1. Introduction
In recent decades, there have been rapid advancements in the field of three-dimensional (3D) scanning, with applications in product inspection, reverse engineering, medical research, archeology, and construction of urban environment scenes [
1,
2,
3,
4,
5,
6]. Data collected from 3D scanners are used to generate 3D model reconstructions of an object of interest that can be used to evaluate geometric or dimensional object quality [
4,
7] and to quantify morphological changes [
8], including mechanical wear in biomaterials [
9,
10,
11]. Such quantification requires the registration of two separate 3D models. Registration is the process of spatially aligning two volumetric objects by transforming the objects into a common reference system [
5], thus permitting the direct comparison of the superimposed 3D model surfaces and volumes. For this reason, accurate model registration is critical to measuring morphological differences between 3D scanned objects.
A standard step in 3D model registration is feature matching using maximum overlap techniques [
5,
12]. Maximum overlap aligns two 3D models by finding the optimal transformation between features on a reference and target 3D model and is most commonly achieved through Iterative Closest Point (ICP) algorithms [
7,
13] or variants of ICP [
14,
15]. These algorithms are generally applied to the entire 3D model geometry, such as when analyzing tolerances in quality part inspection [
2]. However, there are drawbacks to selecting the entire 3D model geometry when detecting changes in localized morphology at multiple timepoints (e.g., mechanical wear and degradation), since these changes can create natural variations between the reference and target 3D models that can skew the mapping functions and cause registration errors [
8].
An alternative to selecting the entire 3D model geometry when optimizing object registration is to instead select only a subset of the 3D model that contains distinct geometric features that are unaltered over time [
12,
16]. These unaltered regions can be used to optimize the mapping functions between the reference and target 3D models, and then, the optimized transformation can be applied to the entire object. This allows any altered regions between the target and reference objects to not influence 3D model registration and ultimately permits any real morphological differences between objects to be accurately quantified. Many studies have used this approach for multi-temporal 3D model registration by selecting a wide variety of features. These features have consisted of either intrinsic features (natural to the object) [
8,
9,
11,
17] or artificial features (intentionally placed marker) [
4,
18,
19]. For example, Valigi et al. evaluated wear in an artificial knee by selecting unworn portions of a tibial component to register knee models that were generated at different time points (i.e., pre-wear and post-wear) [
11]. More recently, we measured in vitro fibrocartilage wear in the human knee by selecting artificial features fastened to the tibia bone to register 3D models before and after joint loading to simulate pre- and post-wear time points [
19]. The accurate application of this common registration method is dependent on the local artificial or intrinsic features selected by the operator to calculate the registration transform, yet there are limited guidelines for selecting these features. This lack of guidance has resulted in wide variability in the sizes and shapes of features used to register 3D models. For example, studies by Hawryluk et al. and Verhoeven et al. used intrinsic features that were approximately 30–70% the total object surface area [
8,
17], while Helle et al. and Seminati et al. used artificial features that were roughly 100% and 1% the size of the object surface area, respectively [
4,
18]. Furthermore, planar geometry of selected features is not well understood. While Yao et al. determined that using planar features instead of linear features for registration increased registration performance by nearly 50% [
20], the number of orthogonal planes necessary to optimize the registration was not specified. Therefore, there is a lack in current understanding for how selected feature geometry (e.g., size and shape) influences overall registration accuracy. This information is needed to ensure the quality and reproducibility of morphological changes measured from 3D models.
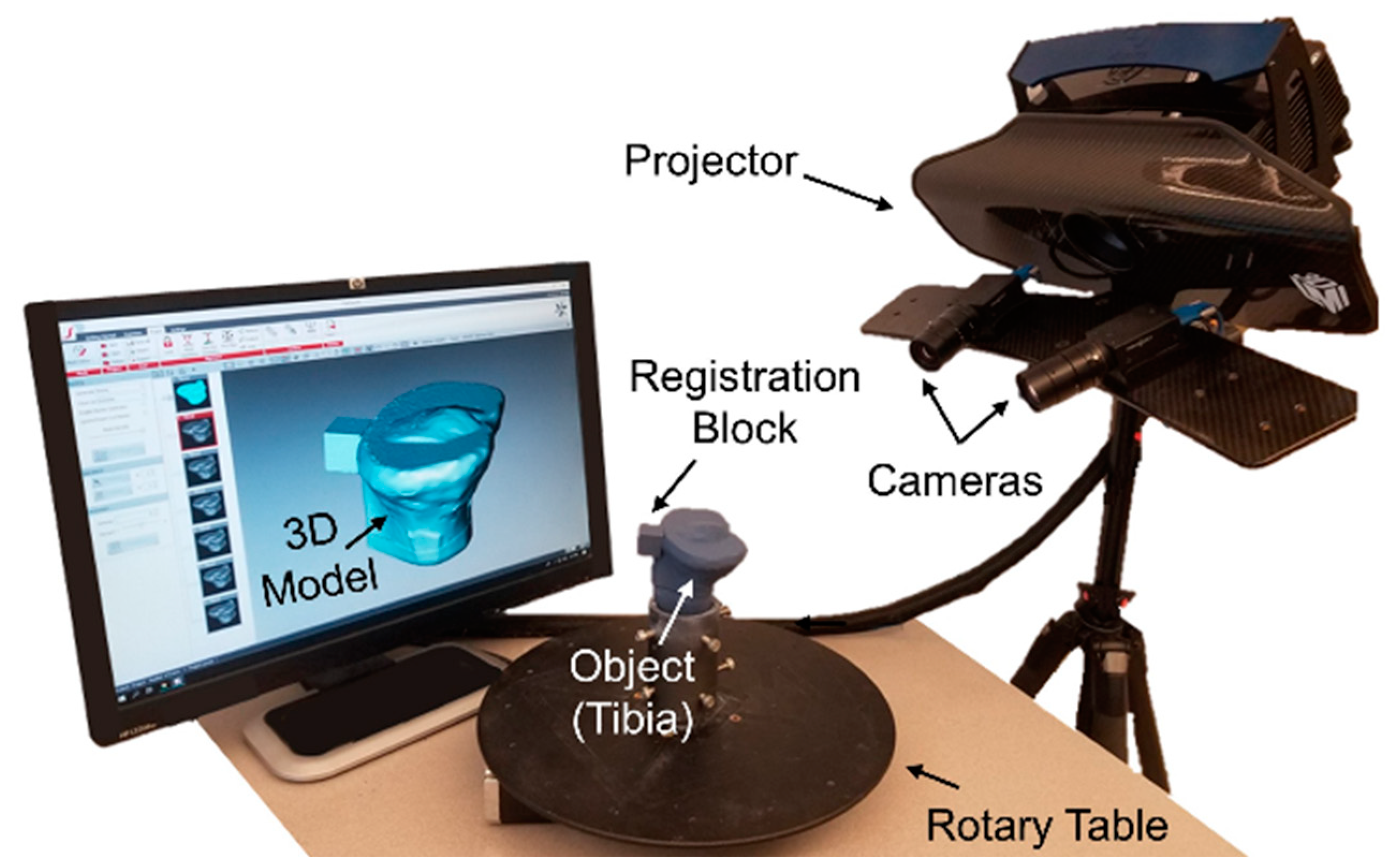
The objective of this study was to determine practical guidelines for selecting object features when registering 3D models at different time points (multi-temporal) by measuring the effect of selected feature geometry on overall registration accuracy. We conducted this analysis using simple cubic registration blocks to register complex 3D models of a tibia bone replica that we acquired at multiple time points with 3D scanning.
3. Results
Average registration error on the tibial plateau surface was significantly influenced by the registration block size (
p = 0.006). The lowest average error of 5.8 ± 3.4 µm was achieved using the largest block size with errors nearly 40x lower than that of the smallest block (
p = 0.007) and 14x lower than the medium block (
p = 0.492) (
Figure 5a;
Table 1). Moreover, the number of geometric planes selected for registration influenced the registration error on the tibial surface (
p = 0.004). With only one plane selected, error was 55–75% greater than all other planar configurations (
Figure 5b;
p < 0.05). A significant interaction existed between the selected number of planes and the registration block size, where increasing the number of planes resulted in lower registration errors in larger block sizes (
p = 0.013).
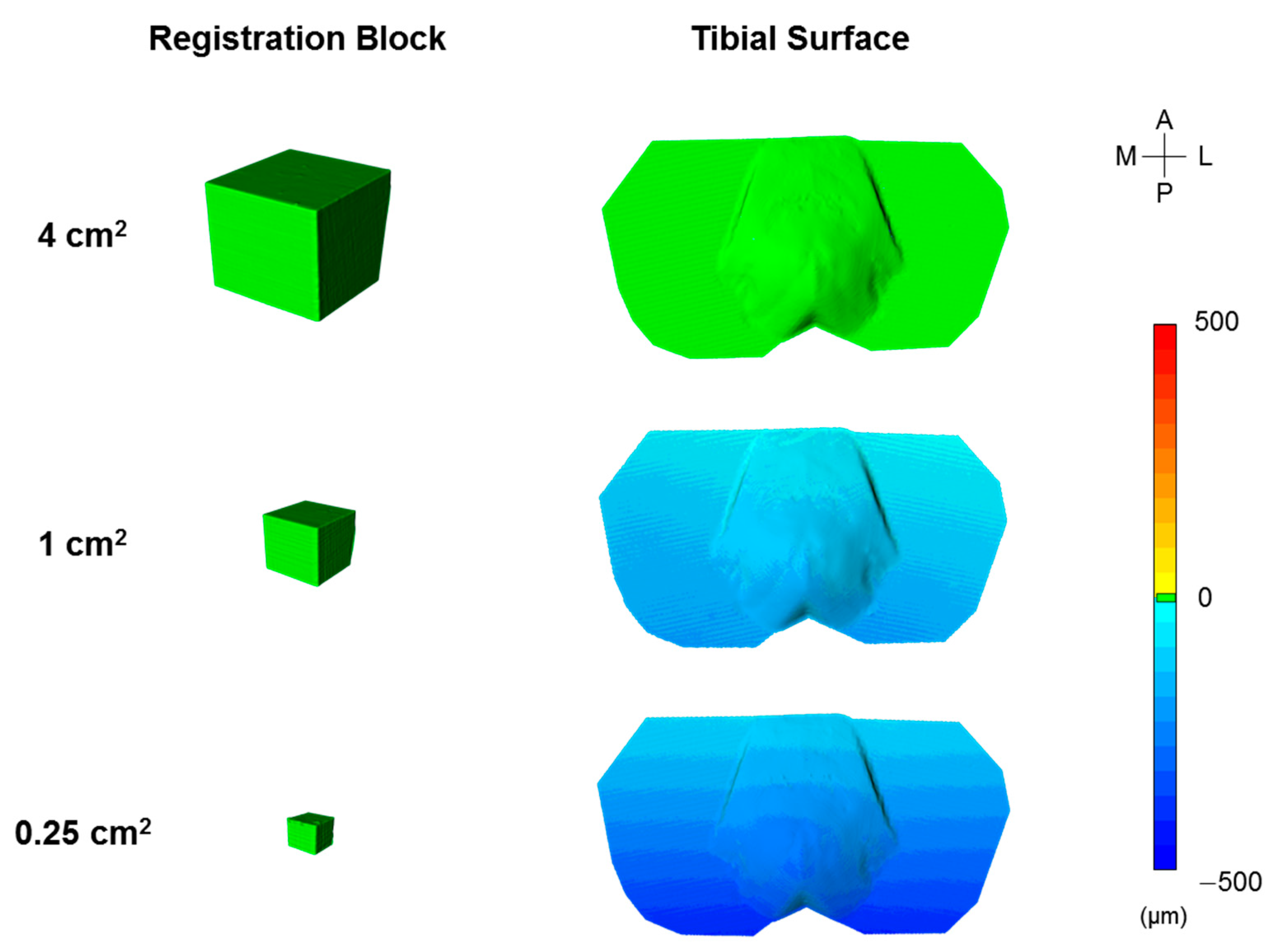
Qualitatively, the surface variations on the tibial plateau surface of the registered models were greater when using the smaller registration blocks, with a higher concentration of variation in the posterior aspects of the tibial surface (
Figure 6; dark blue). The surface variation on the surfaces of the registration markers themselves were relatively consistent (
Figure 6; green cubes), and quantitatively, the registration errors on the surfaces of the medium (9.1 ± 3.9 μm) and small (12.4 ± 1.4 μm) registration markers were not significantly different (
p = 0.38). However, the registration error on the surface of the large (3.0 ± 1.6 μm) registration markers was significantly less than all other marker sizes (
p < 0.05).
4. Discussion
The field of 3D scanning technology is rapidly advancing with numerous applications, yet accurate 3D model registration for certain applications remains a challenge (e.g., wear analysis). The goal of this study was to determine guidelines for accurate and robust model registration with 3D scanned objects. To the best of our knowledge, this is the first study to provide such guidelines.
A key finding from this study was that registration accuracy was dependent on the size and selected features (planes) of the registration block (
Figure 5;
p < 0.05). When using the largest block (CSA = 4 cm
2) with two planar features, our registration error was 4.8 ± 0.9 µm (
Table 1). As the size of the block decreased, a higher error propagated towards the posterior aspect of the tibial plateau surface away from the registration block (
Figure 6; tibial surface, dark blue). This indicates that the surface area of the smaller blocks is insufficient to develop the transformation required to accurately register the whole reference and whole target models. Interestingly, the surface variations on the surfaces of the smaller registration blocks were relatively small (12.4 ± 1.4 μm). This relatively small error could lead to a false sense of security if using small artificial features to register objects, since the artificial features themselves would appear accurately registered, while the object of interest that is being analyzed would likely have poor registration accuracy. When determining the number of surface features (planes) that should be selected on the registration block to minimize error, we found a significant reduction in error when increasing the number of selected orthogonal planes from 1 to 2, with error plateauing when more planes were selected (
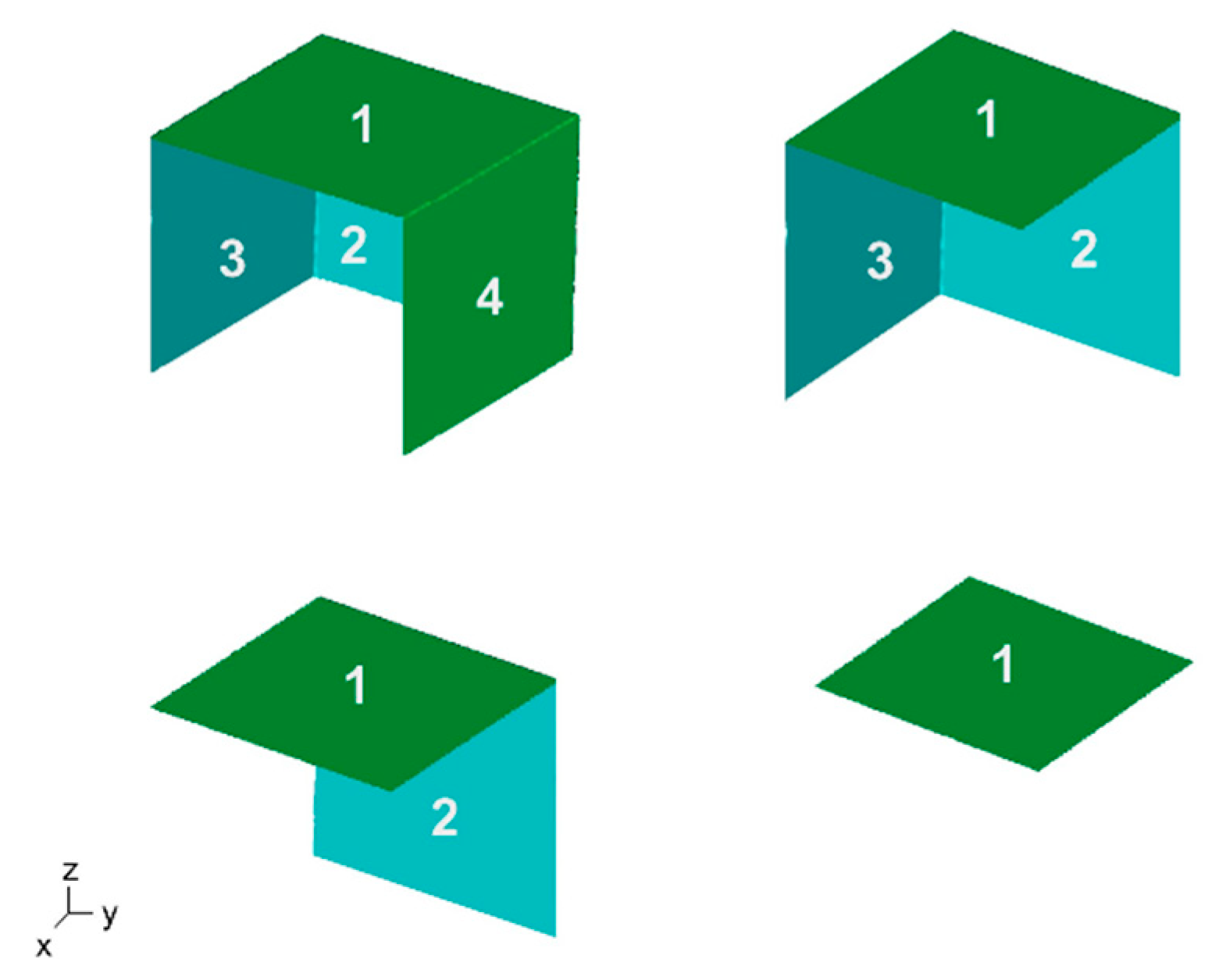
Figure 5b). This was surprising as we expected increases in the number of planes and corresponding surface area to reduce registration error. These findings suggest that any natural or artificial geometries used for feature selection should have at least two orthogonal surfaces, but more than two orthogonal surfaces would provide only nominal improvement. Additionally, we found that selection of the planar configurations most aligned with the object surface being analyzed (i.e., plane 1 and orthogonal planes 1-2;
Figure 4) resulted in the lowest average registration errors, although any changes in registration errors due to different planar configurations were not significant.
Results from this study can be depicted in terms of the scanner’s field of view (FOV). This is carried out by normalizing the surface area of the selected block features used for 3D model registration to the cross-sectional area of the scanner’s FOV (% FOV) (
Figure 7). This gives a simplistic way to determine the necessary size of the registration block to produce an accurate registration for a user-specified FOV. Using this approach, we see that blocks with features equivalent to 1% FOV resulted in registration errors upwards of 70 µm, while blocks with features equivalent to 4% FOV reduced errors to 4.8 ± 0.9 µm (
Figure 7). Furthermore, when evaluating features from the large block corresponding to 6% FOV (three-plane case) and 8% FOV (four-plane case), the registration errors were 4.6 ± 1.5 µm and 4.1 ± 1.5 µm, respectively. These small errors are comparable (
p = 0.067) to the average error of 2.9 ± 1.2 µm when using the entire 3D model (96% FOV) to optimize the mapping functions required for registration. This suggests that increasing the size of the registration block above 4% FOV would lead to only nominal improvements in registration accuracy. We should reiterate that for our study design, the object morphology of the reference and target 3D models was identical. Therefore, registration was optimized when using the entire object geometry to obtain the mapping function. However, when morphological differences do exist between the reference and target 3D model (e.g., mechanical wear), mapping functions obtained from an unaltered subset of the 3D model (i.e., registration block) can have significantly lower target registration errors compared to selecting the entire object geometry [
10].
Our results can be compared to other studies that registered 3D models by selecting intrinsic (natural to object) or artificial (intentionally placed) features on their object of interest. A study by Hollar et al. used a 3D optical scanner (LMI Technologies; FlexScan3D; FOV = 20 cm
2) to assess the mechanical wear within hip protheses mounted in a custom stand by registering pre- and post-wear 3D models [
10]. The model was registered by selecting complex intrinsic features on the relatively large stand and resulted in a registration error of approximately 5.1 ± 1.0 µm, very close to our own results when using a large registration block (
Table 1). Landi et al. used a portable 3D laser scanner (FreeScan UE7; Geomagic Control X; maximum FOV = 2652 cm
2) to analyze the deformation of machine guards before and after ballistic penetration, where 3D models were registered using intrinsic features consisting of the undeformed edges of the guards, with registration errors of approximately 300 µm [
21]. Based on the results of the present study (
Figure 5b), this registration error may have been reduced if orthogonal surfaces were selected for registration rather than edges. A study by Seminati et al. applied hemispherical adhesives to a residual limb model to serve as fiducial markers during optical 3D scanning (Artec Eva; Artec Studio 9.2 Studio; maximum FOV = 1989 cm
2), resulting in registration differences of less than 1000 µm [
18]. Campanelli et al. adhered spherical markers directly to a bovine femur to evaluate the reliability of the 3D models produced by a 3D laser scanner (Creaform; Geomagic Studio; maximum FOV = 688 cm
2), with a registration error of approximately 70 µm [
22]. Collectively, these prior results from other groups show 15–200× higher error, with 3–13× greater FOV than reported in the present study. This demonstrates that a simple cubic registration block can provide equal to superior performance to other more complex feature geometries used for 3D model registration.
There are notable limitations to this study. First, all of our results were based on the evaluation of planar features extracted from a cubic registration block. Other geometries may have performed well; however, a cube is simplistic, easily replicable, and produced low target registration errors (
Table 1). Second, we positioned our registration block relatively close to the tibial surface to minimize the distance between the registration block and surface being analyzed in order to enhance registration accuracy. Placement of the block further from the surface being analyzed would likely result in greater registration error, although the variability in the colorimetric map of the tibial surface would suggest that any increase in error would be relatively small when using the largest block size (
Figure 6). Lastly, all tests were performed using one type of 3D optical scanner and accompanying software program. While other types of scanner systems (e.g., 3D laser scanners) may have produced different registration errors, we would expect that the relative changes we observed in registration errors when altering the selected features (
Figure 5) would be consistent and that the conclusions from this study are applicable to other scanning systems that utilize ICP-based algorithms.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}