 25, 1880–1899. [Google Scholar] [CrossRef]
- Roggi, G.; Niccolai, A.; Grimaccia, F.; Lovera, M. A Computer Vision Line-Tracking Algorithm for Automatic UAV Photovoltaic Plants Monitoring Applications. Energies 2020, 13, 838. [Google Scholar] [CrossRef]
- Niccolai, A.; Grimaccia, F.; Leva, S. Advanced Asset Management Tools in Photovoltaic Plant Monitoring: UAV-Based Digital Mapping. Energies 2019, 12, 4736. [Google Scholar] [CrossRef]
- Kas, K.A.; Johnson, G.K. Using unmanned aerial vehicles and robotics in hazardous locations safely. Process. Saf. Prog. 2020, 39, e12066. [Google Scholar] [CrossRef]
- Iqbal, J.; Al-Zahrani, A.; Alharbi, S.A.; Hashmi, A. Robotics Inspired Renewable Energy Developments: Prospective Opportunities and Challenges. IEEE Access 2019, 7, 174898–174923. [Google Scholar] [CrossRef]
- Martinetti, A.; Chemweno, P.K.; Nizamis, K.; Fosch-Villaronga, E. Redefining Safety in Light of Human-Robot Interaction: A Critical Review of Current Standards and Regulations. Front. Chem. Eng. 2021, 3, 666237. [Google Scholar] [CrossRef]
- Drone Deploy. Phantom 4 Pro V2 Crash with Drone Deploy-No Logs. 2023. Available online: https://forum.dronedeploy.com/t/phantom-4-pro-v2-crash-with-drone-deploy-no-logs/20724 (accessed on 28 February 2024).
- Cognex Corp. Cognex In-Sight® 2D Robot Guidance Plug-in User Guide; Cognex Corp.: Natick, MA, USA, 2018. [Google Scholar]
- Safa, A.; Verbelen, T.; Ocket, I.; Bourdoux, A.; Catthoor, F.; Gielen, G.G.E. Fail-Safe Human Detection for Drones Using a Multi-Modal Curriculum Learning Approach. IEEE Robot. Autom. Lett. 2021, 7, 303–310. [Google Scholar] [CrossRef]
- Naija, M.; Khemiri, R.; Exposito, E. Failsafe Mechanism to Hazard Analysis and Risk Mitigation in Unmanned Aerial Vehicle based on NCES. In Proceedings of the 15th International Conference on Software Technologies, Online, 7–9 July 2020; pp. 220–227. [Google Scholar]
- Cho, D. A Study on a Flight Safe System in Unmanned Aerial Vehicles. Int. J. Appl. Eng. Res. 2018, 13, 7128–7130. [Google Scholar]
- Otani, T.; Itoh, A.; Mizukami, H.; Murakami, M.; Yoshida, S.; Terae, K.; Tanaka, T.; Masaya, K.; Aotake, S.; Funabashi, M.; et al. Agricultural Robot under Solar Panels for Sowing, Pruning, and Harvesting in a Synecoculture Environment. Agriculture 2023, 13, 18. [Google Scholar] [CrossRef]
- Staubli Int. AG. Robotics|Experts in Man and Machine; Staubli Int.: Thessaloniki, Greece, 2022. [Google Scholar]
- ABB Ltd. Efficient Robot-Based Automation for Solar Cell and Module Production Robotics; ABB Ltd.: Zurich, Switzerland, 2009. [Google Scholar]
- Clemenzi, R.A.; Siglin, J.A. Robotic Assembly of Photovoltaic Arrays. U.S. Patent US20190134822, 8 February 2022. [Google Scholar]
- SAE-J3016_201806; Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International: Warrendale, PA, USA, 2018.
- SAE International. Levels of Driving Automation. 2021. Available online: https://www.sae.org/blog/sae-j3016-update#:~:text=With%20a%20taxonomy%20for%20SAE's,and%20their%20operation%20on%20roadways (accessed on 24 March 2023).
- Litman, T.A. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2023. [Google Scholar]
- Synopsys. Available online: https://www.synopsys.com/automotive/autonomous-driving-levels.html (accessed on 22 March 2023).
- Institution of Engineering and Technology. IET Standards Michael Faraday House Six Hills Way Stevenage Hertfordshire SG1 2AY Guide to Implementing Industrial Robots Guide to Implementing Industrial Robots; IET: Hertfordshire, UK, 2018. [Google Scholar]
- Ben-Ari, M.; Mondada, F. Robots and Their Applications. In Elements of Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 1–20. [Google Scholar] [CrossRef]
- World Robotics. Industrial Robots; The International Federation of Robotics: Frankfurt am main, Germany, 2016. [Google Scholar]
- Intel Corp. Types of Robots: How Robotics Technologies Are Shaping Today’s World; Intel Corp.: Santa Clara, CA, USA, 2023. [Google Scholar]
- International Federation of Robotic. Industrial Robots; International Federation of Robotic: Frankfurt am Main, Germany, 2022. [Google Scholar]
- Staretu, I. Classification of industrial robots according to the number of degrees of mobility-structural synthesis and useful configurations. IOP Conf. Ser. Mater. Sci. Eng. 2019, 514, 012023. [Google Scholar] [CrossRef]
- Briot, S.; Khalil, W. Dynamics of Parallel Robots; Springer Science and Business Media LLC: Cham, Switzerland, 2015; ISBN 9781447146636. [Google Scholar]
- Samoili, S.; López Cobo, M.; Gómez, E.; De Prato, G.; Martínez-Plumed, F.; Delipetrev, B.; European Commission; Joint Research Centre. AI Watch: Defining Artificial Intelligence: Towards an Operational Definition and Taxonomy of Artificial Intelligence; EUR 30117 EN; Publications Office of the European Union: Luxembourg, 2020; ISBN 978-92-76-17045-7. [CrossRef]
- van Duin, S.; Bakhshi, N. Artificial Intelligence; Deloitte: Amsterdam, Netherlands, 2018. [Google Scholar]
- Hewlett Packard Ent. What Is Artificial Intelligence (AI)? Available online: https://www.hpe.com/uk/en/what-is/artificial-intelligence.html (accessed on 29 March 2023).
- Khan, H. Types of AI|Different Types of Artificial Intelligence Systems. Available online: https://www.fossguru.com/types-of-ai-different-types-of-artificial-intelligence-systems (accessed on 29 March 2023).
- Ofcom UK. Spectrum for Unmanned Aircraft Systems (UAS); Ofcom UK: London, UK, 2022.
- Uddin, M. Drone 101: A Must-Have Guide for Any Drone Enthusiast; Amazon Kindle: Washington, DC, USA, 2020. [Google Scholar]
- Kakaes, K.; Greenwood, F. Chp1-Drones and Aerial Observation: New Technologies for Property Rights, Human Rights, and Global Development: A Primer Observation; New America: Washington, DC, USA, 2015. [Google Scholar]
- Stewart, M.P.; Martin, S.T. Unmanned Aerial Vehicles; Barrera, N., Ed.; Nova Science: Hauppauge, NY, USA, 2021. [Google Scholar]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. In The Future of Drone Use; TMC Asser Press: The Hague, The Netherlands, 2016; pp. 21–45. [Google Scholar] [CrossRef]
- Aghaei, M.; Leva, S.; Grimaccia, F. PV Power Plant Inspection by Image Mosaicing Techniques For IR-Time Images. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016. [Google Scholar]
- Cerra, D.; Ji, C.; Heiden, U. Solar panels area estimation using the spaceborne imaging spectrometer desis: Outperforming multispectral sensors. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 1, 9–14. [Google Scholar] [CrossRef]
- European Commission. EU AI Proposed Regulation Risk Based; European Commission: Brussels, Belgium, 2021. [Google Scholar]
- Haugen, S.; Barros, A.; van Gulijk, C.; Kongsvik, T.; Vinnem, J.E. Safety and Reliability: Safe Societies in a Changing World. In Proceedings of the 28th International European Safety and Reliability Conference (ESREL 2018), Trondheim, Norway, 11–21 June 2018. [Google Scholar]
- Zaki, O.; Dunnigan, M.; Robu, V.; Flynn, D. Reliability and Safety of Autonomous Systems Based on Semantic Modelling for Self-Certification. Robotics 2021, 10, 10. [Google Scholar] [CrossRef]
- Fisher, M.; Collins, E.; Dennis, L.; Luckcuck, M.; Webster, M.; Jump, M.; Page, V.; Patchett, C.; Dinmohammadi, F.; Flynn, D.; et al. Verifiable Self-Certifying Autonomous Systems. In Proceedings of the 2018 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW), Memphis, TN, USA, 15–18 October 2018; pp. 341–348. [Google Scholar]
- Kunifuji, T. Safety Technologies in Autonomous Decentralized Railway Control System. In Proceedings of the 2017 IEEE 13th International Symposium on Autonomous Decentralized System (ISADS), Bangkok, Thailand, 22–24 March 2017; pp. 137–142. [Google Scholar]
- Vistbakka, I.; Troubitsyna, E.; Majd, A. Multi-Layered Safety Architecture of Autonomous Systems: Formalising Coordination Perspective. In Proceedings of the 2019 IEEE 19th International Symposium on High Assurance Systems Engineering (HASE), Hangzhou, China, 3–5 January 2019; pp. 58–65. [Google Scholar]
- Hagele, G.; Soffker, D. Safety unit-based safe behavior assurance for autonomous and semi-autonomous aerial systems: Requirements, concept, and simulation results. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1546–1551. [Google Scholar]
- Spislaender, M.; Saglietti, F. Evidence-Based Verification of Safety Properties Concerning the Cooperation of Autonomous Agents. In Proceedings of the 2018 44th Euromicro Conference on Software Engineering and Advanced Applications (SEAA), Prague, Czech Republic, 29–31 August 2018; pp. 81–88. [Google Scholar]
- Tadewos, T.G.; Shamgah, L.; Karimoddini, A. Automatic Safe Behaviour Tree Synthesis for Autonomous Agents. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 2776–2781. [Google Scholar]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events. Saf. Sci. 2019, 116, 33–44. [Google Scholar] [CrossRef]
- Hawkins, R.; Paterson, C.; Picardi, C.; Jia, Y.; Calinescu, R.; Habli, I. Guidance on the Assurance of Machine Learning in Autonomous Systems (AMLAS). arXiv 2021, arXiv:2102.01564. [Google Scholar]
- Picardi, C.; Hawkins, R.; Paterson, C.; Habli, I. Transfer Assurance for Machine Learning in Autonomous Systems. In Proceedings of the Workshop on Artificial Intelligence Safety (SafeAI), Washington, DC, USA, 13–14 February 2023. [Google Scholar]
- Hawkins, R.; Osborne, M.; Parsons, M.; Nicholson, M.; McDermid, J.; Habli, I. Guidance on the Safety Assurance of Autonomous Systems in Complex Environments (SACE). arXiv 2022, arXiv:2208.00853. [Google Scholar]
- Defence Science and Technology Laboratory. Assurance of Artificial Intelligence and Autonomous Systems A Dstl Biscuit Book; Defence Science and Technology Laboratory: London, UK, 2021. [Google Scholar]
- Leslie, D. Understanding Artificial Intelligence Ethics and Safety. arXiv 2019, arXiv:1906.05684. [Google Scholar] [CrossRef]
- Web of Science. Data Analysed Are Derived from ClarivateTM (Web of ScienceTM). © Clarivate 202___. All Rights Reserved. Available online: http://webofscience.com (accessed on 10 April 2023).
- Bensaci, C.; Zennir, Y.; Pomorski, D.; Innal, F.; Liu, Y.; Tolba, C. STPA and Bowtie risk analysis study for centralized and hierarchical control architectures comparison. Alex. Eng. J. 2020, 59, 3799–3816. [Google Scholar] [CrossRef]
- Malm, T.; Tiusanen, R.; Heikkilä, E.; Sarsama, J. Safety risk sources of autonomous mobile machines. Open Eng. 2022, 12, 977–990. [Google Scholar] [CrossRef]
- Sanderson, C.; Schleiger, E.; Douglas, D.; Kuhnert, P.; Lu, Q. Resolving Ethics Trade-Offs in Implementing Responsible AI. arXiv 2024, arXiv:2401.08103. [Google Scholar]
- Shambo, G. Top 5 Challenges of Solar O&M and How Drones Will Solve Them—The Drone Life. Available online: https://thedronelifenj.com/solar-operation-maintenance/ (accessed on 28 February 2024).
- National Engineering Policy Centre; Royal Academy of Engineering. Safety and Ethics of Autonomous Systems Project Overview; Royal Academy of Engineering: London, UK, 2020. [Google Scholar]
- Wong, A. The Laws and Regulation of AI and Autonomous Systems. In IFIP Advances in Information and Communication Technology; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2020; Volume 555, pp. 38–54. [Google Scholar] [CrossRef]
- Wang, N.; Mutzner, N.; Blanchet, K. Societal acceptance of urban drones: A scoping literature review. Technol. Soc. 2023, 75, 102377. [Google Scholar] [CrossRef]
| Robots | AI | Drones |
|---|---|---|
| Inspection | Maximum power point tracking | Site inspection before system design |
| Cleaning | Plant yield forecasting | Construction monitoring |
| Ribbon disconnection failure detection | Parameter estimation in modelling | Site commissioning |
| Panel installation | Defect detection | Module maintenance inspections |
| Industrial production of solar cells/modules | System design | Thermal imagery assessment |
| Thermal imaging | Model optimization | PV transmission lines inspection |
| Bird control | Solar plant control | Shading assessment |
| Carrying payloads for solar farm inspection | Data analytics | Asset security monitoring |
| Plant maintenance Cybersecurity | Solar module cleaning | |
| Cell material optimization Embedded system control of robots and drones Fault detection |
| Reference | Model Name/Approach Type | Methodology Description | Domain/Industry |
|---|---|---|---|
| [64] | Risk level | 4 levels of risk in AI in general and regulation to ensure minimal risk | AI platforms |
| [65] | Risk based regulation and certification | 12 years empirical data in Norway for clarification of human and autonomous systems role to propose security and risk-based regulation | All autonomous transport systems |
| [66] | Self-diagnostics via semantic modelling | Runtime verification and certification of autonomous systems to prevent hardware failure within any operational condition or environment | AI + robotic platforms |
| [67] | Self-certification | In situ verification, validation, and certification of runtime operations with continuous modelling of environment | AI + robotic platforms |
| [68] | Subsystem data verification/validation | Provides a model for detecting subsystems fault via quality and delay of exchanged data from the real-time data field | AI (railway system) |
| [69] | Self-optimization | Providing multi-layered strategy for reorganization and flight plan for swarm of drones through its navigation control centre (NCC) | AI + swarm of drones |
| [70] | Environmental risk assessment | Simulation validation by integrating a safety unit consisting of a safety unit that incorporates external environment sensory and fallback layer | UAVs |
| [71] | behavioural assessment/self-verification | Software based analysis of system behaviour using unrestricted extended finite state machines approach | Multipurpose systems verification |
| [72] | behavioural assessment/self-verification | Use of behavioural tree and differential logic to verify system operation and inform decision process | Multipurpose autonomous agents |
| [73] | Risk assessment | Hierarchical task analysis for collision avoidance systems. Human Reliability Analysis (HRA) is used to identify and assess human-related errors in autonomous systems oversight, which can lead to developing management strategies | Autonomous vehicles/transport |
| [74] | ML safety assurance | Provided a six-stage closed-loop safety assurance model for any platform using machine learning. It covers all aspects of ML assurance, verification, and deployment | Any platform using Machine learning |
| [75] | ML safety assurance | This model provided upgrade to Hawkins, R. et al. (2021) for real-time ML safety verification and deployment | Any platform using Machine learning |
| [76] | Safety Assurance | Provides a comprehensive model for safety assurance of autonomous systems in complex environments | All autonomous systems |
| [77] | Safety Assurance | Provides comprehensive guideline for autonomous systems integration from algorithm level to system-of-systems integration. Also provides broad guidelines on where responsibility lies in cases of faults or anomaly behaviour (either the human supervisor or actual autonomous system) | All autonomous systems |
| [78] | Reliability and risk-based assessment | Detailed information about autonomous systems, and various aspects to be considered for safety and system assurance | All autonomous systems |
| Causes/Triggers | Hazard | Consequences |
|---|---|---|
| Electromagnetic interference affecting RAID operations. | Close proximity to human, solar module, or other equipment, such as weather monitoring stations and IoT devices | Destruction of solar module |
| Loss of GPS signal | Terrain separation decreasing | Destruction of equipment and IoT devices |
| Accuracy of prediction | Potential battery fires from robots, drones, and other monitoring devices | Loss of data/data collection gaps |
| Periodicity of data and prediction update | Fire | Injuries (mild or severe) |
| Faulty planning | Incursion into forbidden zone | Potential negative impact on wildlife and biodiversity in the region |
| System training procedure and unexpected interactions during real-time operation (especially for machine vision applications) | Ground damage | Asset loss from fire |
| Unauthorized hacking and control of drones or robots | Crash/breakdown during operation for robots and drones | Crashes and asset destruction |
| Unexpected human interference or other emergency situations | Electromagnetic interference | Malfunctioning of IoT and other electronics in the vicinity |
| Human error | Environmental hazards such as adverse weather conditions | Disruption of automated analytics |
| Control error Reflection of light off solar panels and other equipment on site | Water ingress/high humidity during operations/storage | Insufficient data for continuous and valid decision making (either autonomous/manual) |
| Mechanical failure | Falling | Illegal use of device/platform |
| Time pressure | Noise | Major disruption of airplane navigation |
| Environmental sources | Unauthorized usage/access | Disruption of drones’ or robots’ navigation |
| Power system failures or malfunctions | Cybersecurity | Dropping payloads on people |
| Improper assembly or installation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olayiwola, O.; Elsden, M.; Dhimish, M. Robotics, Artificial Intelligence, and Drones in Solar Photovoltaic Energy Applications—Safe Autonomy Perspective. Safety 2024, 10, 32. https://doi.org/10.3390/safety10010032
Olayiwola O, Elsden M, Dhimish M. Robotics, Artificial Intelligence, and Drones in Solar Photovoltaic Energy Applications—Safe Autonomy Perspective. Safety. 2024; 10(1):32. https://doi.org/10.3390/safety10010032
Chicago/Turabian StyleOlayiwola, Olufemi, Miles Elsden, and Mahmoud Dhimish. 2024. "Robotics, Artificial Intelligence, and Drones in Solar Photovoltaic Energy Applications—Safe Autonomy Perspective" Safety 10, no. 1: 32. https://doi.org/10.3390/safety10010032
APA StyleOlayiwola, O., Elsden, M., & Dhimish, M. (2024). Robotics, Artificial Intelligence, and Drones in Solar Photovoltaic Energy Applications—Safe Autonomy Perspective. Safety, 10(1), 32. https://doi.org/10.3390/safety10010032