A Combined Non-Invasive Approach to the Study of A Mosaic Model: First Laboratory Experimental Results

 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
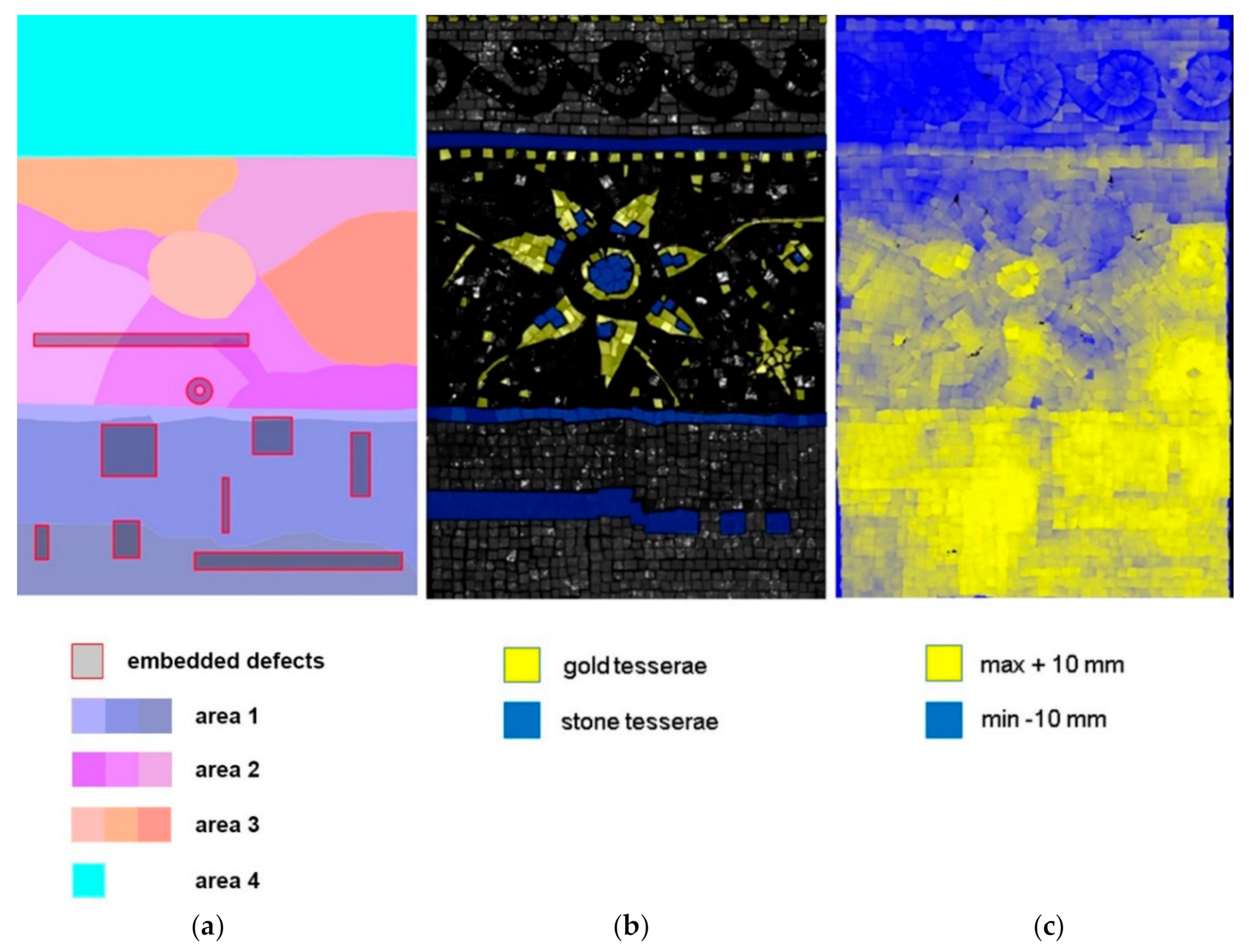
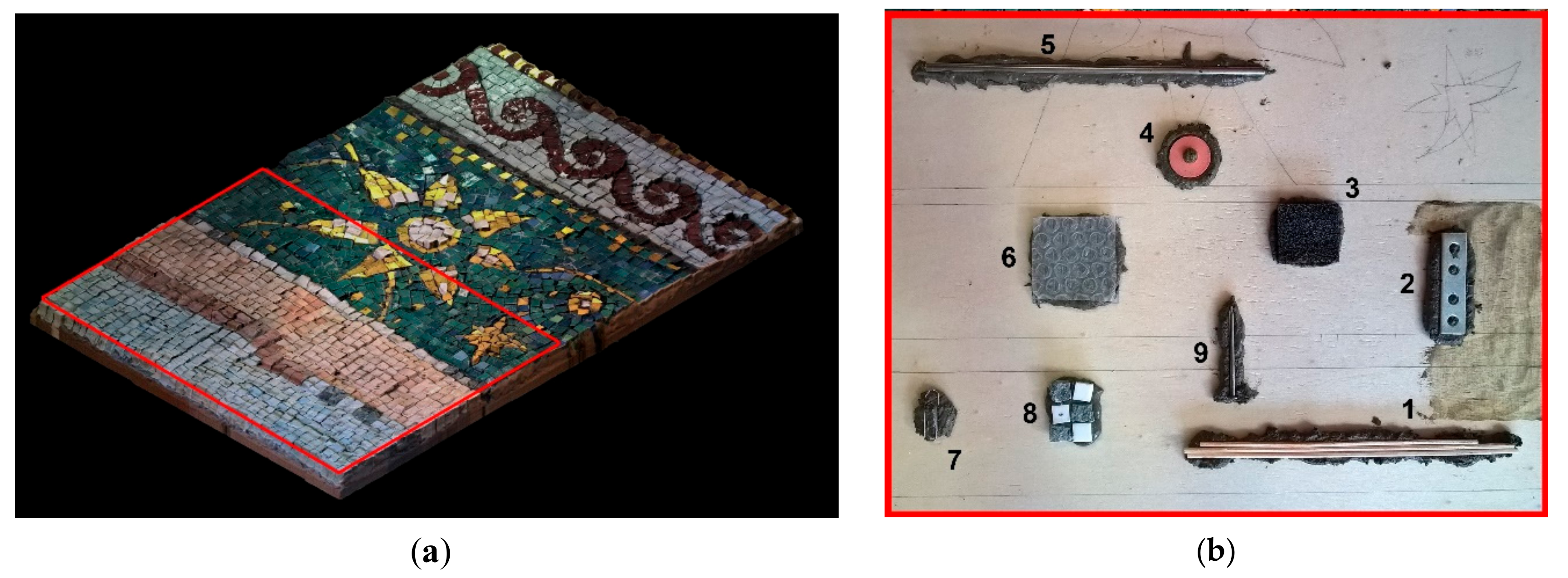
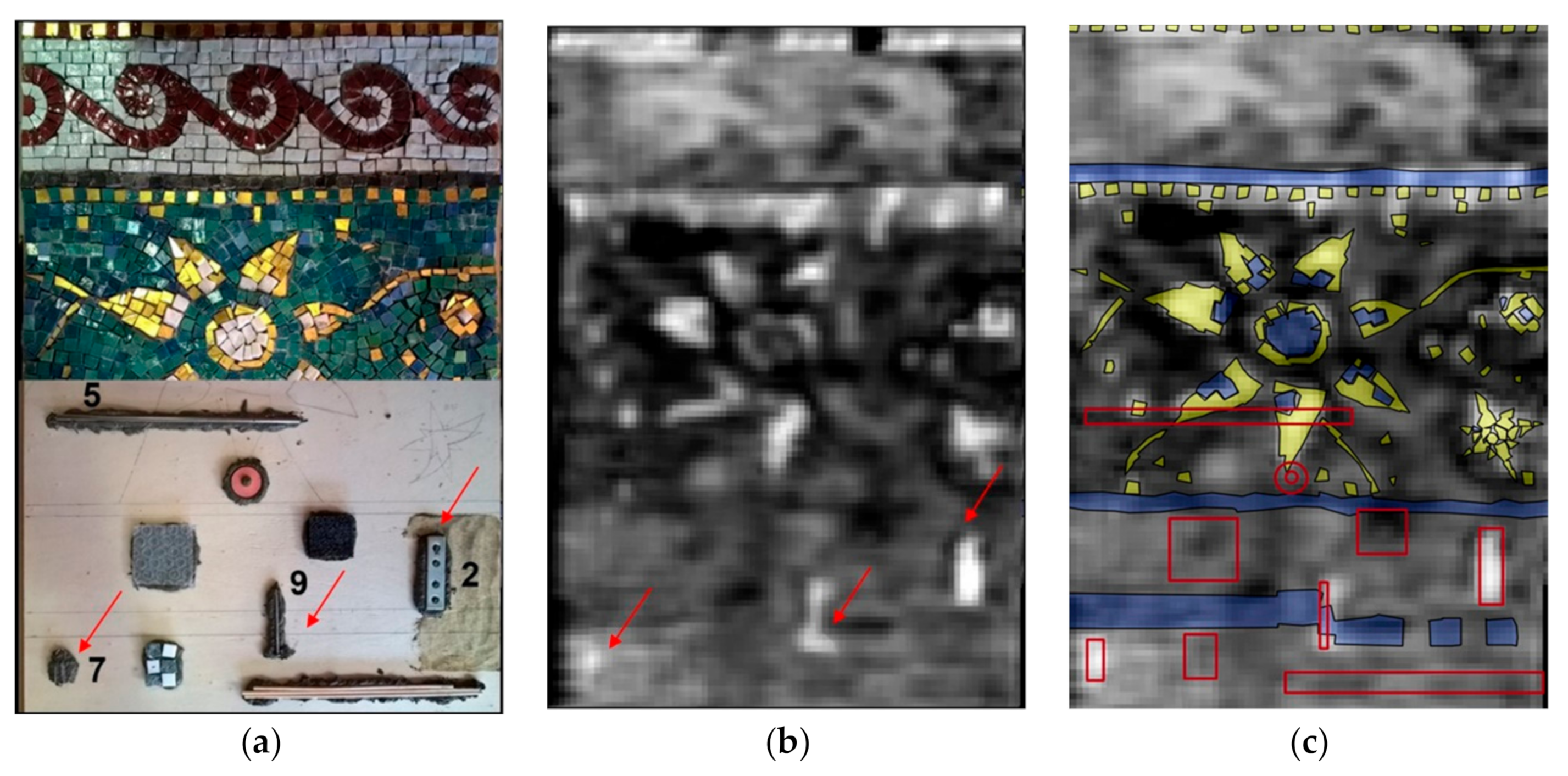
2.1. Sample Description
2.2. Methodology and Experimental Procedure
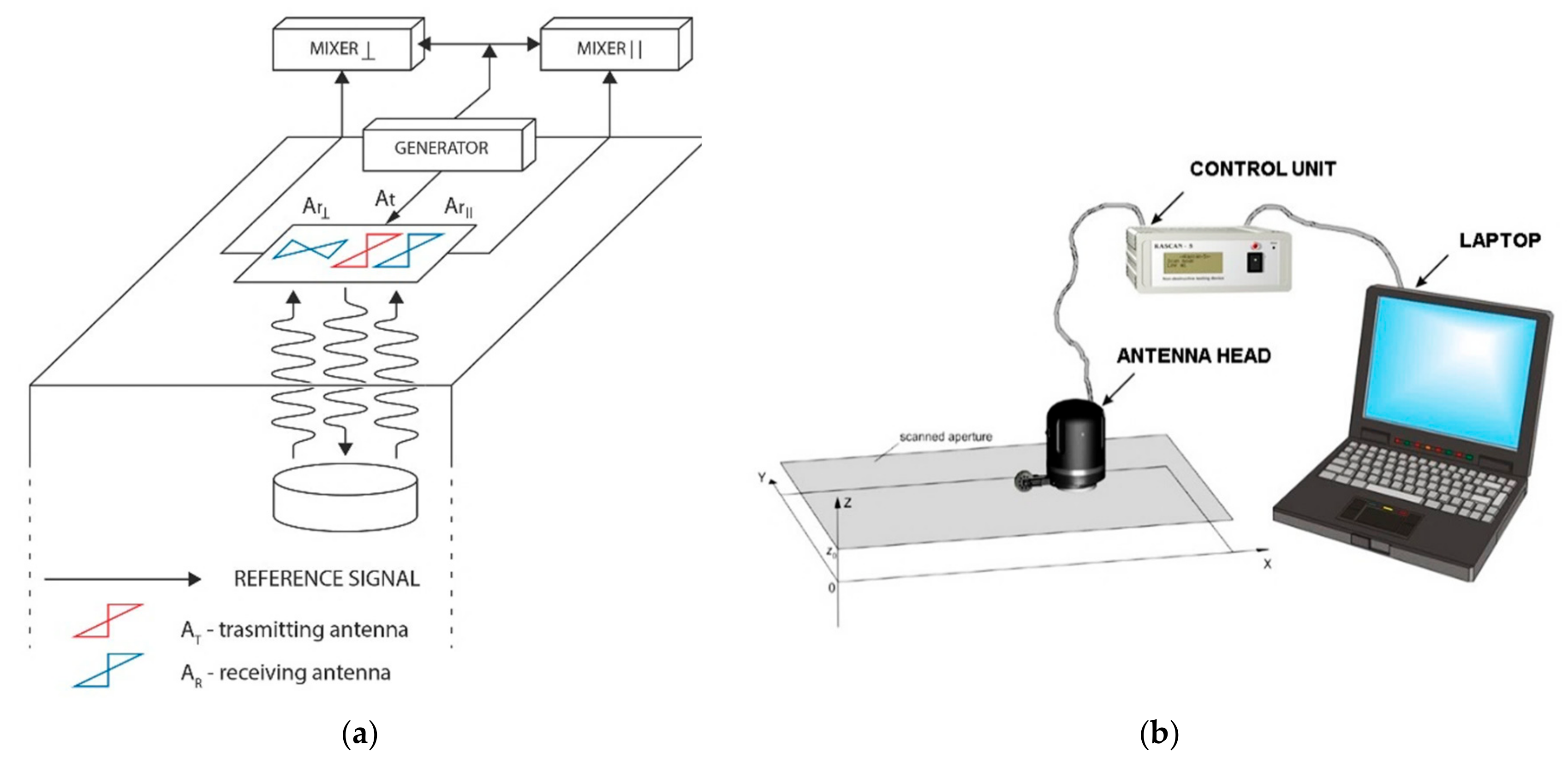
2.2.1. Holographic Subsurface Radar
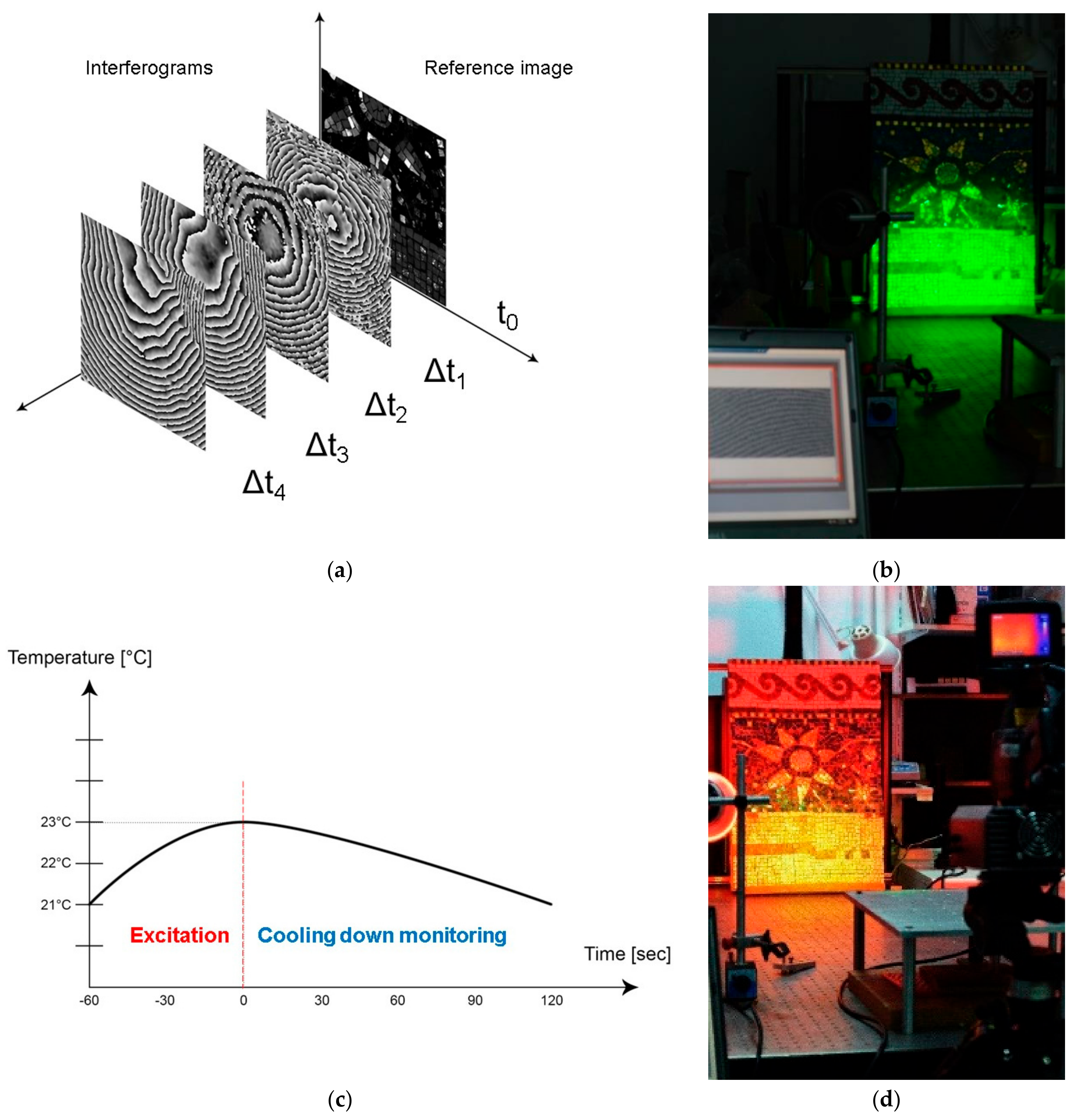
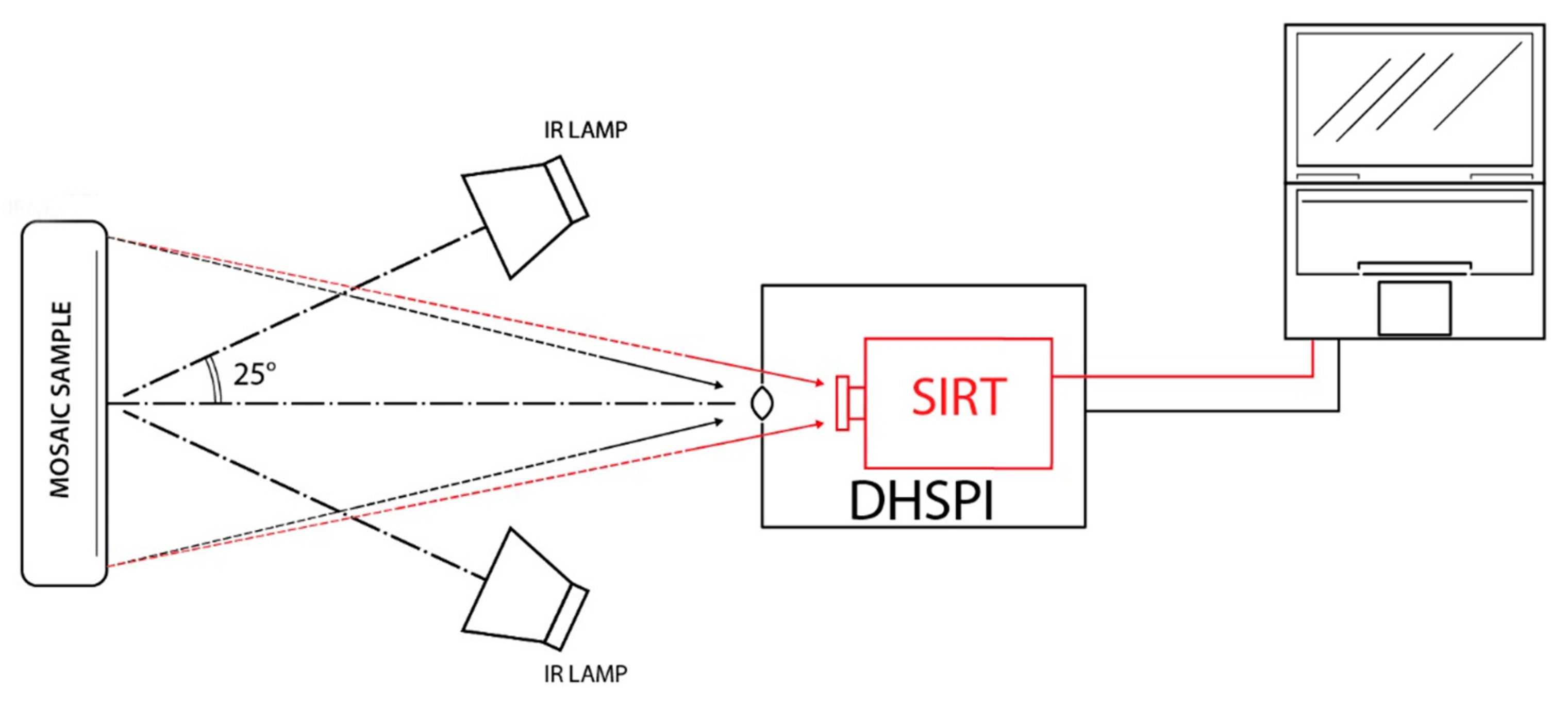
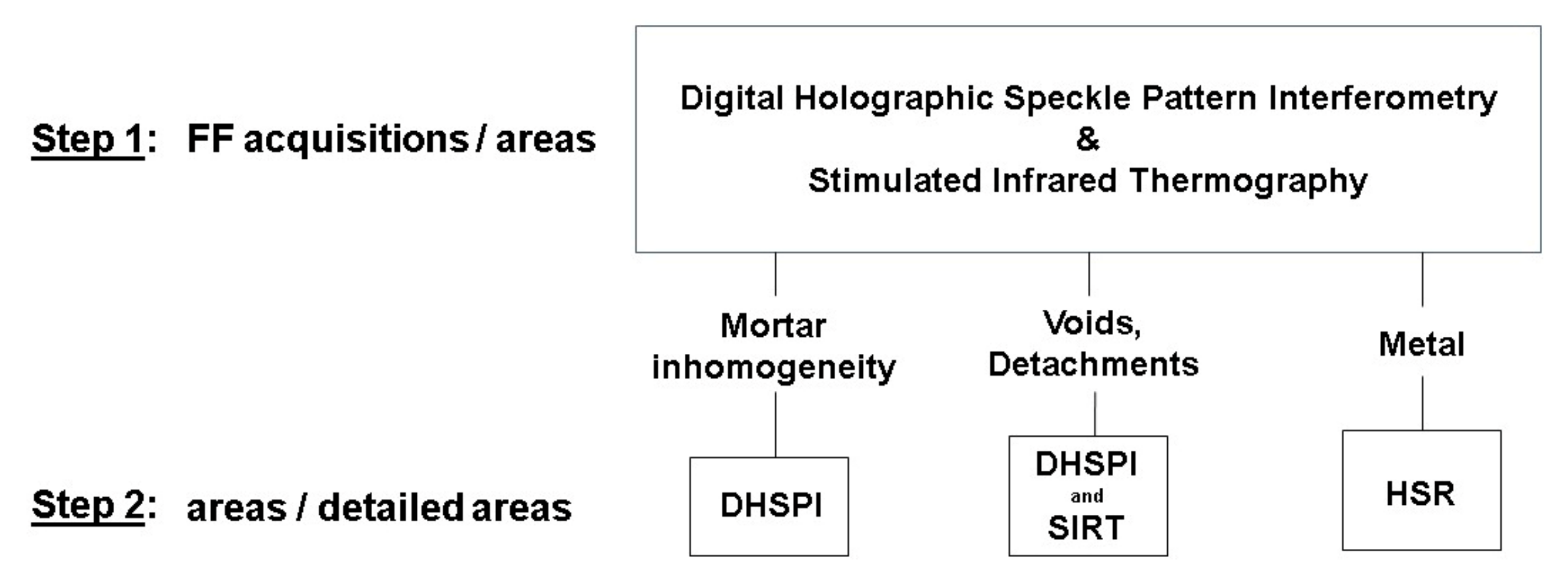
2.2.2. Digital Holographic Speckle Pattern Interferometry (DHSPI) and Stimulated Infrared Thermography (SIRT) Workstation
3. Results
3.1. Results of HSR Acquisitions
3.2. Results of DHSPI Acquisitions
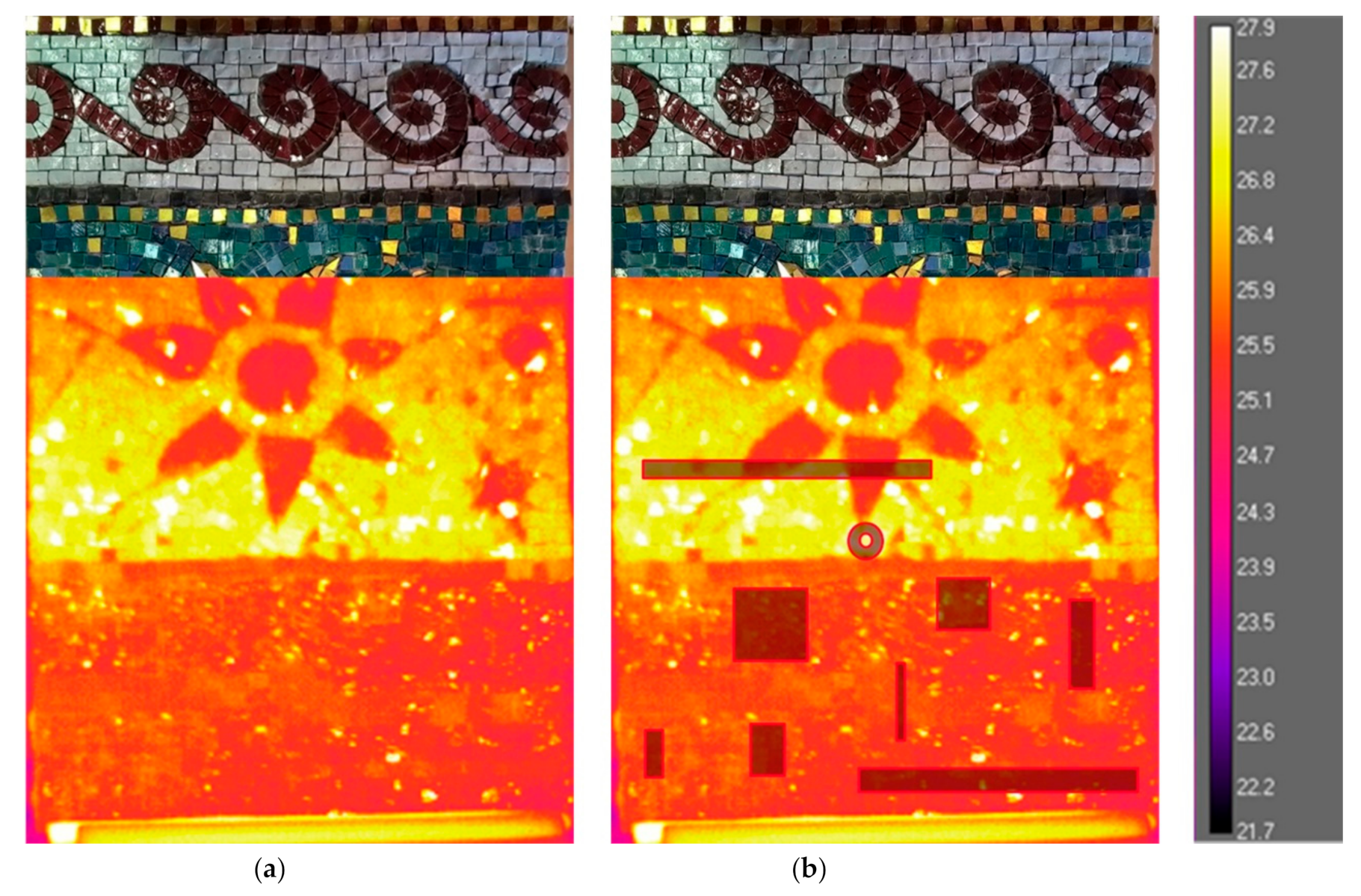
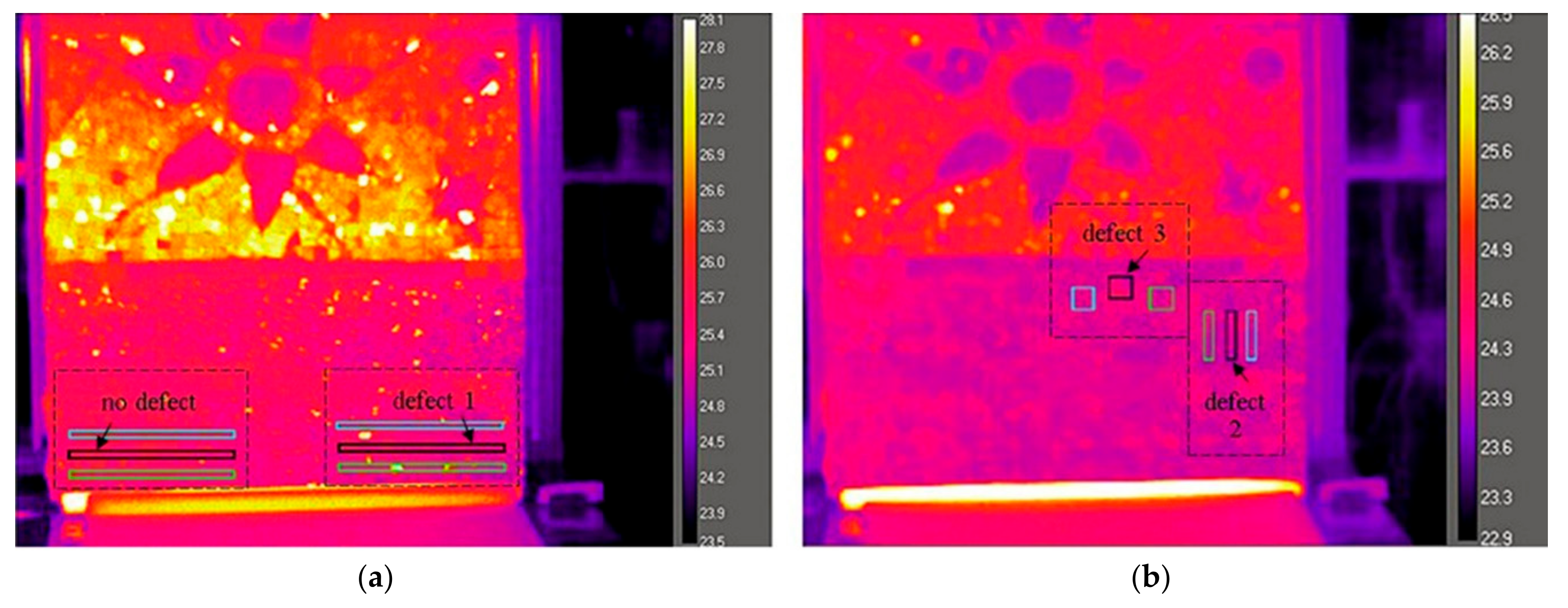
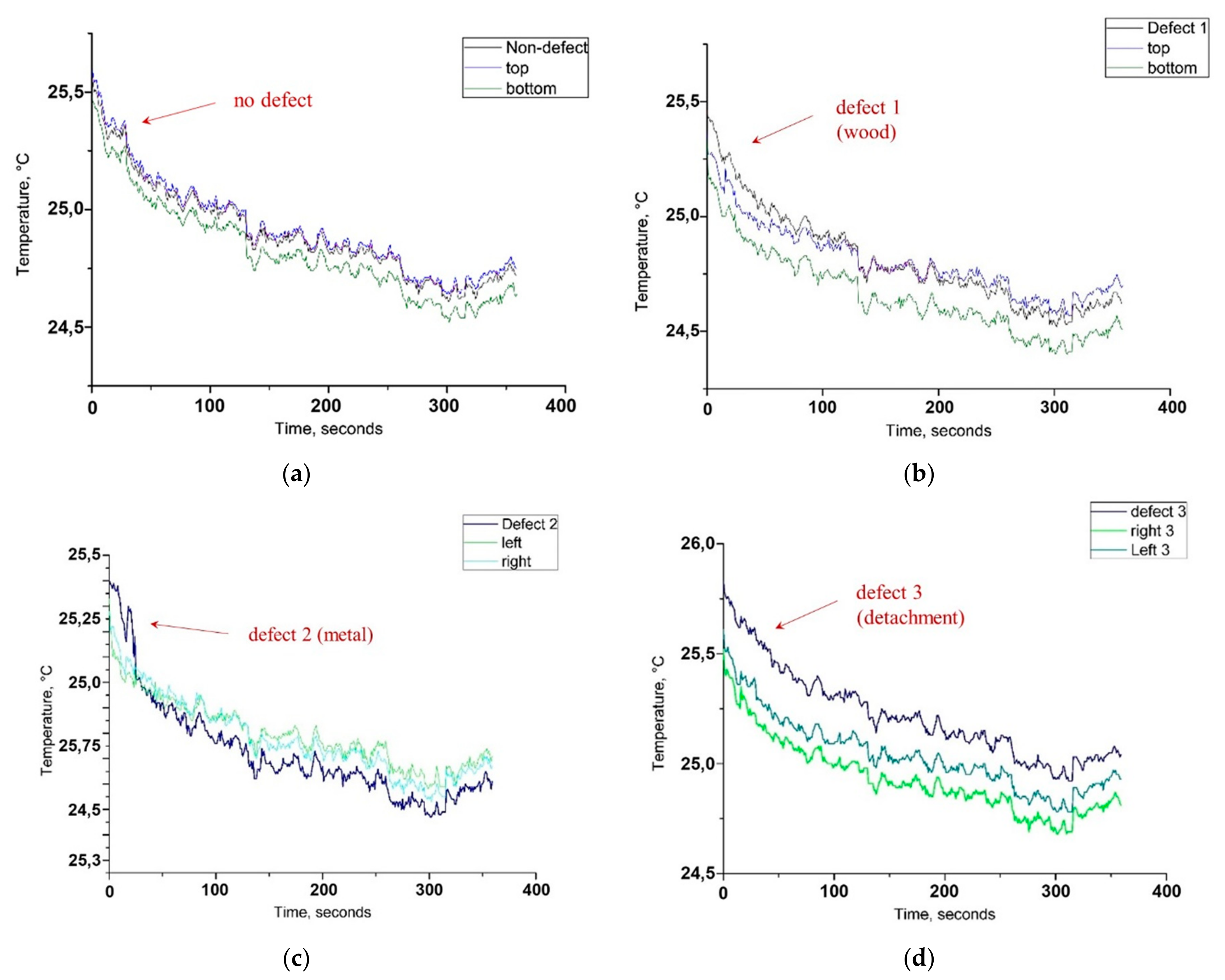
3.3. Results of SIRT Acquisitions
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Farneti, M. Glossario Tecnico-Storico del Mosaico: Con Una Breve Storia del Mosaico; Longo: Ravenna, Italy, 1993. [Google Scholar]
- Fiorentini Roncuzzi, I.; Fiorentini, E. Mosaic: Materials, Techniques and History; MWeV: Ravenna, Italy, 2002. [Google Scholar]
- Henig, M.; Ithaca, N.Y. A Handbook of Roman Art: A Comprehensive Survey of All the Arts of the Roman World; Cornell University Press: Ithaca, NY, USA, 1983. [Google Scholar]
- Hutter, I. Early Christian and Byzantine Art (History of Art and Architecture); Gardners Books: Eastbourne, UK, 1988. [Google Scholar]
- Demus, O. Byzantine Mosaic Decoration: Aspects of Monumental Art in Byzantium; Routledge & Kegan Paul: London, UK, 1948. [Google Scholar]
- Cléveno, D.; Degeorge, G. Ornament and Decoration in Islamic Architecture; Thames & Hudson: London, UK, 2000. [Google Scholar]
- Fiorentini Roncuzzi, I. Arte e Tecnologia nel Mosaico; Longo: Ravenna, Italy, 1971. [Google Scholar]
- Mellentin Haswell, J. Manual of Mosaic; Thames&Hudson: London, UK, 1973. [Google Scholar]
- Ben Abed, A.; Demas, M.; Roby, T. Lessons Learned: Reflecting on the Theory and Practice of Mosaic Conservation; Getty Conservation Istitute: Los Angeles, CA, USA, 2008. [Google Scholar]
- Vandini, M.; Fiore, C. Teoria e Pratica per la Conservazione del Mosaico; Il Prato: Padova, Italy, 2002. [Google Scholar]
- Μουρικη, Ντ. Τα ψηφιδωτα της νεας Μονης Χιου (Διτομο); ΕΜΠΟΡΙΚΗ ΤΡΑΠΕΖΑ ΕΛΛΑΔΟΣ: Athens, Greece, 1985. (In Greek) [Google Scholar]
- Von Landsberg, D. The history of lime production and use from early times to the industrial revolution. Zement-Kalk-Gips 1992, 45, 199–203. [Google Scholar]
- Schirripa, S.G.; Ambrosini, D.; Paoletti, D. Optical methods for mosaic diagnostics. J. Opt. 1998, 29, 394–400. [Google Scholar]
- Moropoulou, A.; Avdelidis, N.P.; Delegou, E.T.; Aggelakopoulou, E.; Karoglou, M.; Haralampopoulos, G.; Griniezakis, S.; Koui, M.; Karmis, P.; Aggelopoulos, A.; et al. Investigation for the compatibility of conservation interventions on Hagia Sophia mosaics using NDT techniques. J. Eur. Study Group Phys. Chem. Biol. Math. Tech. Appli. Archaeol. 2000, 59, 103–120. [Google Scholar]
- Martinho, E.; Dionísio, A. Main geophysical techniques used for non-destructive evaluation in cultutal built heritage: A review. J. Geophys. Eng. 2014, 11, 1–15. [Google Scholar] [CrossRef]
- Marcaida, I.; Maguregui, M.; Morillas, H.; Prieto-Taboada, N.; Veneranda, M.; Fdez-Ortiz de Vallejuelo, S.; Martellone, A.; De Nigris, B.; Osanna, M.; Madariaga, J. In situ non-invasive multianalytical methodology to characterize mosaic tesserae from the House of Gilded Cupids, Pompeii. Herit. Sci. 2019. [Google Scholar] [CrossRef]
- Artioli, G. Scientific Methods and Cultural Heritage: An. Introduction to the Application of Materials Science to Archaeometry and Conservation Science; Oxford University Press: Oxford, UK, 2010; EAN: 9780199548262. [Google Scholar]
- Angelo Orsoni Furnace Webite. Available online: https://www.orsoni.com (accessed on 4 April 2019).
- Verità, M. Mosaico vitreo e smalti: La tecnica, i Materiali, il degrado, la conservazione. In I Colori Della Luce: Angelo Orsoni e l’arte del Mosaico; Moldi, C., Ed.; Ravenna, Venice: Marsilio, Italy, 1996; pp. 41–97. (In Italian) [Google Scholar]
- Doremus, R.H. Glass Science, 2nd ed; Wiley: Hoboken, NJ, USA, 1994. [Google Scholar]
- Razevig, V.V.; Ivashov, S.I.; Vasiliev, I.A.; Zhuravlev, A.V.; Bechtel, T.; Capineri, L.; Falorni, P. RASCAN Holographic Radars as Means for Non-Destructive Testing of Buildings and Edificial Structures. In Proceedings of the Structural Faults and Repair-2010, Edinburgh, Scotland, UK, 15–17 June 2010. [Google Scholar]
- Ivashov, S.I.; Makarenkov, V.I.; Masterkov, A.V.; Razevig, V.V.; Sablin, V.N.; Sheyko, A.P.; Tchapourski, V.V.; Vasiliev, I.A. Concrete Floor Inspection with Help of Subsurface Radar. Proceedings of 6th Meeting Environmental and Engineering Geophysics, Bochum, Germany; 3–7 September 2000.
- Ivashov, S.; Razevig, V.; Sheyko, A.; Vasilyev, I.; Zhuravlev, A.; Bechtel, T. Holographic Subsurface Radar Technique and its Applications. In Proceedings of the 12th International Conference on Ground-Penetrating Radar, GPR 2008, Birmingham, UK, 16–19 June 2008. [Google Scholar]
- Capineri, L.; Falorni, P.; Borgioli, G.; Bulletti, A.; Valentini, S.; Ivashov, S.; Zhuravlev, A.; Razevig, V.; Vasiliev, I.; Paradiso, M.; et al. Application of the RASCAN Holographic Radar to Cultural Heritage Inspections. Archaeol. Prospect. 2009, 16, 218–230. [Google Scholar] [CrossRef]
- Capineri, L.; Falorni, P.; Ivashov, S.; Zhuravlev, A.; Vasiliev, I.; Razevig, V.; Bechtel, T.; Stankiewicz, G. Combined Holographic Subsurface Radar and Infrared Thermography for Diagnosis of the Conditions of Historical Structures and Artworks. Eur. Geosci. Union Gen. Assem. 2009, 11. EGU2009-5343-2. [Google Scholar] [CrossRef]
- Vasiliev, I.A.; Ivashov, S.I.; Makarenkov, V.I.; Sablin, V.N.; Sheyko, A.P. RF band high resolution sounding of building structures and works. IEEE Aerosp. Electron. Syst. Mag. 1999, 14, 25–28. [Google Scholar] [CrossRef][Green Version]
- Ivashov, S.I.; Capineri, L.; Bechtel, T. Holographic Subsurface Radar Technology and Applications. In UWB Radar Applications and Design; Taylor, J.D., Ed.; CRC Press: Boca Raton, FL, USA, 2012; pp. 421–444. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; IEE: London, UK, 2004; ISBN 0-86341-360-9. [Google Scholar]
- Gabor, D. A new microscopic principle. Nature 1948, 161, 777–778. [Google Scholar] [CrossRef]
- Razevig, V.V.; Zhuravlev, A.V.; Bugaev, A.S.; Chizh, M.A.; Ivashov, S.I. Imaging Under Irregular Surface Using Microwave Holography. In Progress in Electromagnetics Research Symposium—Fall (PIERS-FALL); IEEE: Piscataway, NJ, USA; pp. 172–177.
- Tornari, V. On development of portable Digital Holographic Speckle Pattern Interferometry system for remote-access monitoring and documentation in art conservation. Strain 201 2018, 55. [Google Scholar] [CrossRef]
- Tornari, V.; Tsigarida, A.; Ziampaka, V.; Kousiaki, F.; Kouloumpi, E. Interference Fringe Patterns in Documentation on Works of Art: Application on Structural Diagnosis of a Fresco Painting. Am. J. Arts Des. 2017, 2, 1–15. [Google Scholar] [CrossRef]
- Tornari, V.; Tsiranidou, E.; Bernikola, E. Interference fringe-patterns association to defect-types in artwork conservation: An experiment and research validation review. Appl. Phys. A 2012, 106, 397–410. [Google Scholar] [CrossRef]
- Kosma, K.; Andrianakis, M.; Hatzigiannakis, K.; Tornari, V. Digital holographic interferometry for cultural heritage structural diagnostics: A coherent and a low-coherence optical set-up for the study of a marquetry sample. Strain 2018, 54. [Google Scholar] [CrossRef]
- Tornari, V.; Bernikola, E.; Nevin, A.; Kouloumpi, E.; Doulgeridis, M.; Fotakis, C. Fully non-contact holography-based inspection on dimensionally responsive artwork materials. Sensors 2008, 8. [Google Scholar] [CrossRef] [PubMed]
- Tornari, V. Laser Interference-Based Techniques and Applications in Structural Inspection of Works of Art. Anal. Bioanal. Chem. 2007, 387, 761–780. [Google Scholar] [CrossRef]
- Schirripa Spagnolo, G.; Guattari, G.; Grinzato, E. Frescoes Diagnostics by electro-optic holography and infrared thermography. In Proceedings of the 6th World Conference on NDT and Microanalysis in Diagnostics and Conservation of Cultural and Environmental Heritage, Rome, Italy, 17–20 May 1999; pp. 385–398. [Google Scholar]
- Tornari, V.; Bernikola, E.; Tsigarida, N.; Andrianakis, M.; Hatzigiannakis, K.; Leissner, J. Preventive deformation measurements on cultural heritage materials based on non-contact surface response of model samples. Stud. Conserv. 2015, 60, S143–S158. [Google Scholar] [CrossRef]
- Bernikola, E.; Nevin, A.; Tornari, V. Rapid initial dimensional changes in wooden panel paintings due to simulated climate-induced alterations monitored by digital coherent out-of-plane interferometry. Appl. Phys. A 2009, 95, 387–399. [Google Scholar] [CrossRef]
- Tornari, V.; Andrianakis, M.; Hatzigiannakis, K.; Kosma, K.; Detalle, V.; Bourguignon, E.; Giovannacci, D.; Brissaud, D. Complimentarity of digital holographic speckle pattern interferometry and simulated infrared thermography for Cultural Heritage structural diagnostic research. Int. J. Eng. Res. Sci (IJOER) 2016, 2, 129–141. [Google Scholar]
- Vest, C.M. Holographic Interferometry; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1979; pp. 396–413. [Google Scholar]
- Maldague, X.P. Theory and Practice of Infrared Technology for Nondestructive Testing; Wiley-Interscience: Hoboken, NJ, USA, 2001; ISBN 978-0-471-18190-3. [Google Scholar]
- Theodorakeas, P.; Cheilakou, E.; Ftikou, E.; Koui, M. Passive and active infrared thermography: An overview of applications for the inspection of mosaic structures. In Proceedings of the 33rd UIT, Italian Union Thermo-Fluid Dynamics Heat Transfer Conference, L’Aquila, Italy, 22–24 June 2015. [Google Scholar] [CrossRef]
- Jo, Y.H. Study on Applicability of Passive Infrared Thermography Analysis for Blistering Detection of Stone Cultural Heritage. J. Conserv. Sci. 2013, 29, 55–67. [Google Scholar] [CrossRef][Green Version]
- Avdelidis, N.P.; Koui, M.; Ibarra-Castanedo, C.; Maldague, X. Thermographic studies of plastered mosaics. J. Infrared Phys. Tech. 2007, 49, 254–256. [Google Scholar] [CrossRef]
- Carlomagno, G.M.; Cardone, G. Infrared Thermography for convective heat transfer measurements. J. Exp. Fluids 2010, 49, 1187–1218. [Google Scholar] [CrossRef]
- Ibarra-Castanedo, C.; Gonzalez, D.; Klein, M.; Pilla, M.; Vallerand, S. Infrared image processing and data analysis. Infrared Phys. Tech. 2004, 46, 75–83. [Google Scholar] [CrossRef]
- Von Hippel, A.R. Dielectric Materials and Applications. In The International Critical Tables; Chapman & Hall: London, UK, 1954; p. 73. [Google Scholar]
- Incropera, F.; De Witt, D. Introduction to Heat Transfer, 2nd ed.; John Wiley and Sons:: Hoboken, NJ, USA, 1990. [Google Scholar]
- Young, H.D. University Physics, 7th ed.; Addison Wesley: Boston, MA, USA, 1992. [Google Scholar]
- Laureti, S.; Silipigni, G.; Senni, L.; Tomasello, R.; Burrascano, P.; Ricci, M. Comparative study between linear and non-linear frequency-modulated pulse-compression thermography. Appl. Opt. 2018, 57, D32–D39. [Google Scholar] [CrossRef] [PubMed]
- Laureti, S.; Mlekmohammadi, H.; Burrascano, P.; Hutchins, A.D.; Senni, L.; Silipigni, G.; Maldague, X.P.V.; Ricci, M. The use of pulse-compression thermography for detecting defects in paintings. NDT E Int. 2018, 98, 147–154. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Defect | Location Depth (mm) |
|---|---|
| wooden sticks (defect 1), steel plate (defect 2), air bubble wrap (defect 6) and metallic clip (defect 7) | 20 |
| synthetic sponge (defect 3), rubber ring (defect 4), metallic stick (defect 5), marble and glass tiles (defect 8) and steel nail (defect 9) | 15 |
| Defect 1 (Wood) | Max. T1 (°C) During the Cooling Down Monitoring | Min. T2 (°C) During the Cooling Down Monitoring | ΔTmax (T1–T2) |
|---|---|---|---|
| Defected area | 25.47 | 24.56 | 0.91 |
| Non-defected top | 25.38 | 24.58 | 0.80 |
| Non-defected bottom | 25.37 | 24.41 | 0.96 |
| Defect 2 (Steel) | Max. T1 (°C) During the Cooling Down Monitoring | Min. T2 (°C) During the Cooling Down Monitoring | ΔTmax (T1–T2) |
|---|---|---|---|
| Defected area | 25.40 | 24.48 | 0.92 |
| Non-defected left | 25.33 | 24.58 | 0.75 |
| Non-defected right | 25.28 | 24.56 | 0.72 |
| Defect 3 (Plastic and Air) | Max. T1 (°C) During the Cooling Down Monitoring | Min. T2 (°C) During the Cooling Down Monitoring | ΔTmax (T1–T2) |
|---|---|---|---|
| Defected area | 25.83 | 24.98 | 0.85 |
| Non-defected left | 25.61 | 24.79 | 0.82 |
| Non-defected right | 25.52 | 24.69 | 0.83 |
| Known Defects and Discontinuities | DHSPI | SIRT | HSR |
|---|---|---|---|
| Differences in composition and stitches of mortar | detectable | no detectable | only general inhomogeneity |
| detectable | detectable | not detectable |
| not detectable | detectable through data processing | detectable |
| detectable | detectable | not detectable |
| detectable | detectable | not detectable |
| detectable in detailed acquisitions | not detectable | not detectable |
| detectable | not detectable | not detectable |
| not detectable | not detectable | detectable |
| not detectable | not detectable | detectable |
| not detectable | not detectable | not detectable |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaban, A.; Tornari, V.; Deiana, R.; Andrianakis, M.; Giovannacci, D.; Detalle, V. A Combined Non-Invasive Approach to the Study of A Mosaic Model: First Laboratory Experimental Results. J. Imaging 2019, 5, 58. https://doi.org/10.3390/jimaging5060058
Chaban A, Tornari V, Deiana R, Andrianakis M, Giovannacci D, Detalle V. A Combined Non-Invasive Approach to the Study of A Mosaic Model: First Laboratory Experimental Results. Journal of Imaging. 2019; 5(6):58. https://doi.org/10.3390/jimaging5060058
Chicago/Turabian StyleChaban, Antonina, Vivi Tornari, Rita Deiana, Michalis Andrianakis, David Giovannacci, and Vincent Detalle. 2019. "A Combined Non-Invasive Approach to the Study of A Mosaic Model: First Laboratory Experimental Results" Journal of Imaging 5, no. 6: 58. https://doi.org/10.3390/jimaging5060058
APA StyleChaban, A., Tornari, V., Deiana, R., Andrianakis, M., Giovannacci, D., & Detalle, V. (2019). A Combined Non-Invasive Approach to the Study of A Mosaic Model: First Laboratory Experimental Results. Journal of Imaging, 5(6), 58. https://doi.org/10.3390/jimaging5060058