

Model-Based State-of-Charge and State-of-Health Estimation Algorithms Utilizing a New Free Lithium-Ion Battery Cell Dataset for Benchmarking Purposes



Abstract
1. Introduction
1.1. Direct Measurements for SOC and SOH Estimation
1.2. Model-Based SOC and SOH Estimation
1.3. Data-Driven SOC and SOH Estimation
1.4. Hybrid Estimation
1.5. Research Objective
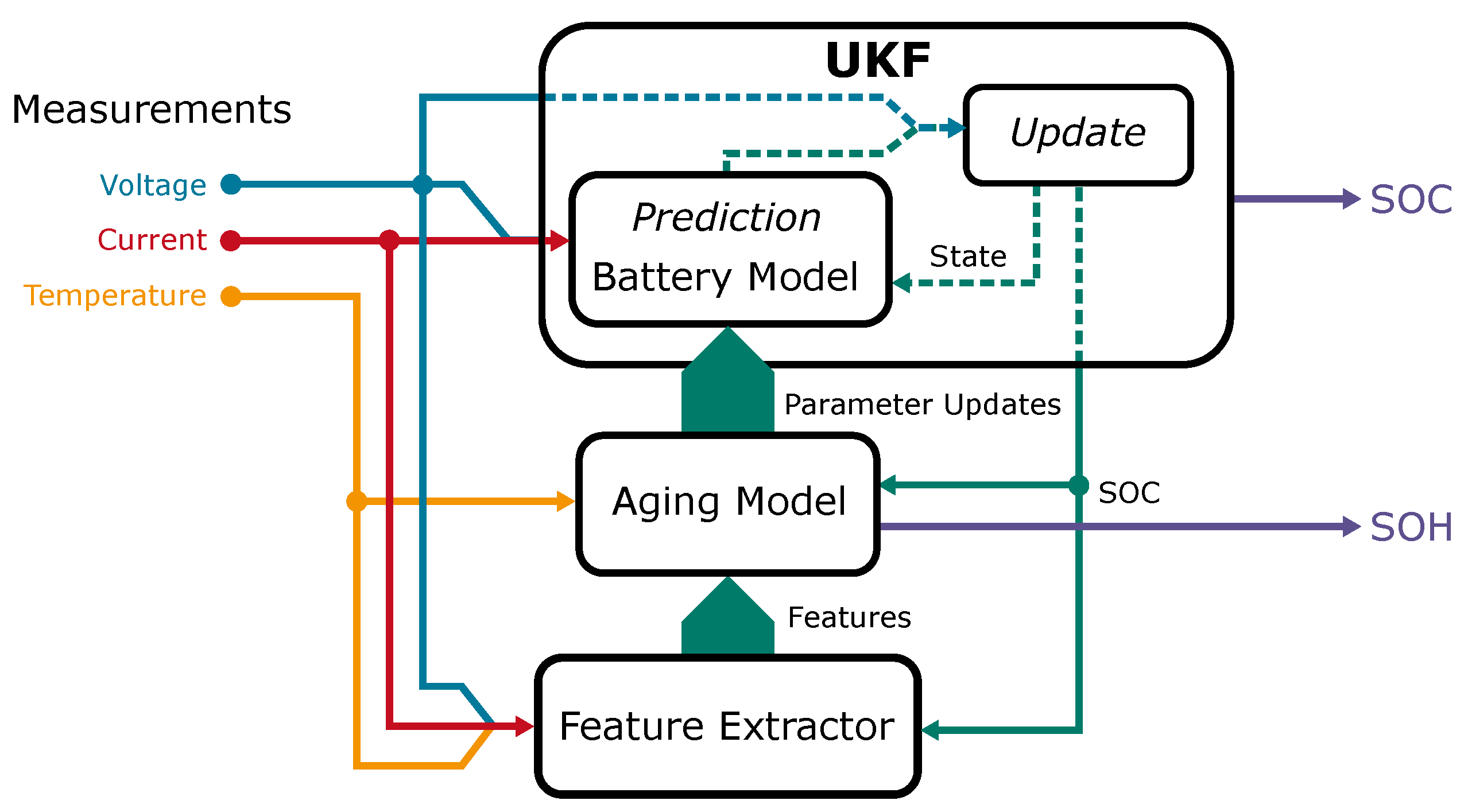
1.6. System Description
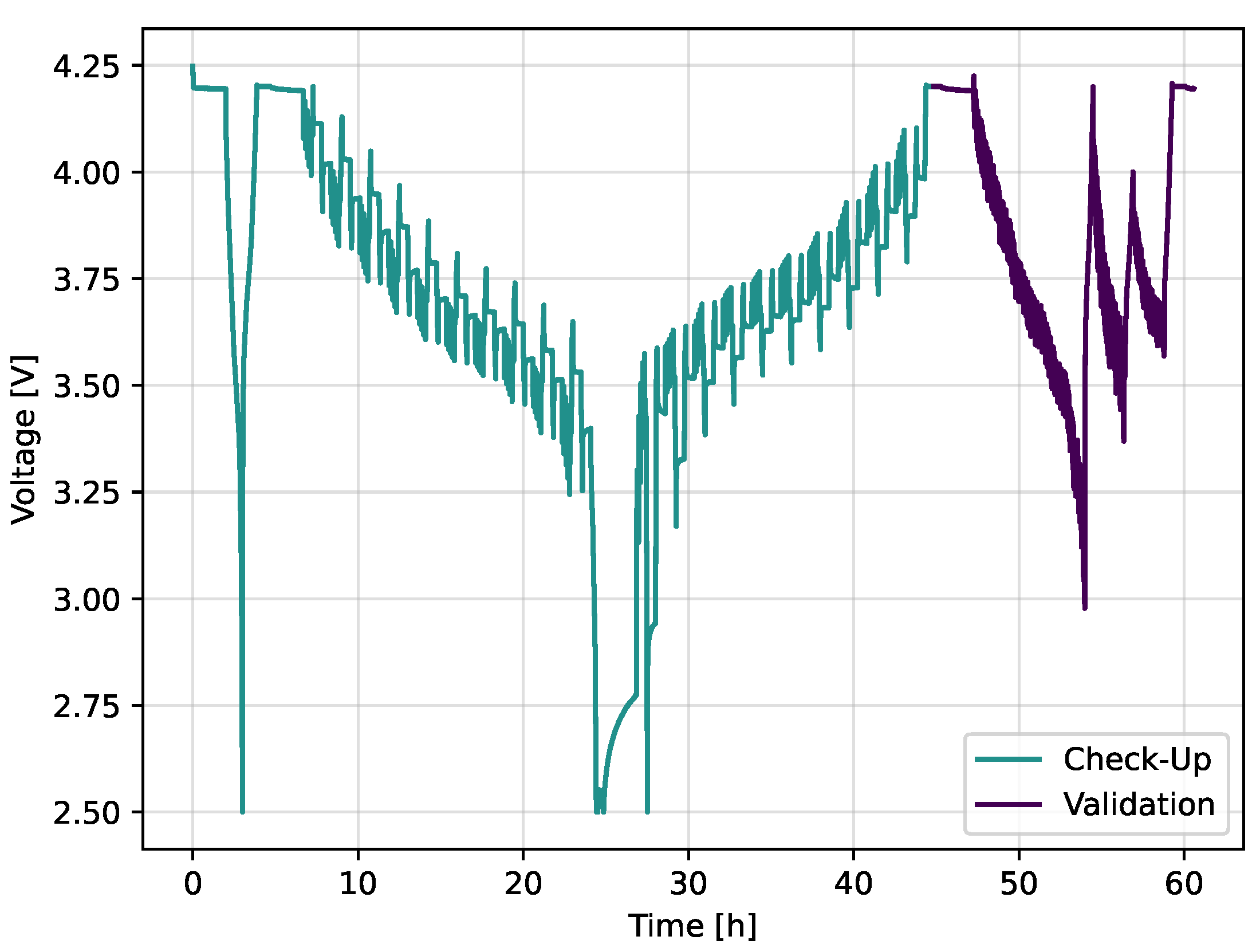
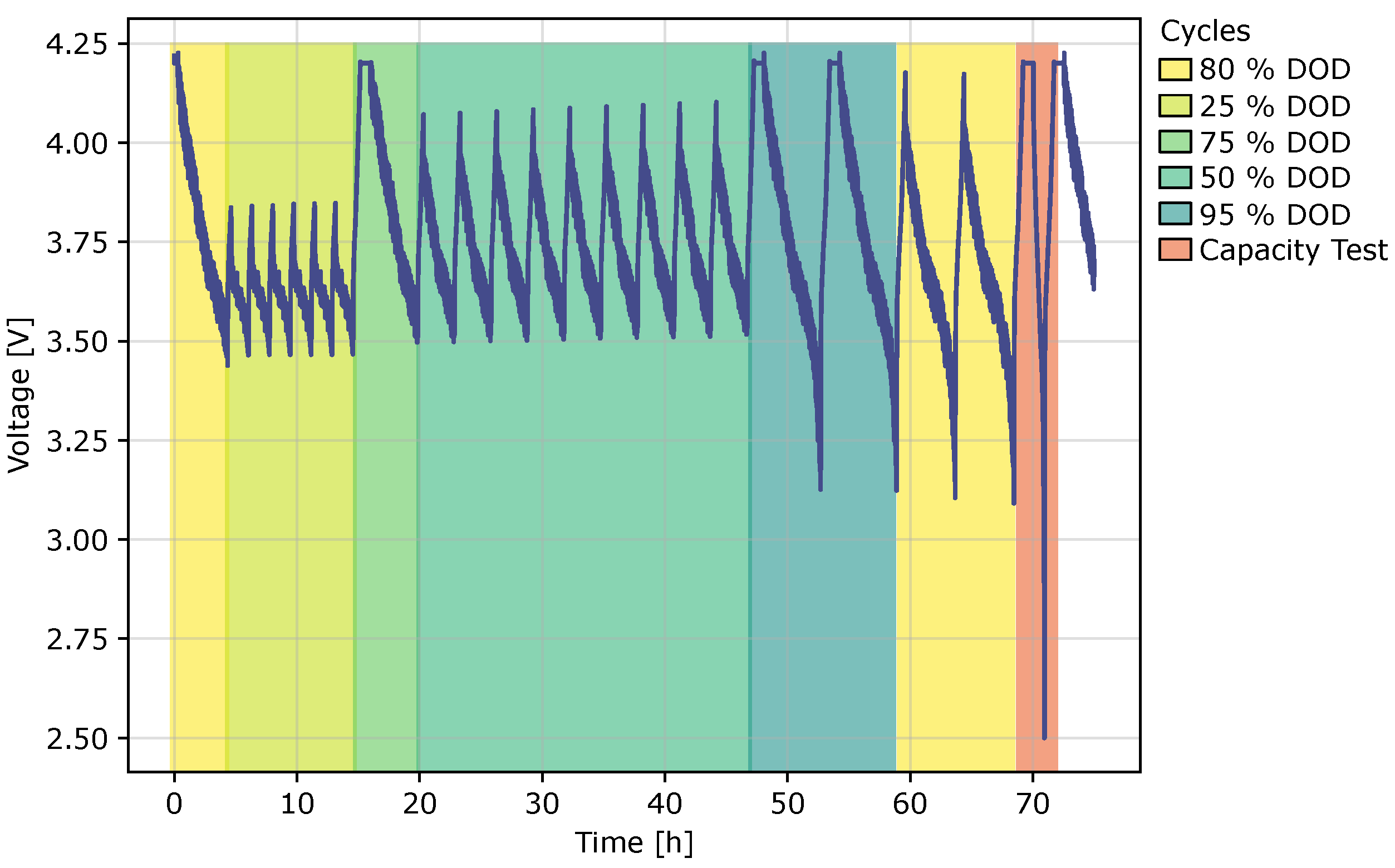
2. Measurements and Dataset
3. SOC Estimation
3.1. Dynamic Model Description
3.1.1. Dynamic Model Equations and Discretisation
3.1.2. Parameterisation
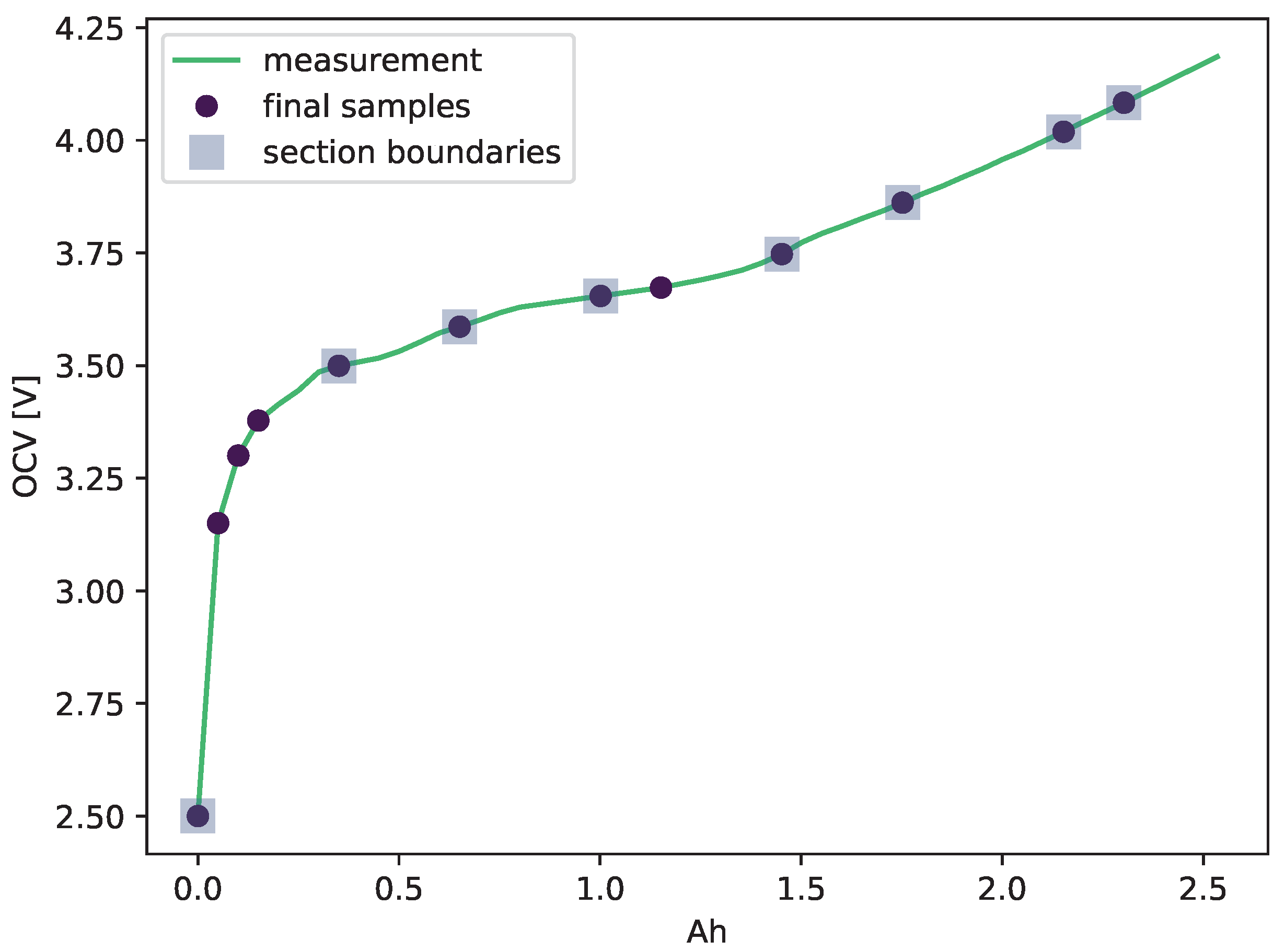
Open Circuit Voltage Modelling
- Calculation of the signed curvature of the OCV according to Narula [57]
- Find roots of the curvature to segment the OCV. Therefore, calculateto obtain the roots. Add the first measurement point and roots to the samples.
- Delete the inner samples if the section range is lower than 5% of the SOC for minimum section size.
- Allocate the samples equally to the sections.
- If there are still samples left:
- (a)
- Calculate the error and curvature peaks per section;
- (b)
- Add a sample to the section with the highest error;
- (c)
- Distribute samples equidistantly in sections;
- (d)
- Go to 5.
- Finished sampling the OCV.
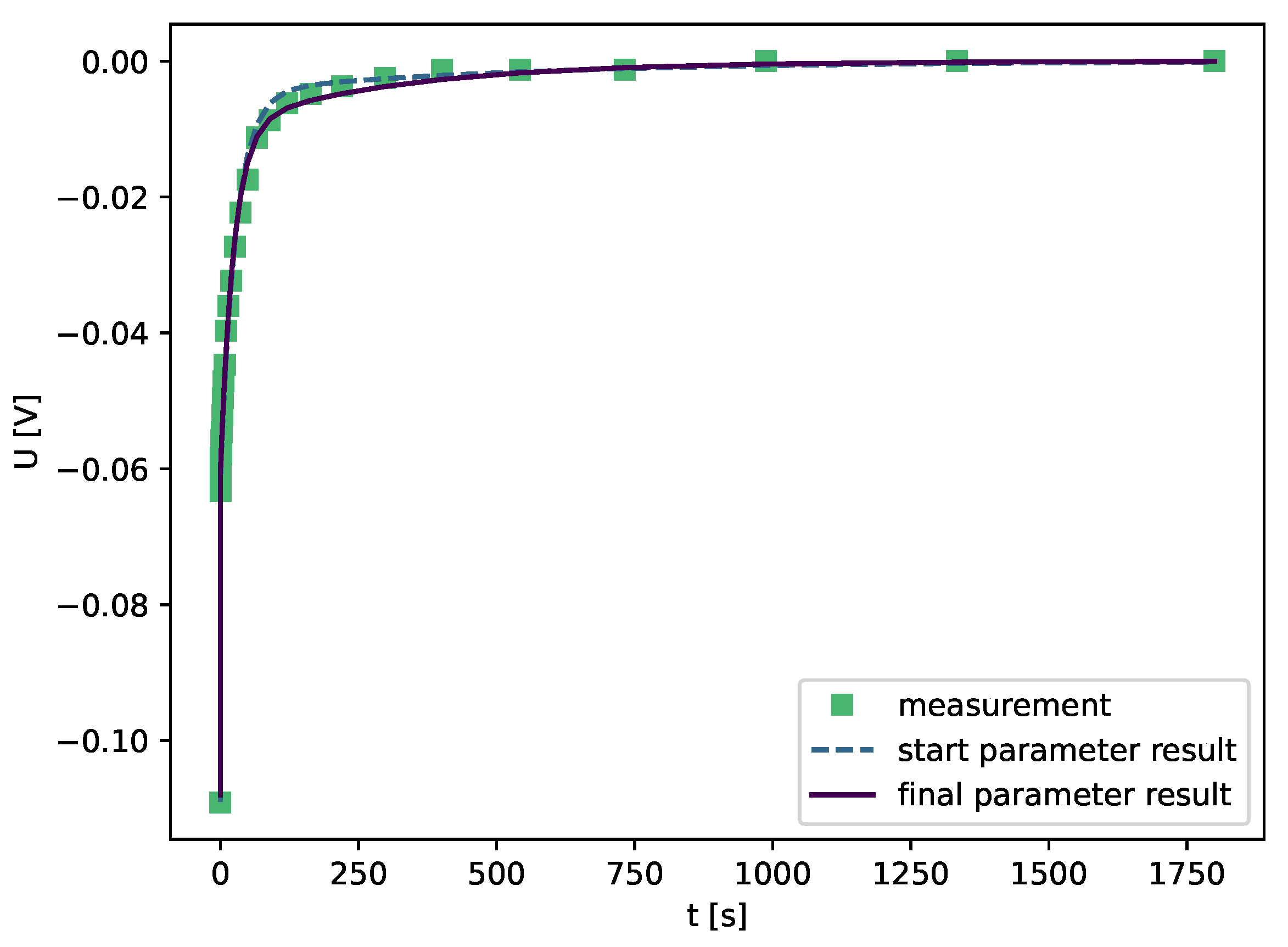
Dynamic Parameter Identification
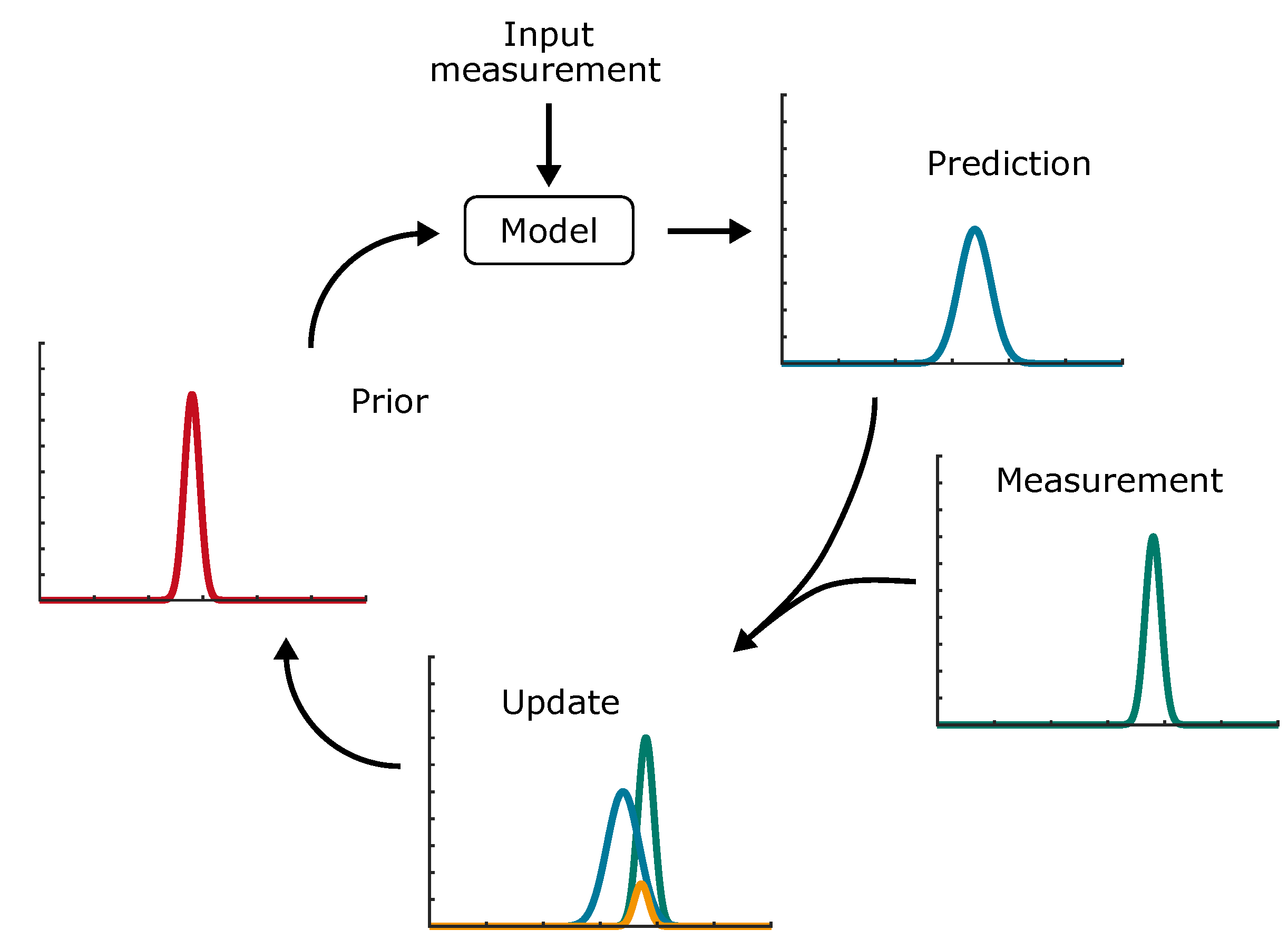
3.2. Unscented Kalman Filter
- Initialization of the mean and the covariance with expectations, where x is the state vector.
- Prediction of the current state, including sampling and weight calculation.
- (a)
- Calculate the sigma points based on the mean , depending on the dimension of the state vector and mean N, using the composite scaling factor :where the scaling factor iswith determining the spread of the samples, depends on the expected type of distribution, where for a Gaussian , and being the scaling factor, which is usually equal to .
- (b)
- Transform the samples using the model system equation and the input (u)
- (c)
- Calculate the predicted mean and covariance based on the samples by using the weights for the mean and for the covariance in addition to the process noise covarianceand augment the samples with additive noise
- (d)
- Calculate the output with the output equation of the model (H) using the samples and calculate its mean with the weights:
- The measurement update calculates the new state of the model using the prediction, the Kalman gain, and the measurement of the output. Furthermore, the measurement noise is added.
- (a)
- Calculate the Kalman gain:
- (b)
- Calculate the state and covariance of the state of the model using the Kalman gain and the measurement of the output ():
- (c)
- After the calculation of the current state, it is shifted to be the old state (), and the same is performed for the covariance (). Now, start all over again with the prediction steps, and so on.
4. SOH Estimation
4.1. Ageing Data Processing
4.2. Ageing Model
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BMS | Battery management system |
| CCCV | Constant current constant voltage |
| DOD | Depth of discharge |
| DRT | Distribution of relaxation times |
| ECM | Equivalent circuit model |
| EIS | Electrochemical impedance spectroscopy |
| EKF | Extended Kalman filter |
| FCE | Full-cycle equivalent |
| FUDS | Federal urban driving schedule |
| HPPC | Hybrid pulse power characterisation |
| WLTP | Worldwide harmonized light-duty vehicles test procedure |
| DST | Dynamic stress test |
| NEDC | New European driving cycle |
| ICA | Incremental capacity analysis |
| IR | Internal resistance |
| OCV | Open circuit voltage |
| RMSE | Root mean square error |
| RNN | Recursive neural network |
| SVM | Support vector machine |
| RUL | Remaining useful life |
| SOC | State of charge |
| SOH | State of health |
| SOF | State of function |
| SOA | Safe operating area |
| SPKF | Sigma-point Kalman filter |
| UKF | Unscented Kalman filter |
References
- Park, S.; Ahn, J.; Kang, T.; Park, S.; Kim, Y.; Cho, I.; Kim, J. Review of state-of-the-art battery state estimation technologies for battery management systems of stationary energy storage systems. J. Power Electron. 2020, 20, 1526–1540. [Google Scholar] [CrossRef]
- Ungurean, L.; Cârstoiu, G.; Micea, M.V.; Groza, V. Battery state of health estimation: A structured review of models, methods and commercial devices. Int. J. Energy Res. 2017, 41, 151–181. [Google Scholar] [CrossRef]
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Alvi, M.J.; Kim, H.-J. Towards a Smarter Battery Management System for Electric Vehicle Applications: A Critical Review of Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef]
- Kirchev, A. Battery Management and Battery Diagnostics. In Electrochemical Energy Storage for Renewable Sources and Grid Balancing; Elsevier: Amsterdam, The Netherlands, 2015; pp. 411–435. [Google Scholar]
- Vezzini, A. Lithium-Ion Battery Management. In Lithium-Ion Batteries; Elsevier: Amsterdam, The Netherlands, 2014; pp. 345–360. [Google Scholar]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- dos Reis, G.; Strange, C.; Yadav, M.; Li, S. Lithium-ion battery data and where to find it. Energy AI 2021, 5, 100081. [Google Scholar] [CrossRef]
- Kollmeyer, P. Panasonic 18650PF Li-ion Battery Data. Mendeley Data 2018. [Google Scholar] [CrossRef]
- Kollmeyer, P.; Vidal, C.; Naguib, M.; Skells, M. LG 18650HG2 Li-Ion Battery Data [Data Set]; Kaggle: San Francisco, CA, USA, 2023. [Google Scholar] [CrossRef]
- De Craemer, K.; Trad, K. Cyclic Ageing with Driving Profile of a Lithium Ion Battery Module; Version 1; 4TU. ResearchData: Delft, The Netherlands, 2021. [Google Scholar] [CrossRef]
- Jöst, D.; Ringbeck, F.; Blömeke, A.; Sauer, D.U. Timeseries Data of a Drive Cycle Aging Test of 28 High Energy NCA/C+Si Round Cells of Type 18650 = Zeitreihendaten eines Fahrzyklus-Alterungstests von 28 Hochenergie NCA/C+Si Rundzellen des Typs 18650; Institut für Stromrichtertechnik und Elektrische Antriebe: Aachen, Germany, 2021. [Google Scholar] [CrossRef]
- Hu, X.; Feng, F.; Liu, K.; Zhang, L.; Xie, J.; Liu, B. State estimation for advanced battery management: Key challenges and future trends. Renew. Sustain. Energy Rev. 2019, 114, 109344. [Google Scholar] [CrossRef]
- Ge, M.-F.; Liu, Y.; Jiang, X.; Liu, J. A review on state of health estimations and remaining useful life prognostics of lithium-ion batteries. Measurement 2021, 174, 109057. [Google Scholar] [CrossRef]
- Berecibar, M.; Gandiaga, I.; Villarreal, I.; Omar, N.; van Mierlo, J. Critical review of state of health estimation methods of Li-ion batteries for real applications. Renew. Sustain. Energy Rev. 2016, 56, 572–587. [Google Scholar] [CrossRef]
- Baghdadi, I.; Briat, O.; Delétage, J.-Y.; Gyan, P.; Vinassa, J.-M. Lithium battery aging model based on Dakin’s degradation approach. J. Power Sources 2016, 325, 273–285. [Google Scholar] [CrossRef]
- Li, Y.; Liu, K.; Foley, A.M.; Zülke, A.; Berecibar, M.; Nanini-Maury, E.; Van Mierlo, J.; Hoster, H.E. Data-driven health estimation and lifetime prediction of lithium-ion batteries: A review. Renew. Sustain. Energy Rev. 2019, 113, 109254. [Google Scholar] [CrossRef]
- Wang, Z.; Feng, G.; Zhen, D.; Gu, F.; Ball, A. A review on online state of charge and state of health estimation for lithium-ion batteries in electric vehicles. Energy Rep. 2021, 7, 5141–5161. [Google Scholar] [CrossRef]
- Ling, L.; Wei, Y. State-of-Charge and State-of-Health Estimation for Lithium-Ion Batteries Based on Dual Fractional-Order Extended Kalman Filter and Online Parameter Identification. IEEE Access 2021, 9, 47588–47602. [Google Scholar] [CrossRef]
- Bustos, R.; Gadsden, S.A.; Al-Shabi, M.; Mahmud, S. Lithium-Ion Battery Health Estimation Using an Adaptive Dual Interacting Model Algorithm for Electric Vehicles. Appl. Sci. 2023, 13, 1132. [Google Scholar] [CrossRef]
- Du, C.-Q.; Shao, J.-B.; Wu, D.-M.; Ren, Z.; Wu, Z.-Y.; Ren, W.-Q. Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles. Electronics 2022, 11, 181. [Google Scholar] [CrossRef]
- Gismero, A.; Schaltz, E.; Stroe, D.-I. Recursive State of Charge and State of Health Estimation Method for Lithium-Ion Batteries Based on Coulomb Counting and Open Circuit Voltage. Energies 2020, 13, 1811. [Google Scholar] [CrossRef]
- Huang, Z.; Best, M.; Knowles, J.; Fly, A. Adaptive Piecewise Equivalent Circuit Model With SOC/SOH Estimation Based on Extended Kalman Filter. IEEE Trans. Energy Convers. 2023, 38, 959–970. [Google Scholar] [CrossRef]
- Jin, S.; Yang, X.; Wang, C.; Wang, S.; Store, D.-I. A novel robust back propagation neural networkdual extended Kalman filter model for state-ofcharge and state-of-health co-estimation of lithiumion batteries. In Proceedings of the 2023 IEEE PES Conference on Innovative Smart Grid Technologies-Middle East (ISGT Middle East), Abu Dhabi, United Arab Emirates, 12–15 March 2023. [Google Scholar]
- Lai, X.; Yuan, M.; Tang, X.; Yao, Y.; Weng, J.; Gao, F.; Ma, W.; Zheng, Y. Co-Estimation of State-of-Charge and State-of-Health for Lithium-Ion Batteries Considering Temperature and Ageing. Energies 2022, 15, 7416. [Google Scholar] [CrossRef]
- Li, R.; Li, W.; Zhang, H. State of Health and Charge Estimation Based on Adaptive Boosting integrated with particle swarm optimization/support vector machine (AdaBoost-PSO-SVM) Model for Lithium-ion Batteries. Int. J. Electrochem. Sci. 2022, 17, 2. [Google Scholar] [CrossRef]
- Li, Q.; Miao, S.; Liu, S.; Ma, B.; Qi, W.; Jin, W.; Cheng, Z. A Joint State Estimation Framework for Lithium-ion Batteries based on Hybrid Method. J. Phys. Conf. Ser. 2022, 2276, 12023. [Google Scholar] [CrossRef]
- Liu, S.; Dong, X.; Yu, X.; Ren, X.; Zhang, J.; Zhu, R. A method for state of charge and state of health estimation of lithium-ion battery based on adaptive unscented Kalman filter. Energy Rep. 2022, 8, 426–436. [Google Scholar] [CrossRef]
- Mahboubi, D.; Gavzan, I.J.; Saidi, M.H.; Ahmadi, N. State of charge estimation for lithium-ion batteries based on square root sigma point Kalman filter considering temperature variations. IET Electr. Syst. Transp. 2022, 12, 165–180. [Google Scholar] [CrossRef]
- Ren, P.; Wang, S.; Huang, J.; Chen, X.; He, M.; Cao, W. Novel co-estimation strategy based on forgetting factor dual particle filter algorithm for the state of charge and state of health of the lithium-ion battery. Int. J. Energy Res. 2022, 46, 1094–1107. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, X.; Zhang, H.; Yang, F.; Tong, L.; Yang, Y.; Yan, D.; Yang, A.; Yu, M.; Liu, Z.; et al. Online identification of battery model parameters and joint state of charge and state of health estimation using dual particle filter algorithms. Int. J. Energy Res. 2022, 46, 19615–19652. [Google Scholar] [CrossRef]
- Petzl, M.; Danzer, M.A. Advancements in OCV Measurement and Analysis for Lithium-Ion Batteries. IEEE Trans. Energy Convers. 2013, 28, 675. [Google Scholar] [CrossRef]
- Kellner, Q.; Hosseinzadeh, E.; Chouchelamane, G.; Widanage, W.D.; Marco, J. Battery cycle life test development for high-performance electric vehicle applications. J. Energy Storage 2018, 15, 228. [Google Scholar] [CrossRef]
- Klee Barillas, J.; Li, J.; Günther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Ren, H.; Zhao, Y.; Chen, S.; Yang, L. A comparative study of lumped equivalent circuit models of a lithium battery for state of charge prediction. Int. J. Energy Res. 2019, 43, 7306–7315. [Google Scholar] [CrossRef]
- Krewer, U.; Röder, F.; Harinath, E.; Braatz, R.D.; Bedürftig, B.; Findeisen, R. Review—Dynamic Models of Li-Ion Batteries for Diagnosis and Operation: A Review and Perspective. J. Electrochem. Soc. 2018, 165, A3656–A3673. [Google Scholar] [CrossRef]
- Doyle, M.; Fuller, T.F.; Newman, J. Modeling of Galvanostatic Charge and Discharge of the Lithium/Polymer/Insertion Cell. J. Electrochem. Soc. 1993, 140, 1526–1533. [Google Scholar] [CrossRef]
- Richardson, M.; Korotkin, I.; Ranom, R.; Castle, M.; Foster, J.M. Generalised single particle models for high-rate operation of graded lithium-ion electrodes: Systematic derivation and validation. Electrochim. Acta 2020, 339, 135862. [Google Scholar] [CrossRef]
- Howey, D.A.; Bizeray, A.M.; Kim, J.-H.; Duncan, S.R. Parameterisation of the Single Particle Model for Lithium-Ion Cells. In Proceedings of the UKACC 12th International Conference on Control (CONTROL), Piscataway, NJ, USA, 5–7 September 2018. [Google Scholar]
- Li, J.; Lotfi, N.; Landers, R.G.; Park, J. A Single Particle Model for Lithium-Ion Batteries with Electrolyte and Stress-Enhanced Diffusion Physics. J. Electrochem. Soc. 2017, 164, A874–A883. [Google Scholar] [CrossRef]
- Pang, H.; Mou, L.; Guo, L.; Zhang, F. Parameter identification and systematic validation of an enhanced single-particle model with aging degradation physics for Li-ion batteries. Electrochim. Acta 2019, 307, 474–487. [Google Scholar] [CrossRef]
- Lotfi, N.; Li, J.; Landers, R.G.; Park, J. Li-ion Battery State of Health Estimation based on an improved Single Particle model. In Proceedings of the American Control Conference, Seattle, WA, USA, 24–26 May 2017. [Google Scholar]
- Laue, V.; Röder, F.; Krewer, U. Practical identifiability of electrochemical P2D models for lithium-ion batteries. Electrochim. Acta 2021, 51, 1253–1265. [Google Scholar] [CrossRef]
- Moura, S.J.; Argomedo, F.B.; Klein, R.; Mirtabatabaei, A.; Krstic, M. Battery State Estimation for a Single Particle Model With Electrolyte Dynamics. IEEE Trans. Control Syst. Technol. 2017, 25, 453–468. [Google Scholar] [CrossRef]
- Zhang, D.; Dey, S.; Couto, L.D.; Moura, S.J. Battery Adaptive Observer for a Single-Particle Model With Intercalation-Induced Stress. IEEE Trans. Control Syst. Technol. 2020, 28, 1363–1377. [Google Scholar] [CrossRef]
- Saidani, F.; Hutter, F.X.; Scurtu, R.-G.; Braunwarth, W.; Burghartz, J.N. Lithium-ion battery models: A comparative study and a model-based powerline communication. Adv. Radio Sci. 2017, 15, 83–91. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Madani, S.S.; Schaltz, E.; Kær, S.K. A Review of Different Electric Equivalent Circuit Models and Parameter Identification Methods of Lithium-Ion Batteries. ECS Trans. 2018, 87, 23–37. [Google Scholar] [CrossRef]
- Andrea, D. Lithium-Ion Batteries and Applications. A Practical and Comprehensive Guide to Lithium-Ion Batteries and Arrays, from Toys to Towns; Artech House: Boston, MA, USA, 2020. [Google Scholar]
- Wu, J.; Jiao, C.; Chen, M.; Chen, J.; Zhang, Z. SOC Estimation of Li-ion Battery by Adaptive Dual Kalman Filter under Typical Working Conditions. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019. [Google Scholar]
- How, D.N.; Hannan, M.A.; Lipu, M.H.; Ker, P.J. A State of Charge Estimation for Lithium-Ion Batteries Using Model-Based and Data-Driven Methods: A Review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Fleischer, C.; Waag, W.; Heyn, H.-M.; Sauer, D.U. On-line adaptive battery impedance parameter and state estimation considering physical principles in reduced order equivalent circuit battery models part 2. Parameter and state estimation. J. Power Sources 2014, 262, 457–482. [Google Scholar] [CrossRef]
- Sundaresan, S.; Devabattini, B.C.; Kumar, P.; Pattipati, K.R.; Balasingam, B. Tabular Open Circuit Voltage Modelling of Li-Ion Batteries for Robust SOC Estimation. Energies 2022, 15, 9142. [Google Scholar] [CrossRef]
- Lavigne, L.; Sabatier, J.; Francisco, J.M.; Guillemard, F.; Noury, A. Lithium-ion Open Circuit Voltage (OCV) curve modelling and its ageing adjustment. J. Power Sources 2016, 324, 694. [Google Scholar] [CrossRef]
- Yu, Q.-Q.; Xiong, R.; Wang, L.-Y.; Lin, C. A Comparative Study on Open Circuit Voltage Models for Lithium-ion Batteries. Chin. J. Mech. Eng. 2018, 31, 1–8. [Google Scholar] [CrossRef]
- Pillai, P.; Kumar, P.; Pattipatti, K.R.; Balasingam, B. Open-Circuit Voltage Models for Battery Management Systems: A Review. Energies 2022, 15, 6803. [Google Scholar] [CrossRef]
- Narula, M. Curve Curvature in Python. 2022. Available online: https://www.delftstack.com/howto/numpy/curvature-formula-numpy/ (accessed on 4 April 2023).
- Wan, T.H.; Saccoccio, M.; Chen, C.; Ciucci, F. Influence of the discretization methods on the distribution of relaxation times deconvolution: Implementing radial basis functions with DRTtools. Electrochim. Acta 2015, 184, 483–499. [Google Scholar] [CrossRef]
- Newville, M. Lmfit/lmfit-py: 1.1.0. Version: 1.1.0. Zenodo. 2022. Available online: https://lmfit.github.io/lmfit-py/ (accessed on 10 October 2022).
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB® Exercises; John Wiley and Sons, Inc.: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Haykin, S. Kalman Filtering and Neural Networks; John Wiley and Sons, Inc.: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Li, Y.; Vilathgamuwa, M.; Farrell, T.; Tran, N.T.; Teague, J. A physics-based distributed-parameter equivalent circuit model for lithium-ion batteries. Electrochim. Acta 2019, 299, 451–469. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Yang, B.; Wang, J.; Cao, P.; Zhu, T.; Shu, H.; Chen, J.; Zhang, J.; Zhu, J. Classification, summarization and perspectives on state-of-charge estimation of lithium-ion batteries used in electric vehicles: A critical comprehensive survey. J. Energy Storage 2021, 39, 102572. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Nominal Capacity | |
| Nominal Voltage | |
| Final Discharge Voltage | |
| Charging End Voltage | |
| Maximum Constant Discharge Current | |
| Maximum Charging Current |
| Temperature (°C) | DOD | Number of Cells | Cyclic Ageing | |
|---|---|---|---|---|
| 25 | 1 | 0.5 | 4 | Constant current |
| 25 | 0.3 | 0.35 | 4 | Constant current |
| 25 | 0.3 | 0.65 | 4 | Constant current |
| 45 | 1 | 0.5 | 4 | Constant current |
| 45 | 0.3 | 0.35 | 4 | Constant current |
| 45 | 0.3 | 0.65 | 4 | Constant current |
| 23 | 0.7 | 0.5 | 2 | Constant current |
| 23 | 0.3 | 0.5 | 2 | Constant current |
| 23 | 1 | 0.5 | 2 | Dynamic profile |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neupert, S.; Kowal, J. Model-Based State-of-Charge and State-of-Health Estimation Algorithms Utilizing a New Free Lithium-Ion Battery Cell Dataset for Benchmarking Purposes. Batteries 2023, 9, 364. https://doi.org/10.3390/batteries9070364
Neupert S, Kowal J. Model-Based State-of-Charge and State-of-Health Estimation Algorithms Utilizing a New Free Lithium-Ion Battery Cell Dataset for Benchmarking Purposes. Batteries. 2023; 9(7):364. https://doi.org/10.3390/batteries9070364
Chicago/Turabian StyleNeupert, Steven, and Julia Kowal. 2023. "Model-Based State-of-Charge and State-of-Health Estimation Algorithms Utilizing a New Free Lithium-Ion Battery Cell Dataset for Benchmarking Purposes" Batteries 9, no. 7: 364. https://doi.org/10.3390/batteries9070364
APA StyleNeupert, S., & Kowal, J. (2023). Model-Based State-of-Charge and State-of-Health Estimation Algorithms Utilizing a New Free Lithium-Ion Battery Cell Dataset for Benchmarking Purposes. Batteries, 9(7), 364. https://doi.org/10.3390/batteries9070364