
Historic Timber Roof Structure Reconstruction through Automated Analysis of Point Clouds

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
Related Work
2. Materials and Methods
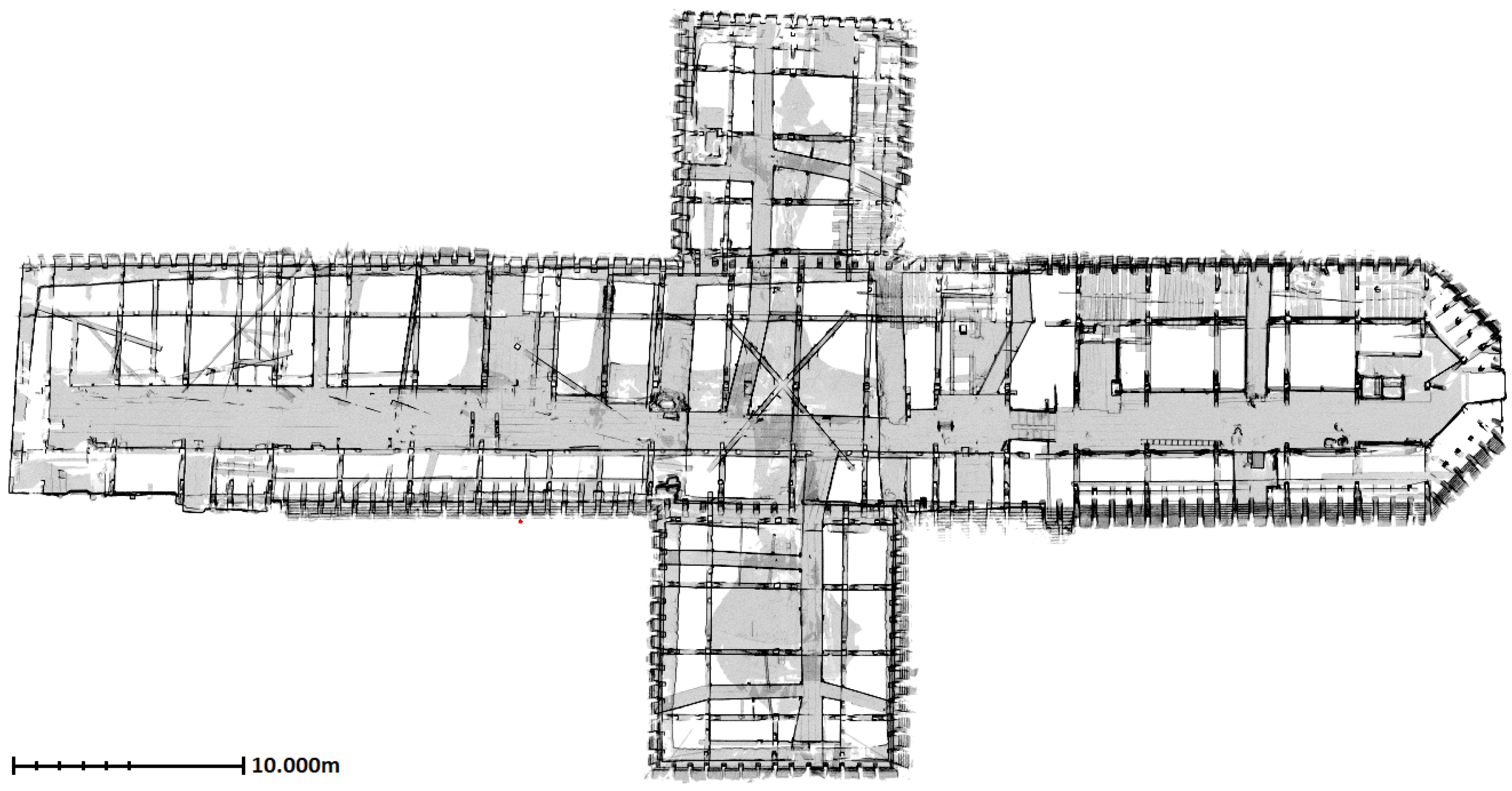
2.1. Roof Structure Site
2.2. Point Cloud Acquisition
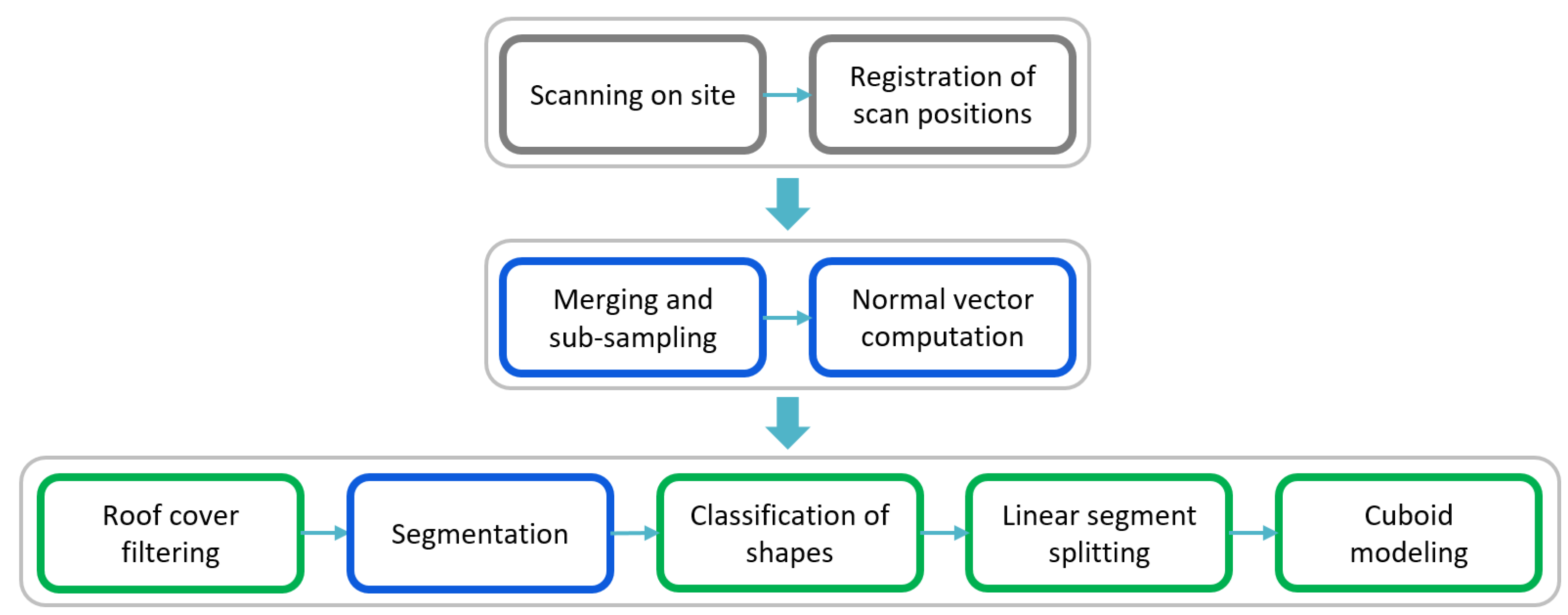
2.3. Method
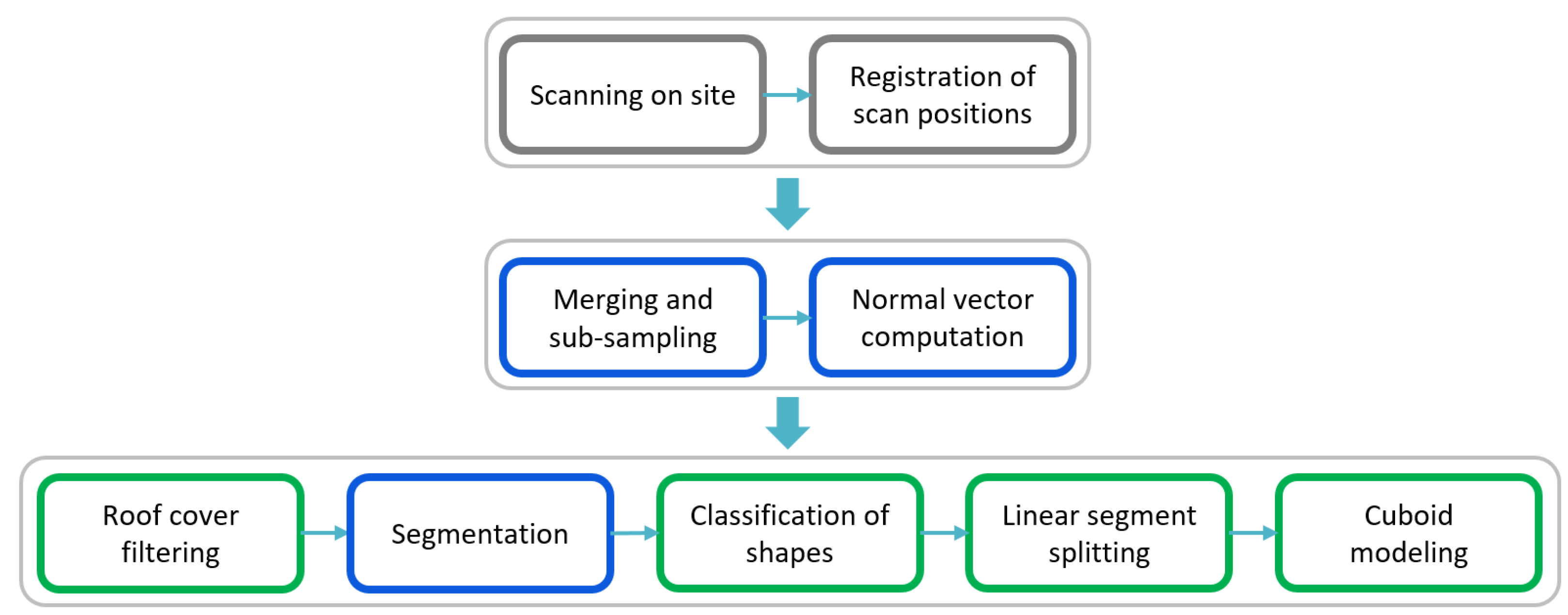
2.3.1. Overview
2.3.2. Combining of Point Clouds
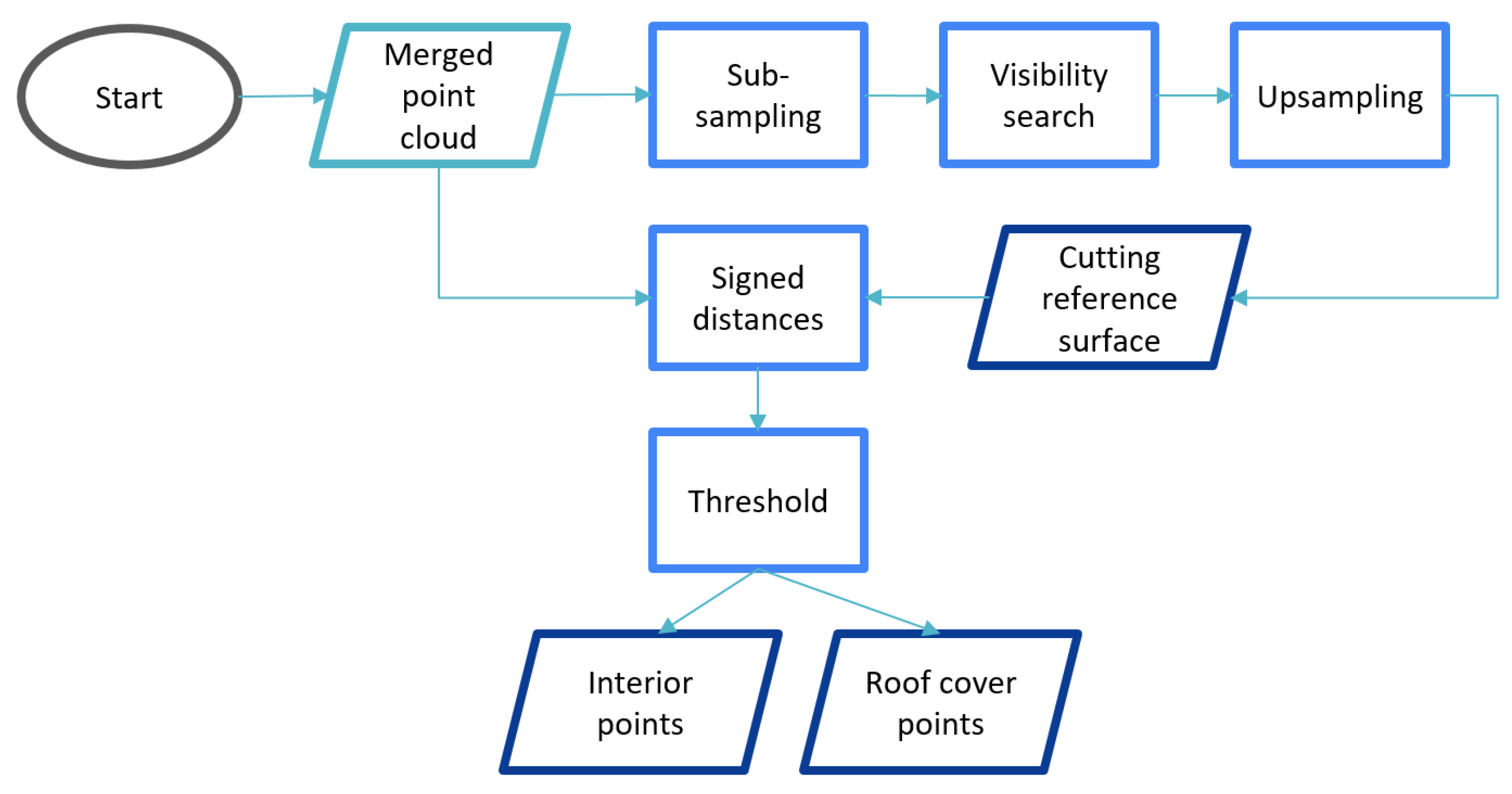
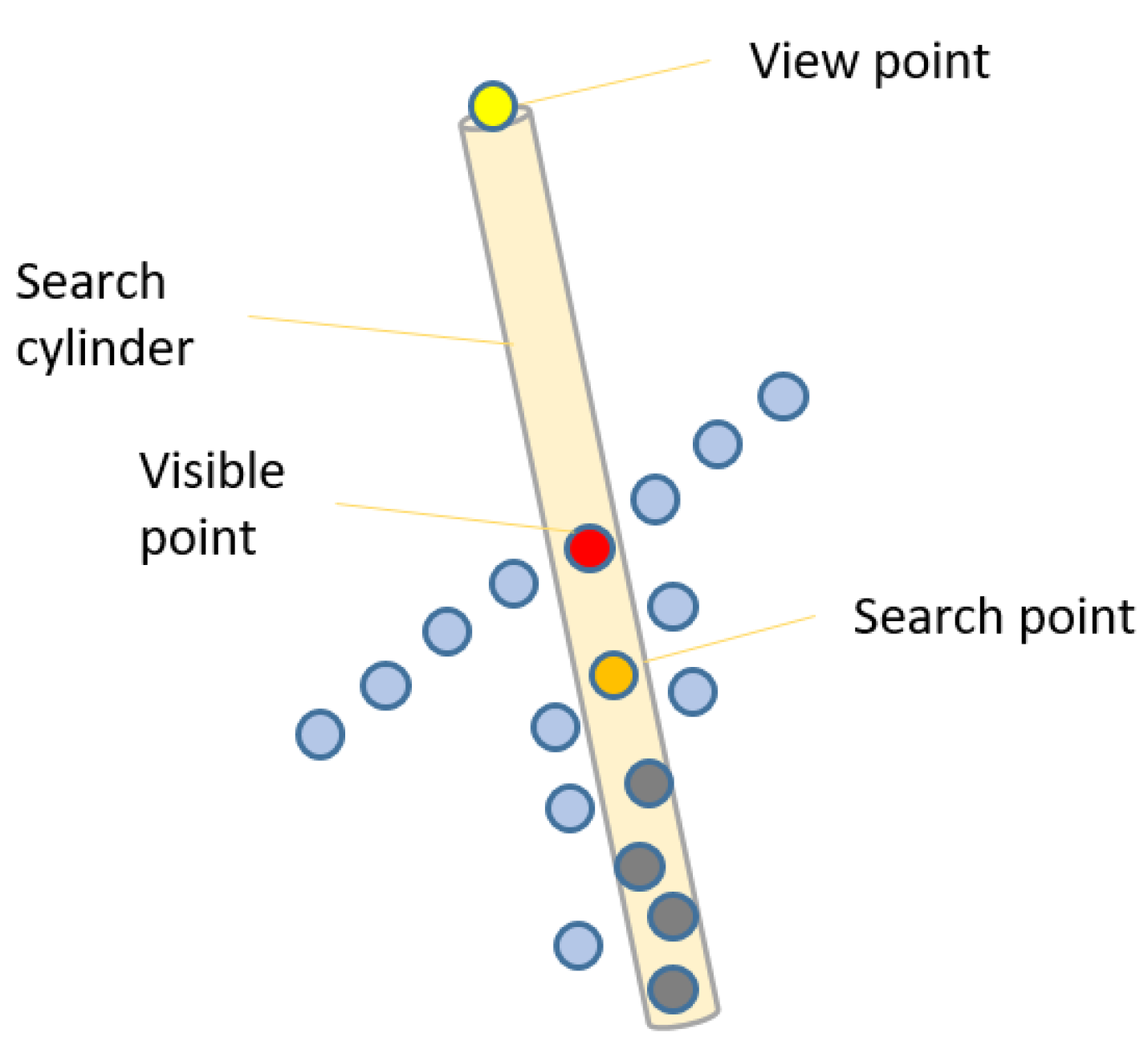
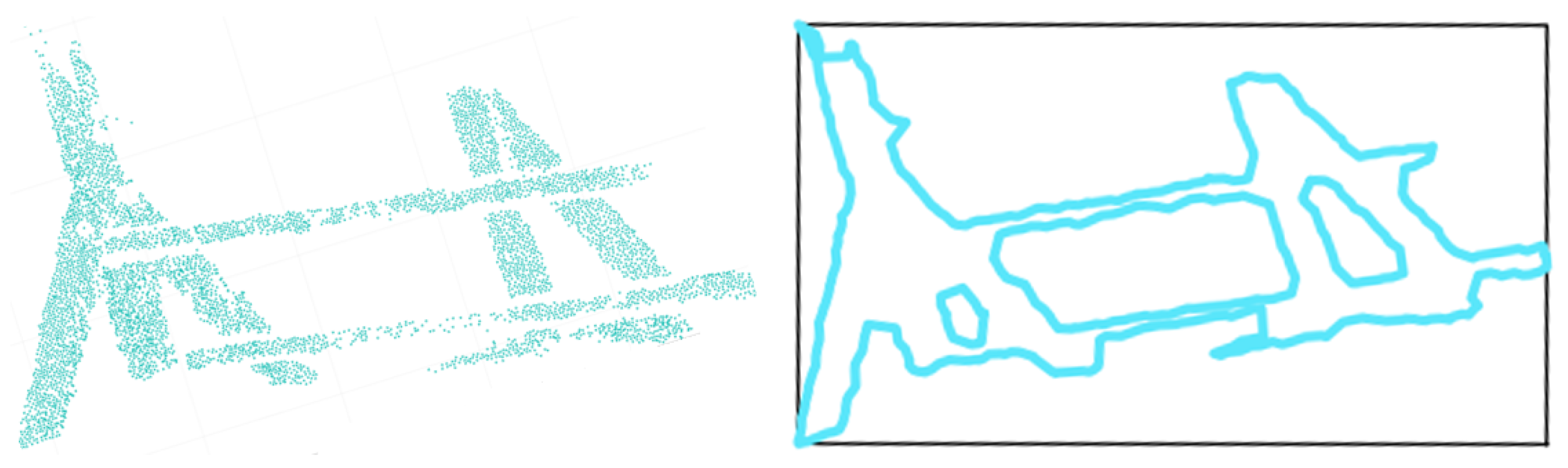
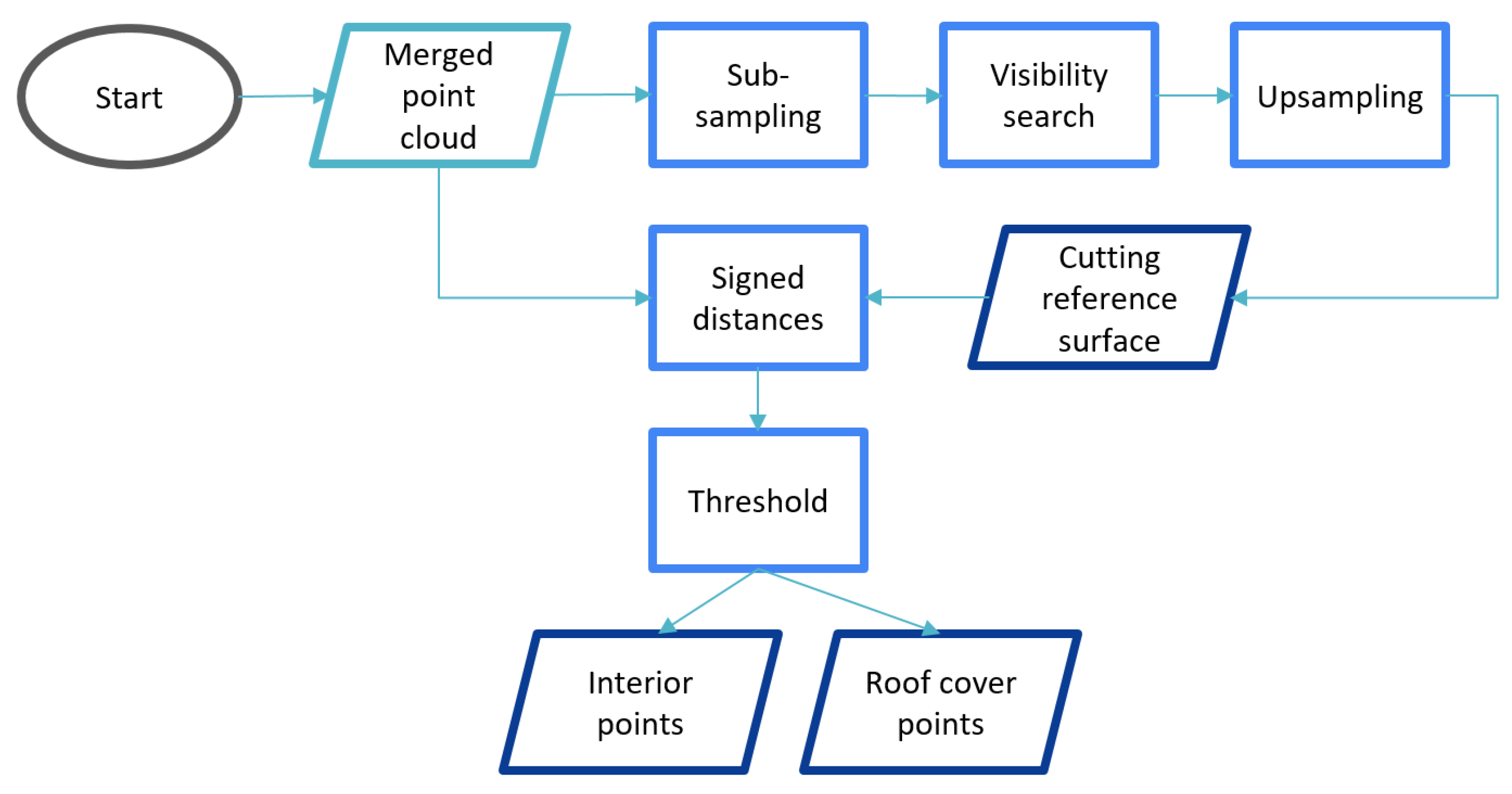
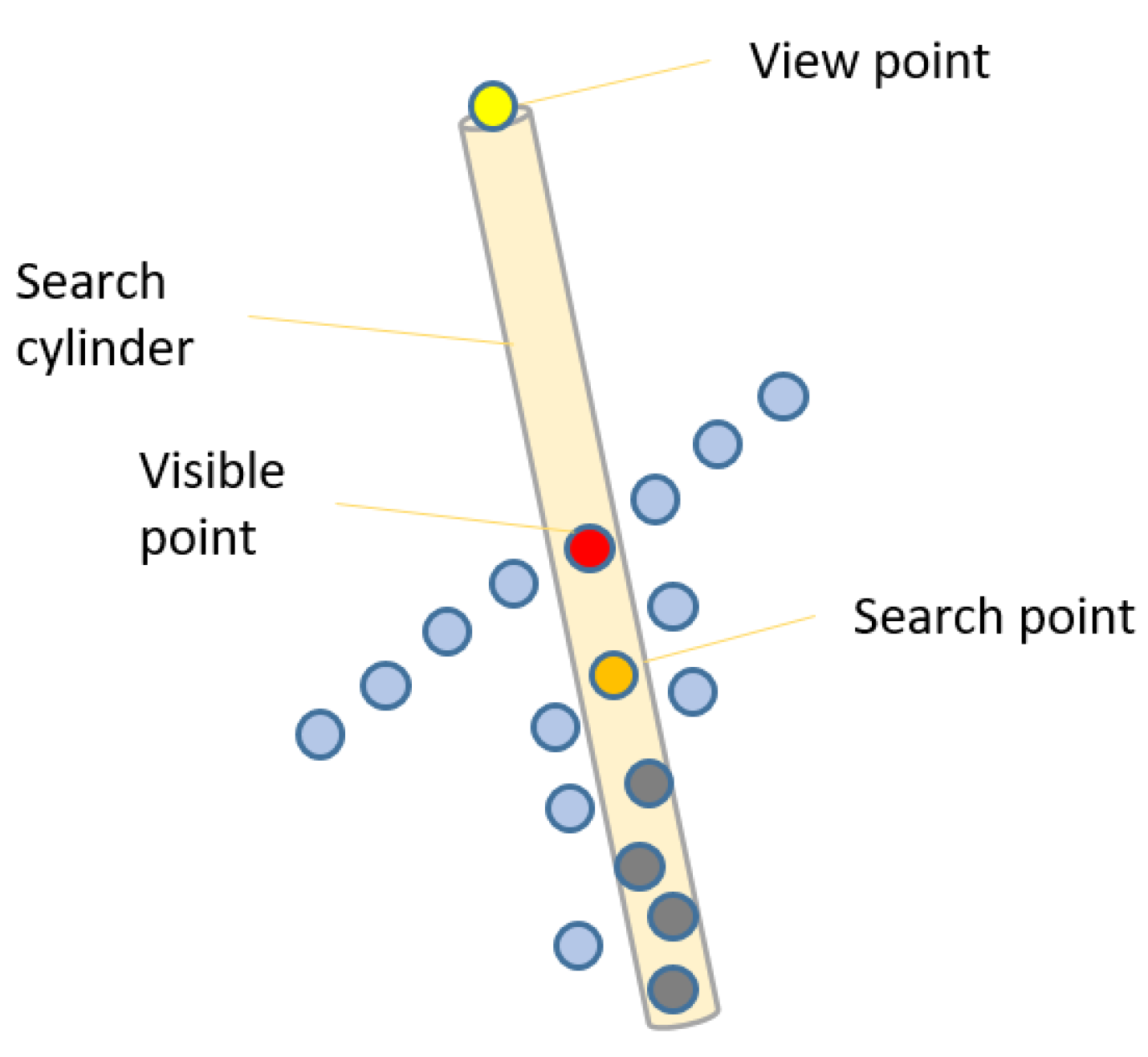
2.3.3. Roof Cover Filtering
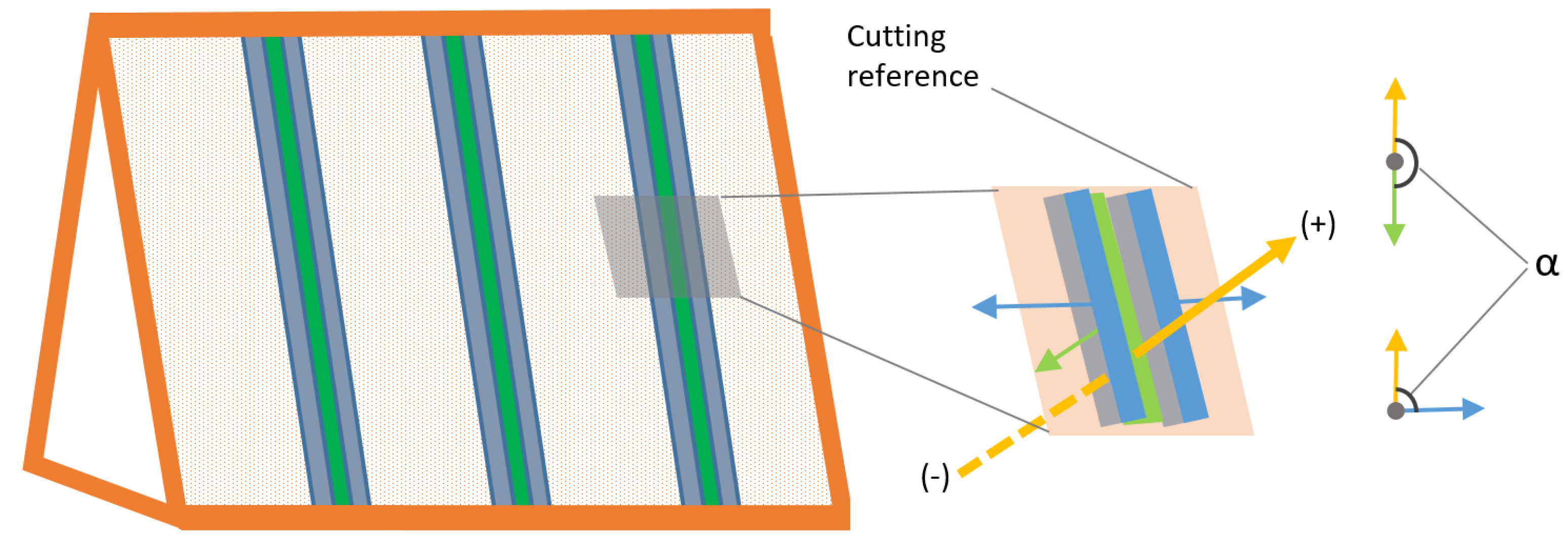
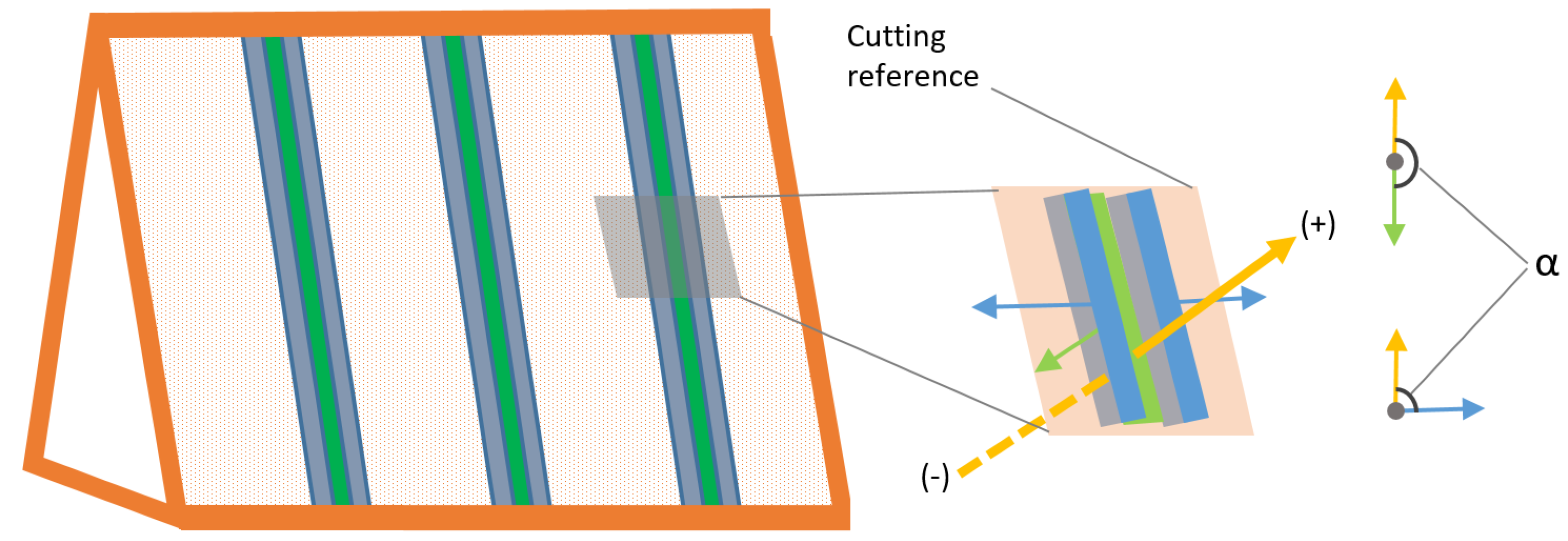
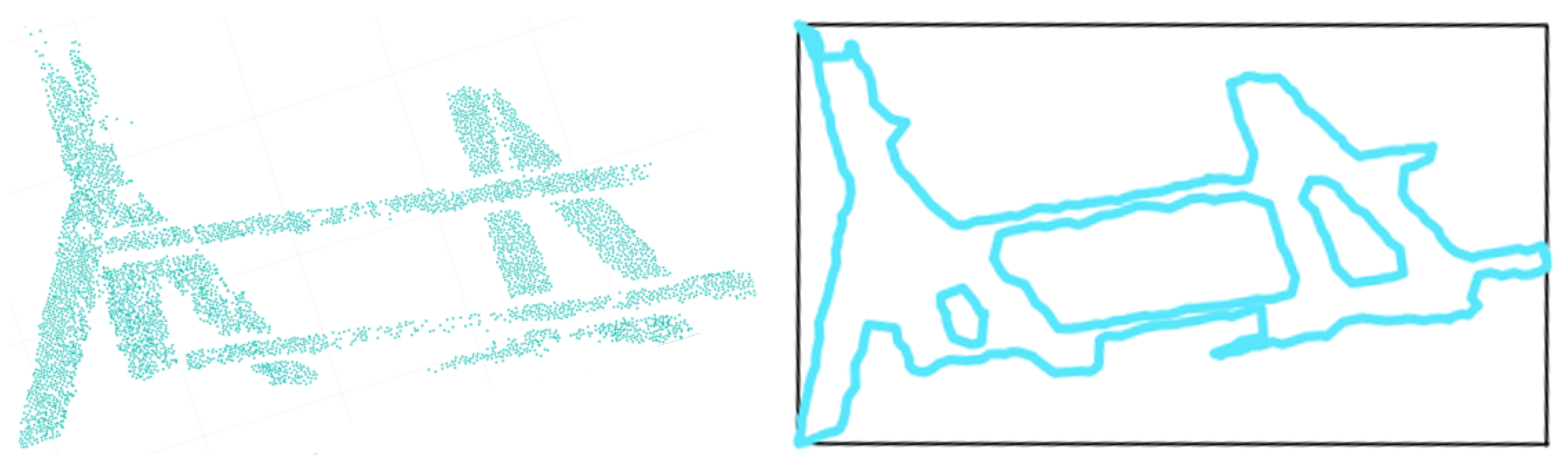
Preparation of Cutting Reference Surface
Point Cloud Split into Roof and Interior
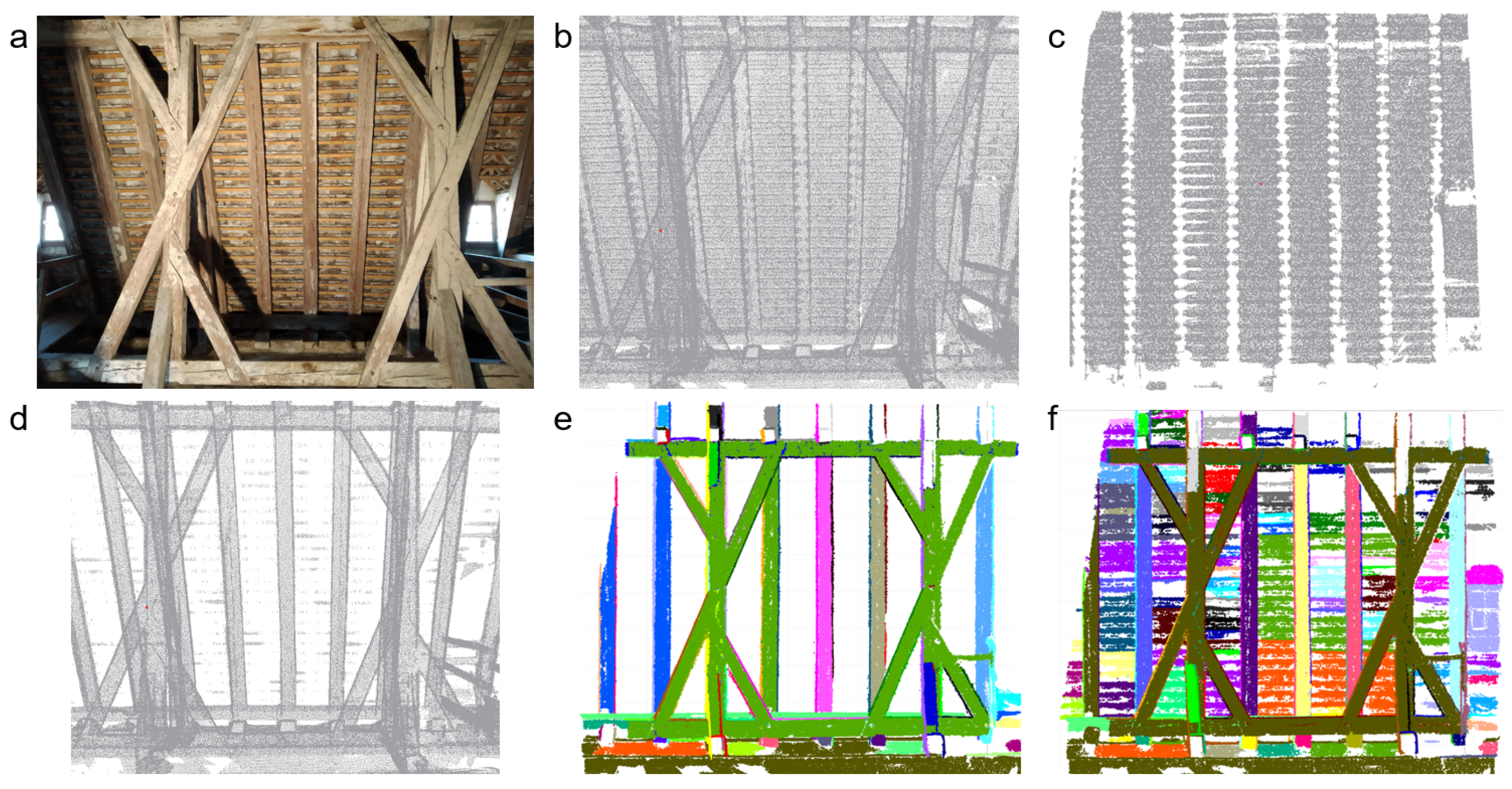
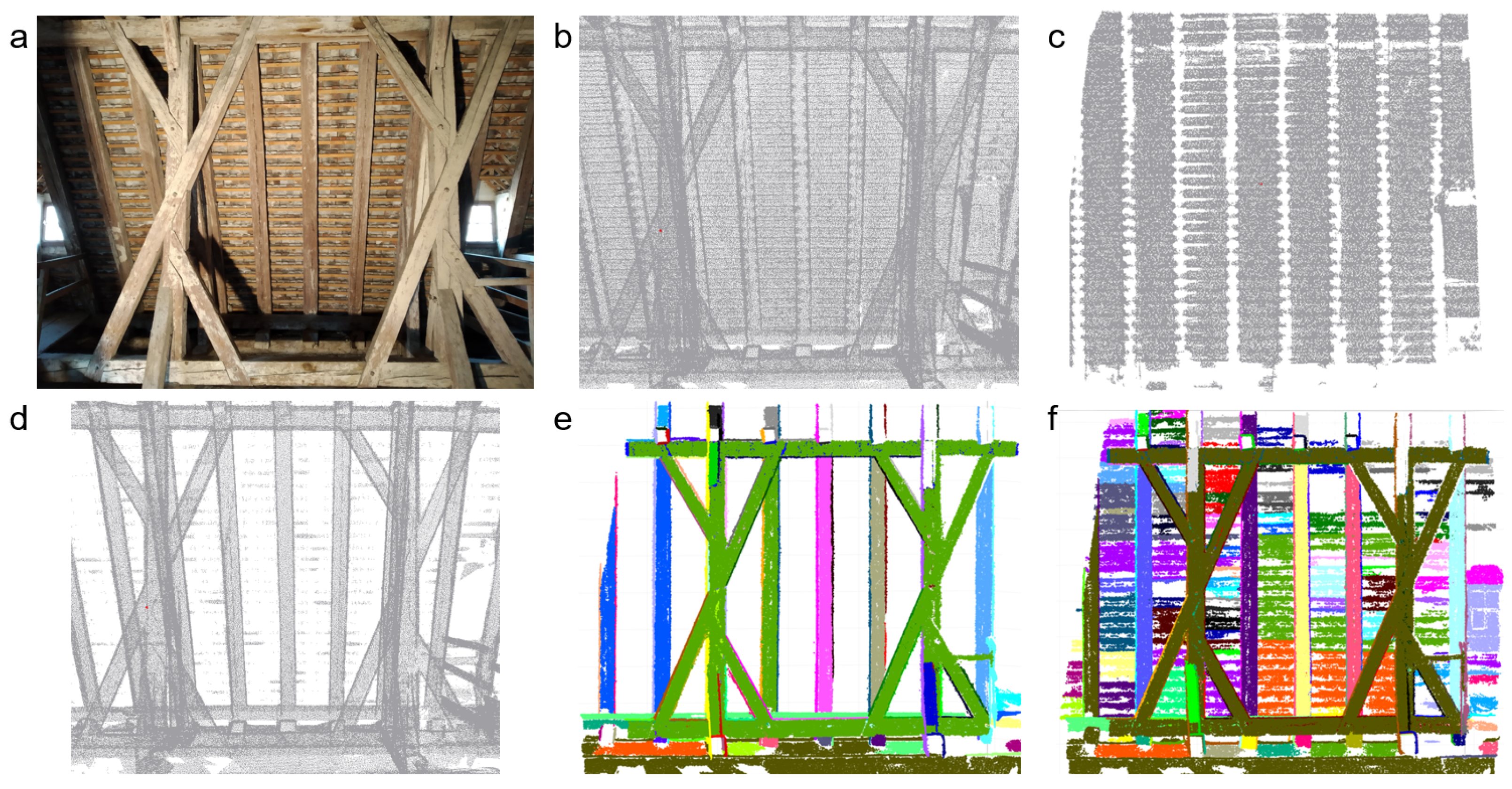
2.3.4. Segmentation
- Region-growing-based segmentation.
- Planar sub-segmenting.
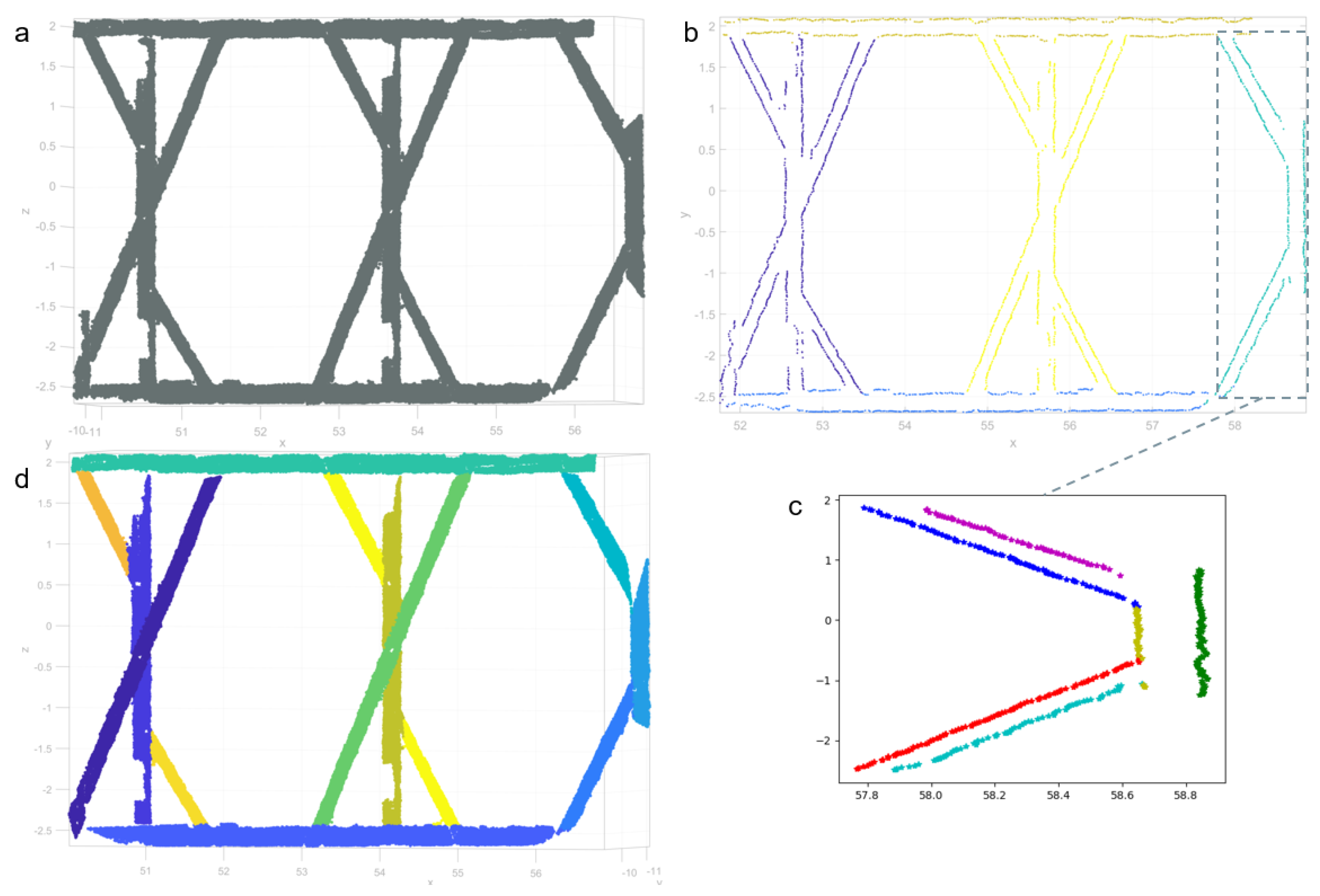
2.3.5. Shape Classification
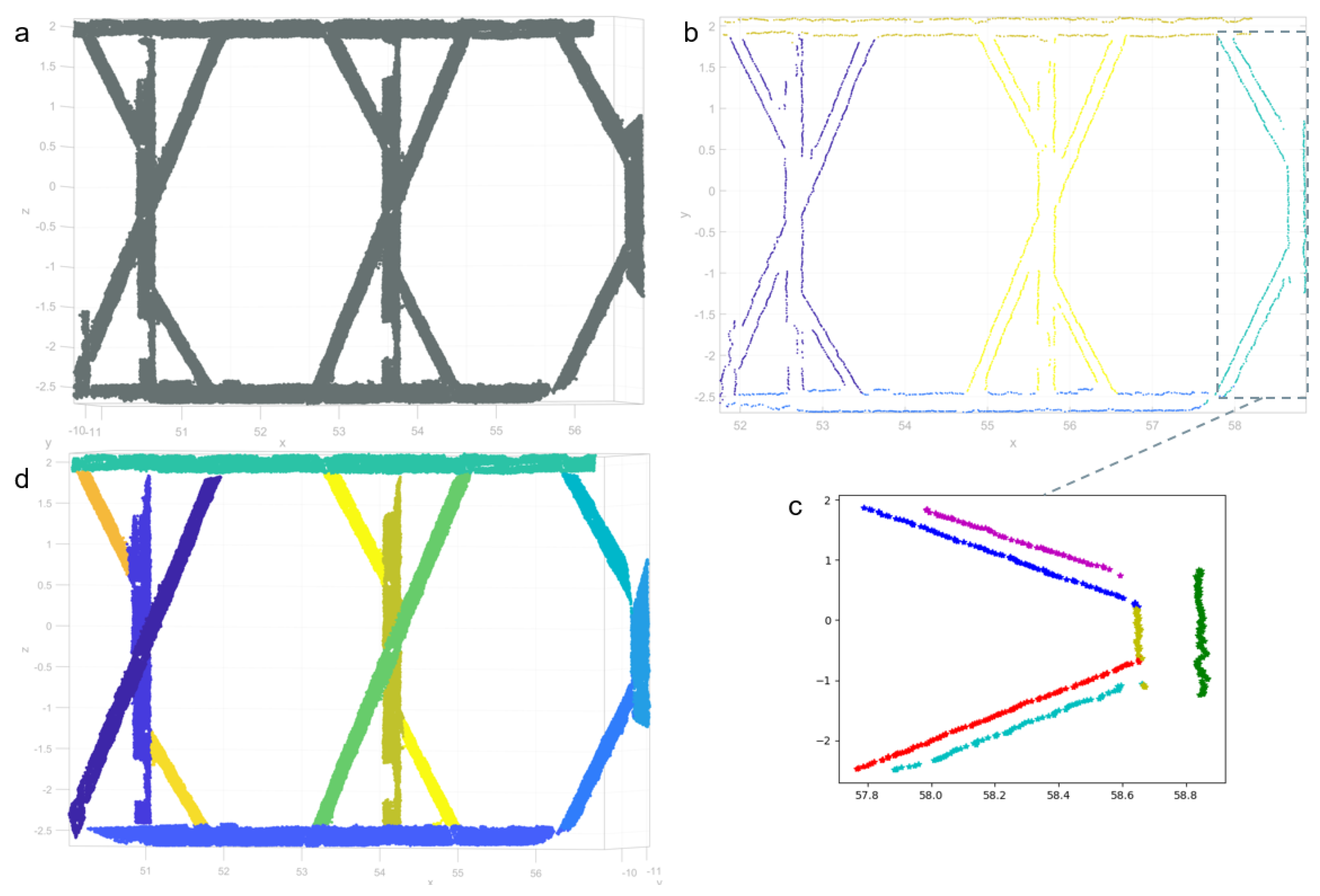
- Type-1: Linear shaped segments.
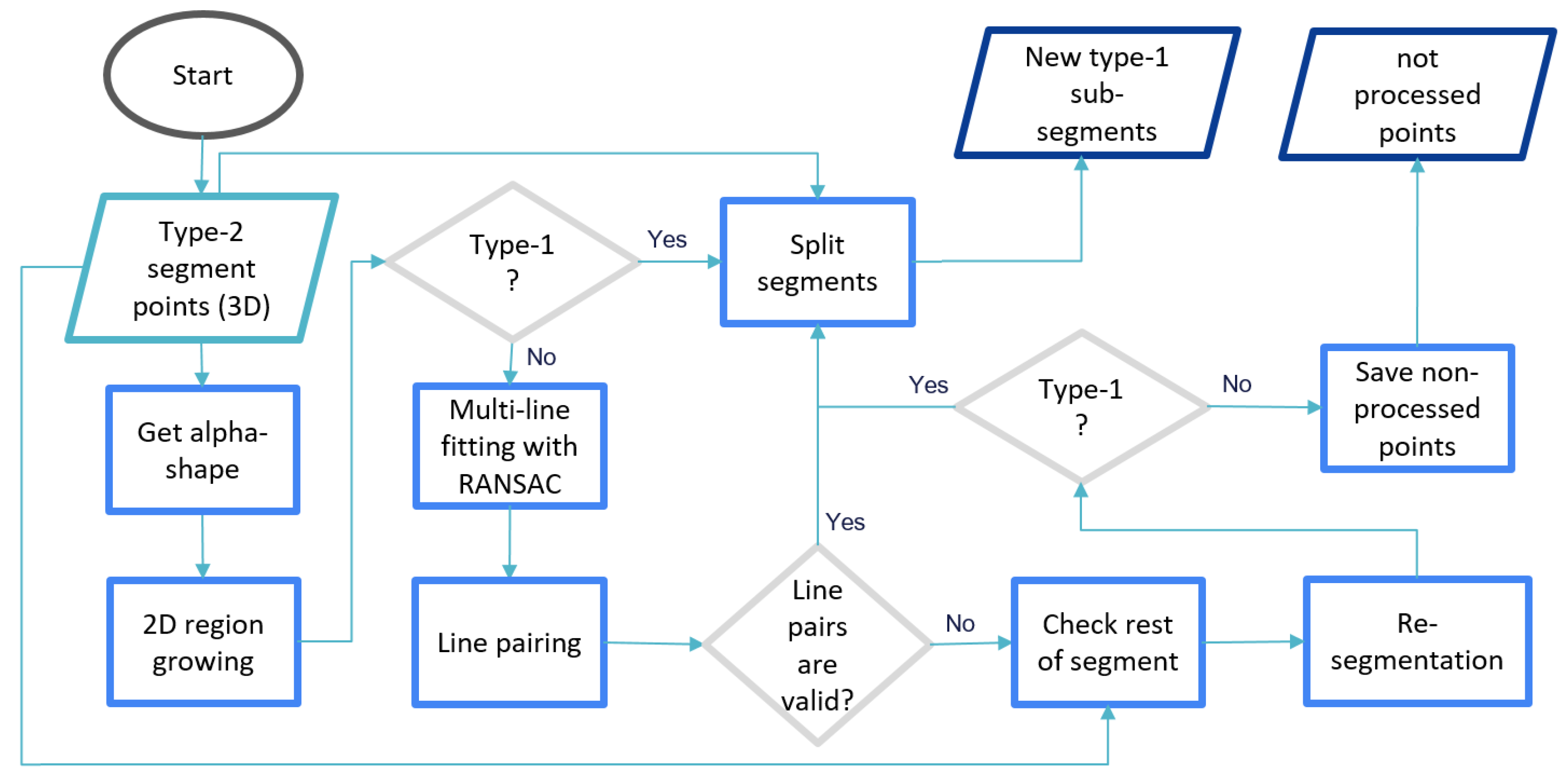
- Type-2: Non-linear segments with separable sub-segments.
- Type-3: Non-linear compact segments.
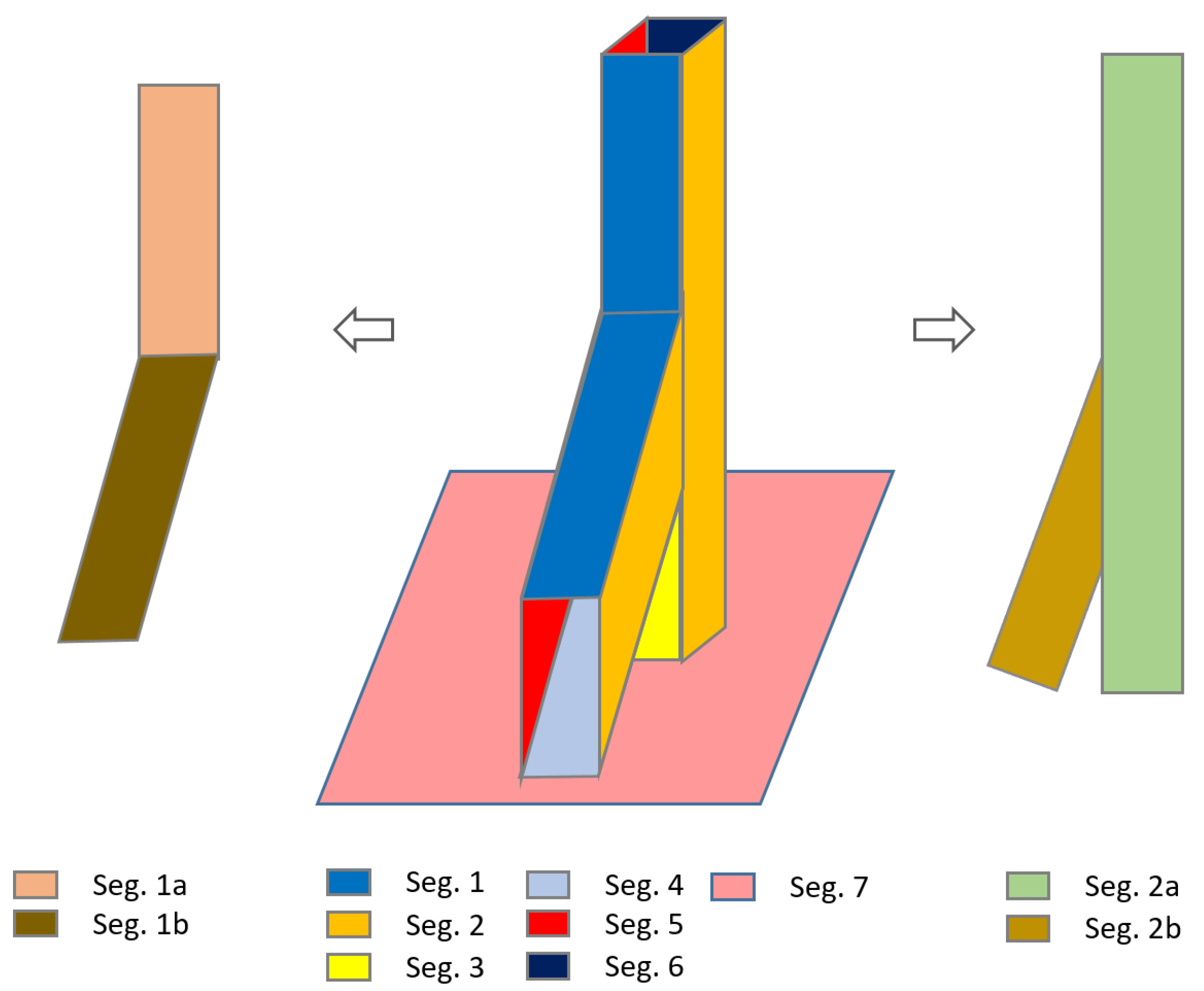
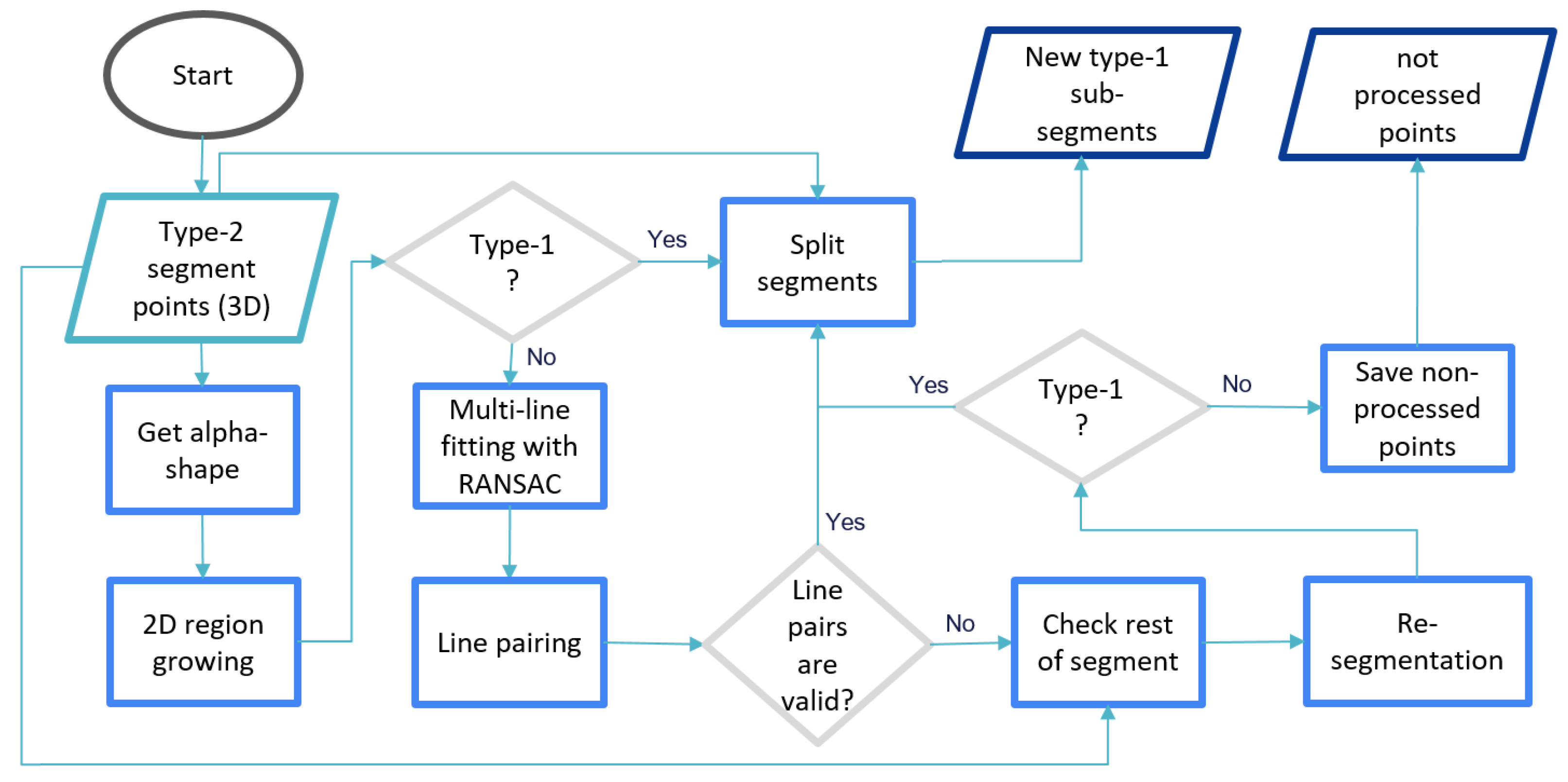
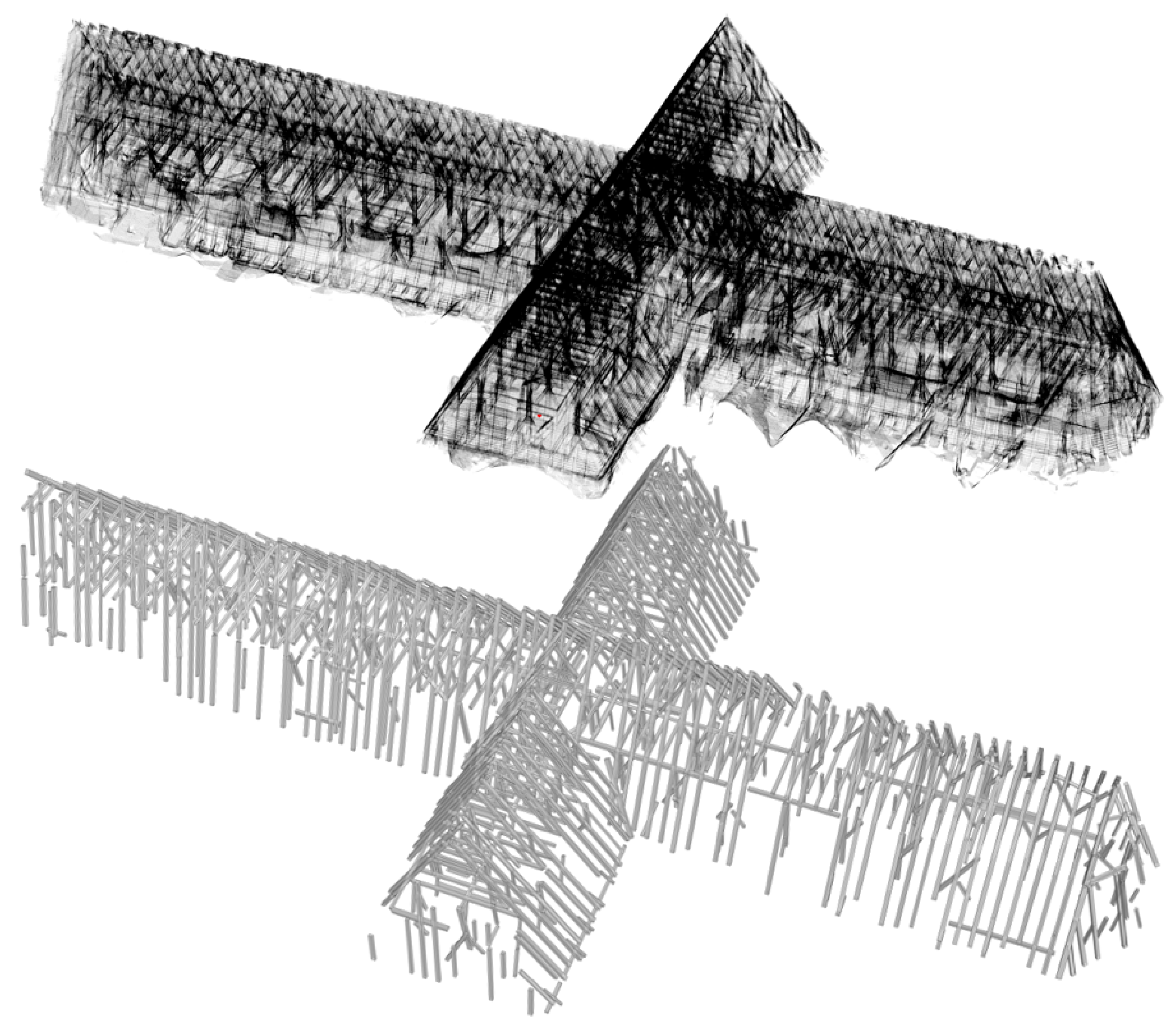
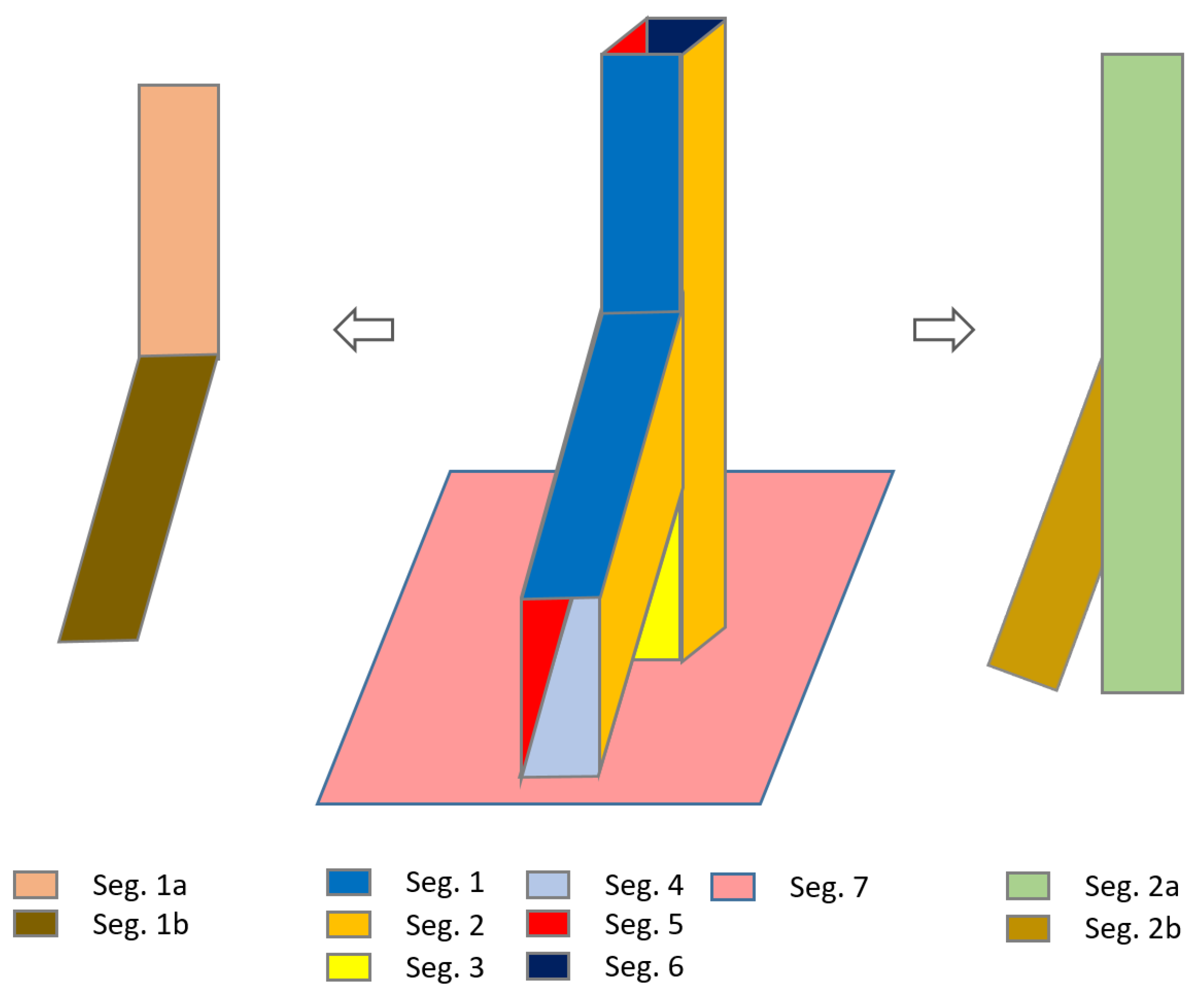
2.3.6. Linear Shaped Segment Splitting
2.3.7. Cuboid Fitting and Modeling
- Identification of adjacent beam segments.
- Fit cuboids for beams.
- Intersect beams and analyze the structure.
- Distance of centroid of reference to plane of candidate:
- Angle between normal vectors:
- Angle between longitudinal axes:
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liebich, H.A. The Vienna Roof Register—Investigating Historic Wooden Roof Structures in Vienna’s City Centre; Eberhardsteiner, J., Winter, W., Fadai, A., Pöll, M., Eds.; WCTE 2016 e-book; TU-Verlag: Vienna, Austria, 2016; pp. 3030–3038. ISBN 978-3-903024-35-9. [Google Scholar]
- Liebich, H.A. Dachwerke der Wiener Innenstadt. Konstruktion—Typologie—Bestand, Österreichische Denkmaltopographie 4; Verlag Berger: Horn, Austria, 2021; ISSN 2616-4957. [Google Scholar]
- Vosselman, G.; Maas, H.G. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Dunbeath, Scotland, 2010. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- McCarthy, J. Multi-image photogrammetry as a practical tool for cultural heritage survey and community engagement. J. Archaeol. Sci. 2014, 43, 175–185. [Google Scholar] [CrossRef]
- Chandler, J.; Buckley, S. Structure from Motion (SFM) Photogrammetry vs. Terrestrial Laser Scanning; American Geosciences Institute: Alexandria, VA, USA, 2016. [Google Scholar]
- Peña-Villasenín, S.; Gil-Docampo, M.; Ortiz-Sanz, J. Professional SfM and TLS vs a simple SfM photogrammetry for 3D modelling of rock art and radiance scaling shading in engraving detection. J. Cult. Herit. 2019, 37, 238–246. [Google Scholar] [CrossRef]
- Kamnik, R.; Perc, M.N.; Topolšek, D. Using the scanners and drone for comparison of point cloud accuracy at traffic accident analysis. Accid. Anal. Prev. 2020, 135, 105391. [Google Scholar] [CrossRef]
- Alexiou, S.; Deligiannakis, G.; Pallikarakis, A.; Papanikolaou, I.; Psomiadis, E.; Reicherter, K. Comparing High Accuracy t-LiDAR and UAV-SfM Derived Point Clouds for Geomorphological Change Detection. ISPRS Int. J. Geo-Inf. 2021, 10, 367. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, C. 3D reconstruction of as-built industrial instrumentation models from laser-scan data and a 3D CAD database based on prior knowledge. Autom. Constr. 2015, 49, 193–200. [Google Scholar] [CrossRef]
- Volk, R.; Stengel, J.; Schultmann, F. Building Information Modeling (BIM) for existing buildings—Literature review and future needs. Autom. Constr. 2014, 38, 109–127. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, A.; Ybanez Zepeda, J.A.; Boubekeur, T. A Survey of Simple Geometric Primitives Detection Methods for Captured 3D Data. Comput. Graph. Forum 2018, 38, 167–196. [Google Scholar] [CrossRef]
- Rabbani, T.; Heuvel, F. 3D Industrial Reconstruction by Fitting CSG Modles to a Combination of Images and Point Clouds. ISPRS Spat. Inf. Sci. 2004, 35, 7–15. [Google Scholar]
- Masuda, H.; Tanaka, I. As-built 3D modeling of large facilities based on interactive feature editing. Comput. Aided Des. Appl. 2010, 7, 349–360. [Google Scholar] [CrossRef] [Green Version]
- Poullis, C. A Framework for Automatic Modeling from Point Cloud Data. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2563–2575. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Klein, R. Automatic reconstruction of fully volumetric 3D building models from oriented point clouds. ISPRS J. Photogramm. Remote Sens. 2019, 151, 251–262. [Google Scholar] [CrossRef] [Green Version]
- Balletti, C.; Berto, M.; Gottardi, C.; Guerra, F. Ancient Structures and New Technologies: Survey and Digital Representation of the Wooden Dome of SS. Giovanni E Paolo in Venice. ISPRS Ann. Photogramm. 2013, II-5, 25–30. [Google Scholar] [CrossRef] [Green Version]
- Cabaleiro, M.; Riveiro, B.; Arias, P.; Caamaño, J.C. Algorithm for the analysis of the geometric properties of cross-sections of timber beams with lack of material from LIDAR data. Mater. Struct. 2016, 49, 4265–4278. [Google Scholar] [CrossRef]
- Pöchtrager, M.; Styhler-Aydin, G.; Döring-Williams, M.; Pfeifer, N. Automated Reconstruction of Historic Roof Structures from Point clouds—Development and Examples. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, IV-2/W2, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Pöchtrager, M.; Styhler-Aydin, G.; Döring-Williams, M.; Pfeifer, N. Digital reconstruction of historic roof structures: Developing a workflow for a highly automated analysis. Virtual Archaeol. Rev. 2018, 9, 21–33. [Google Scholar] [CrossRef] [Green Version]
- Murtiyoso, A.; Grussenmeyer, P. Virtual Disassembling of Historical Edifices: Experiments and Assessments of an Automatic Approach for Classifying Multi-Scalar Point Clouds into Architectural Elements. Sensors 2020, 20, 2161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eßer, G.; Styhler-Aydın, G.; Hochreiner, G. The historic roof structures of the Vienna Hofburg: An innovative interdisciplinary approach in architectural sciences laying ground for structural modeling. In World Conference of Timber Engineering; Eberhardsteiner, J., Winter, W., Fadai, A., Pöll, M., Eds.; WCTE 2016 e-book; TU Verlag: Vienna, Austria, 2016; pp. 3039–3047. [Google Scholar]
- Styhler-Aydın, G.; Eßer, G. Das Dachwerk der Kirche St. Michael in Wien—Baudokumentation und Bauanalyse; Die Wiener Hofburg im Mittelalter. Von der Kastellburg bis zu den Anfängen der Kaiserresidenz; Schwarz, M., Ed.; Verlag der Österreichischen, Akademie der Wissenschaften: Vienna, Austria, 2016; pp. 527–538. ISBN 978-3-7001-7656-5. [Google Scholar]
- Wang, Q.; Tan, Y.; Mei, Z. Computational Methods of Acquisition and Processing of 3D Point Cloud Data for Construction Applications. Arch. Comput. Methods Eng. 2020, 27, 479–499. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Sadeghlou, K.; Abdolvand, M.M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Riegl (VZ-2000i Terrestrial Laser Scanner). Available online: http://www.riegl.com/nc/products/terrestrial-scanning/produktdetail/product/scanner/58/ (accessed on 20 September 2021).
- RiScanPRO (Version 2.0). Available online: http://www.riegl.com/products/software-packages/riscan-pro/ (accessed on 20 September 2021).
- Pfeifer, N.; Mandlburger, G.; Otepka, J.; Karel, W. OPALS—A framework for Airborne Laser Scanning data analysis. Comput. Environ. Urban Syst. 2014, 45, 125–136. [Google Scholar] [CrossRef]
- OPALS Data Manager (ODM) (Version 2.3.2). Available online: https://opals.geo.tuwien.ac.at/html/stable/ref_odm.html (accessed on 16 September 2021).
- Van Rossum, G.; Drake, F.L., Jr. Python Tutorial; Centrum voor Wiskunde en Informatica: Amsterdam, The Netherlands, 1995. [Google Scholar]
- ASPRS LAS File Format (Version 1.4). Available online: https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities (accessed on 22 September 2021).
- Katz, S.; Tal, A.; Basri, R. Direct visibility of point sets. ACM Trans. Graph. 2007, 26, 24–40. [Google Scholar] [CrossRef]
- Levin, D. The approximation power of moving least-squares. Math. Comput. 1998, 67, 1517–1532. [Google Scholar] [CrossRef] [Green Version]
- Shakarji, C.M. Least-Squares Fitting Algorithms of the NIST Algorithm Testing System. J. Res. Natl. Inst. Stand. Technol. 1998, 103, 633–641. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface reconstruction from unorganized points. ACM SIG-GRAPH Comput. Graph. 1992, 21, 71–82. [Google Scholar] [CrossRef]
- Edelsbrunner, H.; Kirkpatrick, D.G.; Seidel, R. On the shape of a set of points in the plane. IEEE Trans. Inf. Theory 1983, 29, 551–559. [Google Scholar] [CrossRef] [Green Version]
- DXF Open Data Exchange Format (Version AC1014). Available online: https://knowledge.autodesk.com/support/autocad/learn-explore/caas/CloudHelp/cloudhelp/2019/ENU/AutoCAD-Core/files/GUID-D4242737-58BB-47A5-9B0E-1E3DE7E7D647-htm.html (accessed on 14 October 2021).
- STEP. Industrial Automation Systems and Integration—Product Data Representation and Exchange. (Version ISO 10303-21:2016). Available online: https://www.loc.gov/preservation/digital/formats/fdd/fdd000448.shtml (accessed on 14 October 2021).
- Laney, D. 3D data management: Controlling data volume, velocity and variety. META Group Res. Note 2001, 6, 1. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process Name | Number of Points | Percentage (%) | |
|---|---|---|---|
| Before | After | ||
| Laser scanning | - | 634,065,068 | 100 |
| Sub-sampling | 634,065,068 | 58,816,336 | 9.28 |
| Roof cover filtering | 58,816,336 | 42,351,765 | 6.68 |
| Segmentation | 42,351,765 | 22,922,973 | 3.62 |
| Segment Class | Number of Segments | |
|---|---|---|
| Planar | Non-Planar | |
| Type-1 | 3208 | 117 |
| Type-2 | 1757 | 264 |
| Type-3 | 79 | - |
| Region | Number of Beams | Method 1 | Method 2 | Method 3 |
|---|---|---|---|---|
| Northern transept | 199 | 61 | 129 | 150 |
| Southern transept | 194 | 53 | 117 | 146 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Özkan, T.; Pfeifer, N.; Styhler-Aydın, G.; Hochreiner, G.; Herbig, U.; Döring-Williams, M. Historic Timber Roof Structure Reconstruction through Automated Analysis of Point Clouds. J. Imaging 2022, 8, 10. https://doi.org/10.3390/jimaging8010010
Özkan T, Pfeifer N, Styhler-Aydın G, Hochreiner G, Herbig U, Döring-Williams M. Historic Timber Roof Structure Reconstruction through Automated Analysis of Point Clouds. Journal of Imaging. 2022; 8(1):10. https://doi.org/10.3390/jimaging8010010
Chicago/Turabian StyleÖzkan, Taşkın, Norbert Pfeifer, Gudrun Styhler-Aydın, Georg Hochreiner, Ulrike Herbig, and Marina Döring-Williams. 2022. "Historic Timber Roof Structure Reconstruction through Automated Analysis of Point Clouds" Journal of Imaging 8, no. 1: 10. https://doi.org/10.3390/jimaging8010010
APA StyleÖzkan, T., Pfeifer, N., Styhler-Aydın, G., Hochreiner, G., Herbig, U., & Döring-Williams, M. (2022). Historic Timber Roof Structure Reconstruction through Automated Analysis of Point Clouds. Journal of Imaging, 8(1), 10. https://doi.org/10.3390/jimaging8010010